脉动流场中血管微型机器人的运行研究
梁亮1, 2,彭辉1,陈柏3
(1. 中南大学 信息科学与工程学院,湖南 长沙,410083;
2. 长沙学院 机电工程系,湖南 长沙,410003;
3. 南京航空航天大学 江苏省精密与微细制造技术重点实验室,江苏 南京,210016)
摘要:研究一种应用于人体血管的新型螺旋式微型机器人。利用机器人机体内外表面不同旋向的螺旋槽和在液体环境中不同转向的高速旋转,实现机器人的悬浮式快速运行。在模拟人体主动脉的脉动流场环境下,运用计算流体力学(CFD)方法数值研究螺旋机器人在一定的运行速度下,机器人内外螺旋的轴向驱动力、轴向力矩以及机器人对血管壁的压力,并且分析机体的内外转速和机器人运行速度对机器人轴向驱动力和血管壁所受压力的影响。研究结果表明:血管壁所受最大压力和机器人内外螺旋轴向驱动力变化基本和血流速度变化趋势一致,机体外螺旋所受轴向力矩为负值,机体内螺旋所受轴向力矩为正值;随着机体内外转速的增加,血管壁所受最大压力和机器人的轴向驱动力都随之增大,机体外螺旋转速的增加更有利于机器人轴向驱动力的增大;随着机器人运行速度的增大,机器人轴向驱动力先增大,当运行速度达到一定值时,机器人轴向驱动力又随之减小。实验证明这种螺旋机器人可以在顺流和逆流的流体环境中运行。
关键词:血管机器人;脉动流;螺旋;内窥镜;计算流体力学(CFD)
中图分类号:TP242.2 文献标志码:A 文章编号:1672-7207(2011)12-3784-07
Moving vascular micro-robot in pulsating flow field
LIANG Liang1, 2, PENG Hui1, CHEN Bai3
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. Department of Mechanical & Electrical Engineering, Changsha University, Changsha 410003, China;
3. Jiangsu Province Key Laboratory of Precision and Mico-Manufacturing Technology,
Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
Abstract: A new kind of spiral micro-robot which was applied in the blood vessel of people was proposed. According to the different handed inner and outer screws of the robotic body and their different directional high speed rotating in the liquid, the robot could be suspended to move quickly. Simulating the pulsating flow filed of the aorta, the driving forces of the inner and outer screws of the robotic body, the axial moment and the impact pressure of the blood vessel wall were numerically calculated with computational fluid dynamics method at the robotic constant running speed. The influences of robotic inner and outer rotational speeds and robotic running speed on the driving force of the robot and the impact pressure of the blood vessel wall were analyzed. The results show that the change trends of the driving force of the inner and outer screw of the robotic body and the impact pressure of the blood vessel wall are basically consistent with those of the blood flows, and the axial moment of the outer screw of the robotic body has negative value, and the axial moment of the inner screw of the robotic body has positive value. When robotic inner and outer rotational speeds increase, the driving force of the robot and the impact pressure of the blood vessel wall increase. The increase in rotational speed of the outer screw of the robot is favorable to enhance the driving force of the robot comparing to that of the inner screw of the robot. When the robotic running speed increases, the driving force of the robot increases, and then it decreases when the robotic running speed arrives a certain value. Finally, the experimental results verify that this spiral micro-robot can move in the positive and reverse flowing fluid.
Key words: vascular micro-robot; pulsating flow; spiral; endoscope; computational fluid dynamics (CFD)
医用内窥镜手术符合人类追求的少创或无创诊断和治疗。目前,对医用内窥镜手术的研究主要从2方面进行:一是改进传统的医用内窥镜系统,将系统进一步微型化;二是改进医用内窥镜系统进入人体内腔的驱动方式。因此,国内外许多学者研制与开发各种医用微型机器人内窥镜系统。在胃肠道机器人研究方面,Kassim等[1]研制了仿蜥蜴行走的“内窥爬行者”机器人;Cheung等[2]研究出一种蠕动内窥镜机器人;张永顺等[3-4]提出了螺旋式胶囊微型机器人,并进一步研制出可变直径胶囊机器人,适合在胃肠道驱动;马官营等[5]研制了一种模拟蚯蚓爬行的无缆机器人内镜系统;皮喜田等[6]研究了肠道生物机器人系统,并选取黄鳝作为驱动体。在血管机器人研究方面,瑞典科学家研制出了由多层聚合物和黄金制成的能在血液、尿液和细胞介质中捕捉和移动单个细胞的血管内微型机器人[7];日本科学家提出了一种基于外磁场驱动的螺旋式游动机器人[8];陈柏等[9-10]研制了仿蝌蚪与螺旋泳动血管微型机器人和适合在大血管环境蠕动的基于腹足动物运动的仿生介入机器人;杨岑玉等[11]设计了一种可在非磁性细小管路直行和转向的仿趋磁细菌的微型机器人;付宜利等[12]研制了一种用于血管介入手术的导向机器人;田增民等[13]将医用机器人应用于玻璃血管模型和狗血管介入实验。由于人体血管比肠道尺寸更微小,基于血管机器人微型化和无损伤的要求,考虑到双节螺旋医用微型机器人存在体积较大和外壳螺旋槽高速旋转可能造成对人体内腔管壁损伤等问 题[14],本文作者提出一种单节螺旋式血管微型机器人。建立血管内血液流体的动力学控制方程,采用符合人体规律的脉动血流下,当机器人以一定的速度运行时,借助CFD软件数值模拟了机器人机体内外螺旋高速旋转时的血液对机器人内外螺旋的轴向驱动力、轴向力矩以及机器人对血管壁的压力,并且分析了机体的内外转速和机器人运行速度对机器人轴向驱动力和血管壁所受压力的影响。
1 血管微型机器人的驱动机构
图1所示为血管微型机器人在人体血管内的结构图。该机器人包括:机体内螺旋轴,该轴是中空的,且在其内表面上带有左螺旋槽;固接于机体内螺旋轴的线圈;机体外螺旋壳,该壳的外表面带有右螺旋槽;固接于机体外螺旋壳的永磁铁;连通上述各部件的微电池以及连通微电池以体外无线成像和控制的沿圆周布置在机体头部的成像、通讯和控制模块。永磁铁和线圈组成微电机,之间采用滚动(或滑动)轴承支撑。当微电机开始通电时,因机体内轴上固定了微电池等模块,惯性较大,机体外螺旋壳高速旋转,迫使血液产生轴向运动,其反作用力推动机器人运动;同时,由于作用在机体外螺旋壳的血液阻力将迫使机体内螺旋轴反向旋转,内螺旋轴反向旋转也可迫使轴内血液产生轴向运动,其反作用力也作用于机器人。因为机体内外螺旋旋向和转向都相反,所以血液对外螺旋壳和内螺旋轴的反作用力方向都相同,从而实现无论是外壳还是内轴旋转,均可使微型机器人有相同方向的推进力,避免了仅有外螺旋壳的单节螺旋机器人内部电机高速旋转,而机体外壳转速较慢或不转导致驱动力减小的不足。
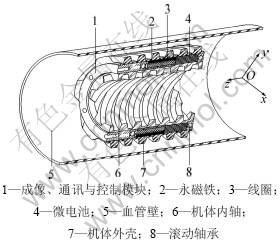
图1 血管微型机器人结构图
Fig.1 Structure diagram of vascular micro-robot
由于机器人螺旋外壳与血管之间血液的动压效应,将形成一层动压润滑黏液膜,使机器人处于悬浮状态,避免机器人与血管壁直接接触,从而达到无损伤驱动的目的。改变机器人微电机的旋转方向可以改变机器人运动的方向。考虑电池容量的局限性,采用机体内放置永磁体,由外部旋转磁场驱动。
2 血液流体的动力学控制方程
要研究机器人内外螺旋同时旋转运行时的轴向驱动力、轴向力矩和血管壁所受压力,也就是要研究血液对机器人的作用力、作用力矩和血液对血管壁的压力,因此首先要建立血液流体的动力学控制方程。引入哈密顿微分算子: 。
。
以血液中的某一微元体为研究对象,可得质量守恒方程:
 (1)
(1)
根据动量守恒,可得方程:
 (2)
(2)
式中:ρ为血液密度;ux,uy,uz分别为速度矢量u在x,y,z方向的分量;p为血液微元体上的压力; ,
, ,
, 为广义源项:
为广义源项: ,
, ,
, ;sx,sy,sz分别为:
;sx,sy,sz分别为:
 (3)
(3)
式中:μ为血液动力黏度;λ为第二黏度,通常取为-2/3;fx,fy,fz为x,y,z方向的单位质量力,因为质量力只有重力,加上重力方向与y轴相反,故fx=0,fy=-g,fz=0。
方程(1)和(2)即为血液的动力学控制方程,是血液流场数值计算的数学模型。
3 数值计算
3.1 脉动血流函数
由于心脏的间歇射血,动脉中的血流具有强烈的脉动特性。假设血管壁为刚性,心脏搏动频率为75次/min,即心脏搏动周期为0.8 s,其中心缩期占0.3 s,心舒期占0.5 s。主动脉计算进口平均速度曲线,如图2所示,表达式为[15]:
 (4)
(4)
式中:Vinlet为主动脉计算进口平均速度,m/s;t为时间,s。

图2 主动脉计算进口平均血流速度曲线
Fig.2 Computed average blood flow velocity curve of aorta
3.2 机器人内外螺旋轴向驱动力、轴向力矩和血管壁压力数值仿真
在三维数值计算中,根据人体主动脉实际的尺寸和血管内液体环境,假定机器人与血管中充满血液,血液密度为1 053.1 kg/m3,动力黏度为4.513 5 mPa・s,并假定主动脉直径为11 mm,长度为75 mm;机器人外壳右螺旋槽的外径为8 mm,轴向长度为15 mm,螺纹线数为6,导程15 mm,螺旋槽为矩形,槽面宽为1 mm,槽底宽为1.5 mm,槽深为0.8 mm;机体内轴左螺旋槽的内径为2.8 mm,轴向长度为15 mm,螺纹线数为6,导程15 mm,螺旋槽为矩形,槽面宽为1 mm,槽底宽为0.8 mm,槽深为0.6 mm。
利用Fluent6.3计算流体动力学软件对机器人、血管及血液组成的系统进行三维数值模拟。设置机器人内轴空心区域流体、机器人外壳邻近区域流体和剩下区域流体为3个流体区域。网格划分采用了非结构化四面体网格,机器人内外区域采用加密的计算网格。数值分析采用雷诺平均的NS方程作为控制方程,湍流模型为标准k-ε模型,近壁处流动采用标准壁面函数处理,压力和速度耦合方程采用标准SIMPLE算法求解。为了模拟机器人内轴空心区域流体和外壳邻近区域流体的运动,采用滑移网格方法进行处理,给定外壳邻近区域流体转速为1 000 r/min(正转)和内轴空心区域流体转速为-200 r/min(反转)。解算收敛条件为:连续性,x,y,z方向速度,k,ε均为0.001。在数值计算中,采用了动网格技术,并假定机器人以速度为20 mm/s沿着血管中心轴z轴正方向作直线运动。非稳态数值计算中,按照血流进口速度方程(4)分为3个阶段,每步迭代时间与迭代步数乘积等于每个阶段时间,并且在每个阶段重新设置进口和出口边界,以符合血液正向流动、反向流动和不流动3种情况。
图3所示为一个脉动周期内,机器人在脉动流场中机器人机体内外螺旋所受轴向驱动力曲线。从图3可以看出:在脉动流场中,当机器人运行方向与血液流动方向相同时,机体所受的轴向驱动力增大,即加速运动,而当机器人运动方向与血液流动方向相反时,机体所受轴向驱动力的方向发生改变,并且增大,即减速运动,当血液流动速度为0 m/s时,高速旋转的机体同样存在轴向驱动力。从总体来看,机器人所受轴向驱动力变化趋势和血流速度变化趋势基本一致。很明显,机体外螺旋轴向驱动力远大于内螺旋轴向驱动力,因此,在不损伤内腔壁的前提,要增大机器人速度,应该首先提高机体外螺旋的转速。

图3 一个脉动周期内机器人机体内外螺旋轴向驱动力曲线
Fig.3 Axial driving force curves of inner and outer screw of robotic body in a pulsation cycle
图4所示为一个脉动周期范围内,机器人在脉动流场中机器人机体内外螺旋所受轴向力矩曲线。从图4可以看出:在脉动流场中,血流方向为z轴正向时,机体外螺旋所受轴向力矩为负值,机体内螺旋所受轴向力矩为正值,并且外螺旋所受轴向力矩远大于内螺旋力矩。当血流方向为z轴反向或静止时,机体内螺旋轴向力矩很小,接近于0 N・m,而机体外螺旋轴向力矩也不大,且为负值。以上说明,在机器人运行的过程中,机器人受到血液作用的轴向力矩为负值,阻碍机体旋转的。图5所示为一个脉动周期内,血管壁所受压力曲线。从图5可以看出:在脉动流场中,血管壁所受压力变化趋势大体上和血流速度变化趋势相似。整个周期范围内,血管壁压力最大值出现在t=0.06 s时刻,此时压力为3.869 MPa,位置处在血流进口附近;血管壁所受最小压力出现在t=0.24 s,即血流正向流动与反向流动的交接点时刻,血管壁承受最大负压为422.3 Pa;而在血流静止时刻,血管壁所受压力不大,且基本保持不变。

图4 一个脉动周期内机器人机体内外螺旋轴向力矩曲线
Fig.4 Axial driving moment curves of inner and outer screw of robotic body in a pulsation cycle

图5 一个脉动周期内血管壁所受压力曲线
Fig.5 Impact pressure curves of blood vessel wall in a pulsation cycle
3.3 机体内外螺旋转速对机器人轴向驱动力和血管壁压力的影响
机体内外螺旋转速的变化对机器人运行的影响不同,初设机体外螺旋转速为1 000 r/min,机体内螺旋转速为-200 r/min,图6~9所示为机体内外螺旋转速在血流速度为0(t=0 s)和最大(t=0.08 s)时对机器人轴向驱动力和血管壁压力的影响。

图6 机器人轴向驱动力与机体内外转速的关系(t=0 s)
Fig.6 Relationship between robotic axial driving force and robotic inner and outer rotational speeds (t=0 s)

图7 血管壁最大压力与机体内外转速的关系(t=0 s)
Fig.7 Relationship between maximal pressure of blood vessel wall and robotic inner and outer rotational speeds (t=0 s)

图8 机器人轴向驱动力与机体内外转速的关系(t=0.08 s)
Fig.8 Relationship between robotic axial driving force and robotic inner and outer rotational speeds (t=0.08 s)

图9 血管壁最大压力与机体内外转速的关系(t=0.08 s)
Fig.9 Relationship between maximal pressure of blood vessel wall and robotic inner and outer rotational speeds (t=0.08 s)
从图6~9可以看出:随着机体内外转速的增大,机器人轴向驱动力和血管壁所受的最大压力都增大,但增大机体外螺旋转速时驱动力和压力均增大的更快,说明要提高机器人的轴向驱动力,应该优先增大机体外螺旋的转速。血液中运行的机器人轴向驱动力和血管壁所受最大压力在脉动流场峰值时比非脉动流场时大得多,说明正向脉动流场有利于机器人的运行,但会增大血管壁承受的压力。
3.4 机器人运行速度对机器人轴向驱动力和血管壁压力的影响
图10和图11所示为机器人在脉动和静止流场(t=0.08 s)下,机器人轴向驱动力和血管壁所受压力随机器人运行速度变化的曲线。可以看出:随着运行速度的增大,机器人轴向驱动力先增大后减小,而血管壁所受的最大压力变化不大,并且脉动流场的机器人所受轴向驱动力和血管壁所受压力都远远大于静止流场的机器人所受驱动力和压力。这说明,在脉动流场中,机器人是加速运行的,而在静止流场中,随着机器人运行速度的增大,轴向驱动力会减小,当达到一定运行速度时,轴向驱动力为0 N,机器人以匀速 运行。

图10 机器人轴向驱动力与运行速度的关系(t=0.08 s)
Fig.10 Relationship between robotic axial driving force and robotic running speed (t=0.08 s)
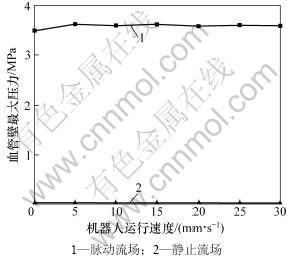
图11 血管壁最大压力与机器人运行速度的关系(t=0.08 s)
Fig.11 Relationship between maximum pressure of blood vessel wall and robotic running speed (t=0.08 s)
3.5 血管机器人的运行实验
为验证螺旋式血管机器人在人体动脉环境中运行的可行性,制作了10 mm×25 mm(直径×长度)的内外螺旋机器人实验样机,如图12所示。利用心脏外科手术中所用人工血泵,模拟动脉环境中血液的流动(动脉中的血流速度如式(4)所示),并利用20 mm×100 mm(直径×长度)的透明橡胶软管模拟人体主动脉弓,观察研究机器人运动状态。
在实验中观察发现:机器人在流体冲击下既能顺流前进,又能逆流前进;流体冲击会使机器人在运动过程中产生一定的倾角。当机体外螺旋转速为800 r/min、内螺旋转速为-200 r/min、环境液体黏度为0.1 Pa・s、环境液体为静态时,机器人通过软管的平均运动速度约为2.5 mm/s。当透明软管中的液体流速为0.8 m/s时,机器人顺流运动的平均速度约为3.2 mm/s,逆流运动的平均速度约为1.7 mm/s。在流体冲击下,机器人的运动是可控的。

图12 螺旋机器人实验样机
Fig.12 Experimental prototype of spiral micro-robot
4 结论
(1) 研究一种内外螺旋、体积微小的新型螺旋微型机器人,它可以在人体肠道、尿道、大动脉等细小管道实现悬浮式无损伤运行。
(2) 当高速旋转的螺旋微型机器人以一定速度运行时,在一个血流脉动周期内,血管壁所受压力变化趋势大体上和血流速度变化趋势相似,机器人的机体内外螺旋轴向驱动力大小和方向的变化与血流速度大小和方向的变化相同,机体外螺旋所受轴向力矩为负值,机体内螺旋所受轴向力矩为正值;血流静止时,血管壁所受压力和机器人轴向驱动力和力矩较小,基本保持不变。
(3) 随着机体内外转速的增加,血管壁所受最大压力和机器人的轴向驱动力都随之增大,在不损伤血管壁的前提下,机体外螺旋转速的增加更有利于机器人轴向驱动力的增大。
(4) 随着机器人运行速度的增大,血管壁所受最大压力变化不大,机器人轴向驱动力先增大,当运行速度达到一定值时,机器人轴向驱动力又随之减小。
(5) 螺旋式血管机器人在模拟血管环境中运行,在流体脉动冲击下,机器人既能顺流前进,又能逆流前进;流体冲击会使机器人运动过程中产生一定的倾角;流体冲击对机器人运动速度会产生影响,但影响幅度在可控范围内。
参考文献:
[1] Kassim I, Phee L, Wan S, et al. Locomotion techniques for robotic colonoscopy[J]. IEEE Engineering in Medicine and Biology Magazine, 2006, 25(3): 49-56.
[2] Cheung E, Karagozler M E, Park S, et a1. A new endoscopic microcapsule robot using beetle inspired microfibrillar adhesives[C]//Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Monterey, 2005: 551-557.
[3] 张永顺, 于宏海, 阮晓燕, 等. 新型肠道胶囊式微型机器人的运动特性[J]. 机械工程学报, 2009, 45(8): 18-23.
ZHANG Yong-shun, YU Hong-hai, RUAN Xiao-yan, et al. Kinematics characteristics of a new capsule-type micro robot in intestine[J]. Chinese Journal of Mechanical Engineering, 2009, 45(8): 18-23.
[4] 张永顺, 姜生元, 张学文, 等. 肠道内可变直径胶囊机器人的动态特性[J]. 科学通报, 2009, 54(16): 2408-2415.
ZHANG Yong-shun, JIANG Sheng-yuan, ZHANG Xue-wen, et al. Dynamic characteristics of an intestine capsule robot with variable diameter[J]. Chinese Sci Bull, 2009, 54(16): 2408-2415.
[5] 马官营, 颜国正, 王坤东, 等. 无线供能胃肠道微型诊查机器人系统研究[J]. 机器人, 2008, 30(1): 56-62.
MA Guan-ying, YAN Guo-zheng, WANG Kun-dong, et al. Study on wireless powered microrobot for gastrointestinal detection[J]. Robot, 2008, 30(1): 56-62.
[6] 皮喜田, 王振宇, 魏亢, 等. 肠道生物机器人系统的初步研究[J]. 传感器与微系统, 2010, 29(10): 79-82.
PI Xi-tian, WANG Zhen-yu, WEI Kang, et al. A preliminary study on the intestinal bio-robot system[J]. Transducer and Microsystem Technologies, 2010, 29(10): 79-82.
[7] Jager E W, Inganas O, Lundstrom I. Microrobots for micrometer-size objects in aqueous media: Potential tools for single-cell manipulation[J]. Science, 2000, 288(5475): 2335-2338.
[8] Ishiyama K, Sendoh M, Yamazaki A, et al. Swimming of magnetic micro-machines under a very wide-range of Reynolds number conditions[J]. IEEE Transactions on Magnetics, 2001, 37(4): 2868-2870.
[9] 陈柏, 顾大强, 潘双夏, 等. 仿蝌蚪与螺旋的泳动机器人系统的设计[J]. 机械工程学报, 2005, 41(10): 88-92.
CHEN Bai, GU Da-qiang, PAN Shuang-xia. Design of a tadpole-like swimming robot with spiral-type head[J]. Chinese Joural of Mechanical Engineering, 2005, 41(10): 88-92.
[10] 陈柏, 陈笋, 蒋素荣, 等. 仿生介入机器人的运动性能[J]. 机器人, 2010, 32(3): 414-418.
CHEN Bai, CHEN Sun, JIANG Su-rong, et al. Motion performances of a bionic interventional micro robot[J]. Robot, 2010, 32(3): 414-418.
[11] 杨岑玉, 王铮, 王金光, 等. 仿趋磁细菌的微型机器人研究[J]. 机器人, 2009, 31(2): 146-150.
YANG Cen-yu, WANG Zheng, WANG Jin-guang, et al. On a new type of magnetotactic bacterium-like mciro-robot[J]. Robot, 2009, 31(2): 146-150.
[12] 付宜利, 李显凌, 梁兆光. 基于形状记忆合金的自主导管导向机器人设计[J]. 机械工程学报, 2008, 44(9): 76-82.
FU Yi-li, LI Xian-ling, LIANG Zhao-guang. Design of guiding robot for active catheter based on shape memory alloy[J]. Chinese Journal of Mechanical Engineering, 2008, 44(9): 76-82.
[13] 田增民, 徐武夷, 卢旺盛, 等. 医用机器人在血管介入治疗中应用的实验研究[J]. 国际脑血管杂志, 2010, 18(5): 338-341.
TIAN Zeng-min, XU Wu-yi, LU Wang-sheng, et al. Application of medical robot in vascular intervention: An experimental study[J]. Int J Cerebrovasc Dis, 2010, 18(5): 338-341.
[14] 穆晓枫,周银生,陈柏. 一种医用肠道机器人的理论分析与试验研究[J]. 机械工程学报, 2004, 40(7): 124-127.
MU Xiao-feng, ZHOU Yin-sheng, CHEN Bai. Theoretical analysis and experimental research on a medical micro-robot[J]. Chinese Journal of Mechanical Engineering, 2004, 40(7): 124-127.
[15] 邱霖. 分岔动脉血管介入治疗的数值模拟和实验研究[D]. 成都: 四川大学建筑与环境学院, 2004: 10-30.
QIU Lin. Numerical simulation and experimental study for vascular interventional treatment by bifurcated artery[D]. Chengdu: Sichuan University. College of Architecture and Environment, 2004: 10-30.
(编辑 赵俊)
收稿日期:2011-04-06;修回日期:2011-07-10
基金项目:国家自然科学基金资助项目(51075209)
通信作者:彭辉(1963-),男,湖南长沙人,教授,从事复杂系统建模、控制与优化等研究:电话:0731-88830642;E-mail:huipeng@csu.edu.cn

