J. Cent. South Univ. Technol. (2009) 16: 0865-0870
DOI: 10.1007/s11771-009-0143-y

Microscopic simulation of multi-lane traffic under dynamic tolling and information feedback
LIU Tian-liang(刘天亮), HUANG Hai-jun(黄海军), TIAN Li-jun(田丽君)
(School of Economics and Management, Beijing University of Aeronautics and Astronautics, Beijing 100191, China)
Abstract: To investigate drivers’ lane-changing behavior under different information feedback strategies, a microscopic traffic simulation based on the cellular automaton model was made on the typical freeway with a regular lane and a high-occupancy one. A new dynamic tolling scheme in terms of the real-time traffic condition on the high-occupancy lane was further designed to enhance the whole freeway’s flow throughput. The results show that the mean velocity feedback strategy is generally more efficient than the travel time feedback strategy in correctly guiding drivers’ lane choice behavior. Specifically, the toll level, lane-changing rate and freeway’s throughput and congestion coefficient induced by the travel time feedback strategy oscillate with larger amplitude and longer period. In addition, the dynamic tolling scheme can make the high-occupancy lane less congested and maximize the freeway’s throughput when the regular-lane inflow rate is larger than 0.45.
Key words: information feedback strategy; dynamic tolling scheme; cellular automaton model; high-occupancy lane
1 Introduction
Road congestion pricing has been theoretically regarded as an effective means for alleviating traffic congestion [1-2]. Some cities such as Singapore and London have implemented the ring toll schemes to practise this theory, i.e., vehicles entering a pre-designed area will be charged. In United States, a more prevalent form of congestion pricing is to manage the use of various lanes with the aid of certain tolling schemes, which allow solo-drivers to run on the high-occupancy lane by paying tolls.
In a typical road setting, lanes on a given freeway are designated either as regular or high-occupancy lanes. A commonly used operation policy is to provide superior free-flow traffic service on the high-occupancy lane by tolls for maximizing the freeway’s flow throughput [3]. To achieve this objective efficiently, the toll paid by solo-drivers running on the high-occupancy lane should be adjusted in a real-time manner in response to the time-varying traffic condition. YIN and LOU [4] proposed a reactive self-learning approach to determine the time-varying tolls according to detected traffic arrivals. Obviously, whether the solo-drivers are willing to pay the tolls or not depends upon the real-time traffic conditions on regular and managed toll lanes. Therefore, the information feedback strategy adopted plays an important role in the travelers’ decision-making process. Previous studies about information feedback strategies mainly concern with the route choice behavior at the entrance [5-10], rather than the lane-changing behavior in a multi-lane freeway [11]. In this work, based on the cellular automaton (CA) model, two different information feedback strategies together with a new dynamic tolling scheme were simulated to investigate the lane-changing behavior of drivers in a road setting, which was similar to that used by YIN and LOU [4], where the point for entering the toll lane was located in the freeway.
2 Model and strategies
2.1 Model description
Fig.1 shows the discrete representation of a multi- lane freeway with the length of L cells, 7.5 m for each cell. Two lanes are considered and separated by a barrier: the lane above is for high-occupancy vehicles (HOV) and the vehicles that enter this lane after paying; and the lane below is a regular lane used by all vehicles. A transmission section is established to facilitate the lane-changing behavior of drivers. For simplicity, at the right end of the transmission section, the lane above is divided into two sections of HOV lane (left) and high-occupancy toll (HOT) lane (right), while the lane below is split into regular lane sections A (left) and B (right). Let the transmission section cover Lc cells, HOT section cover Lh cells and the regular lane section B Lh cells. Then, HOV section covers L-Lh cells. Let the on-ramp locates at xon on the regular lane.
Fig.2 shows the system configuration for studying
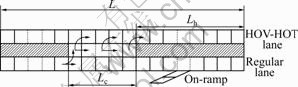
Fig.1 Discrete representation of freeway
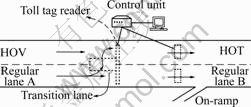
Fig.2 System configuration for studying information feedback strategies together with designed dynamic tolling scheme
information feedback strategies together with the designed dynamic tolling scheme. Drivers, before entering the transmission section for paying, make decisions about whether or not changing lane in a real-time manner by comparing the current toll with the travel time difference of HOT and B sections. It should be pointed out that the toll will be transformed into travel time based on a certain value of time to generate the uniform measure unit. For simplicity, homogeneous travelers are considered in this work. To reflect the dissimilar willingness to pay, a uniformly-distributed random number within [0, 1] is generated for doing this comparison with probability Pc. If the toll measured by time is smaller than the travel time difference and the random number is also smaller than Pc, the driver enters the transmission section and then moves ahead for finding the lane-changing opportunity. The detailed lane-changing process is described as follows: if the corresponding cell on adjacent HOT section is empty and there is no collision with preceding and back vehicles, this vehicle immediately gets into HOT section; otherwise it reaches at the right end of the transmission section and stops there till the lane-changing condition is fulfilled.
The NAGEL-SCHRECKENBERG (NS) model [12] is adopted here to implement the above details. The NS model has been validated to be effective in reflecting such realistic traffic phenomena as soliton wave, phantom jams, stop-and-go wave [13] and synchronized traffic flow. Let the state of vehicle n be determined by its speed vn and position xn. vn varies between 0 and the maximum speed vmax. The number of empty cells between vehicles n and n+1 is gn=xn+1-xn-1 (vehicle n+1 precedes vehicle n). The parallel update rules of the model are as follows.
(1) Acceleration: vn←min(vn+1, vmax);
(2) Deceleration:  ←min(vn, gn);
←min(vn, gn);
(3) Randomization and braking:  ←max(-1, 0) with a probability P;
←max(-1, 0) with a probability P;
(4) Movement: xn←xn+ .
.
where and represent the safe speed and the random brake speed of vehicle n, respectively. Without loss of generality, vmax=3 cell/s and P=0.25 were set in this study.
The simulation is carried out under the following boundary condition. In each time step, when the update process is finished, the positions of the last vehicles on
HOV lane and section A will be checked. If  >vmax or
>vmax or  >vmax, then a new vehicle with velocity vmax will be inserted at the entrance with inflow rate
>vmax, then a new vehicle with velocity vmax will be inserted at the entrance with inflow rate  or
or  . Here, and are the positions of the last
. Here, and are the positions of the last
vehicles on HOV lane and section A, respectively. At the exit of the freeway, when the first vehicle on HOT section or section B goes beyond L, it will be removed from the system and the second vehicle will become the new leading vehicle and move without hindrance.
A simple setup for inserting vehicles is used at the entrance of the on-ramp [14]. At each time step, section B’s region (xon-Lramp, xon) is scanned, here Lramp is the width of the on-ramp, and the longest gap between two adjacent vehicles in this region is found. If this gap is long enough for inserting a vehicle, then a new vehicle is inserted into the middle cell of the gap with probability Pon. The velocity of the newly inserted vehicle is set to equal that of its preceding one on regular lane B section.
2.2 Dynamic tolling scheme
The most direct and economically efficient way to alleviate road congestion is to impose a toll to the users on congested road section and thus transfer the traffic flow into a less congested state [15]. It is commonly accepted that a satisfying traffic condition for high-occupancy vehicles must be ensured though solo-drivers are allowed to run on the high-occupancy toll lane by paying. In this section, a new dynamic tolling scheme is designed for maximizing the freeway’s flow throughput according to the real-time congestion coefficient on HOT section. The congestion coefficient is given as follows [8]:
 (1)
(1)
where ni denotes the number of vehicles contained in the ith congestion cluster of the flow. In a traffic cluster, the gap between any two adjacent vehicles is very small and the speeds of all vehicles are almost identical. Obviously, the travel time of the last vehicle in a cluster is dramatically influenced by the cluster size. Here, exponent w is used for each cluster size for representing the nonlinear relationship between cluster size and congestion coefficient. For simplicity, w=2 is adopted in this work, as done in Ref.[8].
When C2 is large, the toll should be set high for restraining vehicles from using HOT section; otherwise, the toll should be adjusted down for enhancing the freeway’s throughput. With this consideration, the dynamic tolling scheme is designed as follows:
 (2)
(2)
where Stoll is the dynamic toll; K is a positive parameter and C3 is the critical congestion coefficient. When C2>C3, the transition from free flow phase to jam phase will occur. In this freeway setting, the critical congestion coefficient C3=402.18 vehicle2 is adopted when the average density and throughout reach 0.2 vehicle/cell and 0.43 vehicle/s, respectively, which can be found from the fundamental diagram obtained on HOT section (see Fig.3).
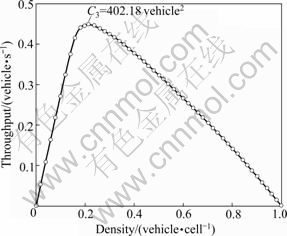
Fig.3 Fundamental diagram on HOT section
2.3 Information feedback strategies
Two different real-time information feedback strategies, namely the travel time feedback strategy (TTFS) and the mean velocity feedback strategy (MVFS), are investigated in this study.
2.3.1 Travel time feedback strategy (TTFS)
At the beginning of simulation, no vehicles leave the system, there is no any message reported on the information board installed at position L-Lh and the vehicles on regular lane continue to move forward till leaving the system. For each vehicle moving on section HOT or regular lane section B, the times for entering and leaving are recorded by the system center and the difference between them is regarded as the real travel time experienced by this vehicle. The travel times for traveling on HOT section and regular lane section B are immediately displayed on the information board. The toll is also displayed on it. Drivers approaching to the transmission section compare the toll with the time saving for choosing HOT section and decide whether to make lane-changing.
2.3.2 Mean velocity feedback strategy (MVFS)
This strategy publishes the instantaneous information about the traffic conditions on HOT and B sections. At every time, the speeds of all vehicles moving on the two sections are provided to the system center. For each section, the center calculates the mean value of these speeds and the instantaneous travel time based on the section length. The instantaneous travel times of the two sections are shown on the information board for guiding the lane-changing decisions of vehicles approaching to the transmission section.
3 Simulation results
The simulation results were presented in this section. Each simulation lasted for 30 000 time steps and the last 10 000 ones are used for statistic analysis. In the simulations, all the input parameters are as follows: L= 2 000 cell, Lc=10 cell, Lh=1 500 cell, K=6 RMB?, Pc= 0.6, =0.4, =0.6, Pon=0.2, xon=1 500 cell, Lramp= 30 cell and the value of time=0.06 RMB?/s. Fig.4 displays the tolls, the lane-changing, the freeway’s throughput and the congestion coefficient induced by the two information feedback strategies. Here the lane-changing behavior of vehicles is denoted by 0 or 1 (1 represents the actual lane-changing occurring at the corresponding step time and 0 represents no lane-changing occurring), and the freeway’s throughput is the sum of the throughputs on HOT section and regular lane section B. For example, the HOT section’s flow throughput can be computed by
 (3)
(3)
where  and Nh are the mean velocity and the number of vehicles moving at current time step, respectively.
and Nh are the mean velocity and the number of vehicles moving at current time step, respectively.
Comparing Fig.4(a) with Fig.4(b), it can be found that the tolls under TTFS oscillate with larger amplitude and longer period than those under MVFS. In addition, the lane-changing actions under TTFS congregate much more greatly than those under MVFS. This is caused by the information lag effect caused by TTFS. The TTFS publishes a vehicle’s real travel time only when it leaves the system. On the contrary, the travel times published
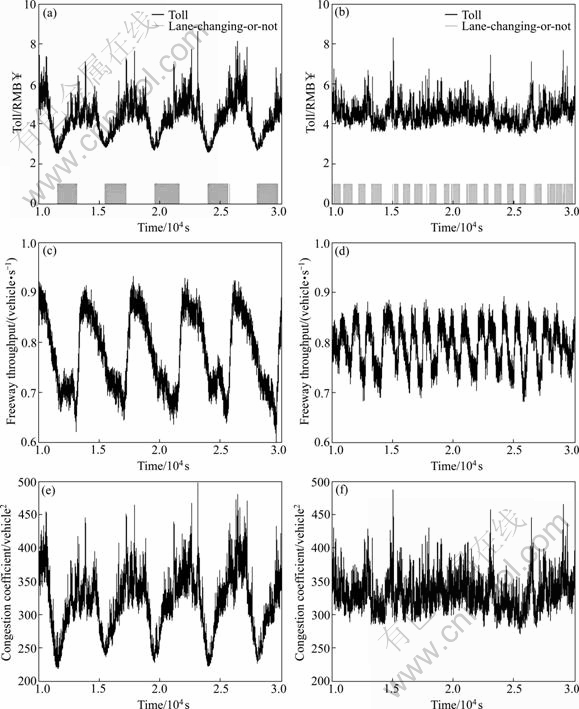
Fig.4 Toll, lane-changing, freeway’s throughput and congestion coefficient induced by TTFS (a), (c), (e) and by MVFS (b), (d), (f)
by MVFS are computed from the current speeds of all vehicles still moving on road. Thus, under MVFS drivers can receive more fresh information and make more timely decisions in lane-changing process.
Fig.4(c) shows that the lag effect caused by TTFS makes the freeway’s throughput fluctuate with larger amplitude and longer period. The freeway’s throughput under MVFS also oscillates, but in a way of shorter period and smaller amplitude, as shown in Fig.4(d). The congestion coefficients plotted in Fig.4(e) and Fig.4(f) exhibit similar characteristics with the freeway’s throughput. It should be noted that under TTFS, the congestion coefficient frequently exceeds C3, while the state of affairs under MVFS is better and the congestion coefficients are basically less than C3. The reason for this is that the concentrative lane-changing action under TTFS worsens the traffic condition on HOT lane. Therefore, MVFS is generally more efficient than TTFS in guiding drivers to make reasonable decisions. The information supplied by TTFS is demoded, which makes all statistic data oscillate with larger amplitude and longer period.
Furthermore, the freeway’s throughputs are investigated in the following three scenarios: the lane above is a HOV lane only; the lane above is divided into HOV and HOT sections but operated under TTFS and MVFS, respectively. Fig.5 shows the results, where all parameters, except the regular-lane inflow rate , are the same as before. When is less than 0.35, the throughputs in three scenarios are almost identical and increase with the increase of since the traffic on both HOT lane and regular lane are at the free-flow state, allowing that the shifts of vehicles from the regular lane to HOT section do not produce any effect. When is larger than 0.35, the regular lane becomes congested. Obviously, the throughput in the first scenario cannot be increased anymore. In the other two scenarios, a new opportunity is provided for drivers to change lane although paying toll is required. Fig.5 shows that the throughput is increased due to the existence of HOT section. When is larger than 0.45, a relatively high throughput is achieved by MVFS because of its advantage in supplying more correct information. Fig.5 also shows that the freeway’s throughput will not be further enhanced when is larger than the critical value, i.e., 0.50, in the studied road setting.
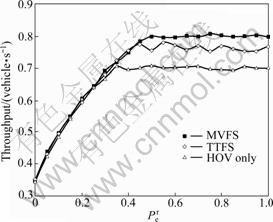
Fig.5 Freeway’s throughput with inflow rate
Finally, the evolutions of the tolls and the driver’ lane-changing rates are presented to find more insights on the combination of information strategy and dynamic tolling scheme. Here the lane-changing rate is the mean value of real lane-changing times. For simplicity, only the information strategy MVFS is used for demonstration. Numerical results are depicted in Fig.6.
Fig.6(a) indicates that, when the HOV-section inflow rate is smaller, tolls should be generally lower to encourage the use of HOT section and then enhance the freeway’s throughput. At this time, compared with the case of smaller than 0.5, is larger, tolls should be adjusted up a bit to restrict the excessive lane-changing actions. When is larger than some critical values, the traffic condition on HOV section is close to be saturated, and higher tolls should be set to stop the shifts of vehicles from regular lane. Fig.6(a) also shows that the critical value goes down with the increase of . Furthermore, it can be seen from Fig.6(b) that for each , with the increase of , the lane-changing rate firstly equals 0, and then goes up and finally keeps at a relatively steady value. These are consistent with the results in Fig.4.

Fig.6 Joint effect of parameters  and on tolls (a) and lane-changing rate (b)
and on tolls (a) and lane-changing rate (b)
4 Conclusions
(1) In virtue of the cellular automaton model, the lane-changing behavior of drivers in a multi-lane freeway traffic system with information feedback and dynamic tolling is simulated, in which drivers can adjust their lane choices in a real-time manner by comparing the toll with the travel time saving.
(2) Two different information feedback strategies, namely the travel time feedback strategy (TTFS) and the mean velocity feedback strategy (MVFS), are numerically compared on the basis of simulation results. MVFS is verified to be generally more efficient than TTFS in guiding drivers to make reasonable decisions.
(3) A new dynamic tolling scheme is designed under the real-time traffic condition on the high- occupancy lane. The results show that the existence of HOT section (for the use of solo-drivers after paying) can improve the whole freeway’s throughput, and the designed tolling scheme can make the high-occupancy lane less congested.
References
[1] LINDSEY R, VERHOEF E. Handbook of Transport Systems and Traffic Control [M]. Oxford: Pergamon, 2001: 77-105.
[2] LINDSEY R. Do economists reach a conclusion on road pricing? The intellectual history of an idea [J]. Economic Journal Watch, 2006, 3(2): 292-379.
[3] Federal Highway Administration. A guide for HOT lane development [R]. Washington D C: Department of Transportation, 2003.
[4] YIN Y F, LOU Y. Dynamic tolling strategies for managed lanes [C]// Proceedings of the 86th Annual Meeting of the Transportation Research Board. Washington D C: Transportation Research Board of the National Academies, 2007: 07-1806.
[5] WAHLE J, BAZZAN A L C, KL?GL F, SCHRECKENBERG M. Decision dynamics in a traffic scenario [J]. Physica A, 2000, 287(3/4): 669-681.
[6] LEE K, HUI P M, WANG B H, JOHNSON N F. Effects of announcing global information in a two-route traffic flow model [J]. Journal of the Physical Society of Japan, 2001, 70 (12): 3507-3510.
[7] WAHLE J, BAZZAN A L C, KL?GL F, SCHRECKENBERG M. The impact of real-time information in a two-route scenario using agent-based simulation [J]. Transportation Research: Part C, 2002, 10(5/6): 399-417.
[8] WANG Wen-xu, WANG Bing-hong, ZHENG Wen-chen, YIN Chuan-yang, ZHOU Tao. Advanced information feedback in intelligent traffic systems [J]. Physical Review E, 2005, 72(6): 066702.
[9] TIAN Li-jun, LIU Tian-liang, HUANG Hai-jun. Comparative studies on information feedback strategies in traffic networks with overlapping routes [J]. Acta Physica Sinica, 2008, 57(4): 2122-2129. (in Chinese)
[10] TIAN Li-jun, HUANG Hai-jun, LIU Tian-liang. Information feedback strategies in a signal controlled network with overlapped routes [J]. Chinese Physics Letters, 2009, 26(7): 078903.
[11] LAVAL J A, DAGANZO C F. Lane-changing in traffic streams [J]. Transportation Research: Part B, 2006, 40(3): 251-264.
[12] NAGEL K, SCHRECKENBERG M. A cellular automaton model for freeway traffic [J]. Journal of Physique I (France), 1992, 2: 2221-2229.
[13] YANG Meng-long, LIU Yi-guang, YOU Zhi-sheng. A new cellular automata model considering finite deceleration and braking distance [J]. Chinese Physics Letters, 2007, 24(10): 2910-2913.
[14] GAO Kun, JIANG Rui, HU Shou-xin, WANG Bing-hong, WU Qing-song. Cellular-automaton model with velocity adaptation in the framework of Kerner’s three-phase traffic theory [J]. Physical Review E, 2007, 76(2): 026105.
[15] YANG Hai, HUANG Hai-jun. Mathematical and economic theory of road pricing [M]. London: Elsevier, 2005.
(Edited by CHEN Wei-ping)
Foundation item: Project(70521001) supported by the National Natural Science Foundation of China; Project(2006CB705503) supported by the National Basic Research Program of China; Project supported by the Innovation Foundation of BUAA for PhD Graduates
Received date: 2008-12-26; Accepted date: 2009-04-08
Corresponding author: HUANG Hai-jun, Professor, PhD; Tel: +86-10-82316608; E-mail: haijunhuang@buaa.edu.cn

