өзТәО»ЦГЛЕ·юПөНіөД№жФтЧФРЈХэДЈәэPIDҝШЦЖЖч
ЙЫҝЎЕфЈ¬НхЦЩОДЈ¬АоҪЁУўЈ¬ә«№р»Ә
(№ю¶ыұхАн№ӨҙуС§ »ъРө¶ҜБҰ№ӨіМС§ФәЈ¬әЪБъҪӯ №ю¶ыұхЈ¬150080)
ХӘ ТӘЈәҪйЙЬөзТәО»ЦГЛЕ·юҝШЦЖПөНіөДЧйіЙУл№ӨЧчФӯАнЈ¬ІўАыУГКөКұ№ӨЧчјд(RTW)өД°лОпАн·ВХж»·ҫіәНMATLABПөНіұжК¶№ӨҫЯПдЈ¬¶ФөзТәО»ЦГЛЕ·юПөНіҪшРРПөНіДЈРНұжК¶ј°СйЦӨЎЈМбіцТ»ЦЦ№жФтЧФРЈХэДЈәэPIDҝШЦЖЖчЈ¬ІўҪ«ЖдУГУЪұжК¶өГөҪөДДЈРНЦРЈ¬ЙијЖТ»ЦЦФЪПЯөДДЈәэНЖАнЛг·ЁЈ¬К№өГДЈәэҝШЦЖ№жФтҝЙТФөГөҪКөКұФЪПЯөчХыЎЈ·ВХжҪб№ыұнГчЈә»щУЪ№жФтЧФРЈХэДЈәэPIDҝШЦЖЖчөДөзТәО»ЦГЛЕ·юПөНіөДРФДЬөГөҪҪПҙуёДЙЖЈ¬јИҫЯУРPIDҝШЦЖЖчёЯҫ«¶ИөДУЕөгЈ¬УЦҫЯУРДЈәэҝШЦЖЖчҝмЛЩЎўККУҰРФЗҝөДМШөгЈ¬ұЈЦӨПөНіҫЯУРБјәГөД¶ҜЎўОИМ¬МШРФЎЈ
№ШјьҙКЈәөзТәО»ЦГЛЕ·юПөНіЈ»ДЈРНұжК¶Ј»ЧФРЈХэДЈәэPIDЈ»°лОпАн·ВХж
ЦРНј·ЦАаәЕЈәTH137 ОДПЧұкЦҫВлЈәA ОДХВұаәЕЈә1672-7207(2010)03-0960-06
Rule self-tuning fuzzy-PID controller of
electro-hydraulic position servo system
SHAO Jun-peng, WANG Zhong-wen, LI Jian-ying, HAN Gui-hua
(College of Mechanical and Power Engineering, Harbin University of Science and Technology, Harbin 150080, China)
Abstract: The composition and principle of the electro-hydraulic position servo control system were introduced, and system model identification and verification of electro-hydraulic position servo system were carried out based on semi-physical simulation environment of real-time workshop (RTW) and system identification toolbox in MATLAB. A rule self-tuning fuzzy-PID controller was presented to control the identified model and a new fuzzy inference algorithm was designed to adjust the rules of fuzzy controller on line. The results of simulation show that the performance of the electro-hydraulic position servo system based on rule self-tuning fuzzy-PID controller is improved significantly, which not only holds the precise character of PID controller but also possesses the flexible advantage of fuzzy controller, and it can guarante that the system has good dynamic and static quality.
Key words: electro-hydraulic position servo system; model identification; self-tuning fuzzy-PID; semi-physical simulation
өзТәО»ЦГЛЕ·юПөНіҫЯУРПмУҰЛЩ¶ИҝмЎўҝШЦЖҫ«¶ИёЯЎў¶ҜМ¬О»ЦГёХ¶ИәНОИМ¬ёХ¶ИҙуЎўҝ№ёЙИЕДЬБҰЗҝөИУЕөгЈ¬ұ»№г·әУҰУГУЪёчЦЦ№ӨТө№эіМҝШЦЖБмУт[1]ЎЈө«КЗЈ¬ТәЛЕ·юПөНіКЗөдРНөД·ЗПЯРФПөНіЈ¬ҙжФЪІ»И·¶ЁРФЎўКұұдРФЎўНвҪзёЙИЕәНҪ»ІжсоәПёЙИЕЈ¬БнНв»№КЬөҪИзУНТәрӨ¶ИЎўОВ¶ИЎўПЦіЎ№ӨҝцөИ¶аЦЦІОБҝТтЛШөДУ°Пм[2-3]ЎЈІЙУГҙ«НіөДPIDЛг·ЁКұЈ¬ҝШЦЖІОКэСЎФсҪПА§ДСЈ¬ПөНіҙжФЪҝ№ёЙИЕДЬБҰөНЎўі¬өчБҝҙуөИИұөгЈ»ИфЦ»ІЙУГДЈәэҝШЦЖЛг·ЁЈ¬ЛдИ»ДЬұЬГвPIDЛг·ЁөДДіР©І»ЧгЈ¬ө«ИФҙжФЪОИМ¬ҫ«¶ИҪПөНЈ¬¶ҜМ¬РФДЬЗ·јСЈ¬ҝШЦЖР§№ыТІәЬІ»АнПлөИИұөг[4-5]ЎЈДЈәэPIDҝШЦЖЛг·ЁҪ«ДЈәэҝШЦЖәНPIDҝШЦЖПаҪбәПөД·Ҫ·ЁЈ¬ДЈәэҝШЦЖ№жФтФЪПЯөчХыPIDҝШЦЖЖчІОКэЈ¬№№іЙДЈәэұдПөКэPIDҝШЦЖЖчЈ¬јИҝЙТФұЈБфPIDҝШЦЖЖчГ»УРҫІІоөДМШөгЈ¬УЦДЬ»сөГДЈәэҝШЦЖВі°фРФЗҝөДУЕөгЎЈИ»¶шЈ¬ДЈәэҝШЦЖ№жФтКЗёщҫЭИЛГЗөДҫӯСйЧЬҪбіцАҙөДЈ¬НщНщҫЯУРТ»¶ЁөДЖ¬ГжРФЈ¬ЖХНЁДЈәэҝШЦЖЖчөДҝШЦЖ№жФтТ»ө©И·¶ЁұгІ»ДЬёДұдЈ¬ХвҫНІ»ДЬәЬәГөШККУҰПөНі¶ҜМ¬МШРФөДұд»Ҝ»тЛж»ъёЙИЕөДУ°ПмЈ¬ҙУ¶шУ°ПмДЈәэҝШЦЖөДР§ №ы[6-8]ЎЈОӘҙЛЈ¬ұҫОДЧчХЯФЪСРҫҝДЈәэPIDҝШЦЖЖчөД»щҙЎЙПЈ¬¶ФДЈәэҝШЦЖЖчөДҪб№№ҪшРРёДҪшЈ¬МбіцТ»ЦЦ»щУЪДЈәэҝШЦЖ№жФтЧФРЈХэөДДЈәэPIDёҙәПҝШЦЖЛг·ЁЈ»АыУГКөКұ№ӨЧчјд(RTW)өД°лОпАн·ВХж»·ҫіәНMATLABПөНіұжК¶№ӨҫЯПдЈ¬¶ФөзТәО»ЦГЛЕ·юПөНіҪшРРДЈРНұж К¶Ј»ТФұжК¶өДДЈРНОӘ¶ФПуЙијЖіцөзТәО»ЦГЛЕ·юПөНі№жФтЧФРЈХэДЈәэPIDҝШЦЖЖчЈ¬ІўФЪMATLABПВҪшРРКэЧЦ·ВХжЎЈ
1 өзТәО»ЦГЛЕ·юПөНіөДПөНіГиКц
өзТәО»ЦГЛЕ·юПөНіФӯАн·ҪҝтНјИзНј1ЛщКҫЎЈҙЛПөНіКЗөдРНөД·§ҝШ¶ФіЖёЧПөНіЈ¬ЦчТӘУЙҝШЦЖЖчЎў·ЕҙуЖчЎўЛЕ·ю·§ЎўТәС№ёЧәНО»ЦГҙ«ёРЖчөИЧйіЙЎЈөзТәЛЕ·ю·§өД¶о¶ЁС№БҰОӘ21 MPaЈ»¶о¶ЁБчБҝОӘ30 L/minЈ»ТәС№ёЧөД¶о¶ЁС№БҰ21 MPaЈ¬РРіМОӘХэёә100 mmЈ»ёәФШОӘ750 NЈ»ёәФШёХ¶ИKОӘ115~5 000 N/mmЎЈНј1ЦРЈ¬RОӘёш¶ЁЦөЈ¬YОӘТәС№ёЧөДО»ТЖЎЈјЖЛг»ъПтЛЕ·ю·§КдИлҝШЦЖРЕәЕЈ¬УлО»ТЖҙ«ёРЖч·ҙАЎРЕәЕҪшРРұИҪПЈ¬ІоЦөҫӯҝШЦЖЖчҙҰАнЎў·ЕҙуёшЛЕ·ю·§ТФөзБчРЕәЕҝШЦЖЖдҝӘҝЪЈ¬НЁ№эЛЕ·ю·§өДБчБҝұд»ҜАҙҝШЦЖТәС№ёЧөДО»ТЖЈ¬КөПЦО»ЦГұХ»·ҝШЦЖЎЈ
ёщҫЭТәС№ҝШЦЖАнВЫҝЙНЖөјөзТәО»ЦГЛЕ·юПөНіөДКэС§ДЈРНЈ¬ПөНіөДјт»Ҝҙ«өЭәҜКэОӘЈә

2 »щУЪMATLABөДДЈРНұжК¶
ПөНіДЈРНұжК¶КЗФЪЛЕ·юПөНіКФСйІў»сөГКөІвКдИләНКдіцКэҫЭөД»щҙЎЙПЈ¬ҪшРРұШТӘөДКэҫЭҙҰАнәНјЖЛгЈ¬№АјЖіцТ»ёцУлЛщІвПөНіөИјЫКэС§ДЈРНөД№эіМ[9]ЎЈ
ҫӯҙуБҝөДКФСйІЙјҜөҪПөНіКдИлКдіцКэҫЭЈ¬ФЪMATLAB»·ҫіП°ѲɼҜөҪөДКэҫЭөјИлЈ¬ҪшРРФӨҙҰАнЈ¬КэҫЭұ»·ЦіЙ2Іҝ·ЦЈәТ»Іҝ·ЦЧчОӘ№ӨЧчКэҫЭҪшРРДЈРНұжК¶Ј¬БнТ»Іҝ·ЦЧчОӘСйЦӨКэҫЭЎЈұжК¶ДЈРНІЙУГARXДЈРНәНЧҙМ¬ҝХјдДЈРНЈ¬»сөГөДөзТәО»ЦГЛЕ·юПөНіөДұжК¶ДЈРНұХ»·ҙ«өЭәҜКэОӘЈә

ИЎ·ҙАЎПөКэОӘ1Ј¬ёщҫЭ·ҙАЎПөНіҙ«өЭәҜКэЦ®јдөД№ШПөЈ¬ҝЙөГұжК¶ДЈРНөДҝӘ»·ҙ«өЭәҜКэОӘЈә

ДЈРНұжК¶өГөҪөДПөНіҝӘ»·ҙ«өЭәҜКэРиТӘСйЦӨЎЈТтөзТәЛЕ·юПөНіҫЯУРөдРНөД·ЗПЯРФМШөгЈ¬ТтҙЛЈ¬СйЦӨДЈРНұжК¶өДХэИ·РФКұЈ¬РиТӘФЪІ»Н¬№ӨҝцПВ¶аҙОКөСйЈ¬јЗВј¶аЧйКэҫЭЎЈФЪАлПЯМхјюПВ¶ФұжК¶ДЈРНҪшРР·ВХжЈ¬И»әуЈ¬ФЪөзТәО»ЦГЛЕ·юПөНіКФСйМЁЙПҪшРРКөСйЈ¬КдИлРЕәЕОӘХэПТІЁЈ¬·щЦөОӘ1Ј¬ЖөВКОӘ1 HzЈ¬ЛщөГұжК¶ДЈРНөДСйЦӨЗъПЯИзНј2ЛщКҫЎЈҝЙјыЈәПөНіКФСйУлұжК¶ДЈРНөДХэПТРЕәЕПмУҰЗъПЯјёәхЦШәПЎЈІ»Н¬№ӨҝцПВөД¶аҙОКөСй¶јЛөГчұжК¶өДДЈРНКЗҝЙРЕөДЎЈ
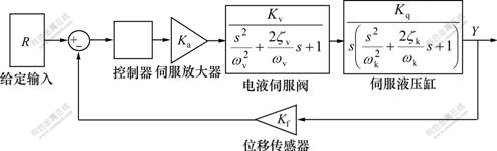
Нј1 өзТәО»ЦГЛЕ·юПөНіЧйіЙНј
Fig.1 Diagram of electro-hydraulic position servo system
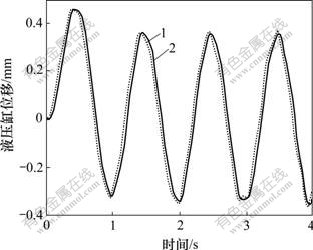
1ЎӘПөНіКФСйХэПТПмУҰЗъПЯЈ»2ЎӘұжК¶ДЈРНХэПТПмУҰЗъПЯ
Нј2 ұжК¶ДЈРНөДСйЦӨЗъПЯ
Fig.2 Validation curves of identification model
3 ҝШЦЖЖчЙијЖ
3.1 №жФтЧФРЈХэДЈәэPIDҝШЦЖЖчөДЙијЖ
№жФтЧФРЈХэДЈәэPIDҝШЦЖЖчөДЦчТӘИООсҫНКЗХТіцPID 3ёцІОКэУлeәНecЦ®јдөДДЈәэ№ШПөЈ¬ФЪФЛРРЦРНЁ№эІ»¶ПјмІвЖ«ІоeЎўЖ«Іоұд»ҜecәНЧФРЈХэТтЧУҰБЈ¬ёщҫЭДЈәэҝШЦЖФӯФт¶Ф3ёцІОКэҪшРРФЪПЯРЮёДЎЈДЈәэPIDҝШЦЖЖчҪ«ДЈәэҝШЦЖәНPIDҝШЦЖПаҪбәПЈ¬АыУГДЈәэҝШЦЖөДҝмПмУҰәНі¬өчБҝРЎТФј°PIDөДҫ«¶ИёЯөДМШөгЈ¬ІЙУГ¶юј¶ҝШЦЖөД·Ҫ·ЁЈ¬МбёЯПөНіөДРФДЬ[10-12]Ј¬№жФтЧФРЈХэfuzzy-PIDҝШЦЖЖчөДҪб№№ИзНј3ЛщКҫЎЈ
PIDҝШЦЖЖчІЙУГО»ЦГКҪКэЧЦPIDЛг·ЁЈ¬Ждҙ«өЭәҜКэОӘЈә
 (4)
(4)
КҪЦРЈәKpОӘұИАэПөКэЈ»KiОӘ»э·ЦПөКэЈ»KdОӘ»э·ЦПөКэЈ»e(k)ОӘПөНіОуІоЎЈKpЈ¬KiәНKdөДХы¶ЁІЙУГКФҙХ·ЁЈ¬өГөҪPID 3ёцҝШЦЖІОКэөДіхКјЦөKp0Ј¬Ki0әНKd0ЎЈ
АыУГҙшЧФРЈХэТтЧУөДҝШЦЖЛг·Ё Ј¬НЁ№эөчХыЧФРЈХэТтЧУ
Ј¬НЁ№эөчХыЧФРЈХэТтЧУ Ј¬ёщҫЭІ»Н¬КұҝМөДОуІоәНОуІоұд»ҜВКёчЧФ¶ФКдіцөДУ°ПміМ¶ИАҙөчХыҝШЦЖ№жФтЎЈөұПөНіОуІоҪПҙуКұЈ¬ОуІо¶ФКдіцөДУ°ПмУҰі¬№эОуІоұд»ҜВКөДУ°ПмЈ¬УҰИЎөГҪПҙуЈ»өұПөНіОуІоҪПРЎКұЈ¬ОуІоұд»ҜВК¶ФКдіцөДУ°ПмФтёьҙуР©Ј¬ҫНУҰИЎҪПРЎЦөЎЈёщҫЭЧФРЈХэТтЧУІ»Н¬өДИЎЦөЈ¬І»¶ПФЪПЯөШөчХыЖ«ІоEәНЖ«Іоұд»ҜВКECөДјУИЁіМ¶ИЈ¬өГөҪPIDҝШЦЖЖчөД3ёцІОКэөДФцБҝ?KpЈ¬?KiәН?KdЈ¬ХвАпөГөҪөДФцБҝОӘДЈәэБҝЈ¬К№УГЧоҙуБҘКф¶И·Ё¶ФЖдҪшРРДЈәэЕРҫцІўІЙУГЛДЙбОеИлөД·Ҫ·ЁҪ«ҝШЦЖБҝҪшРР№жХыЈ¬И»әуЈ¬·ЦұрҪ«?KpЈ¬?KiЈ¬?KdУлKp0Ј¬Ki0Ј¬Kd0ПајУЈ¬ФЪПЯөШ¶ФPIDҝШЦЖІОКэҪшРРРЮёДЈ¬К№ҝШЦЖЖчҫЯУРҪПҝмөДПмУҰЛЩ¶ИЎўҪПРЎөДі¬өчЈ¬Н¬КұЈ¬ҝШЦЖҫ«¶ИёЯЎЈ
Ј¬ёщҫЭІ»Н¬КұҝМөДОуІоәНОуІоұд»ҜВКёчЧФ¶ФКдіцөДУ°ПміМ¶ИАҙөчХыҝШЦЖ№жФтЎЈөұПөНіОуІоҪПҙуКұЈ¬ОуІо¶ФКдіцөДУ°ПмУҰі¬№эОуІоұд»ҜВКөДУ°ПмЈ¬УҰИЎөГҪПҙуЈ»өұПөНіОуІоҪПРЎКұЈ¬ОуІоұд»ҜВК¶ФКдіцөДУ°ПмФтёьҙуР©Ј¬ҫНУҰИЎҪПРЎЦөЎЈёщҫЭЧФРЈХэТтЧУІ»Н¬өДИЎЦөЈ¬І»¶ПФЪПЯөШөчХыЖ«ІоEәНЖ«Іоұд»ҜВКECөДјУИЁіМ¶ИЈ¬өГөҪPIDҝШЦЖЖчөД3ёцІОКэөДФцБҝ?KpЈ¬?KiәН?KdЈ¬ХвАпөГөҪөДФцБҝОӘДЈәэБҝЈ¬К№УГЧоҙуБҘКф¶И·Ё¶ФЖдҪшРРДЈәэЕРҫцІўІЙУГЛДЙбОеИлөД·Ҫ·ЁҪ«ҝШЦЖБҝҪшРР№жХыЈ¬И»әуЈ¬·ЦұрҪ«?KpЈ¬?KiЈ¬?KdУлKp0Ј¬Ki0Ј¬Kd0ПајУЈ¬ФЪПЯөШ¶ФPIDҝШЦЖІОКэҪшРРРЮёДЈ¬К№ҝШЦЖЖчҫЯУРҪПҝмөДПмУҰЛЩ¶ИЎўҪПРЎөДі¬өчЈ¬Н¬КұЈ¬ҝШЦЖҫ«¶ИёЯЎЈ
3.2 ЧФРЈХэТтЧУДЈәэҝШЦЖЖчөДЙијЖ
ДЈәэҝШЦЖЖчөДҪб№№ІЙУГБҪКдИлИэКдіцөД»щұҫРОКҪЎЈКдИлұдБҝІЙУГТәС№ёЧО»ТЖөДЖ«ІоeТФј°Ж«ІоөДұд»ҜecЈ¬КдіцұдБҝОӘ3ёцЧФРЈХэТтЧУҰБ1Ј¬ҰБ2әНҰБ3ЎЈЙиЖ«ІоәНЖ«Іоұд»ҜөДДЈәэВЫУтE әНECҫщИЎОӘ[-3Ј¬+3]Ј¬УпСФұдБҝЦөҫщОӘ{NB(ёәҙу)Ј¬NM(ёәЦР)Ј¬NS(ёәРЎ)Ј¬ZO (Бг)Ј¬PS(ХэРЎ)Ј¬PM(ХэЦР)Ј¬PB(Хэҙу)}={-3Ј¬-2Ј¬-1Ј¬0Ј¬1Ј¬2Ј¬3}Ј»ЧФРЈХэТтЧУҰБ1Ј¬ҰБ2әНҰБ3өДВЫУтИЎОӘ [0Ј¬1]Ј¬УпСФұдБҝЦөҫщОӘ{VB(ҪПҙу)Ј¬MB(ЦРҙу)Ј¬B(ҙу)Ј¬S(РЎ)Ј¬MS(ЦРРЎ)Ј¬VS(ҪПРЎ)}={1Ј¬0.8Ј¬0.6Ј¬0.4Ј¬0.2Ј¬0}ЎЈБҘКфәҜКэЗъПЯИзНј4ЛщКҫЎЈ
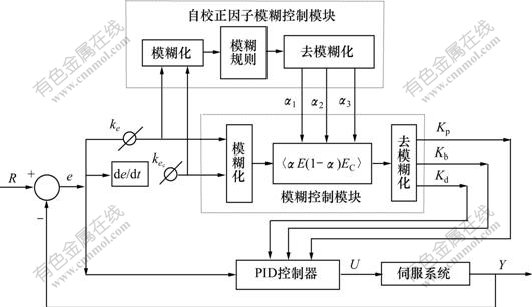
Нј3 fuzzy-PIDҝШЦЖЖчҪб№№Нј
Fig.3 Diagram of fuzzy-PID controller
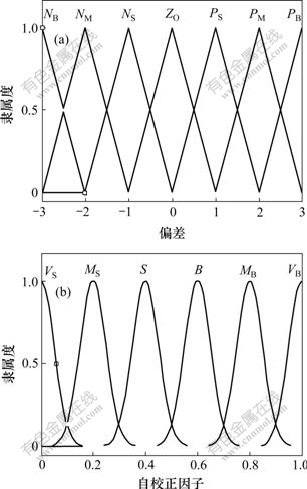
(a) Ж«ІоУлЖ«Іоұд»ҜЈ»(b) ЧФРЈХэТтЧУ
Нј4 ДЈәэјҜКдИл/КдіцұдБҝБҘКфәҜКэЗъПЯ
Fig.4 Memberships curves of inputs/output to Fuzzy set
ДЈәэҝШЦЖ№жФтКЗДЈәэҝШЦЖөДәЛРДЈ¬ёщҫЭЧЁјТЦӘ К¶Ј¬ІОХХДЈәэЧФРЈХэТтЧУИЎЦөЦчТӘФӯФтҝЙТФ№йДЙіцИзНј5ЛщКҫөД»щұҫДЈәэҝШЦЖ№жФтЎЈУҰУГMamdaniЦұҪУНЖАн·ЁәНЎ°ј«ҙу-ј«РЎЎұ·ЁФтҪшРРДЈәэ№ШПөөДәПіЙФЛЛгЈ¬ІўІЙУГЦШРД·ЁҪшРР·ҙДЈәэ»ҜЈ¬ҝЙТФөГөҪЧФРЈХэТтЧУөД»щұҫДЈәэҝШЦЖІЯВФЎЈ
Нј3ЦРөДkeәН ·ЦұрКЗЖ«ІоeөДБҝ»ҜТтЧУәНЖ«Іоұд»ҜecөДБҝ»ҜТтЧУЈ¬Ж«ІоeәНЖ«Іоұд»ҜecөДДЈәэВЫУт¶јОӘ[-3Ј¬+3]Ј¬»щұҫВЫУт·ЦұрОӘ[-0.6Ј¬+0.6]Ј¬[-60Ј¬+60]Ј¬№КkeәНөДіхКјЦө·ЦұрОӘke=3/0.6=5Ј¬= 3/60=0.05Ј¬УГРЎөДФцБҝТ»ІҪТ»ІҪөШ¶ФkeәНҪшРРІОКэУЕ»ҜЈ¬УЕ»ҜөДДҝұкКЗК№ПөНіҫЯУРЎ°ҝмЛЩ-ОЮі¬өчЎұөДҪЧФҫПмУҰМШРФЎЈІЙУГITAEЧјФтЈ¬ІОКэУЕ»ҜөДДҝұкәҜКэОӘЈә
·ЦұрКЗЖ«ІоeөДБҝ»ҜТтЧУәНЖ«Іоұд»ҜecөДБҝ»ҜТтЧУЈ¬Ж«ІоeәНЖ«Іоұд»ҜecөДДЈәэВЫУт¶јОӘ[-3Ј¬+3]Ј¬»щұҫВЫУт·ЦұрОӘ[-0.6Ј¬+0.6]Ј¬[-60Ј¬+60]Ј¬№КkeәНөДіхКјЦө·ЦұрОӘke=3/0.6=5Ј¬= 3/60=0.05Ј¬УГРЎөДФцБҝТ»ІҪТ»ІҪөШ¶ФkeәНҪшРРІОКэУЕ»ҜЈ¬УЕ»ҜөДДҝұкКЗК№ПөНіҫЯУРЎ°ҝмЛЩ-ОЮі¬өчЎұөДҪЧФҫПмУҰМШРФЎЈІЙУГITAEЧјФтЈ¬ІОКэУЕ»ҜөДДҝұкәҜКэОӘЈә

КҪЦРЈәJОӘОуІоәҜКэУлКұјдөД»э·ЦЈ»tОӘ·ВХжКұјдЎЈ
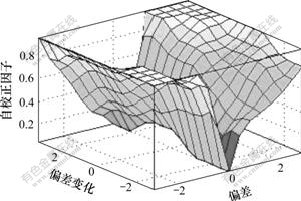
Нј5 ЧФРЈХэТтЧУДЈәэҝШЦЖ№жФт
Fig.5 Self-tuning factor fuzzy control rule
4 ·ВХжСРҫҝ
4.1 »щУЪMATLABөД·ВХж
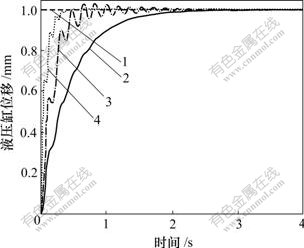
ОӘБЛСйЦӨөзТәО»ЦГЛЕ·юПөНі№жФтЧФРЈХэДЈәэPIDҝШЦЖЖчөДРФДЬЈ¬АыУГMATLABөДSimulink№ӨҫЯ¶ФЖдҪшРР·ВХж·ЦОцЈ¬ҝШЦЖЖчөД·ВХжДЈРНИзНј6ЛщКҫЎЈТФДЈРНұжК¶»сөГөДҝӘ»·ҙ«өЭәҜКэОӘҝШЦЖ¶ФПуЈ¬КдИлөҘО»ҪЧФҫРЕәЕЈ¬·Цұр¶ФіЈ№жПЯРФPIDҝШЦЖЖчЎўДЈәэPIDҝШЦЖЖчТФј°№жФтЧФРЈХэfuzzy-PIDҝШЦЖЖчҪшРР·ВХжЈ¬»сөГөҘО»ҪЧФҫПмУҰҪб№ыИзНј7ЛщКҫЎЈҙ«НіPIDҝШЦЖЖчҪЧФҫПмУҰөчХыКұјдОӘ1.4 sЈ»fuzzy-PIDҝШЦЖЖчҪЧФҫПмУҰЙПЙэКұјдОӘ0.45 sЈ¬өчХыКұјдОӘ0.5 sЈ¬УліЈ№жPIDҝШЦЖПөНіПаұИЈ¬ЖдПөНіөДҝмЛЩРФГчПФМбёЯЈ¬ө«ҙжФЪТ»¶ЁөДОИМ¬ОуІоЎЈ
№жФтЧФРЈХэfuzzy-PIDҝШЦЖЖчЧЫәПҝјВЗБЛПөНіөДҝмЛЩРФәНОИМ¬ҫ«¶ИЈ¬ЙПЙэКұјдОӘ0.24 sЈ¬өчХыКұјдОӘ0.20 sЈ¬ҙУКдіцЗъПЯҝЙТФҝҙіцЈәПөНіПмУҰЛЩ¶ИјУҝмЈ¬Хсөҙ·щ¶ИјхРЎ¶шЗТәЬҝмЛҘјхЦБОИМ¬Ј¬»щұҫГ»УРОИМ¬ОуІоЎЈ
4.2 °лОпАн·ВХж·ЦОц
ёщҫЭКЬҝШ¶ФПуөДКэС§ДЈРНЈ¬ФЪАлПЯЧҙМ¬ПВЙијЖөДҝШЦЖЖчЈ¬·ВХжҪб№ыЦ»КЗХл¶ФКэС§ДЈРНөГіцөДҙҝКэЧЦҪб№ыЈ¬ИфҪ«ХвЦЦҝШЦЖЖчҪшРРУІјюКөПЦЈ¬ЦұҪУУГУЪКөјККЬҝШ¶ФПуөДҝШЦЖЈ¬ҫНІ»Т»¶ЁДЬөГөҪВъТвөДҝШЦЖР§№ыЈ¬ЙхЦБОҙФміЙПөНіЛр»өЈ¬ТтҙЛЈ¬°лОпАн·ВХж·Ҫ·ЁПФөГ·ЗіЈЦШТӘЎЈҪ«КЬҝШ¶ФПу·ЕЦГФЪ·ВХжПөНіЦРҪшРР·ВХжЈ¬јҙОӘУІјюФЪ»ШВ·өД·ВХжЎЈТтОӘЙијЖіцАҙөДҝШЦЖЖчҝЙТФЦұҪУ¶ФКөјККЬҝШ¶ФПуҪшРРҝШЦЖЈ¬ЛщТФЈ¬ҝЙТФөГіц¶ФЖдҝШЦЖР§№ыөДЖАјЫ[13]ЎЈ°лОпАн·ВХжПөНіІЙУГxPC Windows TargetsЈ¬ЛЮЦч»ъОӘPC»ъЈ¬УГУЪФЛРРSimulinkЈ¬ЙијЖЎўҙҙҪЁҝШЦЖЖчЈ»Дҝұк»ъОӘСР»Ә№ӨҝШ»ъЈ¬НЁ№эКдИлКдіцҪУҝЪҝЁТФј°КэҫЭПЯҪ«КөјКөДКЬҝШ¶ФПуәНЛЮЦч»ъБ¬ҪУЖрАҙЈ¬іЙОӘТ»ёцКөКұПөНіЎЈ
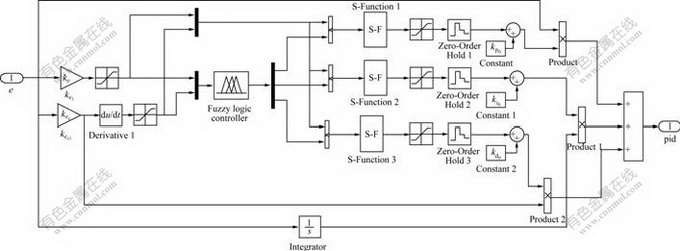
Нј6 №жФтЧФРЈХэfuzzy-PIDҝШЦЖЖчөД·ВХжДЈРН
Fig.6 Simulink model of self-tuning fuzzy-PID controller
1ЎӘПөНіКдИлЗъПЯЈ»2ЎӘPIDҝШЦЖЗъПЯЈ»3ЎӘfuzzy-PIDҝШЦЖЗъПЯЈ»4ЎӘ№жФтЧФРЈХэfuzzy-PIDҝШЦЖЗъПЯ
Нј7 өҘО»ҪЧФҫПмУҰ¶ФұИЗъПЯ
Fig.7 Comparison curves of simulation unit step response
ұҫСРҫҝФЪMATLAB/SIMULINKөД»·ҫіПВЈ¬АыУГMATLABКөКұКУҙ°ДҝұкАҙКөПЦПөНіөДКөКұҝШЦЖәНРЕәЕҙҰАнЈ¬УГЙијЖөДҝШЦЖЖчЦұҪУҝШЦЖөзТәО»ЦГЛЕ·юПөНіЈ¬¶ФЖдҪшРР°лОпАн·ВХжКФСйЎўФЪПЯөШјмСйПөНіҝШЦЖ[14]ЎЈКдИлОӘөҘО»ҪЧФҫРЕәЕЈ¬·ВХжҪб№ыИзНј8ЛщКҫЎЈPIDҝШЦЖОИМ¬ҫ«¶ИёЯЈ¬ө«ІОКэұд»ҜөДККУҰДЬБҰҪПІоЈ¬ПөНіөчХыКұјдіӨЈ¬ҝмЛЩРФДЬІ»әГЈ»fuzzy-PIDҝШЦЖЖчөДҝмЛЩРФДЬҪПәГЈ¬ө«ПөНіҙжФЪТ»¶ЁөГХсөҙЈ»№жФтЧФРЈХэfuzzy-PIDҝШЦЖЖчәЬәГөШТЦЦЖБЛПөНіі¬өчЈ¬¶шЗТҝмЛЩРФДЬәГЈ¬ОИМ¬ҫ«¶ИҪПёЯЎЈ
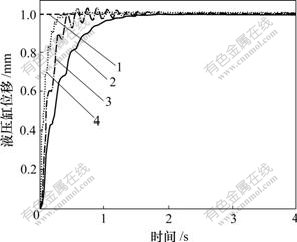
1ЎӘПөНіКдИлЗъПЯЈ»2ЎӘPIDҝШЦЖЗъПЯЈ»3ЎӘfuzzy-PIDҝШЦЖЗъПЯЈ»4ЎӘ№жФтЧФРЈХэfuzzy-PIDҝШЦЖЗъПЯ
Нј8 °лОпАн·ВХжЗъПЯ
Fig.8 Curves of semi-physical simulation
·ЦОц·ВХжҪб№ыұнГчЈәПөНіКөјКІъЙъөДІЁРОУлјЖЛг»ъ·ВХжөДІЁРОІ»М«Т»ЦВЈ¬ЗъПЯІўІ»ЖҪ»¬ЎЈІЙУГfuzzy-PIDҝШЦЖәН№жФтЧФРЈХэfuzzy-PIDҝШЦЖКұЈ¬КөСйҪб№ыұИ·ВХжҪб№ыәГЈ¬ЦчТӘКЗТтОӘҝШЦЖЖчФЪRTWПВөД·ВХжКөСйЦРЈ¬ТэУГБЛLook-Up TableДЈҝйЈ¬ЖдЦРКэҫЭјдөДПЯРФІеЦө№ШПөІўІ»ДЬНкИ«·ҙУіДЈәэҝШЦЖЖчөДІйұн·ҪКҪ[15]ЎЈБнНвЈ¬АлПЯКэЧЦ·ВХжКЗҪЁБўФЪПөНіұжК¶өДПЯРФДЈРН»щҙЎЙПөДЈ¬¶шФЪКөјКПөНіЦР»№УРРн¶аІ»И·¶ЁРФәН·ЗПЯРФТтЛШөДУ°ПмЎЈ°лОпАн·ВХжКөСйөДҪб№ыәНјЖЛг»ъ·ВХжөДҪб№ыЧЬМеЙПЗчУЪТ»ЦВЎЈ
5 ҪбВЫ
(1) ¶ФөзТәО»ЦГЛЕ·юПөНіҪшРРБЛДЈРНұжК¶әНСйЦӨЈ»ТФұжК¶»сөГөДҙ«өЭәҜКэОӘ¶ФПуЙијЖБЛҝШЦЖЖчЈ¬ІўУГSimulinkҪшРРБЛАлПЯ·ВХжЈ¬№жФтЧФРЈХэfuzzy-PIDҝШЦЖЖчҙуҙуМбёЯБЛПөНіөДҝмЛЩРФДЬІўК№ПөНіөДОИМ¬ОуІо»щұҫПыіэЎЈ
(2) ІЙУГ№жФтЧФРЈХэfuzzy-PIDҝШЦЖЖчөДПөНіөД¶ҜЎўҫІМ¬РФДЬГчПФУЕУЪЖХНЁөДfuzzy-PIDҝШЦЖәНPIDҝШЦЖөД¶ҜЎўҫІМ¬РФДЬЈ¬ЗТ¶ФПөНіІОКэұд»ҜҫЯУРәЬәГөДВі°фРФЎЈ
ІОҝјОДПЧЈә
[1] НхХјБЦ. ҪьҙъөзЖшТәС№ЛЕ·юҝШЦЖ[M]. ұұҫ©: ұұҫ©әҪҝХәҪҙуС§іц°жЙз, 2005: 1-5.
WANG Zhan-lin. Modern electricity hydraulic servo control[M]. Beijing: Beijing University of Aeronautics Astronautics Press, 2005: 1-5.
[2] АоәйИЛ. ТәС№ҝШЦЖПөНі[M]. ұұҫ©: №ъ·А№ӨТөіц°жЙз, 1981: 4-7.
LI Hong-ren. Hydraulic control system[M]. Beijing: National Defense Industry Press, 1981: 4-7.
[3] ОвІ©. »щУЪ¶ЁБҝ·ҙАЎАнВЫөД·ЙРРДЈДвЖчФЛ¶ҜЖҪМЁҝШЦЖПөНіСРҫҝ[D]. №ю¶ыұх: №ю¶ыұх№ӨТөҙуС§»ъөз№ӨіМС§Фә, 2007: 41-45.
WU Bo. Research on flight simulator motion platform control system based on quantitative feedback theory[D]. Harbin: Harbin Institute of Industry. School of Mechanical and Electrical Engineering, 2007: 41-45.
[4] БхҪрзы. ПИҪшPIDҝШЦЖј°ЖдMatlab·ВХж[M]. ұұҫ©: өзЧУ№ӨТөіц°жЙз, 2003: 15-25.
LIU Jin-kun. Advanced PID control and its Matlab emulation[M]. Beijing: Electronics Industry Press, 2003: 15-25.
[5] ЕЛПйББ, ВЮАыОД. ДЈәэPIDҝШЦЖФЪ№ӨТө№шВҜҝШЦЖПөНіЦРөДУҰУГ[J]. №ӨТөВҜ, 2004, 26(3): 38-40.
PAN Xiang-liang, LUO Li-wen. Application of the Fuzzy-PID control in industrial boiler control system[J]. Industrial Furnace, 2004, 26(3): 38-40.
[6] АоКҝУВ. ДЈәэҝШЦЖ: ЙсҫӯҝШЦЖәНЦЗДЬҝШЦЖВЫ[M]. №ю¶ыұх: №ю¶ыұх№ӨТөҙуС§іц°жЙз, 2004: 2-7.
LI Shi-yong. Fuzzy control: Neural networks and intelligent control[M]. Harbin: Harbin Institute of Industry Press, 2004: 2-7.
[7] ЦмАцТө, ОвМи»Ә, ·ҪФ°. ЦұҪУЧФККУҰДЈәэЛг·ЁІОКэөДСЎИЎТФј°·ВХж·ЦОц[J]. ПөНі·ВХжС§ұЁ, 2006, 18(11): 3063-3067.
ZHU Li-ye, WU Ti-hua, FANG Yuan. Parameters selecting of direct adaptive Fuzzy control and simulation[J]. Journal of System Simulation, 2006, 18(11): 3063-3067.
[8] HAN Gui-hua, CHEN Li-hua, SHAO Jun-peng. Study of fuzzy PID controller for industrial steam turbine governing system[C]// Proceedings of ISCIT 2005ЎӘInternational Symposium on Communications and Information Technologies. Beijing: Institute of Electrical and Electronics Engineers Computer Society, 2005: 1228-1232.
[9] КҜПНБј, ОвіЙё». »щУЪMATLABөДЧоРЎ¶юіЛ·ЁІОКэұжК¶Ул·ВХж[J]. ОўҙҰАн»ъ, 2005(6): 44-46.
SHI Xian-liang, WU Cheng-fu. Rls parameter identification and emulate based on Matlab/Simulink[J]. Microprocessors, 2005(6): 44-46.
[10] Ding Y S, Ying H, Shao S H. Typical Takagi-Surgeo PI and PID fuzzy controllers: Analytical structures and stability analysis[J]. Information Sciences, 2003, 151: 245-262.
[11] Golea N. Indirect fuzzy adaptive model-following control for robot manipulators[C]//Proceedings of the 2002 IEEE International Conference on Control Applications. Glasgow: United Kingdom, 2002: 198-202.
[12] №ЛЙъҪЬ, Бхҙәҫк. »щУЪДЈәэЧФХы¶ЁPIDҝШЦЖЖчөД·ЗПЯРФПөНі·ВХж[J]. АјЦЭҪ»НЁҙуѧѧұЁ, 2004, 23(3): 62-64.
GU Sheng-jie, LIU Chun-juan. Simulation of nonlinear-ear control system based on self-adjusting PID controller of fuzzy inference[J]. Journal of Lanzhou Jiaotong University, 2004, 23(3): 62-64.
[13] СҰ¶ЁУо, іВСфИӘ. »щУЪMATLAB/SimulinkөДПөНі·ВХжјјКхУҰУГ[M]. ұұҫ©: Зе»ӘҙуС§іц°жЙз, 2002: 404-416.
XUE Ding-yu, CHEN Yang-quan. System simulink and application based on MATLAB/Simulink[M]. Beijing: Tsinghua University Press, 2002: 404-416.
[14] ХЕБўС«, ¶ӯУсәм, Нх»іҫь. »щУЪ°лОпАн·ВХжјјКхөД»ъөзЛЕ·юПөНіДЈРНұжК¶СРҫҝ[J]. »ъөзТ»Ме»Ҝ, 2006, 12(2): 30-32.
ZHANG Li-xun, DONG Yu-hong, WANG Huai-jun. Research on model identification of mechatronic servo system based on hardware-in-the- loop simulation technology[J]. Mechatronics, 2006, 12(2): 30-32.
[15] ЙЫҝЎЕф, ә«№р»Ә, ¶ӯУсәм, өИ. өзТәО»ЦГЛЕ·юПөНіДЈРНұжК¶ј°ЖдҝШЦЖ·Ҫ·Ё[J]. ЦРДПҙуѧѧұЁ: ЧФИ»ҝЖС§°ж, 2008, 39(2): 333-337.
SHAO Jun-peng, HAN Gui-hua, DONG Yu-hong, et al. Model identification and control method of electro- hydraulic position servo system[J]. Journal of Central South University: Science and Technology, 2008, 39(2): 333-337.
КХёеИХЖЪЈә2009-06-10Ј»РЮ»ШИХЖЪЈә2009-08-21
»щҪрПоДҝЈә№ъјТҝЖјјЦШҙуЧЁПоЧУПоДҝ(2009ZX04002-042-02)Ј»әЪБъҪӯКЎЧФИ»ҝЖС§»щҪрЦШөгЧКЦъПоДҝ(Zjg0702-01)
НЁРЕЧчХЯЈәНхЦЩОД(1979-)Ј¬ДРЈ¬°І»Хё·СфИЛЈ¬І©КҝСРҫҝЙъЈ¬ҙУКВТәС№ЛЕ·юҝШЦЖәН»ъөзТәТ»Ме»ҜСРҫҝЈ»өз»°Јә0451-86390566Ј¬15046653776Ј»E-mail: xinyun0920@163.com
(ұајӯ іВ°®»Ә)

