≤…Ņ’«Ýľ§Ļ‚ŐĹ≤‚ĺę∂»”įŌž“Úňō∑÷őŲľįőů≤Ó–ř’ż
–‹ŃĘ–¬£¨¬ř÷‹»ę£¨Ő∑ņňņň£¨¬ř’ÍžÕ£¨¬Ļļ∆
(÷–ńŌīů—ß ◊ ‘ī”Žį≤»ęĻ§≥Ő—ß‘ļ£¨ļĢńŌ ≥§…≥£¨410083)
’™“™£ļ’Ž∂‘Ņů…Ĺ≤…Ņ’«Ýľ§Ļ‚…®√Ť Ī“◊”ŕ≤ķ…ķőů≤Ó£¨”įŌžŐĹ≤‚ĺę∂»∂ÝĶľ÷¬Ņ’ľš–ŇŌĘĹ®ń£ ß’śĶńő Ő‚£¨»∑∂®ňýĽŮĶ„‘∆ żĺ›ĶńĻōľŁőů≤Óľī‘Ž…ýĶ„ļÕń£–Õ«„Ĺ«őů≤Ó£¨Ľý”༓ĻōŃ™ņŪ¬Ř∑÷őŲŐĹ≤‚Ļż≥Ő÷–őů≤ÓĶń÷ų“™”įŌž“Úňōľį÷ųīőĻōŌĶ£¨ĹÝ––…ŤĪł“Úňō°ĘĽ∑ĺ≥“Úňō°Ę»ňő™“ÚňōĶń∂ŗ“Úňō∂‘Ī»∑÷őŲ£¨ŐŠ≥ŲĽý”ŕ∂ŗŌÓ Ĺń‚ļŌĶń«„Ĺ«őů≤ÓĶń–ř’ż∑Ĺ∑®ļÕĽý”ŕ∂ĢĹ◊ľłļőѨ–Ý–‘Ķń‘Ž…ýĶ„…ĺ≥ż∑Ĺ∑®°£—–ĺŅĹŠĻŻĪŪ√ų£ļ”įŌž“Úňō∑÷őŲĹŠĻŻŅ…”√ņī÷łĶľŐĹ≤‚Ļż≥Ő£¨ĻśĪ‹őů≤Ó£¨őů≤Ó–ř’żļůĶńŅ’«ÝĪŖĹÁ◊ÝĪÍ°ĘŐŚĽż°Ę∂•įŚĪ©¬∂√śĽżĶ»≤ő żłŁ◊ľ»∑£¨ŐŠłŖŃň≤…Ņ’«Ýľ§Ļ‚ŐĹ≤‚ĺę∂»°£
ĻōľŁī £ļ≤…Ņ’«Ý£ĽŐĹ≤‚ĺę∂»£Ľ“Úňō∑÷őŲ£Ľőů≤Ó–ř’ż
÷–Õľ∑÷ņŗļŇ£ļTD76 őńŌ◊ĪÍ÷嬎£ļA őń’¬ĪŗļŇ£ļ1672-7207(2014)04-1244-07
Impact factors analysis and error correction of laser scanning for goaf
XIONG Lixin, LUO Zhouquan, TAN Lanlan, LUO Zhenyan, LU Hao
(School of Resources and Safety Engineering, Central South University, Changsha 410083, China)
Abstract: Noise points and model inclination error were put forward as the error is easy to be formed in laser scanning of goaf brought about modeling distortion. The main factors of error and the primary-secondary relationships were analysed during goaf detection based on gray relational theory, and multifactor such as equipment, environmental and operator was compared. Inclination error correction method was proposed based on polynomial fitting, and point delete method based on second order geometric continuity. The validation shows that factor analysis can reduce errors effectively and correction data accurately reflects the goaf boundary information, volume and the exposed roof area, thereby providing a technical support for dealing with goaf laser scan.
Key words: goaf; scan accuracy; factor analysis; error correction
ľ§Ļ‚ŐĹ≤‚ «∑÷őŲĶōŌ¬Ņů…Ĺ≤…Ņ’«ÝŅ’ľš–őŐ¨Ķń÷ō“™ ÷∂ő°£◊ľ»∑Ķń≤…Ņ’«ÝŐĹ≤‚ żĺ› «Ņ™≤……Ťľ∆°ĘĶō—ĻŅō÷∆°Ęį≤»ęľŗĻ‹ĶńĽýī°£¨÷ĪĹ”ĻōŌĶĶĹ≤…Ņ’«Ý÷‹ĪŖ≤–ŅůŐŚľįŌŗŃŕŇŐ«ÝŅůŐŚĶńį≤»ęŅ™≤…°£Ļķńŕ–Ū∂ŗŅů…Ĺ»Á∂¨ĻŌ…ĹÕ≠Ņů£¨Ļ„∂ę∑≤ŅŕŅůĶ»£¨∆’Īť Ļ”√ľ§Ļ‚ŐĹ≤‚…ŤĪł∂‘≥ŲŅůļůĶń≤…≥°ĹÝ––ŐĹ≤‚£¨ő™ļů–ÝĶńĽō≤……Ťľ∆°ĘĶō—ĻŅō÷∆Ķ»ŐŠĻ©ĺę»∑ĶńĽýī°–‘◊ ŃŌ°£Ķę «£¨‘ŕ Ķľ ĶńŐĹ≤‚÷–£¨ĽŮ»°Ķńľ§Ļ‚Ķ„‘∆ żĺ›ÕýÕý”––Ū∂ŗ≤ĽŅ…Ī‹√‚Ķńőů≤Ó£¨Ķľ÷¬Ņ’ľš–ŇŌĘĹ®ń£ ß’ś£¨łÝļů–ÝĶń»żő¨Ĺ®ń£ļÕ ż÷Ķń£ń‚‘ž≥…ņŘĽżőů≤Ó[1-2]°£ńŅ«į£¨ĻķńŕÕ‚—ß’Ŗ∂‘Ļ§“Ķ…ķ≤ķ°Ę…ŤĪł÷∆‘žĶ»––“ĶĶń…ķ≤ķ÷ ŃŅŅō÷∆ĹÝ––Ńň–Ū∂ŗ—–ĺŅ£¨≤…”√≤ĽÕ¨Ķń ż—ßń£–Õ»Á∂ĢĹ◊◊‘ĽōĻťń£–Õ°Ę◊īŐ¨Ņ’ľš∑Ĺ≥ŐĶ»[3-4]ņī∑÷őŲŃ„ľĢ…ķ≤ķ°Ę◊ť◊įĻż≥Ő÷–Ķńőů≤ÓŌ÷Ōů£¨∆š÷–√śŌÚĻż≥ŐĶńőů≤ÓŃų∑Ĺ∑®(stream of variation£¨SOV)‘ŕ÷∆‘ž“Ķ÷–”¶”√Ļ„∑ļ°£“≤”–“Ľ–©—ß’Ŗ∂‘ľ§Ļ‚…ŤĪł‘ŕ≥« –ĻśĽģ°ĘļĹŐžļĹŅ’Ķ»Ńž”ÚĶń”¶”√őů≤ÓĹÝ––Ńň—–ĺŅ[5-7]°£Ķę «£¨’Ž∂‘Ņů…Ĺį≤»ę…ķ≤ķ÷–őů≤ÓŅō÷∆Ķń—–ĺŅĹŌ…Ŕ£¨ŐōĪū «ľ§Ļ‚ĺę√‹…ŤĪł‘ŕŅů“Ķ…ķ≤ķłŖő¬°Ę≥Ī ™°Ę∂ŗ∑Ř≥ĺĽ∑ĺ≥÷–Ķń Ļ”√«ťŅŲļÕĹŠĻŻĶń–ř’ż≤Ļ≥š∑Ĺ√śĶń—–ĺŅļ‹…Ŕ°£‘ŕŌ÷≥°ŐĹ≤‚ Ī£¨ŐĹ≤‚–ßĻŻĶń”įŌž“Úňōļ‹∂ŗ£¨įŁņ®…ŤĪłĶń≤Ľő»∂®–‘°Ę≤Ŕ◊ų’ŖĶń≤Ľį≤»ę“Úňō£¨ĽĻ”–Ľ∑ĺ≥Ķń”įŌž£¨ĪňīňľšŌŗĽ•◊ų”√[8-10]°£ő™Ńň∂‘őů≤ÓĹÝ––Ņō÷∆£¨–Ť“™∂‘÷ų“™őů≤ÓĹÝ––∑÷ņŗ£¨∂‘ŐĹ≤‚ĺę∂»”įŌž“ÚňōĹÝ––∑÷őŲ ∂Īū£¨»∑∂®őů≤ÓŐō–‘”ŽŌŗĻō”įŌž“Úňō÷ģľšĶńŌŗĻō–‘£¨≤Ę∂‘∂ŗ“Úňō”įŌžŌ¬Ķńőů≤Ó≤ķ…ķĶń‘≠“ÚĹÝ––∑÷őŲ£¨ŐŠ≥Ųőů≤ÓĶń≤Ļ≥•–ř’żįž∑®£¨īÔĶĹŐŠłŖŐĹ≤‚ĺę∂»ĶńńŅĶń°£ő™īň£¨Īĺőń◊ų’Ŗ‘༓…ęņŪ¬ŘĶńĽýī°…Ō£¨∑÷őŲŅ’«ÝŐĹ≤‚Ķń÷ų“™őů≤Ó£¨“ņÕ–CMS(cavity monitor system)ŐĹ≤‚…ŤĪł[1-2]£¨ ∂Īū≤…Ņ’«Ýľ§Ļ‚ŐĹ≤‚ĺę∂»÷ų“™”įŌž“Úňōľį÷ųīőĻōŌĶ£¨Ő÷¬ŘĽ∑ĺ≥°Ę…ŤĪłļÕ≤Ŕ◊ų’Ŗ∂‘ŐĹ≤‚ĺę∂»Ķń∂ŗ÷ō”įŌž£¨≤ĘŐŠ≥Ųőů≤Ó–ř’żň„∑®°£
1 ŐĹ≤‚ĺę∂»”įŌž“Úňō∑÷őŲ
ňš»Ľ–Ū∂ŗ—–ĺŅ∂‘őů≤ÓĶńłų÷÷”įŌž“ÚňōĹÝ––Ńň∑÷őŲ,Ķę√Ľ”–…śľįłų÷÷“ÚňōĶń÷ųīőĻōŌĶ£¨”…”ŕ’‚–©”įŌž“Úňō∂ŗ«“łī‘”£¨«“ żĺ›ņŽ…Ę£¨ń—“‘ĹÝ–– żņŪÕ≥ľ∆£¨Ľ“…ęņŪ¬Ř÷–Ľ“ĻōŃ™∑÷őŲŅ…“‘∂‘”–ŌřĶń°ĘĪŪ√śőřĻś¬…Ķń żĺ›ĹÝ––ī¶ņŪ£¨’“ĶĹŐĹ≤‚Ļż≥Őłų“ÚňōĶńŌŗĽ•ĻōŌĶ°£Ľ“ĻōŃ™∑÷őŲĽýĪĺňľ¬∑ «ľ∆ň„ŌĶÕ≥Őō’ųĪšŃŅ żĺ›–ÚŃ–”ŽŌŗĻō“ÚňōĪšŃŅ żĺ›–ÚŃ–÷ģľšĶńĻōŃ™∂»£¨Ķ√≥Ųłų”įŌž“ÚňōĶń”įŌž≥Ő∂»£¨»∑∂®”įŌž“ÚňōĶń÷ųīőĻōŌĶ[11-12]°£
‘ŕŐĹ≤‚Ļż≥Ő÷–£¨īś‘ŕĶńłų÷÷”įŌž“Úňō÷ĪĹ”Ķľ÷¬ŐĹ≤‚Ļż≥Ő≤Ľ»∑∂®ļÕĹŠĻŻ ß’ś°£‘ŕ Ķľ ≤Ŕ◊ų÷–£¨≤Ľń‹∂‘√ŅłŲ”įŌž“Úňō∂ľĹÝ––Ņō÷∆£¨»ę≤ŅľŗŅōĽŠĶľ÷¬»ňѶ°ĘőÔѶĶńņň∑—£¨ĽŠĶľ÷¬Ļ§◊ų≥Ő–Ú∑ĪňŲ£¨”įŌžĻ§◊ųĹÝ∂»£ĽŃŪ“Ľ∑Ĺ√ś£¨≤Ľ «ňý”–Ķń“Úňō∂ľĽŠ∂‘ŐĹ≤‚ĹŠĻŻ≤ķ…ķ÷ōīů”įŌž£ļ“Úīň£¨ ◊Ō»–Ť“™∑÷őŲ∂‘ŐĹ≤‚ĺę∂»≤ķ…ķ”įŌžĶńĻōľŁőů≤Ó£¨»Ľļů ∂Īū”įŌž’‚–©ĻōľŁőů≤ÓĶń“Úňōľį÷ųīőĻōŌĶ£¨īÔĶĹĻśĪ‹≤ĽņŻ“Úňō°ĘŐŠłŖŐĹ≤‚ĺę∂»ĶńńŅĶń°£
1.1 ĻōľŁőů≤ÓĶń ∂Īū
Ļ”√CMSŐĹ≤‚“«∂‘∂¨ĻŌ…ĹÕ≠Ņů°Ęį≤«žÕ≠Ņů°ĘĻ„∂ę∑≤ŅŕŅůļÕĻ„őųÕ≠Ņ”ŅůĶ»Ņů…ĹĶńĹŁ100łŲ≤…≥°ĹÝ––ŐĹ≤‚£¨∆š÷–”–≤Ņ∑÷Ņ’«Ý”…≤ĽÕ¨Ķń≤Ŕ◊ų»ň‘Ī”√≤ĽÕ¨Ķń…ŤĪł(–¬ĺ……ŤĪł)ĹÝ––∂ŗīőŐĹ≤‚£¨ņŘĽżŃňīůŃŅĶńŅ’«Ý żĺ›°£”įŌžŅ’«ÝŐĹ≤‚ĺę∂»Ķńőů≤Ó÷ų“™ŐŚŌ÷‘ŕ£ļľ§Ļ‚Ķ„‘∆÷–ĶńĽĶĶ„°ĘőřĺŗņŽĶ„£Ľ’Ōį≠őÔĶń’ŕĶ≤Ķľ÷¬Ķń√§«Ý£ĽĶ„‘∆ń£–ÕĶńňģ∆Ĺ«„–ĪļÕ≤ŗŌÚ«„–ĪĶ»°£ĺŖŐŚőů≤Ó≥ŲŌ÷łŇ¬ Õ≥ľ∆ĹŠĻŻľŻĪŪ1°£
”…ĪŪ1Ņ…ľŻ£ļŅ’«ÝŐĹ≤‚÷–÷ų“™őů≤ÓŐŚŌ÷‘ŕĽĶĶ„°ĘőřĺŗņŽĶ„ļÕń£–ÕĶńňģ∆Ĺ«„–Ī’‚3÷÷ņŗ–Õ…Ō£¨∆š÷–£¨ĽĶĶ„ļÕőřĺŗņŽĶ„Õ≥“ĽŅī≥…Ķ„‘∆ żĺ›÷–Ķń‘Ž…ýĶ„£¨”…īň»∑∂®ŃĹņŗĻōľŁőů≤Óľī‘Ž…ýĶ„ļÕń£–Õňģ∆Ĺ«„Ĺ«őů≤Ó°£
ĪŪ1 őů≤ӳҬ Õ≥ľ∆
Table 1 Probability of each error

1.2 ”įŌž“Úňō ∂Īū”ŽŌŗĻō–‘∑÷őŲ
‘ŕŐĹ≤‚Ļż≥Ő÷–£¨őů≤Ó”įŌž“Úňō÷ų“™ņī‘ī”ŕ3łŲ∑Ĺ√ś[13-16]£ļ
(1) …ŤĪłőů≤Ó°£įŁņ®£ļ…®√ŤĶÁĽķ∑«ĺý‘»◊™∂ĮĶľ÷¬Ĺ«ňŔ∂»≤‚ŃŅ…Ō≤ķ…ķĹ«∂»őů≤Ó£¨–≥’ŮĻ‚¬∑Ķń’Ř…šŌĶ żĶńłųŌÚ“ž–‘£¨…®√ŤÕ∑ňģ∆ĹĶųŃ„≤ĽĶĹőĽ£¨ļ§ń Ķ»ņŽ◊”‘ྦྷĻ‚Ļ‹÷–ĶńŃų∂Į°ĘĹť÷ ņ©…ĘĶńłųŌÚ“ž–‘Ķ»īÝņīĶń…®√ŤĶ„Ķń∆Į“∆£Ľ…®√ŤÕ∑–ż◊™Ĺ«őů≤Ó£¨ľ§Ļ‚Ĺť÷ Ķń◊‘∑Ę…šľįĽķ–Ķ∂∂∂ĮīÝņīĶńĶ„‘Ž…ý°£
(2) »ňő™őů≤Ó£¨įŁņ®ŐĹ≤‚…ŤĪłľ‹…Ť°Ę…ŤĪł≥ű ľĽĮ°ĘőÔņŪ≤ő ż…Ť∂®≤ķ…ķĶńőů≤Ó°£
(3) Ľ∑ĺ≥”įŌž£¨»Áő¬∂»°Ę ™∂»°Ę∑Ř≥ĺŇ®∂»°Ęőß—“ Ű–‘£ĽīňÕ‚£¨ľ§Ļ‚ŇŲĶĹňģ÷ťļÕ–Łł°ŅŇŃ£ĽŠ≤ķ…ķ∆ęņŽīę š∑ĹŌÚĶńŌ÷Ōů£Ľ’Ōį≠őÔ∂‘ľ§Ļ‚…®√ŤŌŖĶń’ŕĶ≤£Ľňģ∂‘ľ§Ļ‚ĶńőŁ ’◊ų”√£¨į—ľ§Ļ‚ĶńĻ‚◊”ń‹ŃŅ◊™ĽĮő™ĽĮ—ß ∆ń‹°Ę»»∂Įń‹Ķ»£¨Ķľ÷¬ľ§Ļ‚ň•ľűĹŌīů°£
“‘Ķ„‘∆ żĺ›÷–‘Ž…ýĶ„’‚łŲĻōľŁőů≤Óő™ņż£¨Ľý”༓…ęĻōŃ™∑÷őŲ∑®£¨∂‘ Ļ”√CMSŐĹ≤‚“«ĽŮ»°ĶńŅ’«Ý żĺ›ĹÝ––∑÷őŲ£¨≤Ĺ÷Ť»ÁŌ¬°£
(1) ∂‘m◊ť żĺ›ĹÝ––∑÷őŲ£¨ĻĻĹ®‘Ž…ýĶ„’‚łŲĻōľŁőů≤Ógi(m)ĶńŐō’ų“Úňōĺō’ůP£¨ľŔ…Ť≥ű ľĺō’ůő™

Ĺ÷–£ļnő™∂‘ĻōľŁőů≤Ógi(m)Ķń”įŌž“ÚňōĶńłŲ ż£Ľmő™—ýĪĺ ż£ĽPnmő™√Ņīő Ķ≤‚ żĺ›÷–∂‘”¶≤ő ż°£
(2) ∂‘ņķ ∑ żĺ›ĹÝ––ŃŅĽĮ∑÷őŲ£¨Õ®Ļż≥ű ľĽĮ£¨◊™ĽĮ≥… żŃŅľ∂ŌŗĶĪĶńőřŃŅłŔ żĺ›£¨Pij(i=1£¨2£¨°≠£¨n£Ľj=1£¨2£¨°≠£¨m)ő™Ī»ĹŌ–ÚŃ–£¨P1j(j=1£¨2£¨°≠£¨m)ő™≤őŅľ–ÚŃ–£¨łýĺ›CMS”√Ľß ÷≤Š÷–ĪÍ◊ľ÷Ķ»∑∂®£¨ľ∆ň„Ļę Ĺő™
 (1)
(1)
(3) «ů≤Ó–ÚŃ–£ļ°ųi(k)=|x0(k)-xi(k)|°£∆š÷–£ļk=0£¨1£¨2£¨°≠£¨q°£
(4) «ůŃĹľ∂◊Óīů≤ÓļÕ◊Ó–°≤Ó£ļM=maxi[maxk¶§i(k)]£¨N= mini[mink°ųi(k)]°£
(5) «ůĻōŃ™ ż £¨
£¨ °£
°£
(6) «ůĻōŃ™∂» °£
°£
Õ¨ņŪ£¨Ņ…“‘»∑∂®∆šňŻŅ’«ÝŐĹ≤‚ĺę∂»ĻōľŁőů≤Ó”Ž∆š∂‘”¶Ķń”įŌž“Úňōľį∆šĻōŃ™∂»°£
2 őů≤Ó–ř’ż∑Ĺ∑®
ŐĹ≤‚őů≤ÓĶń–ř’żĻōŌĶĶĹļů–ÝŅ’«Ý»żő¨Ĺ®ń£Ķńĺę»∑–‘£¨ĹÝ∂Ý”įŌžĶĹĽō≤……Ťľ∆°Ę≥šŐÓļÕĶō—ĻŅō÷∆Ķ»ŌĶŃ–Ļ§◊ų£¨ «ŐĹ≤‚ żĺ›ī¶ņŪĶń÷ō“™≤Ĺ÷Ť°£
2.1 ń£–Õ«„Ĺ«–ř’ż
ń£–Õ«„Ĺ«őů≤Ó÷ų“™”–ňģ∆Ĺ«„Ĺ«ļÕ≤ŗŌÚ«„Ĺ«2÷÷£¨łýĺ›őńŌ◊[2]£¨≤…Ņ’«Ý…®√ŤĺŗņŽ“Ľį„≤Ľ≥¨Ļż100 m£¨…®√ŤÕ∑–ż◊™Ĺ«őů≤Ó“Ľį„–°”ŕ0.1£¨∂‘≤ŗŌÚĺŗņŽ”įŌž≤Ľ≥¨Ļż0.1 m£¨“Úīň£¨÷ų“™«„Ĺ«őů≤ÓŐŚŌ÷‘ŕňģ∆Ĺ∑ĹŌÚ…Ō°£
…ŤŐĹ≤‚łň…Ō2łŲĪÍ ∂Ķ„≤‚Ķ„1ļÕ≤‚Ķ„2£¨≤‚Ķ„1łŁŅŅĹŁ…®√ŤÕ∑£¨◊ÝĪÍ∑÷Īūő™(X1£¨Y1£¨Z1)£¨(X2£¨Y2£¨Z2)£¨‘Ú÷ß≥Ňłň Ķľ «„Ĺ«¶»°šő™
 (2)
(2)
īķ»ŽŐĹ≤‚Ķń‘≠ ľń£–Õ«„Ĺ«Ļę ĹĶ√£ļ
 (3)
(3)
Ĺ÷–£ļ¶»ő™÷ß≥Ňłň«„Ĺ«£Ľrő™÷ß≥Ňłň–ż◊™Ĺ«£Ľy£¨h£¨xļÕcő™…®√ŤÕ∑≥ű ľĽĮĶų’Ż≤ő ż(Ņ…”…√ŅīőŐĹ≤‚ļůĶń…ŤĪłľ«¬ľőńľĢĽŮĶ√)°£Ņ…“‘ľ∆ň„≥Ų Ķľ ĶńyļÕh∂‘ń£–Õňģ∆Ĺ«„Ĺ«ĹÝ–––ř’ż°£
2.2 ‘Ž…ýĶ„…ĺ≥ż
łýĺ›…®√ŤĻžľ£«ķŌŖ…ŌĶ„”ŽĶ„÷ģľšĶńÕō∆ňĻōŌĶ“‘ľį∂ĢĹ◊ľłļőѨ–Ý–‘Ķń∂®“Ś£¨»∑ŃĘłīļŌŇ–ĺ›£ļŌ“ľ–Ĺ«ļÕŌ“łŖĪ»[10]°£ĶĪ żĺ›Ķ„∑ŻļŌł√Ň–ĺ› Ī£¨‘ÚĪĽ»∑∂®ő™‘Ž…ýĶ„£¨ĹęĪĽ…ĺ≥ż°£
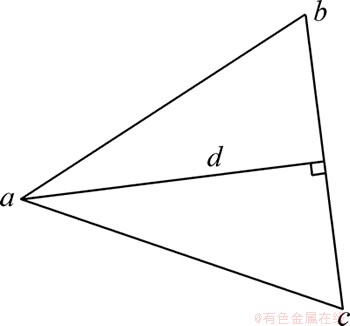
Ō“ľ–Ĺ«ľ∆ň„∑Ĺ∑®£ļ…Ť…®√Ť»¶3łŲŌŗŃŕĶ„Ķ„piľį«į°Ęļů2Ķ„pi-1ļÕpi+1£¨ĪŖpi-1pi”ŽĪŖpipi+1Ѩ≥…Ķń2ŐűĪŖ–ő≥…Ķńľ–Ĺ«÷–—į’“–°”ŕ„–÷Ķ(¶Ň1)ĶńĹ«£¨…Ť»żĹ«–ő(a£¨b£¨c)£¨ŌÚŃŅA=a-c£¨ŌÚŃŅB=b-c(ľŻÕľ1)°£
łýĺ›ŌÚŃŅĶ„ĽżĶń∂®“Ś£¨ŌÚŃŅAļÕBĶńĶ„ĽżĶ»”ŕŌÚŃŅń£|A|ļÕ|B|”Žľ–Ĺ«q Ķń”ŗŌ“Ķń≥ňĽż£¨ľī


Õľ1 Ō“ľ–Ĺ« ĺ“‚Õľ
Fig. 1 Schematic diagram of angle of chords
”–
 (4)
(4)
”… Ĺ(4)Ņ…÷™£ļÕ®ĻżŌÚŃŅAļÕBĶńx£¨yļÕz◊ÝĪÍŅ…«ů≥Ųľ–Ĺ«Ķń”ŗŌ“£¨∂ÝŌÚŃŅAļÕBĶńx£¨yļÕz◊ÝĪÍ «łýĺ›3łŲ∂•Ķ„Ķńx£¨yļÕz◊ÝĪÍ«ů≥Ų°£“Úīň£¨Õ®Ļż»żĹ«–ő3łŲ∂•Ķ„Ķńx£¨yļÕz◊ÝĪÍ£¨Ņ…“‘ľ∆ň„ľ–Ĺ«Ķń”ŗŌ“£¨ĹÝ∂ÝŅ…“‘Õ®Ļżľ–Ĺ«ņī»∑∂®‘Ž…ýĶ„ĶńőĽ÷√°£
Ō“łŖĪ»ľ∆ň„∑Ĺ∑®£ļ…ŤĶ„piľį«į°Ęļů2Ķ„pi-1ļÕpi+1£¨ľ∆ň„ľž≤ťĶ„piĶĹѨŌŖpi-1pi+1ĶńĺŗņŽdi£¨»Ű|di/di-1|°›¶Ň2(¶Ň2ő™„–÷Ķ)£¨‘Ú»Ōő™piĶ„ «‘ŽĶ„°£
ľ∆ň„Ļę Ĺ»ÁŌ¬£ļ»żĹ«–ő(a£¨b£¨c)£¨…ŤŌÚŃŅA=b-a£¨ŌÚŃŅC=c-a(ľŻÕľ2)°£
“Ú
”–
 (5)
(5)
”… Ĺ(4)Ķ√≥Ų√ŅłŲĶ„ĶńŌ“łŖ£¨ĹÝ∂ÝŅ…Ķ√≥Ų«į°Ęļů2Ķ„ĶńŌ“łŖĪ»£¨”Ž„–÷ĶĪ»ĹŌ»∑∂®‘Ž…ýĶ„°£
Õľ2 Ō“łŖ ĺ“‚Õľ
Fig. 2 Schematic diagram of hight of chord
3 ”¶”√
Ļ„∂ę∑≤ŅŕŅů «Ļķńŕ¬Ů≤ōĹŌ…ÓĶńŐōīů–ÕŅů…Ĺ£¨ĺģŌ¬ŐűľĢłī‘”£¨ī”2006ńÍŅ™ ľ£¨Ń¨–Ý∂‘∆šŅ™≤…ļůĶń≤…≥°ĹÝ––ŐĹ≤‚£¨ŐĹ≤‚ĹŠĻŻĺŖ”–ĹŌ«ŅĶńĶš–Õ–‘°£‘ŕŐĹ≤‚Ļż≥Ő÷–£¨÷ų“™”–10–°ņŗ”įŌž“Úňō£ļő¬∂»°Ę ™∂»°Ę∑Ř≥ĺŇ®∂»°Ę÷ß≥Ňłň«„Ĺ«°Ę…®√ŤÕ∑«„Ĺ«°Ę…®√ŤÕ∑–ż◊™Ĺ«°Ę–Ň‘ŽĪ»°ĘńŅĪÍ∑ī…š¬ °Ę…ŤĪłŅ…ŅŅ–‘°Ę»ňő™“Úňō£¨Ņ’«ÝŐĹ≤‚÷–£¨’‚10–°ņŗ”įŌž“ÚňōĻĻ≥…ŌÚŃŅP◊ųő™—ýĪĺ£¨ľ«◊ųP=[pi1£¨pi2£¨°≠£¨pi10]T°£
3.1 Ķ•“Úňō∑÷őŲ
3.1.1 ‘Ž…ýĶ„”įŌž“Úňō∑÷őŲ
ĪŪ2ňý ĺő™∑Ř≥ĺŇ®∂»°Ę ™∂»°Ęő¬∂»°Ę–Ň‘ŽĪ»ļÕńŅĪÍ∑ī…š¬ ’‚5÷÷“Úňō∂‘‘Ž…ýĶ„(įŁņ®ĽĶĶ„ļÕőřĺŗņŽĶ„)Ķń”įŌž°£
ĪŪ2 ≤Ņ∑÷“Úňō∂‘‘Ž…ýĶ„Ķń”įŌž
Table 2 Impact factor for noise error

∂‘’‚5łŲ”įŌž“ÚňōĹÝ––Ľ“…ęĻōŃ™∑÷őŲ£¨ĹŠĻŻľŻĪŪ3°£
”…ĪŪ3Ņ…ľŻ£ļ∂‘‘Ž…ýĶ„Ķń”įŌž“ÚňōĻōŃ™∂»ŇŇ–Ú”…īůĶĹ–°ő™∑Ř≥ĺŇ®∂»°Ę ™∂»°Ęő¬∂»°ĘńŅĪÍ∑Ň…š¬ ļÕ–Ň‘ŽĪ»°£”įŌž‘Ž…ýĶ„ĶńĻōľŁ“Úňōő™∑Ř≥ĺŇ®∂»°Ę ™∂»ļÕő¬∂»£¨∂ÝļůŃĹ’Ŗ «īő“™“Úňō°£
3.1.2 «„Ĺ«”įŌž“Úňō∑÷őŲ
ĪŪ4ňý ĺő™÷ß≥Ňłň«„Ĺ«°Ę…®√ŤÕ∑«„Ĺ«°Ę…®√ŤÕ∑–ż◊™Ĺ«»ż“Úňō∂‘ń£–Õňģ∆Ĺ«„Ĺ«Ķń”įŌž°£
∂‘ń£–Õňģ∆Ĺ«„Ĺ«Ķń3łŲ”įŌž“ÚňōĹÝ––Ľ“…ęĻōŃ™∑÷őŲ£¨ĹŠĻŻľŻĪŪ5°£
”…ĪŪ5Ņ…ľŻ£ļ∂‘ń£–Õ«„Ĺ«Ķń”įŌžŃ¶”…īůĶĹ–°ň≥–Úő™…®√ŤÕ∑«„Ĺ«°Ę÷ß≥Ňłň«„Ĺ«°Ę…®√ŤÕ∑–ż◊™Ĺ«°£∆š÷–…®√ŤÕ∑«„Ĺ«Ķń”įŌžĹŌīů£¨ŐōĪū «ĶĪ…®√ŤÕ∑Ķń◊‘∂ĮĶųňģ∆ĹĻ¶ń‹≤ķ…ķ∆ę≤Ó Ī£¨ĽŠ∑Ňīů…®√ŤŌŖ‘∂∂ňĶ„ĶńłŖ≥Őőů≤Ó°£
3.2 ∂ŗ“Úňō∂‘Ī»∑÷őŲ
≤…Ņ’«ÝŐĹ≤‚ĺę∂» ‹ĶĹĽ∑ĺ≥“Úňō°Ę…ŤĪł“ÚňōļÕ»ňő™“ÚňōĶń”įŌž£¨’ŻņŪĻ§≥Ő żĺ›£¨∑÷3÷÷«ťŅŲĹÝ––őů≤Ó∂ŗ“Úňō∂‘Ī»∑÷őŲ£ļ(1) ń≥“Ľ Īľš∂ő Ļ”√…ŤĪłA∂‘10łŲŅ’«ÝĹÝ––ŐĹ≤‚(“‘Ľ∑ĺ≥“Úňōő™÷łĪÍ)£Ľ(2) ‘ŕÕ¨“Ľ Īľš∂ő£¨Ķŕ2◊ť Ķ—ť»ň‘Ī Ļ”√…ŤĪłA∂‘ŌŗÕ¨ĶńŅ’«ÝĹÝ––ŐĹ≤‚(“‘Ľ∑ĺ≥“ÚňōļÕ»ňő™“Úňōő™÷łĪÍ)£Ľ(3) ‘ŕÕ¨“Ľ Īľš∂ő£¨Ķŕ2◊ť Ķ—ť»ň‘Ī Ļ”√…ŤĪłB£¨∂‘Ņ’«ÝĹÝ––ŐĹ≤‚(“‘Ľ∑ĺ≥“Úňō°Ę…ŤĪł“ÚňōļÕ»ňő™“Úňōő™÷łĪÍ£¨∆š÷–…ŤĪłBő™ņŌ…ŤĪł£¨…ŤĪłAő™–¬…ŤĪł)°£
ĪŪ3 ‘Ž…ý”įŌž“ÚňōĻōŃ™∂»ľ∆ň„ĹŠĻŻ
Table 3 Correlation degree of affecting factor of noise

ĪŪ4 ≤Ņ∑÷“Úňō∂‘ń£–Õ«„Ĺ«Ķń”įŌž
Table 4 Affecting factor for inclination error (°„)

ĪŪ5 ń£–Õ«„Ĺ«łų“ÚňōĻōŃ™∂»ľ∆ň„ĹŠĻŻ
Table 5 Correlation degree of affecting factor of inclination error

ŐĹ≤‚ĹŠ Ýļů∂‘ĽŮ»°Ķń10łŲŅ’«ÝĶńĶ„‘∆ żĺ›ĹÝ––∑÷őŲ£¨∑÷Īū∂‘‘Ž…ýĶ„ļÕń£–Õňģ∆Ĺ«„Ĺ«2łŲŐō’ų Ű–‘ĹÝ––Õ≥ľ∆£¨∂‘Ī»Ľ∑ĺ≥“Úňō£¨Ľ∑ĺ≥“ÚňōļÕ…ŤĪł“Úňō£¨Ľ∑ĺ≥“Úňō°Ę…ŤĪł“ÚňōļÕ»ňő™“Úňō3÷÷ŐűľĢŌ¬Ķń‘Ž…ýĶ„£¨Ī»ĹŌĹŠĻŻľŻÕľ3ļÕÕľ4°£
”…Õľ3Ņ…ľŻ£ļŅľ¬«Ľ∑ĺ≥“ÚňōļÕ»ňő™“Úňō Ī£¨‘Ž…ýĶ„Ķń żńŅĪšĽĮ≤Ľīů£Ľ◊ŘļŌŅľ¬«3łŲ÷łĪÍ Ī£¨‘Ž…ýĶ„ żńŅŌ‘÷Ý‘Ųľ”°£’‚ĪŪ√ųő»∂®Ņ…ŅŅĶń…ŤĪłŅ…“‘”––ßľű…Ŕ‘Ž…ýĶ„Ķń≤ķ…ķ°£
”…Õľ4Ņ…ľŻ£ļ◊ŘļŌŅľ¬«3÷÷«ťŅŲ Ī£¨ń£–Õňģ∆Ĺ«„Ĺ«őů≤Ó∂ľ”–“Ľ∂®≥Ő∂»ĶōĪšīů£¨Ķę‘Ųľ”∑ý∂»ĹŌĺýļ‚£¨ĪŪ√ųń£–Õňģ∆Ĺ«„Ĺ«Ķń≤ķ…ķ÷ų“™”……®√ŤÕ∑◊‘∂ĮĶų’Ż≤ĽĶĹőĽ“ż∆ū£¨ ‹Ľ∑ĺ≥ļÕ»ňő™Ķń“Úňō”įŌž≤ĽŌ‘÷Ý°£

Õľ3 ‘Ž…ýĶ„∂ŗ“Úňō∑÷őŲ
Fig. 3 Multifactor analysis of noise error

Õľ4 «„Ĺ«őů≤Ó∂ŗ“Úňō∑÷őŲ
Fig. 4 Multifactor analysis of inclination error
3.3 ”¶”√ Ķņż
łýĺ› Ĺ(2)ļÕ(3)∂‘Ņ’«ÝSH-600N«„Ĺ«≤ő żĹÝ––Ķų’Ż£¨ľŻĪŪ6°£
ňģ∆Ĺ«„Ĺ«–ř’ż«į°Ęļů∂‘Ī»ĹŠĻŻ»ÁÕľ5ňý ĺ°£–ř’żļůń£–ÕŌ‘ ĺ£¨≤…≥°”“∂ň∂•įŚ◊ÓłŖĶ„Z◊ÝĪÍŌ¬ĹĶ1.92 m£¨łŁ∑ŻļŌ≤…≥° Ķľ «ťŅŲ°£
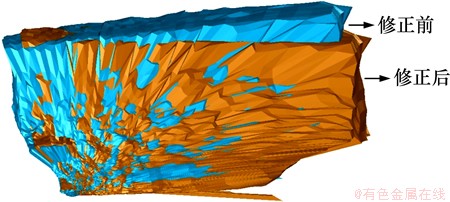
łýĺ› Ĺ(4)ļÕ(5)£¨∂‘SH-400S10Ņ’«ÝĹÝ––‘Ž…ýĶ„…ĺ≥ż£¨„–÷Ķ¶Ň1…Ť∂®ő™4.5°„£¨¶Ň2…Ť∂®ő™1.4£¨Ķ„‘∆ żĺ›‘≠ ľĻžľ£ŌŖļÕĺ≠ĻżĻż¬ňň„∑®ī¶ņŪļůĶńĻžľ£ŌŖ‘ŕĹ®ń£»ŪľĢ÷–∂‘Ī»–ßĻŻ»ÁÕľ6ļÕÕľ7ňý ĺ£¨Ļ≤”–15łŲ“ž≥£Ķ„ĪĽ…ĺ≥ż°£Õľ6ňý ĺő™…ł—°≥ŲņīĶń≤Ņ∑÷‘Ž…ýĶ„£¨Õľ7ňý ĺő™–ř’żļůĶńĻžľ£ŌŖÕľ°£–ř’żļůĶńń£–ÕŐŚĽż‘Ųľ”31 m3£¨-570 mĪÍłŖ“‘…Ō∂•įŚĪ©¬∂√śĽżľű…Ŕ89 m2£¨łŁľ”∑ŻļŌŅ’«ÝĶń Ķľ ĪŖĹÁ«ťŅŲ°£
Õľ5 SH-600NŐĹ≤‚ń£–Õ«„Ĺ«őů≤Ó–ř’ż«įļů∂‘Ī»
Fig. 5 Comparison of modified before and after of SH-600N
ĪŪ6 SH-600Nń£–Õňģ∆Ĺ«„Ĺ«Ķų’Ż≤ő ż
Table 6 Parameter adjusting of horizontal angle of SH-600N


Õľ6 Ņ’«ÝSH-400S10‘Ž…ýĶ„…ĺ≥ż«į
Fig. 6 Model before removing noise of SH-400S10

Õľ7 Ņ’«ÝSH-400S10‘Ž…ýĶ„…ĺ≥żļů
Fig. 7 Model after removing noise of SH-400S10
4 ĹŠ¬Ř
(1) √ų»∑≤…Ņ’«Ýľ§Ļ‚ŐĹ≤‚Ķń2łŲĻōľŁőů≤Ó£ļ‘Ž…ýĶ„ļÕŐĹ≤‚ń£–Õňģ∆Ĺ«„Ĺ«őů≤Ó°£‘Ž…ýĶ„÷ų“™”įŌž“ÚňōľįŌŗĻō≥Ő∂»”…īůĶĹ–°ň≥–Úő™∑Ř≥ĺŇ®∂»°Ę ™∂»°Ęő¬∂»°ĘńŅĪÍ∑ī…š¬ °Ę–Ň‘ŽĪ»°£«„Ĺ«őů≤Ó”įŌž“ÚňōľįŌŗĻō≥Ő∂»”…īůĶĹ–°ň≥–Úő™…®√ŤÕ∑«„Ĺ«°Ę÷ß≥Ňłň«„Ĺ«°Ę…®√ŤÕ∑–ż◊™Ĺ«°£
(2) ◊ŘļŌĽ∑ĺ≥“Úňō°Ę…ŤĪł“ÚňōļÕ»ňő™“ÚňōĶń”įŌžĹÝ––őů≤Ó∂ŗ“Úňō∂‘Ī»∑÷őŲ£¨‘Ž…ýĶ„őů≤Ó ‹»ż“Úňō”įŌžŌ‘÷Ý£¨∂Ýń£–Õňģ∆Ĺ«„Ĺ«őů≤Ó ‹…ŤĪłĶ•“Úňō”įŌžŌ‘÷Ý£¨’‚ő™Ņů…Ĺ≤…Ņ’«ÝĶńļů–ÝŐĹ≤‚°ĘŐŠłŖĺę∂»°ĘĻśĪ‹őů≤ÓŐŠĻ©÷ß≥÷°£
(3) ŐŠ≥ŲŃň«„Ĺ«őů≤Ó–ř’żĻę ĹļÕőů≤ÓĶ„Ķń ∂ĪūŇ–ĺ›”Ž…ĺ≥ż∑Ĺ∑®£¨–ř’żļůĶń≤…Ņ’«ÝĪŖĹÁĪÍłŖ°ĘŐŚĽż°Ę∂•įŚĪ©¬∂√śĽżĶ»≤ő żłŁ∑ŻļŌ Ķľ «ťŅŲ°£
≤őŅľőńŌ◊£ļ
[1] ¬ř÷‹»ę, ¬Ļļ∆, ‘¨Ĺŕ∆Ĺ, Ķ». Ĺū ŰŅů≤…Ņ’«Ýĺę√‹ŐĹ≤‚”Ž»żő¨Ĺ®ń£ľľ ű[J]. ļĢńŌŅ∆ľľīů—ß—ßĪ®(◊‘»ĽŅ∆—ßįś), 2008, 23(3): 83-87.
LUO Zhouquan, LU Hao, YUAN Jieping, et al. Metal mine°Įs mined-area precise survey and 3d modeling technology[J]. Journal of Hunan University of Science & Technology (Natural Science Edition), 2008, 23(3): 83-87.
[2] ŃűŌĢ√ų, ¬ř÷‹»ę, ’ŇĪ£, Ķ». CMSŅ’«ÝŐĹ≤‚ĶńĽ∑ĺ≥”įŌžľįőů≤Ó∑÷őŲ”Žĺņ’ż[J]. Ņů“ĪĻ§≥Ő, 2008, 28(4): 1-5.
LIU Xiaoming, LUO Zhouquan, ZHANG Bao, et al. Environmental impact on cavity monitoring system and its error analysis & correction[J]. Mining and Metallurgical Enginaeering, 2008, 28(4): 1-5.
[3] Coveney S, Fotheringham A S. Terrestrial laser scan error in the presence of dense ground vegetation[J]. Photogrammetric Record, 2011, 26(135): 307-324.
[4] Isheil A, Gonnet J P, Joannic D, et al. Systematic error correction of a 3D laser scanning measurement device[J]. Optics and Lasers in Engineering, 2011, 49(1): 16-24.
[5] Hodge R A. Using simulated terrestrial laser scanning to analyse errors in high-resolution scan data of irregular surfaces[J]. Journal of Photogrammetry and Remote Sensing, 2010, 65(2): 227-240.
[6] Palamara D R, Nicholson M, Flentje P, et al. An evaluation of airborne laser scan data for coalmine subsidence mapping[J]. International Journal of Remote Sensing, 2007, 28(15): 3181-3203.
[7] Xi F, Liu Y, Feng H Y. Error compensation for three-dimensional line laser scanning data[J]. International Journal of Advanced Manufacturing Technology, 2001, 18(3): 211-216.
[8] Ńű√ų÷‹, ŃŤŌ»ĹŅ, ĹĮ‘Ų«Ņ, Ķ». Ľý”ŕSOVĶńĽķ–Ķ≤ķ∆∑◊įŇšĻż≥Ő÷ ŃŅ“ÚňōŮÓļŌń£–Õ[J]. ◊ťļŌĽķī≤”Ž◊‘∂ĮĽĮľ”Ļ§ľľ ű, 2011(10): 27-31.
LIU Mingzhou, LING Xianjiao, JIANG Zengqiang, et al. Quality factor coupling model based on sov in machining assembly process[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2011(10): 27-31.
[9] Ōń”ņĽ™, ∑Ĺ‘ī√Ű, ňÔļÍ…ķ, Ķ». »żő¨ľ§Ļ‚ŐĹ≤‚ŌĶÕ≥‘ŕ≤…Ņ’«Ý≤‚ŃŅ÷–Ķńőů≤Ó∑÷őŲ”Ž–£’ż[J]. ≤‚ĽśÕ®Ī®, 2009(9): 18-21.
XIA Yonghua, FANG Yuanmin, SUN Hongsheng, et al. Error analysis and calibration of 3d laser monitoring system survey in finished stopes[J]. Bulletin of Surveying and Mapping, 2009(9): 18-21.
[10] ¬ř’ÍžÕ. Ľý”ŕCMSŐĹ≤‚Ķń≤…Ņ’«Ý»żő¨Ņ… ”ĽĮŌĶÕ≥—–ĺŅ[D]. ≥§…≥: ÷–ńŌīů—ß◊ ‘ī”Žį≤»ęĻ§≥Ő—ß‘ļ, 2010: 8-17.
LUO Zhenyan, The research of goaf°Įs 3d visual system based on cms detection[D]. Changsha: Central South University. School of Resources and Safety Engineering, 2010: 8-17.
[11] Ľ∆Ó», ĻňĻķĽ™, ļőőįĽý, Ķ». –°≤®ĪšĽĽň„∑®‘ŕ¬Ų≥Śľ§Ļ‚≤‚ĺŗ÷–Ķń”¶”√[J]. ľ§Ļ‚”ŽļžÕ‚, 2011, 41(8): 845-850.
HUANG Zhao, GU Guohua, HE Weiji, et al. Application of wavelet transformation algorithm in pulse laser ranging[J]. Laser & Infrared, 2011, 41(8): 845-850.
[12] ő°‘ňŇŰ, ∑Ĺőį–¬. X…šŌŖ≤‚ļŮ“«≤‚ŃŅĺę∂»”įŌž“Úňōľį≤Ļ≥•īŽ ©[J]. ◊‘∂ĮĽĮ“«ĪŪ, 2011, 32(10): 79-82.
WEI Yunpeng, FANG Weixin. Factors influencing measurement accuracy of x-ray thickness gauge and appropriate compensation measures[J]. Process Automation Instrumentation, 2011, 32(10): 79-82.
[13] –žŐőŃķ, “¶į≤Ń÷, ‘ÝŌťĻķ, Ķ». Ľý”༓…ęĻōŃ™∑÷őŲĶńLNGĹ” ’÷’∂ň»ň“Ú ¬Ļ Īś ∂∑Ĺ∑®[J]. ÷–Ļķį≤»ę…ķ≤ķŅ∆—ßľľ ű, 2011, 7(9): 97-103.
XU Taolong, YAO Anlin, ZENG Xiangguo, et al. Human accidents identification method of lng receiving terminal based on grey relational analysis[J]. Journal of Safety Science and Technology, 2011, 7(9): 97-103.
[14] –‹ŃĘ–¬, ¬ř÷‹»ę. Ľý”ŕVRMLĶń≤…Ņ’«Ý–ŇŌĘĻ‹ņŪŌĶÕ≥ĶńŅ™∑Ę[J]. Ņ∆ľľĶľĪ®, 2012, 30(1): 48-52.
XIONG Lixin, LUO Zhouquan. Research on management system of goaf information based on VRML[J]. Science & Technology Review, 2012, 30(1): 48-52.
[15] Tung H T, Kuang C F. Calibration and analysis of eccentric error of the laser rotary-scanning measurement system[J]. Measurement, 2012, 45(1): 47-53.
[16] ÕűĹ®ĺŁ, –žŃĘĺŁ, ņÓ–°¬∑. ◊ňըū»Ň∂Į∂‘Ľķ‘ōľ§Ļ‚ņ◊īÔĶ„‘∆ żĺ›Ķń”įŌž[J]. “«∆ų“«ĪŪ—ßĪ®, 2011, 32(8): 1181-1189.
WANG Jianjun, XU Lijun, LI Xiaolu, et al. Impacts of attitude deviations on laser point cloud of airborne LiDAR[J]. Chinese Journal of Scientific Instrument, 2011, 32(8): 1181-1189.
(Īŗľ≠ —Ó”◊∆Ĺ)
’łŚ»’∆ŕ£ļ2013-05-25£Ľ–řĽō»’∆ŕ£ļ2013-09-10
ĽýĹūŌÓńŅ£ļĻķľ“◊‘»ĽŅ∆—߼ýĹū◊ ÷ķŌÓńŅ(51274250)£Ľ°į ģ∂ĢőŚ°ĪĻķľ“Ņ∆ľľ÷ß≥Ňľ∆ĽģŌÓńŅ(2012BAK09B02-05)
Õ®–Ň◊ų’Ŗ£ļ¬ř÷‹»ę(1966-)£¨ń–£¨ļĢńŌ…Ř—Ű»ň£¨ĹŐ ŕ£¨≤© Ņ…ķĶľ ¶£¨ī” ¬Ņů…ĹĶš–Õ‘÷ļ¶‘§∑ņ”ŽŅō÷∆ľľ ű—–ĺŅ£ĽĶÁĽį£ļ13808421339£ĽE-mail£ļk2001133@163.com

