DOI: 10.11817/j.issn.1672-7207.2016.12.041
��������Ⱥ�Ż�ͶӰѰ�ٻع�ģ�͵Ķ�ʱ��ͨ��Ԥ��
���䴺1, 2��������1���ִ���1��������1������1
(1. ���ִ�ѧ ��ͨѧԺ������ ������130022��
2. �ൺ������ѧ �����뽻ͨѧԺ��ɽ�� �ൺ��266520)
ժҪ����Զ�ʱ��ͨ�����ݵĸ߶ȸ����ԡ�����Ժͷ��ȶ��ԣ�Ϊ�˽�һ����߶�ʱ��ͨ��Ԥ��ľ��ȣ����һ�ֻ�������Ⱥ�Ż�ͶӰѰ�ٻع�ģ�͵Ķ�ʱ��ͨ��Ԥ�ⷽ����ͨ����ɫ�����ȷ���ȷ����ͨ��Ԥ��Ӱ�����ӣ�Ȼ���������Ⱥ�Ż��㷨�����Dz���ͶӰѰ�ٻع�ģ�ͣ��������Ϻ����ϱ��ܿ���·�ĸ�Ӧ��Ȧʵ�����ݽ���ʵ����֤�ͶԱȷ�����ʵ����������PSO-PPRģ�͵Ķ�ʱ��ͨ��Ԥ��Ч��������ߣ���ƽ��Ԥ�⾫�ȷֱ��ARIMAģ�ͺ�BPNNģ�����37.8%��27.2%��
�ؼ��ʣ����ܽ�ͨϵͳ����ʱ��ͨ��Ԥ�⣻ͶӰѰ�ٻع�ģ�ͣ�����Ⱥ�Ż�����ɫ�����ȷ���
��ͼ����ţ�U491 ���ױ�־�룺A ���±�ţ�1672-7207(2016)12-4277-06
Short�Cterm traffic flow prediction method based on particle swarm optimization projection pursuit regression model
BING Qichun1, 2, GONG Bowen1, LIN Ciyun1, YANG Zhaosheng1, QU Xin1
(1. College of Transportation, Jilin University, Changchun 130022, China;
2. College of Automobile and Transportation, Qingdao Technological University, Qingdao 266520, China)
Abstract: Considering the highly complexity, randomness and non-stability characteristics of short-time traffic flow data, a short�Cterm traffic flow prediction method based on particle swarm optimization projection pursuit regression model was put forward. Traffic flow forecasting impact factors were determined by grey relational analysis. Then the projection pursuit nonparametric regression traffic flow forecasting model was constructed using particle swarm optimization algorithm. Finally, validation and comparative analyses were carried out using inductive loop data measured from the north-south viaduct in Shanghai. The results indicate that the proposed PSO-PPR model achieves better prediction performance than comparison methods. The average prediction accuracy of proposed method is 37.8% and 27.2% higher than ARIMA model and BPNN model, respectively.
Key words: intelligent transportation systems; short-term traffic flow prediction; projection pursuit regression model; particle swarm optimization; grey relational analysis
ȷ���ɿ��Ľ�ͨ��Ԥ����Ϣ�����ܽ�ͨϵͳ(intelligent transportation systems��ITS)�Ļ����ؼ�����Ԥ�⾫��ֱ��Ӱ��������Ӧ��ͨ����ϵͳ�Լ���̬��ͨ�յ�ϵͳ�ȶ���ITS���Ĺ��ܵ�Ӧ��Ч�������ڽ�ͨ��Ԥ����Ϣ����Ҫ�ԣ���ʱ��ͨ��Ԥ��һֱ�����ܽ�ͨ������о��ȵ㣬�����о�����Ԥ�ⷽ����ģ�͡�VOORT��[1]��ARIMAģ��Ӧ���ڶ�ʱ��ͨ��Ԥ������WILLIAMS��[2]���ǽ�ͨ���������ԣ�ȫ���ϵͳ�ز����˼�����ARIMAģ���ڶ�ʱ��ͨ��Ԥ���е�Ӧ�ã������ֵ�[3]Ϊ�˿˷���һԤ��ģ�����ܲ��ȶ������⣬����˻���Լ���������˲��Ķ�ʱ��ͨ�������Ԥ��ģ�ͣ��ڱ���[4]������K�����㷨��ʱ��Ϳռ�����������4��״̬������ϵ�K����ģ�ͣ�DAVIS��[5]Ӧ�÷Dz����ع�ģ�ͽ��ж�ʱ��ͨ��Ԥ�⡣���⣬�����˹����ܼ����ķ�չ��������ģ��[6-8]��֧��������ģ��[9-10]�ȱ��㷺Ӧ���ڶ�ʱ��ͨ��Ԥ������Ȼ�������ڶ�ʱ��ͨ�����ݵĸ߶ȸ����ԡ�����Ժͷ��ȶ��ԣ�Ŀǰ��Ԥ�ⷽ���ձ����ʵʱ�ԲѰ���ٶ�����ά�������Լ�ģ�ͼ�����������Ȳ��㣬����Ӱ���Ŷ�ʱ��ͨ��Ԥ���ʵ��Ӧ��Ч�����������Ԥ�ⷽ�����ڵ����⣬�������������������Ⱥ�Ż�ͶӰѰ�ٻع�ģ�͵Ķ�ʱ��ͨ��Ԥ�ⷽ��������ͨ����ɫ�����ȷ���ȷ��Ԥ��Ӱ�����ӣ�Ȼ����������Ⱥ�Ż��㷨����ͶӰѰ�ٻع齻ͨ��Ԥ��ģ�ͣ��������Ϻ����ϱ��ܿ���·�ĸ�Ӧ��Ȧʵ�����ݽ���ʵ����֤����ģ�͵���Ч�Խ��в��ԡ�
1 ͶӰѰ�ٻع�ģ��
ͶӰѰ�ٻع�(project pursuit regression��PPR)ģ���ǽ�ͶӰѰ�ټ�����ʱ�����еĻع�������������һ�����͵�ͳ�Ʒ������������FRIEDMAN��[11]��Զ�Ԫ�ع�����е�ά����������������ġ������˼���ǽ���ά����ͨ��ij����ϣ�ͶӰ����ά(1~3ά)�ӿռ��ϣ�Ѱ�ҳ��ܷ�ӳ��ά���ݽṹ��������ͶӰ���ڵ�ά�ռ�����ݽṹ���з������ﵽ�о��ͷ�����ά���ݵ�Ŀ��[12]��ͶӰѰ�ٻع�ģ�͵�ԭ�����¡�
��xΪpά���������y=f(x)��һά���������ͶӰѰ�ٻع�ģ�;��������ɸ��뺯����Ȩ�͵���ʽ���ƽ��ع麯��f(x)������ѧ����ʽΪ
 (1)
(1)
���У�Gm(Zm)Ϊ��m���뺯����Zm=��m��x=��m1x1+��m2x2+��+��mpxp��Ϊ�뺯�����Ա�������ʾpά����x��ͶӰ�����m�ϵ�ͶӰ����mΪ��m��ͶӰ���������� ��MΪ�뺯���ĸ�������mΪ��m���뺯����f(x)����Ȩ��ϵ����
��MΪ�뺯���ĸ�������mΪ��m���뺯����f(x)����Ȩ��ϵ����
ͶӰѰ�ٻع�ģ�͵�ʵ���ǶԲ����IJ���Ѱ�ţ��ؼ���ѡȡͶӰ�����m��Ȩ��ϵ����m���뺯��Gm(Zm)��������ϣ�ʹģ��������С���˼�С����
 (2)
(2)
��ͳ��PPRģ��ʵ�ַ�����ʵ���Dz��÷ֲ�����������ķ��������Ż���Ȼ�������Ż����̼��㸴�ӡ����ʵ���ѶȽϴ�����Ӱ����PPRģ�͵��ƹ�Ӧ�á��������о��������Ŵ��㷨[13]��PPRģ�͵IJ��������Ż������Ŵ��㷨���ڶԳ�ʼ��Ⱥ��ѡ����һ�������ԡ������ٶ�����δ�صõ����Ž�����⡣Ϊ�ˣ����IJ��������ٶȿ졢���������ٵ�����Ⱥ�Ż��㷨��PPRģ�͵IJ��������Ż���
2 ����Ⱥ�Ż��㷨
����Ⱥ�Ż�(particle swarm optimization��PSO)�㷨����KENNEDY��[14-15]�������һ�ֽ������㼼����Դ�ڶ���Ⱥ��ʳ��Ϊ���о�������Dά�����ռ��У�����M�����ӹ��ɵ�����Ⱥ�壬PSO�Ż��㷨�����ٶ�-λ������ģ�ͣ���i�����ӵĿռ�λ��xi=(xi1��xi2������xiD)��i=1��2������M��ʾ��ռ��1�����н⣬��������Ż�Ŀ�꺯��������Ӧ����Ӧ�Ⱥ���ֵ������xi����i�����ӵ��ٶ�vi=(vi1��vi2������viD)���������������ռ䵥λ����������λ�ơ�����ͨ����̬���ٸ������λ��Pi=(pi1��pi2������piD)��ȫ�����λ��Pg=(pg1��pg2������pgD)�������������ٶȺ�λ�ã����¹�ʽ���£�
 (3)
(3)
 (4)
(4)
ʽ�У���Ϊ����Ȩ��ϵ����r1��r2Ϊ��[0��1]֮��仯���������c1��c2Ϊ�������ӡ�
3 ����PSO-PPR�Ľ�ͨ��Ԥ�⽨ģ
ͶӰѰ�ٻع�ģ���Ƿ����ʹ��������ԡ�����̬��ά���ݵ�һ����Ч��ͳ�Ʒ���[16]�����ڴ�ͳ�Ż������ľ����ԣ����IJ�������Ⱥ�㷨�Ż�ͶӰѰ�ٻع�ģ�ͽ��ж�ʱ��ͨ��Ԥ�⡣����PSO-PPR�Ľ�ͨ��Ԥ�⽨ģ�������¡�
Step 1 ȷ��Ԥ��Ӱ�����ӡ��ۺϿ��Ƕ�ʱ��ͨ�����ݵ�ʱ������ԣ����û�ɫ�����ȷ�������ȷ��Ԥ��Ӱ������xij(i=1��2������m��j=1��2������n)��m��n�ֱ��ʾ����������Ԥ��Ӱ�����Ӹ�����Ϊ������ͬ���ٵ�Ӱ�죬��xij���й�һ��������
 (5)
(5)
���У�maxxij��minxij�ֱ��ʾ��j��Ӱ�����ӵ����ֵ����Сֵ��
Step 2 ����ͶӰ����ͶӰ����Ϊ��j(j=1��2������n)����ɵõ�һάͶӰֵzi��
 (6)
(6)
Step 3 ����ͶӰָ�꺯�������ۺ�ͶӰʱ��Ҫ��ͶӰֵziӦ�����ܴ����ȡxij�еı�����Ϣ����Ҫ��zi�ı���Sz�����ܴ�ͬʱҪ��zi��Ԥ��Ŀ��ֵyi�����ϵ������ֵ|Rzy|�����ܴ������õ���ͶӰֵ�Ϳ��Ծ����ܶ��Я��Ԥ��Ӱ������xij�ı�����Ϣ�������ܹ���֤ͶӰֵ��Ԥ��Ŀ��yi���нϺõĽ��� ��[17]����ˣ�ͶӰָ�꺯���ɹ���Ϊ
 (7)
(7)
���У�|��|��ʾȡ����ֵ��SzΪͶӰֵzi�ı��RzyΪzi��yi�����ϵ����
 (8)
(8)
 (9)
(9)
ʽ�У� ��
�� �ֱ�Ϊzi��yi�ľ�ֵ��
�ֱ�Ϊzi��yi�ľ�ֵ��
Step 4 �Ż�ͶӰָ�꺯������Ԥ��Ŀ���Ԥ��Ӱ�����ӵ���������ȷ��ʱ��ͶӰָ�꺯��Q(��)ֻ��ͶӰ������ı仯���仯����ͬ��ͶӰ����ӳ��ͬ�����ݽṹ���������ͶӰ������������ܵر�¶��ά����ij�������ṹ��ͶӰ����ͨ�����ͶӰָ�꺯������������������ͶӰ����
 (10)
(10)
�����Ԧ�j(j=1��2������n)Ϊ�����ĸ����Ż����⣬���淽�����������ѡ����IJ�������Ⱥ�Ż��㷨�����Ż������岽�����¡�
1) ��ʼ������Ⱥ�Ż��㷨�IJ������������Ӹ���������ά���������������������ӡ�����Ȩ��ϵ���ȡ�
2) ��ͶӰָ�꺯����Ϊ��Ӧ�Ⱥ�������ÿ�����ӵ���Ӧ�ȣ�����������������ʷ���λ����Ӧ�Ƚ��бȽϣ�����ǰλ�õ���Ӧ��������ʷ��Ӧ�ȣ���ǰλ��ȡ��������ʷ���λ�á�
3) �ж�����Ⱥ��ȫ�����λ�á����������ӵĸ������λ����Ӧ����Ⱥ���ȫ�����λ����Ӧ����Ƚϣ�������Ⱥ���ȫ����Ӧ�ȣ�����λ��ȡ��ȫ�����λ�á�
4) �ж���ֹ����������������ֹ��������ʽ(3)��ʽ(4)�������ӵ��ٶȺ�λ�ã���������õ����� �Ž⡣
Step 5 ��ʱ��ͨ��Ԥ�⡣��ͨ������Ⱥ�Ż���õ����ͶӰ�������ʽ(6)�õ�ѵ���������ݵ�ͶӰֵ������Ԥ��Ŀ��ֵ������Ӧѵ��������ͶӰֵ�����Dz���ͶӰѰ�ٻع�Ԥ��ģ�͡��������������й�һ����������������Ӧ��ͶӰֵ�����õõ���Ԥ��ģ�ͽ��ж�ʱ��ͨ��Ԥ�⡣
4 ʵ����֤
4.1 ������Դ
ʵ��������Դ���Ϻ����ϱ��ܳ�Լ10 km����·�ϸ�Ӧ��Ȧ������ɼ����Ľ�ͨ�����ݡ���·��������24�����������30���ѵ������棬�ֱ�װ��88�����������60���ѵ��������ʵ������Ϊ2008-09��2008-10������5����һ��24 h��Ӧ��Ȧ���ݣ�ԭʼ���ݲ������Ϊ20 s������20 s��������Ľ�ͨ�����ݲ����Խϴ���Ӧ���ڶ�ʱ��ͨ��Ԥ�⣬���ķֱ���ϳ�Ϊ1��2��5 min���ݽ���Ԥ�������
4.2 Ԥ��Ӱ������ȷ��
Ԥ��Ӱ��������Ԥ��Ŀ��֮�����ȷ�е���ع�ϵ�DZ�֤��ͨ��Ԥ�⾫�ȵ�ǰ�ᡣ��ˣ������ۺϿ��Ƕ�ʱ��ͨ�����ݵ�ʱ������ԣ�ѡȡ��Ԥ�⽻ͨ���������ڵ�ʱ��Ϳռ�������Ϊ��ѡӰ�����ӣ������û�ɫ�����ȷ���ȷ�����յ�Ԥ��Ӱ�����ӡ��Զ�������NBDX16(2)��Ӧ��Ȧ�����2008-09-22�ɼ�����5 min������ΪԤ��Ŀ�����ݽ��з���������NBDX��ʾ�ϱ��ܶ������ߣ�16��ʾ�������ţ��ڱ�ʾ������š���ɫ�����ȷ���������1��ʾ��
�ɱ�1�ɼ�����ѡӰ��������Ԥ��Ŀ��Ĺ����Ⱦ���0.9���ϣ�˵����ѡӰ��������Ԥ��Ŀ��֮����ڽ�ǿ������ԣ��ܹ���Ч��֤��ͨ��Ԥ��ľ��ȡ���ˣ�����ѡȡ����8����ѡӰ��������Ϊ��ͨ��Ԥ��Ӱ�����ӡ�
��1 Ԥ��Ӱ�����ӻ�ɫ�����ȷ���
Table 1 Grey relational analysis of forecasting impact factors

4.3 ʵ��������
Ϊ���������ķ����ڶ�ʱ��ͨ��Ԥ���ϵ�ʵ��Ӧ��Ч��������������NBDX16�ڸ�Ӧ��Ȧ������ɼ�����ԭʼ���ݷֱ�ϳ�Ϊ1��2��5 min���ݽ���Ԥ�������ѡȡ2008-09-01�ɼ��Ľ�ͨ��������Ϊ�����������Ԥ��ģ�ͣ���2008-09-08�Ľ�ͨ��������Ϊ����������ģ�͵�Ԥ�����ܽ�������������1 440��1 min��ͨ�����ݣ�720��2 min��ͨ�����ݺ�288��5 min��ͨ�����ݡ����У�����Ⱥ�Ż��㷨�ľ�������������£�������Ϊ100��������ά��Ϊ8����������c1=c2=2������Ȩ��ϵ����0.9������������Լ�С��0.4����������Ϊ100�Ρ�ͨ������Ⱥ�Ż��õ���ͶӰ�����=(��1����2����3����4����5����6����7����8)���2��ʾ��
Ϊֱ��չ�ֱ��ķ����Ķ�ʱ��ͨ��Ԥ��Ч����ͼ1~3��ʾ�ֱ�Ϊ1��2��5 min��ͨ�����ݵ�Ԥ������
��ͼ1~3�ɼ������ķ����õ���Ԥ��ֵ��ʵ��ֵ֮�����Ч���Ϻã�˵�����ķ�����3�ֲ�ͬʱ��߶ȵĽ�ͨ�����ݾ����нϺõ�Ԥ��Ч�����Ա�3�ֲ�ͬʱ��߶Ƚ�ͨ�����ݵ�Ԥ��Ч���ɼ���5 min��ͨ�����ݵ�Ԥ��Ч����ã�2 min��ͨ�����ݵ�Ԥ��Ч����֮������1 min��ͨ�����ݵIJ����Խϴ�����������Ԥ��ֵ��ʵ��ֵ֮������Դ������ܹ������ʱ��ͨ��Ԥ�������
Ϊ�˶Աȷ������ķ����ڶ�ʱ��ͨ��Ԥ���ϵ���Խ�ԣ�ѡȡ���г������ۺͽϺ�Ԥ��Ч�����Իع��ƶ�ƽ��ģ��(autoregressive integrated moving average model��ARIMA)��BP������ģ��(back propagation neural network model��BPNN)��Ϊ�Աȷ�����������ƽ�����ٷ����;���ϵ��2��ָ��������ۡ�
 (11)
(11)
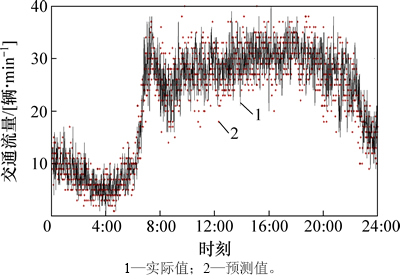
ͼ1 1 min��ͨ������Ԥ����
Fig. 1 Prediction results of 1 min traffic flow data
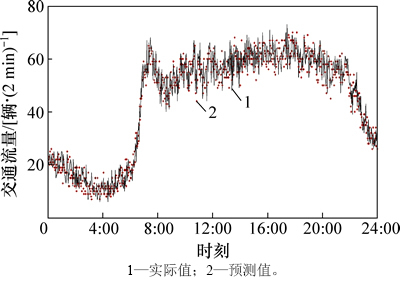
ͼ2 2 min��ͨ������Ԥ����
Fig. 2 Prediction results of 2 min traffic flow data
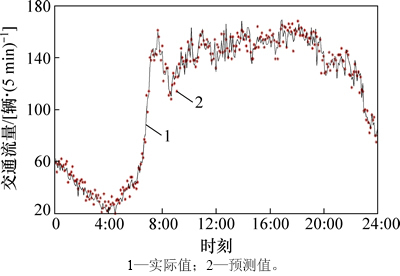
ͼ3 5 min��ͨ������Ԥ����
Fig. 3 Prediction results of 5 min traffic flow data
��2 ͶӰ������
Table 2 Results of projection direction

��3 3��ģ�͵�Ԥ��Ч���Ա�
Table 3 Prediction performance comparison of three models

 (12)
(12)
���У�eMAPEΪƽ�����ٷ���CEΪ����ϵ����yi��ʾiʱ�̵�ʵ��ֵ�� ��ʾiʱ�̵�Ԥ��ֵ��nΪ������������ϵ����ʾԤ��ֵ��ʵ��ֵ֮���ݻ����Ƶ����ƶȣ�����ϵ��Խ��˵��Ԥ��ֵ��ʵ��ֵ֮����϶�Խ�ߡ�
��ʾiʱ�̵�Ԥ��ֵ��nΪ������������ϵ����ʾԤ��ֵ��ʵ��ֵ֮���ݻ����Ƶ����ƶȣ�����ϵ��Խ��˵��Ԥ��ֵ��ʵ��ֵ֮����϶�Խ�ߡ�
��3��ʾΪ3�ַ����Բ�ͬʱ��߶Ƚ�ͨ�����ݵ�Ԥ�����Աȡ��ɱ�3���Կ�������ͬԤ��ģ�͵�Ԥ��Ч���������ԵIJ��죬������������PSO-PPRģ�Ͷ���3�ֲ�ͬʱ��߶Ƚ�ͨ�����ݵ�Ԥ��Ч�������ڶԱȷ�������ƽ�����ٷ����棬��ƽ��Ԥ�⾫�Ƚ�ARIMAģ�������37.8%����BPNNģ�������27.2%���ھ���ϵ�����棬���ķ��������Ч��ͬ����������2�ֶԱȷ���������ͬһԤ��ģ�͵IJ�ͬʱ��߶Ƚ�ͨ�����ݣ�ʱ��߶�Խ��Ԥ��Ч��Խ�ã�������Ϊ����ʱ��߶ȵ�����ͨ�����ݵIJ����Լ�С����������ƽ����Ԥ��ģ���ܹ����õظ��ٽ�ͨ�����ݵķ�չ���ơ�
5 ����
1) �ۺϿ��Ƕ�ʱ��ͨ�����ݵ�ʱ������ԣ����û�ɫ�����ȷ�������ȷ���˽�ͨ��Ԥ��Ӱ�����ӣ�����ر�֤��ģ���������ݵ���Ч�ԡ�
2) ��������Ӧ�ڶ�ʱ��ͨ��Ԥ���ͶӰѰ�ٻع�ģ�ͣ�����������Ⱥ�Ż��㷨�Ż�ͶӰָ�꺯����
3) ���Ϻ����ϱ��ܿ���·ij·��Ϊʵ����ֱ�ʵ�⽻ͨ�����ݺϳ�Ϊ1��2��5 min���ݽ���ʵ����֤�ͶԱȷ�������֤�˱��ķ�������Ч�Ժ���Խ�ԡ�
�ο����ף�
[1] VOORT M, DOUGHERTY M, WATSON S. Combining kohonen maps with ARIMA time series models to forecast traffic flow[J]. Transportation Research Part C: Emerging Technologies, 1996, 4(5): 307-318.
[2] WILLIAMS B M, HOEL L A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: theoretical basis and empirical results[J]. Journal of Transportation Engineering, 2003, 129(6): 664-672.
[3] ������, ��־, ���׳�. ����Լ���������˲��Ķ�ʱ��ͨ�������Ԥ��ģ��[J]. ��ͨ���乤��ѧ��, 2008, 8(5): 86-90.
NIE Peilin, YU Zhi, HE Zhaocheng. Constrained Kalman filter combined predictor for short-term traffic flow[J]. Journal of Traffic and Transportation Engineering, 2008, 8(5): 86-90.
[4] �ڱ�, ��ɺ��, ������, ��. K���ڶ�ʱ��ͨ��Ԥ��ģ��[J]. ��ͨ���乤��ѧ��, 2012, 12(2): 105-110.
YU Bin, WU Shanhua, WANG Minghua, et al. K-nearest neighbor model of short-term traffic flow forecast[J]. Journal of Traffic and Transportation Engineering, 2012, 12(2): 105-110.
[5] DAVIS G A, NIHAN N L. Nonparametric regression and short term freeway traffic forecasting[J]. Journal of Transportation Engineering, 1991, 117(2): 178-188.
[6] ������, �ִ���, �, ��. ���ں�����֯ӳ��-ǰ��������Ľ�ͨ����ʱԤ��[J]. ���ִ�ѧѧ��(��ѧ��), 2011, 41(4): 938-943.
GONG Bowen, LIN Ciyun, LI Jing. Short-term traffic flow prediction based on KSOM-BP neural network[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(4): 938-943.
[7] ����, ����ģ, ������, ��. ������������֯������Ⱥ�Ľ�ͨ��Ԥ��[J]. ��ͨ����ϵͳ��������Ϣ, 2013, 13(3): 33-39.
L Jin, ZHAO Xiangmo, FAN Haiwei, et al. Traffic flow forecasting based on growing self-organized neural network group[J]. Journal of Transportation Systems Engineering and Information Technology, 2013, 13(3): 33-39.
Jin, ZHAO Xiangmo, FAN Haiwei, et al. Traffic flow forecasting based on growing self-organized neural network group[J]. Journal of Transportation Systems Engineering and Information Technology, 2013, 13(3): 33-39.
[8] VLAHOGIANNI E I, KARLAFTIS M G, GOLIAS J C. Spatio-temporal short-term urban traffic volume forecasting using genetically optimized modular networks[J]. Computer-Aided Civil and Infrastructure Engineering, 2007, 22(5): 317-325.
[9] ����, ����ǿ, �ַ�, ��. ����֧���������ع�Ķ�ʱ��ͨ��Ԥ��ģ��[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2013, 41(9): 71-76.
FU Gui, HAN Guoqiang, LU Feng. Short-term traffic flow forecasting model based on support vector machine regression[J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(9): 71-76.
[10] WANG J, SHI Q X. Short-term traffic speed forecasting hybrid model based on chaos-wavelet analysis-support vector machine theory[J]. Transportation Research Part C: Emerging Technology, 2013, 27: 219-232.
[11] FRIEDMAN J H, STUETZLE W. Projection pursuit regression[J]. Journal of the American Statistical Association, 1981, 76: 817-823.
[12] ����Ӿ, ������, �����, ��. �����Ż��㷨�ĺ�����Ӫ����ͶӰѰ�ٻع�Ԥ��ģ��[J]. �Ĵ���ѧѧ��(���̿�ѧ��), 2007, 39(2): 1-8.
LI Zuoyong, WANG Jiayang, JIN Xiangcan, et al. Evolution algorithm based forecasting model for lake eutrophication using PPR[J]. Journal of Sichuan University (Engineering Science Edition), 2007, 39(2): 1-8.
[13] ������. ����ͶӰѰ�ٺ��Ŵ��㷨��һ�ַ�����ϵͳ��ģ����[J]. ϵͳ����������ʵ��, 2005(4): 22-28.
LI Shiling. A nonlinear system modeling method based on projection pursuit and genetic algorithm[J]. System Engineering theory and Practice, 2005(4): 22-28.
[14] KENNEDY J, EBERHART R C. Particle swarm optimization[C]//Proceedings of the 4th IEEE International Conference on Neural Network, Piscataway: IEEE Service Center, 1995: 1942-1948.
[15] EBERHART R C, KENNEDY J. A new optimizer using particle swarm theory[C]//Proceedings of the 6th International Symposium on Micro Machine and Human Science. Piscataway: IEEE Service Center, 1995: 39-43.
[16] ���, ������. �ұ�Ԥ�������Ⱥ�Ż�ͶӰѰ��ģ��[J]. ��������ѧ��, 2010, 32(5): 718-723.
XU Fei, XU Weiya. Projection pursuit model based on particle swarm optimization for rock burst prediction[J]. Chinese Journal of Geotechnical Engineering, 2010, 32(5): 718-723.
[17] ��ǿ, ��С��. ͶӰѰ��ģ��ԭ������Ӧ��[M]. ����: ��ѧ������, 2006: 144-145.
FU Qiang, ZHAO Xiaoyong. Principle and application of projection pursuit[M]. Beijing: Science Press, 2006: 144-145.
(�༭ �Կ�)
�ո����ڣ�2015-11-05�������ڣ�2016-02-03
������Ŀ(Foundation item)�����Ҹ����о���չ�ƻ���Ŀ(2012AA112307)�����ҿƼ�֧�żƻ���Ŀ(2014BAG03B03)��������Ȼ��ѧ����������Ŀ(51308248, 51408257)������ʡ�Ƽ���չ�ƻ�������л���������Ŀ(20140520134JH)(Project(2012AA112307) supported by the National High Technology Research and Development Program of China; Project(2014BAG03B03) supported by the National Science and Technology Pillar Program; Projects(51308248, 51408257) supported by the National Natural Science Foundation of China; Project(20140520134JH) supported by Jilin Province Science and Technology Development Plan of Youth Research Fund)
ͨ�����ߣ������ģ���ʿ����ʦ���������ܽ�ͨϵͳ�о���E-mail��gongbowen@jlu.edu.cn

