一类严格反馈非线性切换系统的鲁棒自适应控制
朱柏城,张天平,高志远
(扬州大学 信息工程学院,江苏 扬州,225127)
摘要:针对一类严格反馈非线性切换系统,利用后推技术、积分型李雅普诺夫函数、神经网络的逼近能力以及驻留时间法,提出一种自适应神经网络控制方案,通过引入逼近误差补偿项,并利用Young’s不等式,改善控制系统的性能。与已有文献相比,该方案放宽对控制系统的要求,取消状态跳变量的幅值必须与跟踪误差有关的假设条件,理论分析证明非线性切换系统是半全局一致终结有界的,最后,仿真结果表明所提方案的有效性。
关键词:切换系统;后推;驻留时间;李雅普诺夫稳定性
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S1-0254-07
Robust adaptive control for class of
switched nonlinear systems in strict-feedback form
ZHU Bai-cheng, ZHANG Tian-ping, GAO Zhi-yuan
(College of Information Engineering, Yangzhou University, Yangzhou 225127, China)
Abstract: An adaptive neural network control scheme is proposed for a class of nonlinear switched systems in strict-feedback form. The design is based on the backstepping technique, the Lyapunov function of integral type, the approximation capability of neural networks, and the dwell-time approach. By introducing the adaptive compensation term of the approximation error, and utilizing Young’s inequality, the control performance of the closed-loop system is improved. Compared with the existing literature, the proposed approach relaxes the requirements of the system and eliminates the assumption that the amplitude of the state’s jump should be related to the tracking error. By theoretical analysis, the closed-loop control system is shown to be semi-globally uniformly ultimately bounded. Finally, simulation results are presented to illustrate the effectiveness of the proposed approach.
Key words: switched systems; backstepping; dwell-time; Lyapunov stability
近年来切换系统的稳定性研究已成为控制理论的热点之一,并取得了一些研究成果[1-3]。文献[4-8]研究线性切换系统的镇定控制问题,文献[9-12]主要讨论非线性切换系统的镇定控制问题。文献[9]研究一类虚拟控制增益为1的严格反馈非线性切换系统在任意切换信号下的镇定控制问题。目前所采用的方法主要有公共控制李雅普诺夫函数(CCLF)方法[1] 、多李雅普诺夫函数方法[2]、驻留时间法[3]等。
在现有的切换系统稳定性研究中,主要针对函数已知的切换系统研究,而针对函数未知的切换系统研究比较少。不确定性是实际系统的固有属性,不确定非线性系统的自适应控制一直受到国内外学者的广泛关注,并取得了一些研究成果。因此,利用神经网络或模糊系统研究不确定非线性切换系统的鲁棒自适应控制被提出来。文献[12]研究一类非线性切换系统的镇定控制问题,通过利用后推技术,二次型Lyapunov 函数,多层神经网络及驻留时间法,提出了一种自适应神经网络控制方案,但文献[12]存在一些不足之处,假设条件过于苛刻,处理逼近误差补偿项存在不足。本文作者在文献[12]的基础上,利用后推设计方法,积分型Lyapunov函数,神经网络的逼近能力,依次确定各虚拟控制,神经网络系统中的可调参数的自适应律和控制律,结合驻留时间法,提出一种自适应神经网络控制方案。通过引入逼近误差补偿项,并利用Young’s不等式,改善了控制系统的性能。与已有文献相比,该方案放宽了对控制系统的要求,取消了状态跳变量的幅值必须与跟踪误差有关的假设条件。
1 问题的描述
考虑如下切换非线性严格反馈系统:
其中:xi∈R(i=1, …, n)是系统的状态,并定义 ,
, 是控制输入,y是系统输出。σ
是控制输入,y是系统输出。σ 表示逐段常数的切换信号,而且
表示逐段常数的切换信号,而且 蕴含系统的第k个子系统在时刻t是激活的。
蕴含系统的第k个子系统在时刻t是激活的。 是未知的光滑函数。
是未知的光滑函数。
控制目标是基于后推方法设计控制输入 和切换规则,要求切换系统输出y尽可能的跟踪一个指定的期望轨迹yd,使得闭环切换系统是一致终结有界的。
和切换规则,要求切换系统输出y尽可能的跟踪一个指定的期望轨迹yd,使得闭环切换系统是一致终结有界的。
定义1 给定时间区域[t0, t],如果存在 和
和 使得
使得 成立,则
成立,则 称为平均驻留时间。其中
称为平均驻留时间。其中 为子系统运行的实行总次数,N0为初始值。
为子系统运行的实行总次数,N0为初始值。
假设1 存在正常数 和
和 ,使得
,使得
 ,
, ,
,
 ,且
,且 是可微的。定义
是可微的。定义 ,
, ,
, ,其中γ为已知常数。
,其中γ为已知常数。
假设2 期望的轨迹向量xid是连续的,且
 ,
, 。其中:
。其中:
 是已知的有界闭集。
是已知的有界闭集。
2 神经网络自适应控制器设计及稳定性分析
本文采用径向基函数神经网络对给定的未知光滑非线性函数 在紧集
在紧集 上进行逼近,即
上进行逼近,即

其中,逼近误差 ,
, ;
;

是已知光滑向量函数,神经网络节点数 ; 基函数
; 基函数 取高斯函数,即
取高斯函数,即
其中: 分别是高斯函数的中心和宽度,
分别是高斯函数的中心和宽度, 。理想权向量
。理想权向量 定义为:
定义为:
令 ,
,  为未知正常数,未知光滑非线性函数将在后文中给出。
为未知正常数,未知光滑非线性函数将在后文中给出。
对于切换非线性系统的第k个子系统

定义如下坐标变换
第1步(i=1) 针对方程 ,将x2看作虚拟控制输入,可设计α1去稳定子系统
,将x2看作虚拟控制输入,可设计α1去稳定子系统

定义积分型李亚普诺夫函数
由积分中值定理知, ,使得
,使得
 ,
,
因为 ,所以,
,所以,
 ,
,
故 是关于变量
是关于变量 的非负函数,将对时间t求导,得:
的非负函数,将对时间t求导,得:

其中:
 ,
,
 。
。
取 则有:
则有:

取虚拟控制律:
其中:k1>0是设计常数, 是径向基函数神经网络在有界闭集
是径向基函数神经网络在有界闭集 上对
上对 的逼近,
的逼近, 是理想权向量
是理想权向量 的估计,估计误差定义为
的估计,估计误差定义为 。
。 是
是 的估计,估计误差定义为
的估计,估计误差定义为 。
。
令 ,则
,则 ≤
≤
 。
。
将式代入式得:
令 。
。
考虑如下李亚普诺夫函数:
取自适应律

其中: 为正定常矩阵,
为正定常矩阵, 为设计正常数。
为设计正常数。
将 对时间t求导,得:
对时间t求导,得:


第i步 :
:  的导数
的导数 ,将
,将 作为虚拟控制输入,可设计
作为虚拟控制输入,可设计 去稳定
去稳定 子系统。
子系统。
类似于第1步定义积分型李亚普诺夫函数,可知 是关于变量
是关于变量 的非负函数,将对时间t求导,得
的非负函数,将对时间t求导,得

其中

 ,
,

取 ,则有
,则有

取虚拟控制律

其中,ki>0是设计常数, 是径向基函数神经网络在有界闭集
是径向基函数神经网络在有界闭集 上对的逼近,
上对的逼近,  是理想权向量
是理想权向量 的估计,估计误差定义为
的估计,估计误差定义为 。
。 是
是 的估计,估计误差定义为
的估计,估计误差定义为 。
。
令 ,则
,则
 。
。
将式代入式得:
令 。
。
考虑如下李亚普诺夫函数
取自适应律

其中, 为正定常矩阵,
为正定常矩阵, 为设计正常数。
为设计正常数。
将 对时间t求导,得:
对时间t求导,得:


第n步:
 的导数
的导数
 ,可设计u去稳定
,可设计u去稳定 子系统。
子系统。
类似于第1步定义积分型李亚普诺夫函数,可知 是关于变量
是关于变量 的非负函数,且
的非负函数,且
其中 由式确定。
由式确定。
采用如下控制律:

其中, 是设计常数,
是设计常数, 是径向基函数神经网络在有界闭集
是径向基函数神经网络在有界闭集 上对的逼近,
上对的逼近, 是理想权向量
是理想权向量 的估计,估计误差定义为
的估计,估计误差定义为 。
。 是
是 的估计,估计误差定义为
的估计,估计误差定义为 。
。
令 ,则
,则

令 。
。
考虑如下李亚普诺夫函数

取自适应律:

其中: 为正定常矩阵,
为正定常矩阵, 为设计正常数。
为设计正常数。
将 对时间t求导,得:
对时间t求导,得:


由于下列不等式成立:

将式代入式得:


令 为
为 的最大特征值,有:
的最大特征值,有:


 ,
,
其中: 。
。
当 时,
时,
即 。
。

令
 。
。

在任意切换时刻tk,系统从子系统i切换到子系统j,取参数 ,则
,则 。
。
定理1 考虑非线性切换系统,其控制律由式确定,自适应律由式,和确定,并满足假设1和假设2,在任意切换时刻tk,系统从子系统i切换到子系统j,如果存在正常数μ,使得
 ,且平均驻留时间满足
,且平均驻留时间满足 ,则非线性切换系统是一致终结有界的,其中
,则非线性切换系统是一致终结有界的,其中 由式确定,
由式确定, 。
。
证明 设满足非线性切换系统在运行时出现式的情况次数为m,即非线性切换系统运行时,子系统系统存在 的次数为m。
的次数为m。

情况1 若非线性切换系统运行时,不出现式的情况,即每一个子系统
 ,
,
此时,非线性切换系统有界。
情况2 若非线性切换系统运行时,出现式的情况,即存在子系统
不妨假设出现时间为 ,各时间段长度为
,各时间段长度为 。
。

由于 ,所以,
,所以,
由式得:

将式代入式,得:

由式可知:各子系统是有界的。所以,由式可知:情况2发生时非线性切换系统有界。
综合情况1和情况2可知,非线性切换系统是一致终结有界的。
3 仿真结果
考虑如下非线性切换系统:
其中: 为控制输入,切换信号
为控制输入,切换信号 ,光
,光
滑函数 ,
, ,
, ,
,
 ,
, ,
, 
 。控制目标
。控制目标
是使输出y跟踪指定信号 。
。
采用控制律 , 其中:
, 其中:




 ;
;
 的自适应律分别由式
的自适应律分别由式
和确定;

 =0,
=0,


 ;
; 在[-1, 1]内随机选取,
在[-1, 1]内随机选取,
 在[-2, 2]内随机选取。仿真结果表明非线性切换系统是一致终结有界的。
在[-2, 2]内随机选取。仿真结果表明非线性切换系统是一致终结有界的。
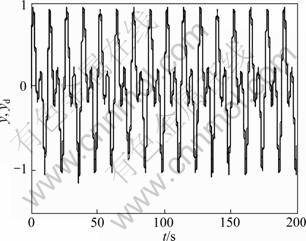
图1 输出y (实线)跟踪期望轨迹yd (虚线)
Fig.1 Output y (solid line)follows desired trajectory yd (dotted line)
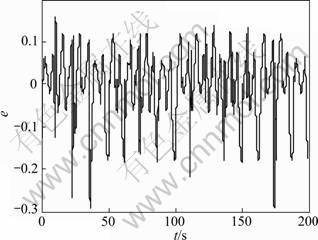
图2 跟踪误差e
Fig.2 Tracking error e
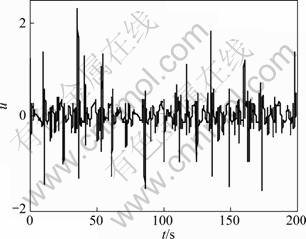
图3 控制信号 uσ(t)
Fig.3 Control signal uσ(t)
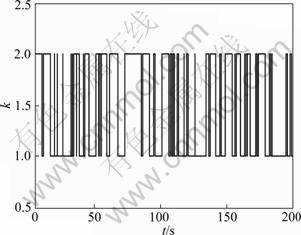
图4 切换信号 σ(t)=k
Fig.4 Switching signal σ(t)=k
4 结论
研究一类严格反馈非线性切换系统鲁棒自适应控制问题,利用后推技术,积分型Lyapunov函数,神经网络的逼近能力,以及驻留时间法, 提出一种自适应神经网络控制方案。通过引入逼近误差补偿项, 并利用Young’s不等式,改善了控制系统的性能。与已有文献相比,该方案放宽了对控制系统的要求,取消了状态跳变量的幅值必须与跟踪误差有关的假设条件。理论分析证明了非线性切换系统一致终结有界。 最后,仿真结果表明了所提方案的有效性。
参考文献:
[1] Wu J L. Feedback stabilization for multiinput switched nonlinear systems: Two subsystems case[J]. IEEE Transactions on Automatic Control, 2008, 53(4): 1037-1042.
[2] SUN Zhen-dong, GE Shu-zhi. Analysis and synthesis of switched linear control systems[J]. Automatica, 2005, 41(2): 181-195.
[3] Hespanha J P, Morse A S. Stability of switched systems with average dwell time[C]//Proceeding of 38th conf on decision and control. Phoenix, AZ, 1999: 2655-2660.
[4] CHEN Zheng, GAO Yan. The computation of a common quadratic Lyapunov function for a linear control system[J]. J of Information and Computing Science, 2007, 2(4): 299-304.
[5] Gurvits L, Shorten R, Mason O. On the stability of switched positive linear systems[J]. IEEE Trans on Automatic Control, 2007, 52(6): 1099-1103.
[6] SUN Zhen-dong. Stabilizing switching design for switched linear systems: A state-feedback path-wise switching approach[J]. Automatica, 2009, 45(7): 1708-1714.
[7] ZHANG Li-xian, GAO Hui-jun. Asynchronously switched control of switched linear systems with average dwell time[J]. Automatica, 2010, 46(5): 953-958.
[8] SUN Zhen-dong, GE Shu-zhi. Dynamic output feedback stabilization of a class of switched linear systems[J]. IEEE Transactions on Circuits and Systems Ⅰ: Fundamental theory and applications, 2003, 50(8): 1111-1115.
[9] WU J L. Stabilizing controllers design for switched nonlinear systems in strict-feedback form[J]. Automatica, 2009, 45 (4): 1092-1096.
[10] XIE Wen-xiang, WEN Chang-yun, LI Zheng-guo. Input-to-state stabilization of switched nonlinear systems[J]. IEEE Transactions on Automatic Control, 2001, 46(7): 1111-1116.
[11] Chesi G. On the minimum stable commutation time for switching nonlinear systems[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1284-1289.
[12] HAN T T, GE S Z, Lee T H. Adaptive neural control for a class of switched nonlinear systems[J]. Systems & Control Letters, 2009, 58(2): 109-118.
[13] 张天平, 张惠艳, 顾海军. 基于后推设计的直接自适应模糊控制[J]. 控制与决策, 2004, 19(1): 22-26.
ZHANG Tian-ping, ZHANG Hui-yan, GU Hai-jun. Direct adaptive fuzzy control based on backstepping technique[J]. Control and Decision, 2004, 19(1): 22-26.
(编辑 陈爱华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(60874045,60904030, 61174046)
通信作者:张天平(1964-),男,江苏泰兴人,博士,教授,博士生导师,从事自适应控制及非线性控制等研究;电话:0514-87978319;E-mail:tpzhang@yzu.edu.cn

