DOI: 10.11817/j.issn.1672-7207.2016.12.013
����ʽͬ��������ཻ������������������
��������������ë˧�����Ͳ��������
(������ҵ��ѧ �Զ���ѧԺ������ ������710072)
ժҪ������һ������������������ϵķ�����ͨ��ʵʱ��ϵ�������ֵ���ڵ���������������ǰ�ĵ�������ֵ���Ի�ȡ���ŵ����ļ��ԣ�ʵ������������ͬʱ�������ƶ���������������������������ϵļ�����̽����Ż����о��������������ƶ�������������������������Ϸ��ܹ��Ϻõ�ʵ���ڵ�����������µĵ��������жϣ��������ʽͬ������ڵ��ཻ������ʱ�������������⡣
�ؼ��ʣ�����ʽͬ����������ཻ�����ţ�������ϣ��ƶ�����������������
��ͼ����ţ�TM315 ���ױ�־�룺A ���±�ţ�1672-7207(2016)12-4048-08
Dead-time compensation method of single-phase AC excitation for three-stage brushless synchronous machines
MA Peng, LIU Weiguo, MAO Shuai, PENG Jichang, LUO Guangzhao
(School of Automation, Northwestern Polytechnical University, Xi��an 710072, China)
Abstract: A method was proposed to acquire the distorted one-phase excitation alternating current directions of the exciter in the starting mode of three-stage brushless synchronous starter/generator system for the dead-time compensation of the single-phase H bridge inverter. A three-parameter sine wave curve-fit algorithm which can fit sin waves in real time using the present sample current was adopted. Thus, the present sample current could be modified and current directions could be determined. Meanwhile, the sliding-window iterative algorithm was used to reduce the calculation amount of three-parameter sine wave curve-fit method. The results show that the three-parameter sine wave curve-fit algorithm optimized by sliding-window iterative method can estimate current directions well when the excitation current of the exciter is distorted seriously. Thus, the dead-time compensation of the single-phase H bridge inverter can be realized in the starting mode of three-stage brushless synchronous starter/generator system with the exciter excited by one-phase AC.
Key words: three-stage brushless synchronous machine; single-phase AC excitation; curve-fit; sliding-window iterative algorithm; dead-time compensation
δ�����յ�Դϵͳ��һ����Ҫ��չ���������/����˫����һ�廯[1-2]��Ŀǰ���ڴ��ʺ��ս�����Դϵͳ�����ձ��������ʽͬ�������Ϊ����������ڸõ��Ϊ��ˢ����ƣ������øõ����Ϊ���շ����������ʱ��������Ҫ����������������ת���������⡣�ڲ��ı����Ż��ṹ�Ļ����ϣ��±��ֵ�[3-7]�����һ�������Ż��Ķ�������ͨ�뵥�ཻ����ʵ���ھ�ֹ/����״̬ʱ�������ת�����ŵķ�������ͨ�������ʵ��ȶ��ַ�ʽ�õ��˳����֤����������[6]�ķ�����������״̬���������ת�����ŵ��������Ż������ŵ�ѹ�����ȡ�����[7]�ķ�����ָ������ͬ����Ƶ�����������Ż����ŵ�������������������ŵ�����֮���ý���������[6]���о��ɹ�һ�£�ͬʱ��Զ־��[7-8]ָ������ת�����������ܵĿ����뵥���Ի������������Ż����������е�г��������������г�����෴Ӧ��Ӱ�죬���Ż��������ŵ�����Ҳ�Ậ����Ӧ��г���ɷ֣�ʹ�����ŵ��������ϴ���䡣����[9]��ʵ����Ҳ��֤����һ���ۡ�ͬʱ�����ŵ����Ļ��������������ת��λ���йأ����ʹ�ÿ��١�ȷ�ж����ŵ����ļ��Դ��ڽϴ����ѣ���������������ʵ��PWM����������һ����Ҫ���ݣ�����ͬ�����������£���������������������������Ż��Ļ������ŵ�ѹ�����С[10]��г���ɷ�Ҳ��������Щ���ض���Ӱ�����Ż�������Ч���������������ת�����ŵ�����ʹ����������Ĵ��������ܱ�Ŀǰ�����������������ķ����о��༯�������ཻ�����ƹ���[11-14]����������������˲��㷨�Լ���������ʱ�����ߵ�������Ҳ��Ӧ���ڴ�ͳ�ĺ㶨���ŵ�����Ӧ������ڵ��ཻ������ϵͳ���������漰����ĿǰΪֹ�����ڻ�û�г���Ļ�������ʽͬ���������/����һ�廯ϵͳװ��Ӧ�ã����ѧ�ߵ��о��༯�������ŷ�ʽ���������ܷ��棬�������г���ϵͳ��װ��ʹ�ã�����Ҳ�༯��������ϵͳ����Ƶȷ��棬�������Ż����ڵ����������������������������ȷ�ԣ���ͨ�����Ƶķ�ʽʵ�ּ���ϵͳ�������ܵĽ�һ�������������о���Ϊ�˿��١�ȷ�ػ�ȡ���Ż������ŵ������ԣ�ʵ�ֵ��ཻ������ʱ������������������Ż������������ǿ��������Ĵ�����DZ�����������߲���һ������������������ϵķ�����ͨ��ʵʱ������ŵ�������ֵ���ڵ��������ߣ�������������ǰ�ĵ�������ֵ���Ӷ���ȡ��Ϊȷ�����Ż����ŵ����Ĺ���㣬���Ż�����PWM���Ƶ���������Ч������������������������ϵļ������ϴ��ڲ���DSPоƬʵ��ʱ��Ϊ�˱�֤����㸽��ÿһ����������ֵ���ܹ�����������㣬��������������ȣ�����ƶ�������������������ϵļ�����̽������Ż��������1̨��������ʽͬ��������ʵ��ƽ̨��������ĵ��ཻ����������������������Ч�Խ�����ʵ����֤��
1 ���ཻ����������������������
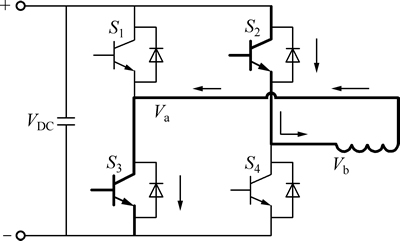
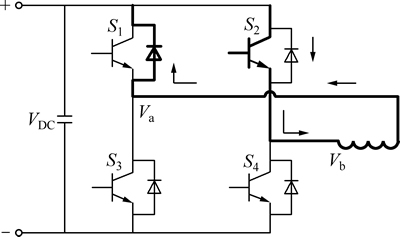
ͼ1��ʾΪ���Ż����������õ�H���������·��ϵͳͨ������H��4�����عܵ�ͨ��ʱ��ʵ�ֵ��ཻ������[15]��ͬһ�ű�����2�����ع����ǻ����Ŀ�ͨ��ضϣ��������ڿ�ͨʱ��Ҫ�Կ��ڹض�ʱ�䣬���Ϊ��ֹ״̬�л������в���ֱͨ��ɿ��ع��������л�״̬�Ĺ����м�������ʱ�䣬��ʱ��ͬһ�ű۵�2�����عܾ����ڹض�״̬�������������״̬֮ǰ�����������������ͼ2��ʾ�����ڵ�����ͻ�䣬��˵�S1�ضϽ�������״̬������ͨ������������(ͼ3)������������״̬֮ǰ���������������(��ͼ4��ʾ)ʱ����S3�رս�������״̬����������ͼ5��ʾ��
��ͼ2~5�ɼ�����ͬ�ĵ�������������״̬ʱʹ��ʩ�ӵ���Ȧ�ϵ�����ѹ��ͬ[16]����S1��S3�Ŀ�ͨ�ض����Ϊ����ͼ6��ʾΪ����ʱ�������������ε�Ӱ�졣���ϵ�������Ϊ����״̬��(����������ʱ��)S1��S3�Ŀ�ͨ���ض������źţ���������ʱ��Td��S1��S3�Ŀ�ͨ���ض������źţ���ʵ�ʴ�������ʱ��ʱ�����������������ʱʩ������Ȧ���˵ĵ�ѹ�����Լ�����������ʱʩ������Ȧ���˵ĵ�ѹ���Ρ���ͼ6�ɼ����ڲ�����IGBT��ͨ���ضϵ�ʱ����������£������������������ʱ����Ҫ����Tdʱ�������ѹ��������������ʱ����Ҫ��ȥTdʱ�������ѹ����ˣ�Ҫ��ȷ��������ѹ�Ե��ཻ��������ɵ�Ӱ�죬��Ҫ������Ҫȷ����������Ż���������ĵ������ԣ�Ҳ����Ҫ֪�����ŵ����Ĺ���㡣
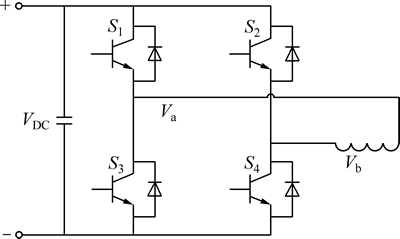
ͼ1 ����H��PWM����·
Fig. 1 PWM inverter circuit of single-phase H bridge
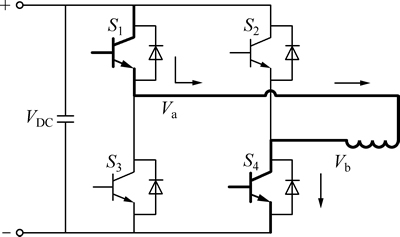
ͼ2 �������ŵ��������ڼ�ĵ���ͨ·
Fig. 2 Channel of positive excitation current during modulation
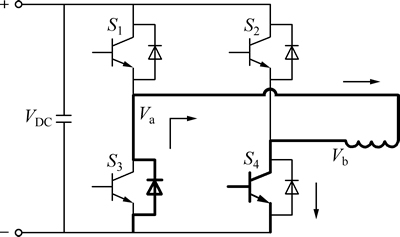
ͼ3 �������ŵ��������ڼ�ĵ���ͨ·
Fig. 3 Channel of positive excitation current during dead-time interval
ͼ4 �������ŵ��������ڼ�ĵ���ͨ·
Fig. 4 Channel of reverse excitation current during modulation
ͼ5 �������ŵ��������ڼ�ĵ���ͨ·
Fig. 5 Channel of reverse excitation current during dead-time interval
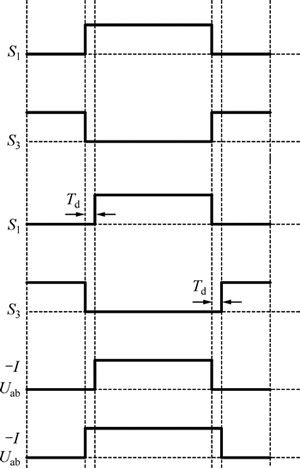
ͼ6 ����ʱ��������������ε�Ӱ��
Fig. 6 Effect of dead-time on inverter��s waveforms
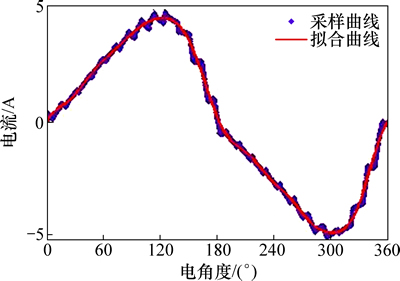
ͼ7��ʾΪ����ʽͬ������ھ�ֹ״̬�£����Ż����õ��ཻ������ʱ�Ķ������ŵ������Ρ���ͼ7���Կ����������ŵ����д��ڽ϶��г���ɷ֣����λ����Ϊ���أ��������ת�Ժ�������̶�Ҳ�����ŵ��ת�ٱ仯���仯����ˣ����ó�����������������ŵ��������ʱ�����ڽϴ�����ѣ�������ֱ���жϵ�������ֵ�ķ���ʱ��Ҳ������PWM����������Ӱ������ȷ�ж����ŵ����ڹ���㸽���ļ��ԡ�

ͼ7 ���ཻ�����ŵ�������
Fig. 7 Current waveform of single-phase AC excitation
��������������Ϊ���ܹ���Чʵ�������ֵ������λ�������µ��ཻ�����Ƶ���������������Ҫ�о�ȷ��Ч�ĵ�������������������ͼ7�ɼ�����Ȼ���ŵ������δ��ڻ��䣬���������������ʱ(��ͼ7��T1~T2����)������Ϊ�����������ڵĵ���������1�����������ź��غϣ�ֻҪ�ܹ����ݲ��������ڵĵ���������ϳ��������źŵķ��̣��Ϳ��ԶԵ�ǰ�ĵ�������ֵ�����������Ӷ�ʵ�ֵ���������ȷ�жϡ�Ҫ��������1�������źţ���ҪƵ�ʡ���ֵ����λ��ֱ��������4��������Ϊ�˼��ټ�������������Ϊ�������źŵ�Ƶ�������ŵ�ѹƵ����ͬ����ˣ�ֻ��Ҫ�Է�ֵ����λ��ֱ������3����������������㼴�ɡ�
2 ��������������㷨
����������ڵĵ����ź����ڵ���������i(t)�ķ�ֵΪI����ʼ���Ϊ�գ�ֱ������ΪD��������߿ɱ�ʾΪ

 (1)
(1)
�������Ż�������Ƶ��f��֪�����������ݼ�¼����Ϊ��֪ʱ��t0��t1������tn-1�ĵ�������ֵi0��i1������in-1ʱ��������Ϲ���ΪѰ�Ҳ���A��B��C��ʹʽ(2)�����IJв�ƽ���ͦ���С��
 (2)
(2)
��ʽ(2)Ҫ���㣺
 ��
�� ��
��
ʽ�У�A=AN/AD��B=BN/BD�� ��
��
����A��B��C��ΪI1��I2��D����С�������ֵ�����У�
��k=cos2��ftk����k=sin2��ftk��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
�� ��
�� ��
��
��Ϻ���Ϊ

 (3)
(3)
ʽ(3)��Ϊ�������������е����������������Ϻ�����ʽ�У�


��tn-1����������ŵ������ֵΪ[17-18]
 (4)
(4)
�����������ֵ�Dz�������n����������ֵ��ϵ����仯���ߺ�ó�����ˣ�������Ч���ƿ������������ֵ��ȷ�ȵĸ��ţ�ͬʱ��ֻҪ�������䳤�Ⱥ��ʣ��Ϳ������ø�����������ֵ��Ϊ���ŵ��������жϵ����ݣ���Ч���͵������λ���Թ�����жϵ�Ӱ�죬���PWM����������ȷ�ԡ�
��������������������ϼ���Ĺ����У�����������ϵ���n�����ȡ����ڿ�����AD����Ƶ�����������PWM�ز�Ƶ��ͬΪ6 kHz����ˣ�������Ƶ�ʱ仯������£���ϵ���Ҳ����֮�ı䣬������ϼ�������֮�ı䣬�⽫����Ӱ��������������ȶ��Լ���ϼ����ʵʱ�ԣ���������ŵ��������жϴ���Ӱ�첹����ȷ�ԡ���ˣ����IJ����ƶ��������ķ�������һ��������������������ϵ�������̽����Ż���
3 �ƶ���������
��������������������㷨�У���1��������ڵIJ������ݽṹ��ͼ8��ʾ��
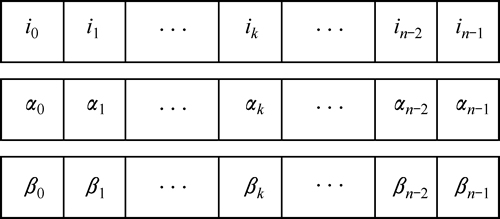
ͼ8 ��1���������ݽṹ
Fig. 8 Data structure of the first period
ͼ8��ʾ������ϵ��������߿���������tN-1������ĵ�������Ҫ����tN������ĵ������������ͼ9��ʾ�����ݡ�
��ANΪ������ʱ����㹫ʽΪ
 (5)
(5)
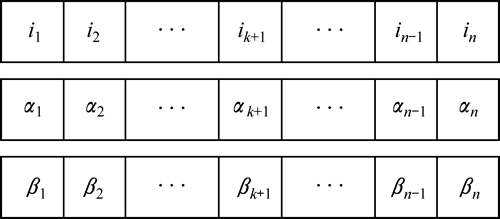
ͼ9 ��2���������ݽṹ
Fig. 9 Data structure of the second period
��ͼ8��ͼ9�ɼ�����2���������������У���t1��tn-1��n-1���������������ͬ����������Ϲ����ж�Ϊ�ۼӼ��㣬��ˣ���������ø�������������Ϣ���������������Ժ�IJ�������Ϣ����ѭ����̬���»�����ۼӺ͵ķ��������������������̣�ͬʱ����֤����ϵ����仯�������ά����ͬ�ļ���������ˣ�ʽ(5)�ɸĽ�Ϊ[19]

 (6)
(6)
����
��������������У������ۼ�����ڵ�1��������ڵ������еó�����ˣ��µ��ۼ����ֻ����ԭ���ۼ���Ļ����ϼ�ȥt0����������ֵ���ټ���tn����������ֵ���ɵõ�����ʱ���µIJ����㽫��֮ǰ����n�����еĵ㸲�ǣ�����n-1�����ݲ��䡣��ʱ���Ͽ����൱�����ݴ����ȱ��ֲ��䣬�����尴������������ƶ����������������У���n-1�������ظ���ÿ���²������������̿��Բ�����㣬���������¼����ۼ�ֵ��Ҳ����ȵ�1�������������ڽ�������ͳһ���㡣ͬʱ�����۵�����ϵ�����α仯��ֻ�е�1��������ڵ���������ͬ����Ҳ��Ч����˿��Ƴ�����������ԡ�
����ʾ��������ɼ�1�����������ڵĵ������ݣ�����MATLAB�������㷨���з�������������ͼ10��ʾ��
ͼ10 ��Ͻ��
Fig. 10 Fitted results
��ͼ10��֪������ʵ�ʹ����λ��Ϊ��Ƕ�181.457�㣬������߹����λ��Ϊ��Ƕ�181.837�㣬��6 kHz�ز�Ƶ�ʡ�100 Hz��������Ƶ���£�1��PWM���߹��ĵ�Ƕ�Ϊ6�㣬������(��Ƕ�0.38��)����Ӱ�쵽��������ʱ�Ե������Ե��ж�����
4 ʵ����֤
���������TMS320F2812оƬΪ���ĵ����Ż�������������1̨��������ʽͬ������Լ�WaveSurfer 44Xs LECROYʾ��������ſ���ʵ��ƽ̨��ϵͳ�ṹ��ͼ11��ʾ��
�������ֹʱ�����������ת�������������������⣬�Է�������������ŵ����ļ�⡣������ĸ�ߵ�ѹΪ270 V���������Ż�������Ƶ��Ϊ100 Hz�����ŵ�ѹ��ЧֵΪ190 V��������ز�Ƶ��Ϊ6 kHz������ʱ��Ϊ5 ��s����ʱ������������ѹΪ������ʱ����������ѹ��ͬʱ������ʵ��Ƚϣ�ȡ����20���Ƕȷ�Χ�ڵĵ������ݽ�����ϻ��ýϺõIJ���Ч����

ͼ11 ����ʽͬ��������ſ���ϵͳ�ṹͼ
Fig. 11 Structure of excitation control system for three-stage brushless synchronous machine
������������������£����Ż����ŵ���������������ŵ�����ʾ������Ⲩ����ͼ12��ʾ�����ø���Ҷ������ʵ������������ĵ���������ͼ13��ʾ������������������Ϸ�ʵ��������������������ͼ14��ʾ��
��ͼ12~14�ɼ���������������������ŵ������Σ����ø���Ҷ�����ķ���ʵ�ֵ��������ж�ʱ�������ܴ������������������ƣ��ܹ�������г���������ޣ���˵ó��ĵ���������ϴ��¹���㸽�����������жϴ���ʹ�����Ż����ŵ�������������أ�ͬʱ������������ŵ���Ҳ��С��������������Ϸ���ʵ����������ʱ���������λ���̶��������ʱ��С������������ŵ��������Ч������������Ĵ���DZ����ͨ��ʾ�����ɼ�ͼ12��ͼ14�����Ż����ŵ����IJ������ݣ�����MATLAB��ʵ�����ݽ��з�Ƶ���Է����Ľ����ͼ15��
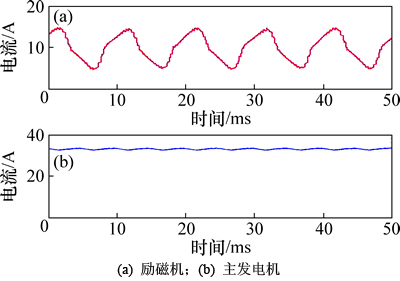
ͼ12 δ��������ʱ�ĵ�������
Fig. 12 Uncompensated current waves

ͼ13 ����Ҷ����������������ĵ�������
Fig. 13 Compensated current waves based on FFT
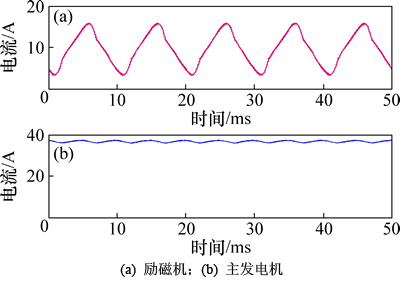
ͼ14 ��������Ϸ�����������ĵ�������
Fig. 14 Compensated current waves based on three-parameter sine wave curve-fit method
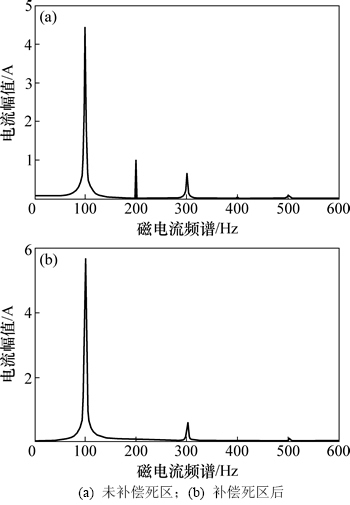
ͼ15 ���Ż����ŵ�����Ƶ����
Fig. 15 Amplitude-frequency characteristic of excitation current
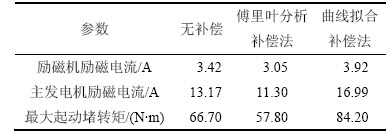
��ͼ15�ɼ��������������ǰ�����ŵ������Σ�������Ļ�����ֵ��4.5 A����5.7 A���ң��ߴ�г���ɷ־���ͬ�̶ȵؼ�С����1��ʾΪͨ�������ľ�̬����ʵ��õ������Ż����ŵ���������������ŵ������Լ�������ָ�����״̬������ͬ�����������Լ�������������ʱ����������ڶ��������µ������ת�ص�ʵ������
��1 ʵ����
Table 1 Experimental results
5 ����
1) �����һ�ֲ�������������������ϵķ����������Ż������ŵ�������ʵʱ����������ϣ��������ֵ��Ϊ�жϵ������Ե����ݣ��Ӷ���������������ȣ���һ�������ƶ��������ķ�����������������������ϵ�������̽��м���֤�������п���ƽ̨�ϵļ�����ʵ���ԣ����������ʽͬ�����������ſ���ʵ��ƽ̨���Ա��������������������������ʵ����֤��
2) �ڵ��ཻ�����ŵ������ڽϴ���������£���������������������ϵķ����ܹ�����Ч���ж����ŵ����ļ��ԣ���֤����������ȷ�ԣ��������������Լ����ø���Ҷ������ʵ������������ȣ��ܹ��Ϻõ�������Ż����ŵ����Լ����������ת�����ŵ�����������������Ĵ��������ܡ�ͬʱ�������ƶ��������ķ�ʽ������������������Ϲ��̽��м����Խ��ͼ���ʵ�ֵ��Ѷȣ���߿���ϵͳ���ȶ��ԡ�
�ο����ף�
[1] ���̻�. ���պ���������ϵͳ[M]. ����: �������պ����ѧ������, 2005: 17-18.
SHEN Songhua. Power supplies system[M]. Beijing: Beihang University Press, 2005: 17-18.
[2] ��ΰ. ���ڶ��ɻ����Ƚ����缼���о�[J]. �ɻ����, 2006(4): 64-73.
CHEN Wei. Research on advanced technologies for electric power systems for more electric aircraft[J]. Aircraft Design, 2006(4): 64-73.
[3] �±���, ������, ���㿵, ��. ͬ�����˫����ϵͳ���ཻ�����ŵ��о�[J]. �Ͼ����պ����ѧѧ��, 2003, 12(1): 621-624.
CHEN Baolin, LIU Jianhong, GU Yikang, et al. Research on single-phase AC excitation of bifunctional synchronous AC motors[J]. Journal of Nanjing University of Aeronautics &Astronautic, 2003, 12(1): 621-624.
[4] ����, �ų�, ����÷. ������ˢͬ���������ϵͳ�綯������������[J]. �������չ���ѧԺѧ��, 2012, 27(2): 187-190.
LI Yan, ZHANG Chao, WANG Dongmei. Excitation characteristic for starter/generator system working on starting process of brushless synchronous machine[J]. Journal of Naval Aeronautical Engineering Institute, 2012, 27(2): 187-190.
[5] ������. ���ڿ���ת�任����ͬ�������ˢ�����о�[D]. �Ͼ�: �Ͼ����պ����ѧ�Զ���ѧԺ, 2008: 5-9.
HUANG Xiaoge. Research on synchronous generator brushless excitation based on rotating converter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Automation Engineering, 2008: 5-9.
[6] ���㿵. ���ʽ��ˢ����ͬ��������������о�[D]. �Ͼ�: �Ͼ����պ����ѧ�Զ���ѧԺ, 2002: 3-4.
GU Yikang. Research on the new start scheme for brushless electro-magnetic synchronous AC motor[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Automation Engineering, 2002: 3-4.
[7] ��Զ־. ��ת������ʽ����ͬ��������̵��о�[D]. �Ͼ�: �Ͼ����պ����ѧ, 2007: 4-6.
CAO Yuanzhi. Research on the starting process of rotating-rectifier brushless synchronous generator[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. College of Automation Engineering, 2007: 4-6.
[8] ���, ������. ��ת������ʽ��ˢ����ֱ�������г�����෴Ӧ�о�[J]. �Ͼ����պ����ѧѧ��, 2000, 32(3): 257-262.
WANG Jin, YAN Yangguang��Study on harmonic armature reaction of brushless AC & DC generator[J]. Journal of Nanjing University of Aeronautics &Astronautic, 2000, 32(3): 257-262.
[9] ����, ������, �����, ��. һ������ʽ������ˢͬ��������Ʋ���[J]. ��������ѧ��, 2012, 16(11): 29-32.
MA Peng, LIU Weiguo, LUO Guangzhao, et al. Starting control strategy for three-stage aviation brushless synchronous motor[J]. Electric Machines and Control, 2012, 16(11): 29-32.
[10] ������, ��Ҷ��. �����Ե�ѹ��������������Ӱ�켰�䲹��[J]. �繤����ѧ��, 2007, 22(5): 117-122.
LIU Junfeng, LI Yesong. Dead-time influence on output error of voltage source inverter and compensation[J]. Transactions of China Electrotechnical Society, 2007, 22(5): 117-122.
[11] ������, ���濵. �����ŷ�ϵͳ���������ЧӦ�����벹���·���[J]. �й��������ѧ��, 2008, 28(21): 46-50.
LIU Dongliang, HE Yikang. Analysis and compensation of AC servo system on inverter dead-time effect[J]. Proceedings of the CSEE, 2008, 28(21): 46-50.
[12] �ܻ�ΰ, �����, �Է�, ��. һ����ӱ�ĵ�ѹԴ���������Ӧ������������[J]. �й��������ѧ��, 2011, 31(24): 26-32.
ZHOU Huawei, WEN Xuhui, ZHAO Feng, et al. A novel adaptive dead-time compensation strategy for VSI[J]. Proceedings of the CSEE, 2011, 31(24): 26-32.
[13] ���ٷ�, ��ΰ, ��Ӿ, ��. ����Ӧ�˲��ڵ���ʸ���������������е�Ӧ��[J]. �繤����ѧ��, 2009, 24(7): 65-69.
YANG Rongfeng, CHEN Wei, YU Yong, et al. Adaptive filter application in current vector dead time compensation[J]. Transaction of China Electrotechnical Society, 2009, 24(7): 65-69.
[14] ������, ��ѧ��, ������. һ����ӱ�Ļ�������ʱ�����ߵ����� SVPWM �����㷨[J]. �繤����ѧ��, 2009, 24(6): 42-47.
HE Zhengyi, JI Xuewu, QU Wenlong. A novel SVPWM compensation strategy based on regulating dead time online[J]. Transactions of China Electrotechnical Society, 2009, 24(6): 42-47.
[15] ����ʤ, ������. һ�ֵ���ռ�ʸ�����������Ż�����[J]. �繤����ѧ��, 2011, 26(4): 107-113.
SONG Wensheng, FENG Xiaoyun. A single phase SVPWM optimized method[J]. Transactions of China Electrotechnical Society, 2011, 26(4): 107-113.
[16] �, ����, �¼�. ����SPWM�����������ЧӦ�����Ͳ�������[J]. ��������, 2003(1): 12-17.
LI Jian, KANG Yong, CHEN Jian. Analysis and compensation strategy of dead-time effects for single-phase SPWM inverters[J]. Electric Drive, 2003(1): 12-17.
[17] ��־��, ��ý�, ��Z��. �����ź���ʧ��ȵ�һ�־�ȷ���۷���[J]. ����ѧ��, 2003, 24(2): 144-148.
LIANG Zhiguo, ZHU Jijie, SUN Jingyu. A precise evaluation method for the distortion of sinusoidal sources[J]. Acta Metrologica Sinica, 2003, 24(2): 144-148.
[18] ��־��, ��ý�, ������. �IJ�������������ϵ�һ�������㷨[J]. �����DZ�ѧ��, 2006, 27(11): 1513-1519.
LIANG Zhiguo, ZHU Jijie, MENG Xiaofeng. Convergence algorithm of four-parameter sine wave curve-fit[J]. Chinese Journal of Scientific Instrument, 2006, 27(11): 1513-1519.
[19] �ɽ�, �ް�, ����. ��DFT���������㷨����Դ�����˲���г�������Ӧ��[J]. �����Զ����豸, 2005, 25(5): 57-60.
CHENG Jian, LUO An, FU Qing. Application of simplified DFT based sliding-window iterative algorithm in APF harmonic detection[J]. Electric Power Automation Equipment, 2005, 25(5): 57-60.
(�༭ ����ƽ)
�ո����ڣ�2015-12-08�������ڣ�2016-03-29
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51277152)(Project(51277152) supported by the National Natural Science Foundation of China)
ͨ�����ߣ���������ʿ�о��������¶༶��������ˢͬ������ŷ����Ƽ���������о���E-mail��mapeng001@foxmail.com

