J. Cent. South Univ. (2012) 19: 144-149
DOI: 10.1007/s11771-012-0983-8
Influence of wave and current on deep-sea mining transporting system
XU Hai-liang(徐海良), ZHOU Gang(周刚), WU Bo(吴波), WU Wan-rong(吴万荣)
State Key Laboratory of High-performance Complex Manufacturing,
School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China
? Central South University Press and Springer-Verlag Berlin Heidelberg 2012
Abstract: As a solution to the breaking of pipeline under high axial force, carbon fiber composite pipe with low density and high intensity is applied to deep-sea mining transporting system. Based on the fact that the transporting pipe is under the forces of gravity, inner liquid, buoyancy as well as hydrodynamic force, geometric nonlinear finite element theory has been applied to analyzing the transporting system. Conclusions can be drawn as follows. Under the interaction of waves and currents, node forces FX and FZ acted by the transporting pipe on the mining vehicle are less than 2 kN, which indicates that waves and currents have little influence on the spatial shape of the transporting pipe and the mining vehicle movement. On the other hand, the horizontal force acting on the mining ship could be as large as 106 830 N, which has great influence on the mining system.
Key words: carbon fiber composite pipe; waves and ocean currents; finite element; mineral transporting system; mechanical analysis
1 Introduction
Because of resource scarcity on land, human beings start to focus on sea resources. There are rich mineral resources at the bottom of the ocean, among which the manganese nodules lie widely on the seabed 4 000- 5 500 m deep, and the cobalt crust on the seamount 1 000-3 000 m deep. Both of them have great values for exploitation [1]. Developed countries around the world have been making great progress on 5 000 m deep-sea mining technology since the beginning of the 20th century. After theoretical and experimental research, it is widely recognized that a mining system which consists of a mining vehicle, a mining ship and a hydraulic lifting system has the greatest potential for industrial appliance. The system can be divided into rigid pipe mining system and flexible pipe mining system [2-3].
SHAW [4] concluded from his research that because of the great load of axial force, the transporting pipe was sure to break when it was more than 3 000 m long, no matter which cross section of the N80 pipe was applied [4]. In order to solve this problem, the application of low density and high intensity carbon fiber composite pipe for deep-sea mining system was suggested.
To ensure smooth operation of the system, the ore transporting pipe must be in perfect spatial shape so that it will not hang down to the seabed or get rolled by the mining vehicle. On the other hand, the pipe-acted force has great influence on both the mining vehicle and the mining scope [5-7]. Considering these factors and the mechanical characteristics of the transporting pipe, geometrical non-linear mechanical analysis is made on the carbon fiber composite pipe so as to discuss its spatial shape and the pipe-acted force on the mining vehicle.
2 Carbon fiber composite pipe
Carbon fiber is high in intensity and low in density, while rubber is perfect in elasticity, abrasion endurance and anti-corrosion. Compositing these two materials, a kind of new material from which the transporting pipe is made can be applied to deep-sea mining system since it bears the above advantages. The structure of the carbon fiber composite pipe is shown in Fig. 1.
The density of carbon fiber is 1.5-2.0 g/cm3, less than one quarter that of steel, while its tensile strength is twice that of steel and its modulus is as large as seven times that of steel. The density of rubber is 900 kg/cm3, thus, the density of the composite material can be expressed as
 (1)
(1)
where ρf is the density of carbon fiber; ρm is the density of substrate; φf is the volume fraction of carbon fiber, and generally it takes the value of 60%-70%; φm is the volume fraction of substrate.
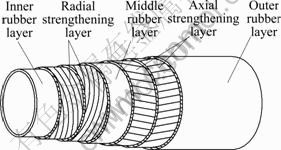
Fig. 1 Structure of carbon fibre composite pipe
Compounding carbon fiber (whose density is 1 800 kg/m3) with rubber, a kind of new pipe with high intensity and perfect abrasion endurance can be obtained, and its density ranges from 1 440 to 1 530 kg/m3.
The material of carbon fiber composite pipe can be regarded as orthotropic material, and presently its properties are mainly expressed by equivalent elastic modulus [8], among which the equivalent elastic modulus Eg ranges from 1010 to 1011 N/m2, and the equivalent bending resistance modulus Ew ranges from 108 to 109 N/m2.
3 Load analysis on transporting pipe
When moving in the sea, the transporting pipe is under the influence of buoyancy, gravity of itself and inner liquid.
The gravity Wm of pipe element m can be defined as
 (2)
(2)
where ρg is the density of pipe, Do is the outer diameter of the transporting pipe, Di is the inner diameter of the transporting pipe, and Lm is the length of pipe element m.
The gravity GF of the inner fluid can be defined as
GF=ρgVmg (3)
where Vm is the fluid volume in pipe element m.
The buoyancy FB of pipe element m in the sea can be defined as
 (4)
(4)
where ρl is the density of the inner liquid.
For small diameter component, if the ratio of the diameter of mast D to the wave-length λw satisfies the expression of D/λw≤0.2, Morison equation is applied to calculating the hydrodynamic force of the transporting system [9-11]. Hydrodynamic force is generated due to the relative velocity and relative acceleration between water particles and transporting system. The calculations in this work cover the following two parts: 1) hydrodynamic force generated by currents, and 2) hydrodynamic force generated by waves.
Based on Morison equation, taking an infinitesimal length cylinder dz in any depth z, the horizontal component of hydrodynamic force can be expressed as
 (5)
(5)
where dFx is the horizontal hydrodynamic force of infinitesimal cylinder; CD is the normal drag coefficient; CM is the inertial drag coefficient; Do is the diameter of cylinder, m; ρl is the density of water, kg/m3; vx is the horizontal speed component of water particle, m/s; v′x is the horizontal acceleration component of water particle, m/s2; dz is the infinitesimal cylinder, m.
According to the data of sailing surveys, the velocity on sea surface is 1.7 m/s and that of seabed is 0.1 m/s [12]. Supposing that the current is steady and its velocity varies with depth, it can be expressed as [13-14]
 (6)
(6)
where vc is the current velocity at different depth, m/s; vf is the current velocity at given surface, m/s, and it takes value of 1.7 m/s; z is the coordinate of depth with the upward direction positive.
Suppose the wave is cosine, the wind scale is six, and the highest wave is 4 m, thus the wave shape function can be expressed as [15]
 (7)
(7)
where hW is the wave height, m, and it takes value of 4 m; kW is the wave number; ω is the wave frequency, rad/s.
The speed of water particle and its acceleration vary with the periodic motion of the wave. According to the wave theory and ocean hydrodynamics, formulas can be obtained as follows.
The horizontal speed component of water particle and its vertical speed can be expressed as
 (8)
(8)
 (9)
(9)
where VWV is the horizontal speed component of water particle, m/s; VWW is the vertical speed component of water particle, m/s.
The horizontal acceleration component of water particle and its vertical acceleration component can be expressed as
 (10)
(10)
 (11)
(11)
where  is the horizontal acceleration component of water particle, m/s2;
is the horizontal acceleration component of water particle, m/s2;  is the vertical acceleration component of water particle, m/s2.
is the vertical acceleration component of water particle, m/s2.
The speed and the acceleration of hydrodynamic force generated by current and wave can be obtained from Eqs. (6), (8) and (10). By substituting Eq. (5), the horizontal component of hydrodynamic force generated by the joint effect of the currents and waves can be obtained.
Similarly, the vertical component of hydrodynamic force can be expressed as
 (12)
(12)
where dFx is the vertical hydrodynamic force of infinitesimal cylinder, N; CT is the tangential drag coefficient; vz is the vertical speed component of water particle, m/s; v′z is the vertical acceleration component of water particle, m/s2.
The horizontal and vertical components of hydrodynamic force exerting on the transporting system in depth of Z2-Z1 can be calculated by integrating Eqs. (5) and (12).
4 Mechanical model of mineral transporting system
Coordinate space of the ore transporting system is defined as follows: the positive of X axial is the direction of current, X-Y plane is the horizontal plane, the joint of mining ship and transporting pipe is defined as coordinate origin, and Z axial is perpendicular to X-Y plane, with the upward direction positive.
Suppose that the buffer is simplified as mass unit P of 50 t, and the transporting pipe and flexible pipe are simplified as tube beams. The mechanical model of the ore transporting system can be obtained as Fig. 2.
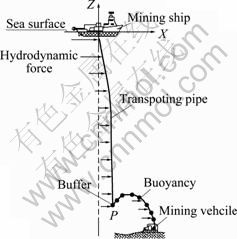
Fig. 2 Mechanical model of mineral transportation system
5 Wave and current influence on carbon fiber composite pipe transporting system
To ensure smooth operation of the system, the finite element analysis method has been applied to analyzing the transporting system according to the loads and the moving situation. Element pipe59 in software ANASYS is a single-axis element which can withstand the effect of tension, compression and bending; furthermore, it can simulate ocean waves and currents. Element stress of pipe59 includes hydrodynamic force and buoyancy, and its unit mass includes the mass of attach water and internal water. In addition, the element also fits for analyzing non-linear large strain and hard stiffness issue, so it is applied to carry out the transporting pipe analysis.
The 5 000 m-long constant diameter carbon fiber composite pipe was divided into 500 elements with each one 10 m long. Nodes and elements were numbered from top to bottom and there were 501 nodes in all. The buffer was seen as mass element numbered 501 coupled with node 501. The 400 m long flexible pipe was divided into 80 elements with each one 5 m long. Nodes and elements were numbered from the endpoint of the buffer to that of the mining vehicle, which was from 502 to 582.
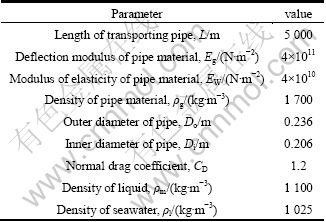
On the assumption that the mining ship was in static state, the influence of the mining vehicle on the transporting system was analyzed. The parameters of the carbon fiber composite pipe are listed in Table 1.
Table 1 Parameters of carbon fiber composite pipe
When the mining system was working, the mining ship stayed on the sea surface and the mining vehicle collected ores along the set route. When the workplace needed to be changed, the mining ship dragged the transporting system to the planned workplace. Water resistance was generated because of the viscosity of seawater and the relative motion between seawater and the transporting system. In addition, relative velocity and relative acceleration between seawater and transporting system would be produced under the interaction of waves and currents. According to Morison theory, hydrodynamic force was generated, too. Supposing that water particle moved at maximum speed with no consideration of relative acceleration, static analysis could be applied to the transporting system.
5.1 Current influence on mineral transporting system
Based on the parameters of the transporting system, together with the consideration of gravity, the inner liquid and buoyancy, the following results are obtained from mechanical analysis if the current velocity on sea surface takes the value of 1.7 m/s and that at seabed is 0.1 m/s.
The spatial shape of the transporting system is shown in Fig. 3 as the mining vehicle moves along X axial. It can be known from Fig. 3 that the bottom of the mining pipe offsets great distance along X direction, which means the mining pipe offsets greatly along current direction.
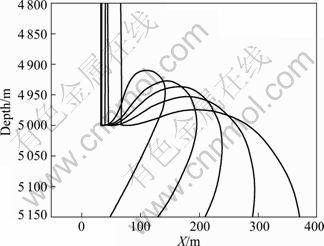
Fig. 3 Shape of transporting system (currents)
Because of proportional installation of buoyancy, the flexible pipe bends upward as a single arch, so it will not hang down to the seabed or get rolled by the mining vehicle. Meanwhile, the mining scope is expanded.
Figure 4 shows the node force of the transporting system, in which the horizontal force FX502 and vertical force FZ502 act on the buffer, and the horizontal force FX582 and vertical force FZ582 on the mining vehicle. For Node 582, the horizontal force FX582 increases firstly, and then decreases when the mining vehicle sheers off the mining ship along horizontal direction. The maximum absolute value of FX582 is about 2 kN, while the horizontal force FX582 is much smaller, thus, the influence acting on the mining vehicle is small.
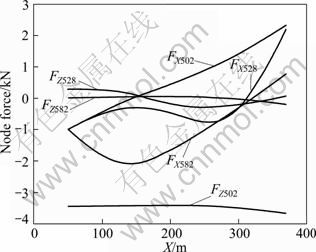
Fig. 4 Node force of transporting system (currents)
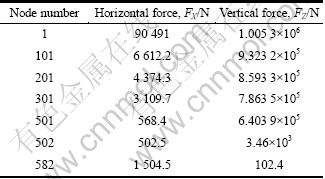
The calculating results show that the value of node force of the transporting pipe decreases from top to bottom and the maximum force appears at Node 1. The value of node force increases when the mining vehicle sheers off the mining ship along horizontal direction, but the increment is small. Table 2 gives the absolute values of seven key nodes of the transporting system when X coordinate of the mining vehicle is 210 m, in which, Node 501 is on the articulated point between the buffer and the transporting pipe, Node 502 is on the articulated point between the buffer and the flexible pipe, and Node 582 is on the articulated point between the mining vehicle and the flexible pipe.
Table 2 Absolute value of node force of transporting system under action of currents
5.2 Wave and current influence on mineral transporting system
Compared with water depth, wave height is much smaller for 5 000 m-deep sea mining, so it can be considered as a kind of micro-wave whose velocity varies with cosine law and attenuates quickly with the increase of water depth. On the assumption that the direction of wave velocity is the same as that of current and it moves at the maximum velocity, the velocity of water particle is 2.956 m/s on the sea surface which decreases quickly with the increase of water depth, and its velocity ranges from 0.01 to 0.1m/s at the seabed.
Suppose that the current velocity on sea surface is 1.7 m/s, at seabed it is 0.1 m/s, the wind scale is six level, and the highest wave is 4 m. Then, following results can be obtained from mechanical analysis.
Figure 5 shows the spatial shape of the transporting pipe under the interaction of waves and currents when the mining vehicle moves along X direction. By comparing Fig. 5 with Fig. 3, it is clear that the spatial shape of the transporting system stays almost unchanged while the mining vehicle is moving. Hence, current influence over the spatial shape of the transporting system is small.
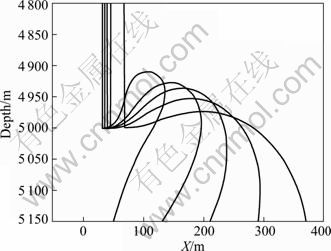
Fig. 5 Shape of transporting system (waves and currents)
Figure 6 shows the node force of the flexible pipe under the interaction of waves and currents, compared with the condition where there is only current acting on the pipe. The node forces FX582 and FZ582 that act on the mining vehicle are no more than 2 kN, so it is favorable for the mining vehicle movement.
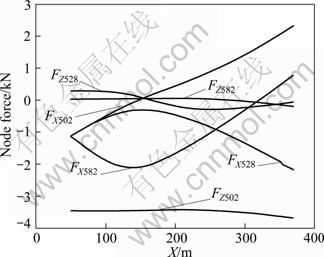
Fig. 6 Node force of transporting system (waves and currents)
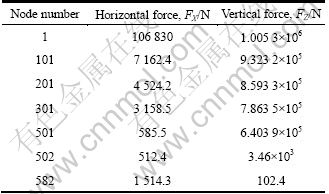
Table 3 gives the absolute values of seven key nodes of the transporting system under the interaction of waves and currents when the X coordinate of the mining vehicle is 210 m. Compared with the node force when only current is considered, horizontal node forces FX on the upper part of the pipe change notably, while the change of the horizontal node forces on the bottom part is small. Among them, horizontal force FX1 of Node 1 is 106 830 N, which is increased by 16 339 N compared with the only current-acted condition. There is only small change of horizontal forces of Node 502 and Node 582, which indicates that they have almost no influence on the system. For the vertical force FZ, it has no change because wave only acts on those parts of the transporting pipe near the sea surface.
Table 3 Absolute value of node force of transporting system under interaction of waves and currents
6 Conclusions
1) Under the interaction of waves and currents, FX582 and FZ582 of Node 582 on the articulated point between the flexible pipe and the mining vehicle are less than 2 kN, which indicates that the flexible pipe only has little influence on the mining vehicle movement.
2) Under the interaction of waves and currents, horizontal force FX1 of Node 1 on the articulated point between the transporting pipe and the mining ship could be as large as 106 830 N, while FZ2 has almost no change, so the transporting pipe has great influence on the mining ship.
3) Waves and currents have certain influence on the geometry of the upper part of the transporting pipe, but it has no influence on that of the bottom part and the spatial shape of the flexible pipe.
References
[1] JIAN Qu, HE Yong-sen, WANG Ming-he, LI Bao-yuan, JI Zheng. Numerical study of dynamic behavior of flexible pipes in deep sea mining [J]. Ocean Engineering, 2001, 19(1): 59-64. (in Chinese)
[2] ZOU Wei-sheng. China’s study on the lift system in deep ocean mining [C]// Hydrotransport 17-The 17th International Conference on the Hydraulic Transport of Solids. Cape Town, South Africa, 2007: 413-421.
[3] CHENG B R, CHUNG JIN S. Effects of axial damper and elastic joints on the 3-D dynamic responses of a deep-ocean pipe with torsional coupling [J]. International Journal of Offshore and Polar Engineering, 1997, 7(1): 36-43.
[4] SHAW J L. Nodule mining-three miles deep [J]. Marine Georesources and Geotechnology, 1993, 11(2): 181-197.
[5] CHUNG JIN S, CHENG B R. 3-D responses of vertical pipe bottom pin-joined to a horizontal pipe to ship motion and thrust on pipe-part I: MSE and FEM modeling [C]// Proceeding of the Ninth International Offshore and Polar Engineering Conference. Brest, France, 1999: 265-271.
[6] CHUNG JIN S, CHENG B R. MSE and FEM modeling of thrusts to elastic joints of long vertical pipe in 3-D nonlinear motions [J]. International Journal of Offshore and Polar Engineering, 1999, 9(2): 117-125.
[7] CHUNG JIN S, CHENG B R. Effects of multiple flexible joints along a long pipe on the 3-D nonlinear coupled pipe responses [J]. International Journal of Offshore and Polar Engineering, 1996, 6(3): 203-211.
[8] XU Hai-liang. Research on combined single pump and ore tank deep-sea mining flexible pipe transporting system [D]. Changsha: Central South University, 2004: 78. (in Chinese)
[9] XU Yan, ZHANG Wen-ming, FENG Ya-li. Modeling and dynamics analysis of multiple articulated lifting system [J]. Journal of Central South University: Science and Technology, 2008, 39(3): 560-565. (in Chinese)
[10] TUNG C C, HUANG N E. Combined effects of current and waves on fluid force [J]. Ocean Engineering, 1973, 2(4): 183-193.
[11] WANG Zhi, RAO Qiu-hua, LIU Shao-jun, FANG Min. Mechanical analysis of fluid-solid interaction of flexible hose in deep-ocean mining [J]. Journal of Central South University: Science and Technology, 2009, 40(4): 1106-1113. (in Chinese)
[12] YU Hong-yun, LIU Shao-jun. Dynamics of vertical pipe in deep-ocean mining system [J]. Journal of Central South University of Technology, 2007, 14(4): 552-556.
[13] FELIPPA C A. CHUNG JIN S. Nonlinear static analysis ocean mining pipe-part I: Modeling and formulation [J]. J Energy Resour Technol Trans ASME, 1981, 103(1): 11-15.
[14] CHUNG JIN S, FELIPPA C A. Nonlinear static analysis of deep ocean mining pipe-part II: Numerical studies [J]. J Energy Resour Technol Trans ASME, 1981, 103(1): 16-25.
[15] FENG Fu-zhang, FENG Ya-li, ZHANG Wen-ming. Analysis and calculation of the hydrodynamic force of lifting pipes in a 1km pilot-scale mining system of polymetallic nodules [J]. Journal of University of Science and Technology Beijing, 2006, 28(11): 1042-1046. (in Chinese)
(Edited by YANG Bing)
Foundation item: Project(50975290) supported by the National Natural Science Foundation of China; Project(2011QNZT057) supported by the Basic Operational Cost of Special Research Funding of Central Universities in China; Project(11JJ5028) supported by Hunan Provincial Natural Science Foundation, China
Received date: 2010-09-15; Accepted date: 2011-03-22
Corresponding author: XU Hai-liang, Professor, PhD; Tel: +86-15116281589; E-mail: hailiang_xu@yahoo.com.cn

