A novel robust fixed time synchronization of complex network subject to input nonlinearity in the presence of uncertainties and external disturbances
��Դ�ڿ������ϴ�ѧѧ��(Ӣ�İ�)2020���2��
�������ߣ�Mehrdad SHIRKAVAND Mohammad Reza SOLTANPOUR
����ҳ�룺418 - 431
Key words��complex dynamical networks; fixed time; sliding mode control; synchronization; input nonlinearity; uncertainties; disturbances
Abstract: This paper studies the global fixed time synchronization of complex dynamical network, including non-identical nodes with disturbances and uncertainties as well as input nonlinearity. First, a novel fixed time sliding manifold is constructed to achieve the fixed time synchronization of complex dynamical network with disturbances and uncertainties. Second, a novel sliding mode controller is proposed to realize the global fixed time reachability of sliding surfaces. The outstanding feature of the designed control is that the fixed convergence time of both reaching and sliding modes can be adjusted to the desired values in advance by choosing the explicit parameters in the controller, which does not rest upon the initial conditions and the topology of the network. Finally, the effectiveness and validity of the obtained results are demonstrated by corresponding numerical simulations.
Cite this article as: Mehrdad SHIRKAVAND, Mohammad Reza SOLTANPOUR. A novel robust fixed time synchronization of complex network subject to input nonlinearity in the presence of uncertainties and external disturbances [J]. Journal of Central South University, 2020, 27(2): 418-431. DOI: https://doi.org/10.1007/s11771-020- 4306-1.

J. Cent. South Univ. (2020) 27: 418-431
DOI: https://doi.org/10.1007/s11771-020-4306-1

Mehrdad SHIRKAVAND, Mohammad Reza SOLTANPOUR
Department of Electrical Engineering, Shahid Sattari Aeronautical University of Science and Technology, Tehran, Iran
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2020
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2020
Abstract: This paper studies the global fixed time synchronization of complex dynamical network, including non-identical nodes with disturbances and uncertainties as well as input nonlinearity. First, a novel fixed time sliding manifold is constructed to achieve the fixed time synchronization of complex dynamical network with disturbances and uncertainties. Second, a novel sliding mode controller is proposed to realize the global fixed time reachability of sliding surfaces. The outstanding feature of the designed control is that the fixed convergence time of both reaching and sliding modes can be adjusted to the desired values in advance by choosing the explicit parameters in the controller, which does not rest upon the initial conditions and the topology of the network. Finally, the effectiveness and validity of the obtained results are demonstrated by corresponding numerical simulations.
Key words: complex dynamical networks; fixed time; sliding mode control; synchronization; input nonlinearity; uncertainties; disturbances
Cite this article as: Mehrdad SHIRKAVAND, Mohammad Reza SOLTANPOUR. A novel robust fixed time synchronization of complex network subject to input nonlinearity in the presence of uncertainties and external disturbances [J]. Journal of Central South University, 2020, 27(2): 418-431. DOI: https://doi.org/10.1007/s11771-020- 4306-1.
1 Introduction
In recent decades, rapidly increasing attentions have been devoted to the research of complex dynamical networks. There are many large-scale systems in nature and man-made societies that can be described by complex dynamical networks. Recently, the synchronization problem of complex dynamical networks has attracted a lot of attention due to its broad applications in different fields, such as engineering, secure communications, cooperative control of unmanned aerial vehicles, target tracking of sensor networks, power grids, ecology, climatology, sociology, biology and traffic. So far, many types of control methods have been utilized in the literatures, including output feedback control [1, 2], state feedback control [3-5], impulsive control [6, 7], intermittent control [8, 9], pinning control [10, 11], adaptive control [12, 13], sliding mode control [14-17] and so on. These results were concerned with the asymptotic synchronization of complex dynamical networks. It means that the complete synchronization is said to achieve, when time goes to infinity. Whereas, it is more desired to synchronize complex dynamical networks within a finite time in practical engineering applications.
Based on the concept of finite time stability [18], many types of control schemes were proposed for finite time synchronization of complex dynamical networks [19-29]. Although finite-time control schemes can achieve faster synchronization,the settling time of finite time synchronization is related to the initial conditions of the networks. This disadvantage of the finite time technique can make troubles in the practical applications, as the initial conditions of the network are not known. In this case, it is hard to obtain estimated synchronization time.
To overcome the drawbacks, the concept of fixed time stability has been introduced [30], which can obtain more precise convergence time of the system independently on initial conditions. Based on the concept, the convergence time upper bounded by a positive constant, called the fixed convergence time, which is independent of the initial conditions. Up to now, several studies were investigated to achieve the fixed time synchronization for complex dynamical networks [31-34]. However, in these studies, the fixed convergence time is a sophisticated function of the network��s topology as well as the controller��s parameters. Moreover, a common fixed time lemma has been utilized to realize the fixed time synchronization of the network.
On the other hand, the control inputs of practical systems are usually subject to nonlinearity as a result of physical constraints. It has been shown that the input nonlinearity can degrade cause system performance, reduce the rate of response and in a worst-case scenario, even cause system failure if the control protocol is not well designed [35]. Therefore, the effects of input nonlinearity should be taken into account when analyzing and realizing a control protocol. In Ref. [36], the effects of dead-zone nonlinearity are investigated for electromechanical systems by employing adaptive control. In Ref. [37], a sliding mode controller is proposed for chaos synchronization in a finite time with input nonlinearity.
Yet, a review of the existing literature reveals that there is a study on the synchronization problem of networks subject to input nonlinearity up to now. In Ref. [38], the sliding mode controller was investigated for the global asymptotic synchronization of the chaotic network system with input nonlinearity in the absence of the model uncertainties and exogenous disturbances. It is notable that both reaching and sliding modes are globally asymptotically stable.
Motivated by aforementioned discussion, the global fixed time synchronization of complex dynamical network with nonidentical nodes subject to input nonlinearity in the presence of exogenous disturbances and uncertainties is investigated in this paper. In this regard, the sliding mode control strategy is utilized due to its advantages of robustness against plant parameter variations and external disturbances, easy implementation, fast response and so on. First, a completely novel fixed time sliding surface is designed to achieve globally synchronization of the complex dynamical network in fixed time. Second, a completely novel fixed time sliding mode controller is proposed to ensure that the origin of the synchronization error system is globally fixed time stable. It is shown that the upper bound of settling time function is independent of initial conditions as well as the topology of the network. The fixed settling time can be obtained and adjusted to any desired value according to the performance requirements in advance by tuning the design parameter explicitly existing in the controller.
The paper is organized as follows. In Section 2, preliminaries and model description are presented. In Section 3, the main results are shown. In Section 4, some numerical simulations are provided to illustrate the effectiveness of the theoretical results. Finally, the conclusions are drawn in Section 5.
2 Preliminaries
Consider a complex dynamical network consisting of N non-identical nodes, where each node is an n-dimensional dynamic system. The dynamics of each controlled node in the presence of disturbances as well as uncertainties with input nonlinearity is described by the differential equation system [39]:
 (1)
(1)
where  Rn is the state vector of the i-th node;
Rn is the state vector of the i-th node; 
 Rnis a continuous non-linear function;
Rnis a continuous non-linear function;  Rn and
Rn and Rndenote the uncertainties and disturbances, respectively; the constant c>0 is the coupling strength; the constant matrix
Rndenote the uncertainties and disturbances, respectively; the constant c>0 is the coupling strength; the constant matrix is the coupling configuration matrix representing the topological structure of the network, wherein aij is defined as follows: if there is a connection between node i and node j (i��j), then aij=aji=1; otherwise, aij=aji=0. Moreover,
is the coupling configuration matrix representing the topological structure of the network, wherein aij is defined as follows: if there is a connection between node i and node j (i��j), then aij=aji=1; otherwise, aij=aji=0. Moreover,
 Rn is control input;
Rn is control input;
 Rn represents the non-linear input of node i with ��ij(0)=0 satisfying following sector conditions:
Rn represents the non-linear input of node i with ��ij(0)=0 satisfying following sector conditions:
 (2)
(2)
where and
and  for i=1, 2, ��, N and j=1, 2, ��, n are positive constants.
for i=1, 2, ��, N and j=1, 2, ��, n are positive constants.
Consider the following isolated node with n-dimensional dynamics:
 (3)
(3)
where  Rn is the time solution of the isolated node; and
Rn is the time solution of the isolated node; and 
 Rn is a continuous nonlinear function.
Rn is a continuous nonlinear function.
The synchronization error of the network is defined as follows:
 (4)
(4)
where  Rn. Accordingly, the synchronization error system can be obtained as follows:
Rn. Accordingly, the synchronization error system can be obtained as follows:

 (5)
(5)
Now, the fixed time synchronization problem of the complex dynamical network is transformed into the fixed time stabilization problem for the synchronization error system as in Eq. (5).
Assumption 1: There are positive constants  and
and  for i=1, 2, ��, N and j=1, 2, ��, n such that
for i=1, 2, ��, N and j=1, 2, ��, n such that
 (6)
(6)
Definition 1 [40]: The equilibrium point  of the i-th node of Eq. (5) is said to be globally finite time stable, if it is Lyapunov stable and if there exists a scaler function
of the i-th node of Eq. (5) is said to be globally finite time stable, if it is Lyapunov stable and if there exists a scaler function  called the settling-time function, such that for every
called the settling-time function, such that for every  the solution
the solution of Eq. (5) is defined on
of Eq. (5) is defined on  and
and
Definition 2 [40]: The equilibrium point  of the i-th node of Eq. (5) is globally fixed time stable, if it is globally finite time stable, and the settling function
of the i-th node of Eq. (5) is globally fixed time stable, if it is globally finite time stable, and the settling function  is upper bounded by ��max>0, i.e.,
is upper bounded by ��max>0, i.e., 
In the following, a novel dynamical system is introduced and it is proved that the presented dynamic is fixed-time stable.
Lemma 1: Consider the following system:
 (7)
(7)
where ��, T s>0, and �� is a ratio of two odd positive integers with 0<��<0.5. Then the equilibrium x=0 is said to be fixed time stable, and the upper bound of settling time satisfies:
 (8)
(8)
Proof: Let V=x2 as the Lyapunov function. Taking time derivative of V along Eq. (7) yields:
 (9)
(9)
Therefore, x(t) will converge to the origin asymptotically. Moreover, we can write:
 (10)
(10)
Taking integral from both sides of Eq. (10), yields:
 (11)
(11)
Let  where ��(x0) denotes the settling time function. Take limit from both sides of Eq. (11) as t����(x0), resulting in:
where ��(x0) denotes the settling time function. Take limit from both sides of Eq. (11) as t����(x0), resulting in:
 (12)
(12)
Therefore, x(t) converges to zero in a finite time. It is evident that the convergence time is relevant to the initial conditions, while the exact information of initial conditions is unreachable in most practical applications. Therefore, it is hard to obtain the estimated convergence time. However, it is obvious that 0��arctan(��V��(0))<��/2. Thus from Eq. (12), it can be verified that ��(x0) is bounded by
(13)
Therefore, the settling time is upper bounded by a design parameter that is not relevant to the initial condition. The proof is completed.
3 Main results
In this section, the global fixed time synchronization of complex network in the presence of disturbances and uncertainties with the input nonlinearity is discussed. In this regard, a novel sliding surface is constructed as follows:
 (14)
(14)
where ��1 is the ratio of two positive odd integers with 0<��1<0.5, for i=1, 2, ��, N, j=1, 2, ��, n;  and a1 is an arbitrary positive constant.
and a1 is an arbitrary positive constant.
Lemma 2: Suppose that uij=hijsgn(sij) with hij>0 is the control input. Then, the following inequality holds:
 (15)
(15)
Proof: Substituting uij in the left-hand side of Eq. (2) by uij=hijsgn(sij), we get:
 (16)
(16)
Since multiplying both sides of Eq. (16) by
multiplying both sides of Eq. (16) by  yields
yields
(17)
The proof is complete.
In the following theorem, a novel sliding mode controller is designed to drive the error trajectories onto the constructed sliding surface in the fixed time.
Theorem 1: Consider the error dynamics in
Eq. (5) satisfying Assumption 1. The error trajectory of Eq. (5) reaches the corresponding sliding manifold sij=0 in the fixed time, for i=1, 2, ��, N and j=1, 2, ��, n, if the sliding mode controller is designed as follows:


 hijsgn(sij) (18)
hijsgn(sij) (18)
where the constant ��2 is the ratio of two positive odd integers such that 0<��2<0.5, and ��ij for i=1, 2, ��, N, j=1, 2, ��, n, are arbitrary positive constants, a2 is an arbitrary positive constant, and sgn(��) is the sign function.
and ��ij for i=1, 2, ��, N, j=1, 2, ��, n, are arbitrary positive constants, a2 is an arbitrary positive constant, and sgn(��) is the sign function.
Proof: Select the Lyapunov function as following form:
 (19)
(19)
Differentiating of Eq. (19) along Eq. (5) yields:


 (20)
(20)
It is obvious that

 (21)
(21)
By Assumption 1 and Lemma 2, Eq. (21) becomes:

 (22)
(22)
Inserting hij from Eq. (18) into Eq. (22) yields:
 (23)
(23)
Let  for i=1, 2, ��, N and j=1, 2, ��, n, then
for i=1, 2, ��, N and j=1, 2, ��, n, then
 (24)
(24)
which shows that Eq. (5) is global asymptotically stable. Additionally, by means of Lemma 1, Eq. (5) is also global fixed time stable, and the upper bound of settling time function can be obtained by:
 (25)
(25)
The proof is completed.
When the sliding mode is activated, the following equation holds [41]:
 i=1, 2, ��, N, j=1, 2, ��, n (26)
i=1, 2, ��, N, j=1, 2, ��, n (26)
Accordingly, the dynamics of sliding mode can be obtained as follows:
 (27)
(27)
Theorem 2: The sliding mode dynamics in Eq. (27) can be globally fixed time converged to the origin and the upper bound of settling time described by:
 (28)
(28)
Proof: Select the Lyapunov function as follows:
 (29)
(29)
Take the derivative of V2 along Eq. (28), we have

 (30)
(30)
This means that the origin of Eq. (27) is asymptotically stable. Furthermore, from Lemma 1, it is concluded that the origin of Eq. (27) is also global fixed time stable and the upper bound of settling time described by:
 (31)
(31)
The proof is completed.
Remark 1: The fixed convergence time of the network can be obtained by:
 (32)
(32)
where  and
and  for i=1, 2, ��, N and j=1, 2, ��, n. From Theorem 1 and Theorem 2, it can be concluded that the origin of Eq. (5) is globally stable in the fixed time Tmax, namely, the error dynamics in Eq. (5) can be globally fixed time stabilized at the origin if the control input is given by Eq. (18).
for i=1, 2, ��, N and j=1, 2, ��, n. From Theorem 1 and Theorem 2, it can be concluded that the origin of Eq. (5) is globally stable in the fixed time Tmax, namely, the error dynamics in Eq. (5) can be globally fixed time stabilized at the origin if the control input is given by Eq. (18).
Remark 2: The finite time convergence guarantees that exact convergence can be achieved within finite time, which rest on the initial conditions. However, for many practical engineering applications, it is hard to obtain exact information of the initial conditions, which makes it hard to obtain the convergence time. Therefore, the existing control schemes are unsuitable to be applied into some practical systems that need exact convergence. The designed control can realize synchronization within finite time, which is bounded by the explicit parameters in the controller independent of the initial conditions and the topology of the network. Additionally, the fixed convergence time can be tuned by selecting the parameters to get the required performance.
Remark 3: There is a discontinuous sign function in the control input of Eq. (18), which may result in undesirable chattering problem. To overcome this drawback, the discontinuous term can be approximated by a continuous function such as the saturation function, hyperbolic tangent, and sigmoid function. Furthermore, a free chattering sliding mode control is presented in Ref. [42] to tackle the chattering effect. Therefore, the proposed control can be generalized using the free chattering scheme, such as the above-mentioned integral control, second order sliding mode control.
4 Numerical simulation
In order to illustrate the effectiveness of the obtained results, some examples are provided in this section. Consider a complex dynamical network with six non-identical nodes, whose topology is depicted in Figure 1. The numbers in bracket donate the number of nodes. The Zhu system [43], Rossler system [44], Chen system [45], Lorenz system [46], Liu system [47], and L�� system [48] are used as the nodes of the network. The state trajectories of each node are shown in Figure 2, with the initial condition X1(0)=[-3, -1.25, -5.5]T, X2(0)=[-2, -0.25, -4.5]T, X3(0)=[-1, -0.75, -3.5]T, X4(0)= [0.25, -1.75, 2.5]T, X5(0)=[1, 2.75, -1.5]T, and X6(0)=[2, 3.75, -0.5]T, respectively.
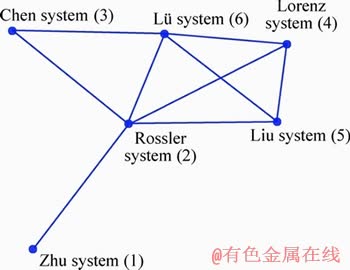
Figure 1 Topology of complex dynamical network
It is desirable that the nodes of the network be synchronized with Arneodo chaotic system [49]. Consider Arneodo system as the desirable trajectories, so that the nodes of the network be synchronized with this isolated node. The trajectories of Arneodo chaotic system with the initial condition Y0=[-1, 2, -3]T is shown in Figure 3.
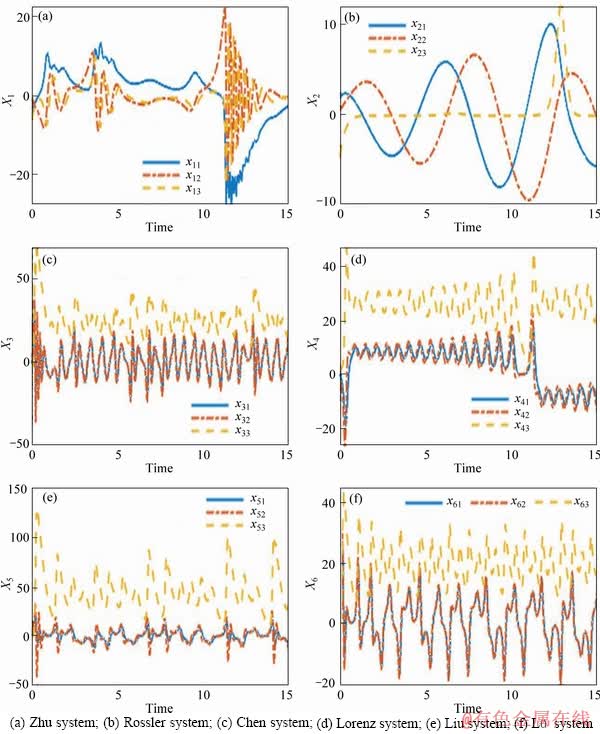
Figure 2 Trajectories of non-identical chaotic nodes of network:
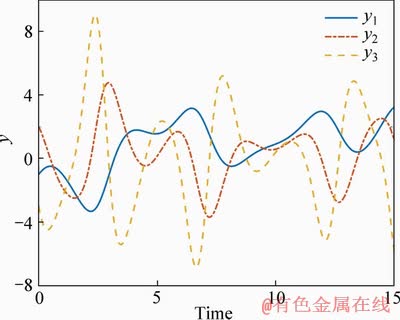
Figure 3 State trajectory of isolated node as desired trajectories
The uncertainty and disturbance terms are considered as ��fij(Xi,t)+dij(t)=mijsin(nij,xij)+pijcos(qijt), where and
and (0, 5) are randomly generated for i=1, 2, ��, 6 and j=1, 2, 3. The input nonlinearities are considered to be ��ij(uij)=(6+3sin(t))uij as a periodic excitation modulated to the designed control. By means of Eq. (2),
(0, 5) are randomly generated for i=1, 2, ��, 6 and j=1, 2, 3. The input nonlinearities are considered to be ��ij(uij)=(6+3sin(t))uij as a periodic excitation modulated to the designed control. By means of Eq. (2),  and
and  are obtained for i=1, 2, ��, 6 and j=1, 2, 3.
are obtained for i=1, 2, ��, 6 and j=1, 2, 3.
4.1 Experiment 1
In this experiment, the effectiveness of the proposed control is evaluated. The parameters of the controller in Eq. (18) are selected as ��1=��2=1/3, a1=a2=1, ��ij=2, c=1, 
 for i=1, 2, ��, 6 and j=1, 2, 3. It can be seen that the network is synchronized before
for i=1, 2, ��, 6 and j=1, 2, 3. It can be seen that the network is synchronized before  time units, which is verified in Figures 4-7. The time responses of the sliding variables are shown in Figure 8. The sliding variables converge to zero before
time units, which is verified in Figures 4-7. The time responses of the sliding variables are shown in Figure 8. The sliding variables converge to zero before time units. The spatiotemporal distribution of the control input and input nonlinearity are shown in Figures 9 and 10, respectively.
time units. The spatiotemporal distribution of the control input and input nonlinearity are shown in Figures 9 and 10, respectively.

Figure 4 Evolution of synchronization error eij for i=1, 2, ��, 6 and j=1, 2, 3
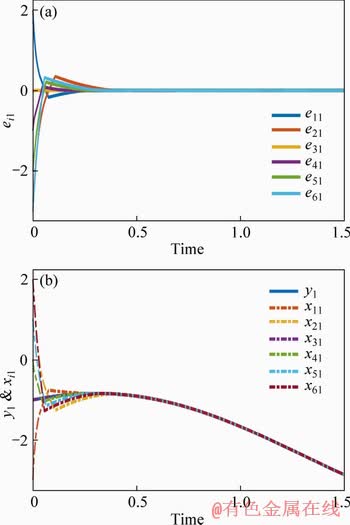
Figure 5 Evolution of synchronization error ei1 for i=1, 2, ��, 6(a) and trajectories of xi1 and y1 for i=1, 2, ��, 6(b)
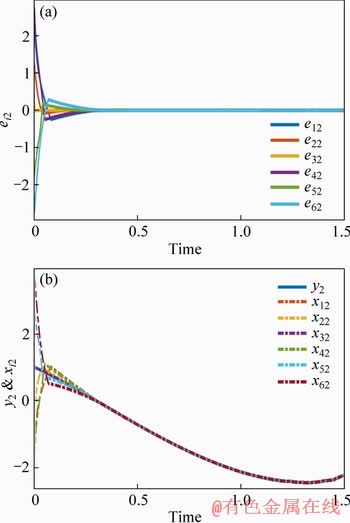
Figure 6 Evolution of synchronization error ei2 for i=1, 2, ��, 6(a) and trajectories of xi2 and y2 for i=1, 2, ��, 6(b)
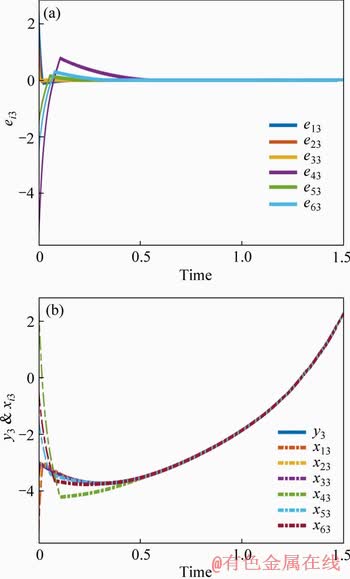
Figure 7 Evolution of synchronization error ei3 for i=1, 2, ��, 6(a) and trajectories of xi3 and y3 for i=1, 2, ��, 6(b)
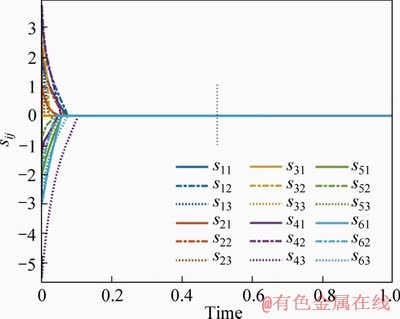
Figure 8 Evolution of sliding variable sij for i=1, 2, ��, 6 and j=1, 2, 3
4.2 Experiment 2
In order to evaluate changing parameters of the controller, the performance indices of integral absolute error (IAE), integral time absolute error (ITAE), integral square error (ISE), integral time square error (ITSE), and root mean square (RMS) are provided in this subsection.The performance indices are defined as 

 and
and 
The performance indices are calculated for each state of the network and the Euclidean norm of the results is tabulated. The simulation is performed within 1.5 time units with the step of 0.0001 time unit to solve equations as well as the results of error performance indices are divided into the number of samples to normalize.
The results of performance indices for ��1 and ��2 are summarized in Table 1. These parameters are selected as (��1, ��2)={(7/31, 7/31), (1/7, 7/31), (7/31, 1/7)}, and other parameters are chosen as same as Experiment 1. From Table 1, it is evident that the amplitude of the control input is increased as well as the convergence time is decreased, whenever each parameter is set to a smaller value.
The results of different values of the parameters  and
and  are reported in Table 2. These parameters are set to
are reported in Table 2. These parameters are set to  ��
�� It is obtained from Table 2 that the amplitude of the control input is increased and the convergence time is reduced, when either parameter is increased.
It is obtained from Table 2 that the amplitude of the control input is increased and the convergence time is reduced, when either parameter is increased.
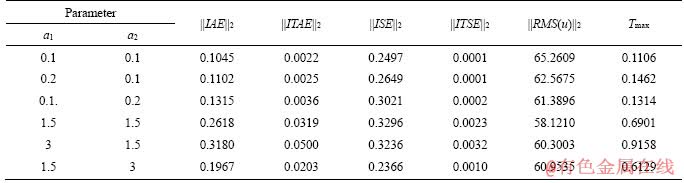
The performance analysis for different values of the parameters a1, a2 is presented in Table 3. The parameters are selected as (a1, a2)={(0.1, 0.1), (0.2, 0.1), (0.1, 0.2), (1.5, 1.5), (3, 1.5), (1.5, 3)}. From Table 3 for a1, a2<1, it is evident that the amplitude of the control signal decreases as well as the convergence time reduces, when these parameters increases. From Table 3 for a1, a2>1, the more the parameters are, the bigger the control signal is. However, the convergence time decreases by increasing a2, whereas it increases by increasing a1. This can be concluded from the designed control given by Eq. (18) as well as the constructed sliding surface given by Eq. (14). It should be pointed out that both reaching time and sliding time will not exceed from the upper bound given by Eqs. (25) and (28), respectively.
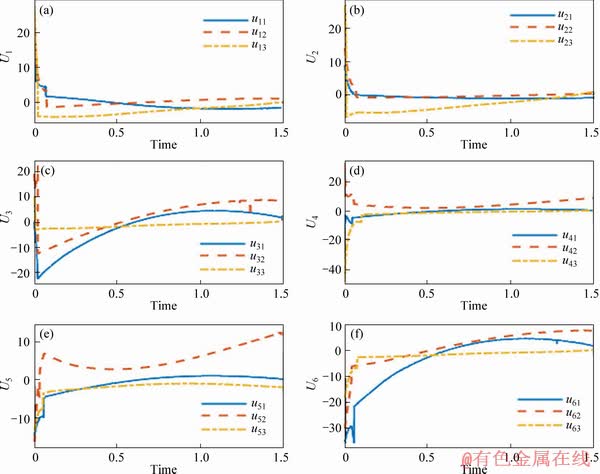
Figure 9 Evolution of control input uij for i=1, 2, ��, 6 and j=1, 2, 3
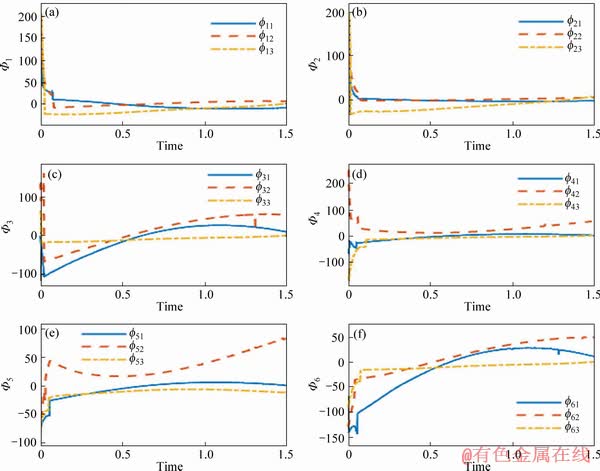
Figure 10 Evolution of non-linear inputs for i=1, 2, ��, 6 and j=1, 2, 3
Table 1 Performance comparison for parameters ��1, ��2

Table 2 Performance comparison for parameters 

Table 3 Performance comparison for parameters a1, a2
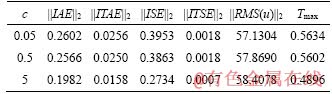
The results of performance analysis of the coupling strength are provided in Table 4. This parameter is set to c={0.05, 0.5, 5}. Table 4 shows the convergence time is decreased by increasing the value of coupling strength.
Table 4 Performance comparison for coupling strength
4.3 Experiment 3
In the following, the results of the proposed control are compared with the results of the method in Ref. [38]. Accordingly, Chua��s oscillator in the absent of disturbances and uncertainties is simulated with the designed control given by Ref. [38]. The parameters of the proposed control are selected as Experiment 1 with  and the initial conditions are randomly generated in (-3, 3). The trajectories of synchronization error are depicted in Figure 11. From Figure 11(b), it is evident that the synchronization error increases, after that it slowly reaches to zero. Therefore, it is undesirable in some practical engineering applications because the state variables may exceed the permitted range. It should be pointed out that the complete synchronization under the designed control in Ref. [38] can be achieved within infinite time. The spatiotemporal distribution of the control inputs is shown in Figure 12. Obviously, the amplitude of control signals of the method in Ref. [38], is larger than the proposed control. Moreover, these control signals are applied to nodes within a short time, which make it impossible to implement in practical applications. The time responses of sliding variables are plotted in Figure 13. From Figure 13, it is evident that the method in Ref. [38] provided shortreaching time due to the larger control signal within the start time. However, the sliding variables reach to zero in the infinite time under the designed control given by��[38]. Furthermore, it is possible to reduce the reaching time of the proposed control by tuning parameters. In this regard, the new situation is provided, in which the design parameters are set to Experiment 1 with
and the initial conditions are randomly generated in (-3, 3). The trajectories of synchronization error are depicted in Figure 11. From Figure 11(b), it is evident that the synchronization error increases, after that it slowly reaches to zero. Therefore, it is undesirable in some practical engineering applications because the state variables may exceed the permitted range. It should be pointed out that the complete synchronization under the designed control in Ref. [38] can be achieved within infinite time. The spatiotemporal distribution of the control inputs is shown in Figure 12. Obviously, the amplitude of control signals of the method in Ref. [38], is larger than the proposed control. Moreover, these control signals are applied to nodes within a short time, which make it impossible to implement in practical applications. The time responses of sliding variables are plotted in Figure 13. From Figure 13, it is evident that the method in Ref. [38] provided shortreaching time due to the larger control signal within the start time. However, the sliding variables reach to zero in the infinite time under the designed control given by��[38]. Furthermore, it is possible to reduce the reaching time of the proposed control by tuning parameters. In this regard, the new situation is provided, in which the design parameters are set to Experiment 1 with 
 The time response of sliding variables and control inputs are shown in Figure 14. From Figure 14, it is obtained that the proposed control provides a faster and more accurate convergence to the origin, while the amplitude of control inputs is smaller than the other method.
The time response of sliding variables and control inputs are shown in Figure 14. From Figure 14, it is obtained that the proposed control provides a faster and more accurate convergence to the origin, while the amplitude of control inputs is smaller than the other method.
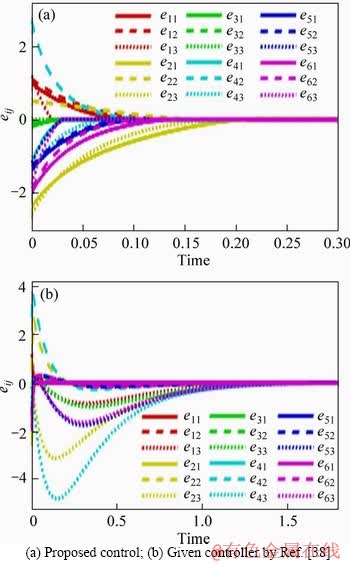
Figure 11 Evolution of synchronization error under:
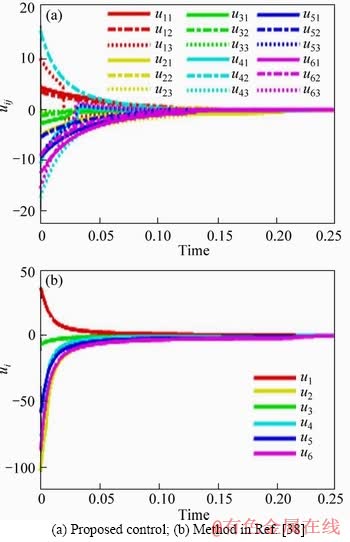
Figure 12 Control signals:
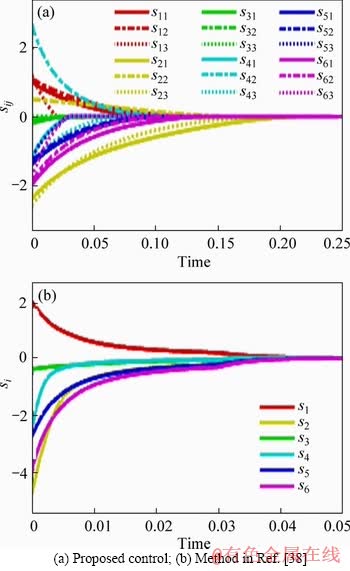
Figure 13 Evolution of sliding the sliding variable:
5 Conclusions
In this paper, the global fixed time synchronization problems of complex dynamical network with non-identical nodes in the presence of both exogenous disturbances and uncertainties and the input nonlinearity have been investigated. A novel sliding surface is constructed to design an appropriate sliding mode controller in order to realize the global synchronization of the network in fixed time. In addition, the fixed convergence time can be tuned by choosing the explicit parameters in the controller. It would be interesting to extend the obtained results here to the complex dynamical network with delay, random input, non-linear coupling characteristic and fractional order systems. These topics will be considered in further studies.
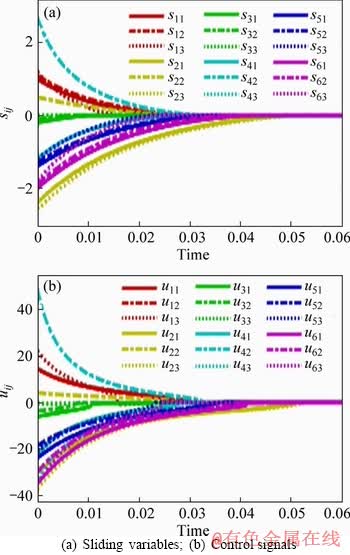
Figure 14 Evolution:
References
[1] SHI Chong-xiao, YANG Guang-hong, LI Xiao-jian. Event- triggered output feedback synchronization control of complex dynamical networks [J]. Neurocomputing, 2018, 275: 29-39. DOI: 10.1016/j.neucom.2017.05.014.
[2] XIAO Xiang, LI Xiao-jian, JIN Xiao-zheng, CUI Yan. Output synchronization control for a class of complex dynamical networks with non-identical dynamics [J]. Applied Mathematics and Computation, 2018, 335: 38-49. DOI: 10.1016/j.amc.2018.04.029.
[3] LUO Yi-ping, DENG Fei, LING Zhao-min, CHENG Zi-feng. Local H�� synchronization of uncertain complex networks via non-fragile state feedback control [J]. Mathematics and Computers in Simulation, 2019, 155: 335-346. DOI: 10.1016/j.matcom.20 18.07.009.
[4] ZHANG Li-li, WANG Yin-he, HUANG Yuan-yuan. Synchronization for non-dissipatively coupled time-varying complex dynamical networks with delayed coupling nodes [J]. Nonlinear Dynamics, 2015, 82(3): 1581-1593. DOI: 10.1007/s11071-015-2262-3.
[5] DU Hong-ye. Function projective synchronization in complex dynamical networks with or without external disturbances via error feedback control [J]. Neurocomputing, 2016, 173: 1443-1449. DOI: 10.1016/j.neucom.2015.09.018.
[6] BAGHERI A, OZGOLI S. Exponentially impulsive projective and lag synchronization between uncertain complex networks [J]. Nonlinear Dynamics, 2016, 84(4): 2043-2055. DOI: 10.1007/s11071-016-2627-2.
[7] ZHAO Hui, LI Li-xiang, PENG Hai-peng, XIAO Jing-hua, YANG Yi-xian, ZHENG Ming-wen. Impulsive control for synchronization and parameters identification of uncertain multi-links complex network [J]. Nonlinear Dynamics, 2016, 83(3): 1437-1451. DOI: 10.1007/s11071-015-2416-3.
[8] LIANG Yi, QI Xiao-long, WEI Qiang. Synchronization of delayed complex networks via intermittent control with non-period [J]. Physica A: Statistical Mechanics and its Applications, 2018, 492: 1327-1339. DOI: 10.1016/j.physa. 2017.11.060.
[9] CHENG Li-yan, CHEN Xiang-yong, QIU Jian-long, LU Jian-quan, CAO Jin-de. Aperiodically intermittent control for synchronization of switched complex networks with unstable modes via matrix ��-measure approach [J]. Nonlinear Dynamics, 2018, 92: 1091-1102. DOI:10.1007/s11071-018- 4110-8.
[10] XU Meng, WANG Jin-liang, HUANG Yan-lin, WEI Pu-chong, WANG Shu-xue. Pinning synchronization of complex dynamical networks with and without time-varying delay [J]. Neurocomputing, 2017, 266: 263-273. DOI: 10.1016/j.neucom.2017.05.040.
[11] SONG Qiang, CAO Jin-de, LIU Fang. Pinning-controlled synchronization of hybrid-coupled complex dynamical networks with mixed time-delays [J]. International Journal of Robust and Nonlinear Control, 2012, 22(6): 690-706. DOI: 10.1002/rnc.1725.
[12] YU Wen-wu, DELELLIS P, CHEN Guan-rong, BERNARDO D M, KURTHS J. Distributed adaptive control of synchronization in complex networks [J]. IEEE Transactions on Automatic Control,2012, 57(8): 2153-2158. DOI: 10.1109/TAC.2012.2183190.
[13] TAN Man-chun, PAN Qi, ZHOU Xuan. Adaptive stabilization and synchronization of non-diffusively coupled complex networks with nonidentical nodes of different dimensions [J]. Nonlinear Dynamics, 2016, 85(1): 303-316. DOI: 10.1007/s11071-016-2686-4.
[14] LU Ling, LI Cheng-ren, BAI Su-yuan, LI Gang, RONG Ting-ting, GAO Yan, YAN Zhe. Synchronization of uncertain time-varying network based on sliding mode control technique [J]. Physica A: Statistical Mechanics and its Applications, 2017, 482: 808-817. DOI: 10.1016/j.physa. 2017.04.167.
[15] LI Cheng-ren, LU Ling, ZHAO Guan-nan, LI Gao, TIAN Jing, GU Jia-jia, WANG Zhou-yang. Projective synchronization of uncertain scale-free network based on modified sliding mode control technique [J]. Physica A: Statistical Mechanics and its Applications, 2017, 473: 511-521. DOI: 10.1016/j.physa.2017.01.040.
[16] LU Ling, LI Cheng-ren, LIU Shuo, YAN Bing-bing, CHANG Huang, ZHOU Jia-nan, LIU Ye. Projective synchronization of a class of complex network based on high-order sliding mode control [J]. Nonlinear Dynamics, 2013, 73(1, 2): 411-416. DOI: 10.1007/s11071-013-0796-9.
[17] HOU Hua-zhou, ZHANG Qing-ling, ZHENG Meng. Cluster synchronization in nonlinear complex networks under sliding mode control [J]. Nonlinear Dynamics, 2016, 83(1, 2): 739-749. DOI: 10.1007/s11071-015-2363-z.
[18] BHAT S P, BERNSTEIN D S. Finite-time stability of continuous autonomous systems [J]. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766. DOI: 10.1137/S0363012997321358.
[19] TAN Man-chun, TIAN Wen-xiu. Finite-time stabilization and synchronization of complex dynamical networks with nonidentical nodes of different dimensions [J]. Nonlinear Dynamics, 2015, 79(1): 731-741. DOI: 10.1007/s11071- 014-1699-0.
[20] LIU Mei, JIANG Hai-jun, HU Cheng. Finite-time synchronization of delayed dynamical networks via aperiodically intermittent control [J]. Journal of the Franklin Institute, 2017, 354(13): 5374-5397. DOI: 10.1016/ j.jfranklin.2017.05.030.
[21] LI Liang-liang, TU Zheng-wei, MEI Jun, JIAN Ji-gui. Finite-time synchronization of complex delayed networks via intermittent control with multiple switched periods [J]. Nonlinear Dynamics, 2016, 85(1): 375-388. DOI: 10.1007/ s11071-016-2692-6.
[22] MEI Jun, JIANG Ming-hui, XU Wang-min, WANG Bin. Finite-time synchronization control of complex dynamical networks with time delay [J]. Communications in Nonlinear Science and Numerical Simulation, 2013, 18(9): 2462-2478. DOI: 10.1016/j.cnsns.2012.11.009.
[23] JING Tai-yan, CHEN Fang-qi, LI Quan-hong. Finite-time mixed outer synchronization of complex networks with time-varying delay and unknown parameters [J]. Applied Mathematical Modelling, 2015, 39(23, 24): 7734-7743. DOI: 10.1016/j.apm.2015.03.051.
[24] LIU X, YU W, CAO J, ALSAADI F. Finite-time synchronisation control of complex networks via non-smooth analysis [J]. IET Control Theory & Applications, 2015, 9(8): 1245-1253. DOI: 10.1049/iet-cta.2014.0995.
[25] YANG Xin-song, HO D W C, LU Jian-quan, SONG Qiang. Finite-time cluster synchronization of TS fuzzy complex networks with discontinuous subsystems and random coupling delays [J]. IEEE Trans Fuzzy Systems, 2015, 23(6): 2302-2316. DOI: 10.1109/TFUZZ.2015.2417973.
[26] YANG Xin-song, WU Zhi-you, CAO Jin-de. Finite-time synchronization of complex networks with nonidentical discontinuous nodes [J]. Nonlinear Dynamics, 2013, 73(4): 2313-2327. DOI: 10.1007/s11071-013-0942-4.
[27] LIU Shuang, CHEN Li-qun. Second-order terminal sliding mode control for networks synchronization [J]. Nonlinear Dynamics, 2015, 79(1): 205-213. DOI: 10.1007/s11071- 014-1657-x.
[28] AGHABABA M, AGHABABA H. Finite-time stabilization of uncertain non-autonomous chaotic gyroscopes with nonlinear inputs [J]. Applied Mathematics and Mechanics, 2012, 33(2): 155-164. DOI: 10.1007/s10483-012-1540-7.
[29] AGHABABA M P, FEIZI H. Nonsingular terminal sliding mode approach applied to synchronize chaotic systems with unknown parameters and nonlinear inputs [J]. Chinese Physics B, 2012, 21(6): 060506.
[30] POLYAKOV A. Fixed-time stabilization of linear systems via sliding mode control [C]// 2012 12th International Workshop on Variable Structure Systems. IEEE, 2012: 1-6. DOI: 10.1109/VSS.2012.6163469.
[31] ZHANG Wang-li, LI Chuan-dong, HUANG Ting-wen, HUANG Jun-jian. Fixed-time synchronization of complex networks with nonidentical nodes and stochastic noise perturbations [J]. Physica A: Statistical Mechanics and its Applications, 2018, 492: 1531-1542. DOI: 10.1016/j.physa. 2017.11.079.
[32] HUANG Yan-li, QIU Shui-han, REN Shun-yan, ZHENG Ze-wei. Fixed-time synchronization of coupled Cohen�C Grossberg neural networks with and without parameter uncertainties [J]. Neurocomputing, 2018. DOI: 10.1016/ j.neucom.2018. 07.013.
[33] LU Hui, HE Wang-li, HAN Qing-long, PENG Chen. Fixed-time synchronization for coupled delayed neural networks with discontinuous or continuous activations [J]. Neurocomputing, 2018. DOI: 10.1016/j.neucom.2018.06. 037.
[34] LIU X, CHEN T. Fixed-time cluster synchronization for complex networks via pinning control [J]. arXiv preprint arXiv:1509.03350, 2015.
[35] HSU K C. Variable structure control design for uncertain dynamic systems with sector nonlinearities [J]. Automatica, 1998, 34(4): 505-508. DOI: 10.1016/S0005-1098(97)002 33-1.
[36] AGHABABA M P. Adaptive control for electromechanical systems considering dead-zone phenomenon [J]. Nonlinear Dynamics, 2014, 75(1, 2): 157-174. DOI: 10.1007/s11071- 013-1056-8.
[37] AGHABABA M P, AGHABABA H P. A novel finite-time sliding mode controller for synchronization of chaotic systems with input nonlinearity [J]. Arabian Journal for Science and Engineering, 2013, 38(11): 3221-3232. DOI: 10.1007/s13369-012-0459-z.
[38] LI Rong, DUAN Zhi-sheng, CHEN Guan-rong. Global synchronization of drive-response dynamical networks subject to input nonlinearity [J]. Journal of Physics A: Mathematical and Theoretical, 2008, 41(38): 385103. DOI: 10.1088/1751-8113/41/38/385103.
[39] WANG Dan, CHE Wei-wei, YU Hao, LI Jia-yang. Adaptive pinning synchronization of complex networks with negative weights and its application in traffic road network [J]. International Journal of Control, Automation and Systems, 2018, 16(2): 782-790. DOI: 10.1007/s12555-017-0161-8.
[40] POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems [J]. IEEE Transactions on Automatic Control, 2012, 57(8): 2106. DOI: 10.1109/ TAC.2011.2179869.
[41] UTKIN V. Sliding modes in optimization and control problems [M]. New York: Springer Verlag,1992.
[42] AGHABABA M P. Control of fractional-order systems using chatter-free sliding mode approach [J]. Journal of Computational and Nonlinear Dynamics, 2014, 9(3): 031003. DOI: 10.1115/1.4025771.
[43] VAIDYANATHAN S, SAMPATH S, AZAR A T. Global chaos synchronisation of identical chaotic systems via novel sliding mode control method and its application to Zhu system [J]. International Journal of Modelling, Identification and Control, 2015, 23(1): 92-100. DOI: 10.1504/IJMIC. 2015.067495.
[44] PARK J H. Chaos synchronization between two different chaotic dynamical systems [J]. Chaos, Solitons & Fractals, 2006, 27(2): 549-554. DOI: 10.1016/j.chaos.2005.03.049.
[45] AGIZA H, YASSEN M. Synchronization of Rossler and Chen chaotic dynamical systems using active control [J]. Physics Letters A, 2001, 278(4): 191-197. DOI: 10.1016/ S0375-9601(00)00777-5.
[46] YAU H T, YAN J J. Design of sliding mode controller for Lorenz chaotic system with nonlinear input [J]. Chaos, Solitons & Fractals, 2004, 19(4): 891-898. DOI: 10.1016/ S0960-0779(03)00255-8.
[47] LIU Chong-xi, LIU Ta, LIU Ling, LIU Kai. A new chaotic attractor [J]. Chaos, Solitons & Fractals, 2004, 22(5): 1031- 1038. DOI: 10.1016/j.chaos.2004.02.060.
[48] WANG Xiao-qun, AN Lu-jun. Parameter identification and backstepping control of uncertain L�� system [J]. Chaos, Solitons & Fractals, 2003, 18(4): 721-729. DOI: 10.1016/ S0960-0779(02)00659-8.
[49] HUA Chang-chun, GUAN Xin-ping, SHI Peng. Adaptive feedback control for a class of chaotic systems [J]. Chaos, Solitons & Fractals, 2005, 23(3): 757-765. DOI: 10.1016/ j.chaos.2004.05.042.
(Edited by ZHENG Yu-tong)
���ĵ���
��ȷ���Ժ��ⲿ�����µ���������Ը�������³������ʱ��ͬ������
ժҪ�������о��˾����Ŷ��Ͳ�ȷ���ԵIJ���ͬ�ڵ��Լ���������Եĸ��Ӷ�̬����ȫ�̶ֹ�ʱ��ͬ�����⡣���ȣ�������һ�̶ֹ�ʱ�们��������ʵ�־����Ŷ��Ͳ�ȷ���Եĸ��Ӷ�̬����Ĺ̶�ʱ��ͬ������Σ������ʹ�û�ģ��������ʵ�ֻ�ģ�����ȫ�̶ֹ�ʱ��ɴ��ԣ����ص��Dz������ڳ�ʼ�������������˽ṹ��ͨ��ѡ��������е���ʽ���������Խ�����ģ̬�ͻ�ģ̬�Ĺ̶�����ʱ����ǰ����������ֵ�����ͨ����Ӧ����ֵģ����֤�˽������Ч�ԡ��ڲ�ȷ���Ժ������ŵ�����£�������������Եĸ��������³������ʱ��ͬ������
�ؼ��ʣ����Ӷ�̬���磻�̶�ʱ�䣻��ģ���ƣ�ͬ������������ԣ���ȷ���ԣ��Ŷ�
Received date: 2018-11-19; Accepted date: 2019-07-05
Corresponding author: Mohammad Reza SOLTANPOUR, Associate Professor; Tel: +98-21-64032125; E-mail:soltanpour@ssau.ac.ir,m_r_soltanpour@yahoo.com; ORCID: 0000-0001-9643-7642

