基于观测器的直接约束多速率鲁棒预测控制算法
马春妍,刘晓华
(鲁东大学 数学与信息学院,山东 烟台,264025)
摘要:针对多包描述线性离散不确定多速率系统,当系统状态不可测时,提出一种直接约束多速率鲁棒预测控制算法。将控制器与观测器综合设计,利用观测状态直接构造性能指标,通过求解无穷时域性能指标的最小最大优化问题,得到系统的最优状态反馈控制律。采用参数依赖Lyapunov函数,在满足输入和状态约束的情况下,保证闭环系统稳定。仿真结果验证算法的有效性。
关键词:鲁棒预测控制;多速率系统;参数依赖Lyapunov函数;状态观测器;线性矩阵不等式
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S1-0277-04
Direct constrained multi-rate robust predictive control based on state observer
MA Chun-yan, LIU Xiao-hua
(School of Mathematics and Information, Ludong University, Yantai 264025, China)
Abstract: For multi-packet described linear discrete uncertain multi-rate system, when the state can not be measured, a direct method of constrained robust model predictive control algorithm is proposed. The observer and controller are comprehensive designed, the structure performance index is built directly using observed state. Through solving the min-max optimization problem with infinite horizon performance cost, the system optimal state feedback control law is obtained. When the constrains of input/state is meet, the parameter-dependent Lyapunov function is introduced to ensure the closed-loop system stability. The effectiveness of the proposed approach is verified by simulation examples.
Key words: robust model predictive control; multi-rate system; parameter-dependent Lyapunov function; state observer; linear matrix inequality
多速率鲁棒预测控制是一种新型的预测控制,它的特点是在鲁棒预测控制理论的框架下,对控制变量更新速率和输出变量采样速率采用不同的速率。多速率采样系统[1]具有很强的实际背景,例如,聚合反应堆化工过程[2]、高纯度蒸馏装置、生物反应器、汽油辛烷质量分析等[3]。Sheng等[4]把状态空间广义预测控制算法用于双速率采样系统中,并利用小增益定理研究了闭环系统下的双速率采样广义预测控制器的鲁棒稳定性。文献[5]研究了多速率系统的状态反馈控制方法,并将其应用到HDD伺服系统中,但得到的控制器依赖采样时刻的状态估计值。在实际系统中,系统的状态是不能直接测量的,量测设备在经济上和使用性上的限制会使状态反馈在物理实现上成为不可能。因此,研究基于状态不可测的多速率鲁棒预测控制算法更具有实际意义。本文作者将控制器与观测器综合考虑,提出一种基于状态观测器的直接约束多速率鲁棒预测控制。在性能指标与控制器设计中直接利用观测状态,采用参数依赖Lyapunov函数,并使其满足鲁棒稳定性约束,将无穷时域性能指标的优化问题最终化简为min-max优化问题。在此基础上,分析所得控制器闭环系统的稳定性。
1 直接鲁棒预测控制算法
考虑下面的时变多包不确定离散系统:

 (1)
(1)
其中: ,
, ,
, 分别为系统的控制输入、状态和输出,
分别为系统的控制输入、状态和输出, 

 ,根据测量数据,可以得到双速率采样系统数据为:
,根据测量数据,可以得到双速率采样系统数据为: 和
和 。系统输入和输出约束为:
。系统输入和输出约束为:
 (2)
(2)
对于多速率采样系统(1),获得周期为mT的提升系统的状态空间模型:
 (3)
(3)
其中: ,
,

 ,
, 。根据多面体描述,得到
。根据多面体描述,得到 可由下面的多面体描述:
可由下面的多面体描述:


 ,
,
假设系统状态不可测,针对系统(3),采用如下形式的状态观测器:


 (4)
(4)
其中: 为系统的观测状态,Lp为观测器增益,定义
为系统的观测状态,Lp为观测器增益,定义 为观测误差。
为观测误差。
由于系统的状态X(k)是不可测的,因此,在性能指标中直接采用观测状态,目的是综合鲁棒预测控制器,使得系统(1)最终被驱动到原点 ,同时在每个时刻k实现:
,同时在每个时刻k实现:

 (5)
(5)
s.t. 

 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
由于输入约束与观测状态直接相关,而状态约束是相对于真实状态的约束,为了保证所设计的控制器满足系统约束,在性能指标中直接采用观测状态来设计控制器。
为了减少控制器的保守性,本文采用参数依赖Lyapunov函数:

其中: ,即存在
,即存在 ,使得:
,使得:
 ,
, 。
。
假设Lyapunov函数满足下面的鲁棒稳定性约束:

 (10)
(10)
当闭环系统稳定时,有 ,
, 。将式(10)从i=0叠加到
。将式(10)从i=0叠加到 ,得:
,得:


因此,优化问题(5)可以转化为最小化 。
。
令,则鲁棒稳定性约束式(10)等价于:

 (11)
(11)
在式(11)中省略 (等价于仅在考虑最优性时,做无误差观测状态的假设),则式(11)等价于:
(等价于仅在考虑最优性时,做无误差观测状态的假设),则式(11)等价于:
 (12)
(12)
为了增加优化的自由度,本文引入松弛矩阵G,定义标量 ,令
,令 ,
, ,利用投影定理,式(12)可以转化为下面的LMI:
,利用投影定理,式(12)可以转化为下面的LMI:
 (13)
(13)
定理1 令 是不确定系统(3)在采样时刻km的状态向量。假设系统无约束。那么,在每一采样时刻,状态反馈控制律
是不确定系统(3)在采样时刻km的状态向量。假设系统无约束。那么,在每一采样时刻,状态反馈控制律 最小化鲁棒性能指标上界
最小化鲁棒性能指标上界 。其中,状态反馈矩阵
。其中,状态反馈矩阵 ,Q>0,且W可通过求解下面的线性目标最小化问题得到的:
,Q>0,且W可通过求解下面的线性目标最小化问题得到的:
 (14)
(14)
s.t.  >0 (15)
>0 (15)
(16)
下面,基于状态观测器(4),推导出在一定条件下,可使得系统的真实状态、观测状态和观测误差都保持在同一个椭圆内部。
引理1 假设存在Q使得 ,
, ,
, ,那么,在k时刻,如果存在标量
,那么,在k时刻,如果存在标量 ,
, 和适当维数的矩阵Y,Lp以及对称正定矩阵Q,使得下面的条件满足:
和适当维数的矩阵Y,Lp以及对称正定矩阵Q,使得下面的条件满足:
 (17)
(17)
 (18)
(18)
 (19)
(19)
 (20)
(20)
 (21)
(21)
则采用控制律 后,系统(1)的真实状态、观测状态和观测误差保持在同一个椭圆内部,即:
后,系统(1)的真实状态、观测状态和观测误差保持在同一个椭圆内部,即:
 ,
,
 (22)
(22)
进一步,式(2)中输入、状态约束满足的充分条件是:
 (23)
(23)
 (24)
(24)
这样,鲁棒预测控制问题(4)~(8)被近似地转化为如下LMI优化问题:

s.t. 式(15),(16),(17)~(21),(23),(24) (25)
2 仿真例子
考虑一个顶点数为L=2的多包不确定系统:
 ,
,
 ,
,
 ,
,
其中: 为时变不确定参数。输入约束为
为时变不确定参数。输入约束为 。当m=2时,当状态不可测时,采用基于观测器的直接约束多速率鲁棒预测控制算法。取L=I和R=1。选取θ=0.05,满足0<θ<1,初始状态为
。当m=2时,当状态不可测时,采用基于观测器的直接约束多速率鲁棒预测控制算法。取L=I和R=1。选取θ=0.05,满足0<θ<1,初始状态为 。当
。当 时,分别选取观测器增益
时,分别选取观测器增益 ,得到闭环系统的状态轨迹和控制律曲线分别如图1~2所示。
,得到闭环系统的状态轨迹和控制律曲线分别如图1~2所示。
从图1可以看出,观测器增益的选取只影响闭环系统的超调量,并不影响控制器的稳定性。
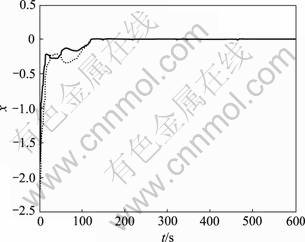
图1 观测增益为Lp1时闭环系统状态轨迹
Fig.1 State trajectory with observation gain Lp1

图2 观测增益为Lp1时控制律曲线
Fig.2 Control curve with observation gain Lp1
3 结论
针对具有约束的时变不确定多速率离散系统,给出了一种基于状态观测器的直接约束多速率鲁棒预测控制。由于系统的状态不可测,直接采用观测状态构造性能指标设计控制器,使得闭环系统在有观测误差的情况下,仍然满足输入和状态约束。在控制器设计过程中采用参数依赖Lyapunov函数,从而降低二次稳定条件存在的保守性。利用LMI方法,将无穷时域min-max优化问题转化为线性规划问题。给出了闭环控制系统稳定性条件。
参考文献:
[1] Vesely V, Rosinova D, Foltin M. Robust model predictive control design with input constraints[J]. ISA Transactions, 2010, 49: 114-120.
[2] JIA Qing-wei. A new method of multirate state feedback control with application to an HDD servo system[J]. Mechatronics, 2008, 18: 13-20.
[3] LI Dong-guang, Shah S L, CHEN Tong-wen, et al. Application of dual-rate modeling to CCR Octane quality inferential control[J]. IEEE Transactions on Control Systems Technology, 2003, 11(3): 43-51.
[4] SHENG Jie, CHEN Tong-wen, Shah S L. On stability robustness of dual-rate generalized predictive control systems[C]// Proceedings of the American Control Conference. Arlington V A, 2001: 3415-3420.
[5] JIA Qing-wei. A new method of multirate state feedback control with application to an HDD servo system[J]. Mechatronics, 2008, 18: 13-20.
[6] Kothare M V, Balakrishnan V, Morari M. Robust constrained model predictive control using linear matrix inequalities[J]. Automatica, 1996, 32(10): 1361-1379.
[7] Rossiter J A, Sheng J, Chen T, et al. Robustness of dual-rate inferential MPC systems[C]//Proceedings of the 2004 American Control Conference. Bostaon, 2004: 251-253.
[8] LI Dong-guang, Shah S L, CHEN Tong-wen, et al. Application of dual-rate modeling to CCR octane quality inferential control[J]. IEEE Transactions on Control Systems Technology, 2002, 10(1): 1-9.
[9] Rossiter J A, Shen J, Chen T, et al. Interpretations of and options in dual-rate predictive control[J]. Journal of Process Control, 2005, 15: 135-148.
(编辑 陈爱华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(61174097);山东省自然科学基金资助项目(2009ZRB01521)
通信作者:刘晓华(1959-),男,山东烟台人,教授,博士生导师,从事预测控制、自适应控制理论及应用等研究;电话:0535-6663167;E-mail: xhliu_yt@sina.com

