
DOI�� 10.11817/j.issn.1672-7207.2019.10.012
������Э���ƶ������˼�����ѧЭ�����䷽��
�ų���,��ʢ,�Ը�Ⱥ
��������ͨ��ѧ ��е����ӿ��ƹ���ѧԺ��������100044��
ժҪ:Ϊ��ȡ�������ڲ��������е�������ѧ���ܣ��Կ���ʵ�ֶ��ֲ���ģʽ���������ȸ��ϻ�����Ϊ�о��������һ����Э��ģʽ�µĻ����˶���ѧ���㷽�������ȣ�����ţ��-ŷ���������֧���Ķ���ѧ���̣��õ�֧����ƽ̨֮�����������ϵ��Ȼ�������ɲ�����ָ���붯ƽ̨�����غɷ���Ĺ�ϵ�����Ը�֧��֧���ؽ�������СΪĿ�꣬�������������Э��ģʽ��֧��λ���Լ�֧����������Э�����䷽����������ض���������Ϊ������������ļ��㷽������ʵ�������������֤���о������������������̬�������ں��������ط������ܺ����Խ��ͣ������ۼ����������������һ���ԡ�
�ؼ���:���ȸ��ϻ����ˣ���Э��ģʽ������ѧ
��ͼ�����:TH112 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2019��10-2435-11
New self-cooperation mobile robot and force coordinated distribution method
ZHANG��Chengyu, GUO��Sheng, ZHAO��Fuqun
(School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China)
Abstract: In order to obtain the optimal mechanical performance of the robot during operation, a new wheel-legged robot that can realize multiple operating modes was taken as the research object, and a robot dynamics calculation method in self-cooperation mode was proposed. Firstly, the Newton-Eulerian method was used to solve the dynamic equation of the branch, and the force relationship between the branch and the platform was obtained. Then, with consideration of the relationship between the manipulability index and the load direction of the moving platform, taking the minimum joint torque of each support branch as the object, the optimal coordination and distribution method of the branch position and support force of the robot in self-cooperation mode were proposed. Finally, the calculation and the simulation of the calculation method proposed were carried out by taking the specific operation task as an example. The results show that after orientation adjustment, the robot torque norm and energy consumption are significantly reduced, and the theoretical calculation and simulation results are consistent.
Key words: wheel-legged robot; self-cooperation mode; dynamics
���в����������ƶ��������ܹ����ƶ�ģʽ�����ģʽ���л��������߱�������ƶ������������ܹ�ͨ��ģʽ�л���ɲ�ͬ���͵IJ��������õ���Ӧ��ͬ�����븴�ӻ�������Ϊ�ƶ������������һ����չ�·���Ҳ����Խ��Խ��ѧ�ߵĹ�ע������������ѧ�����о���������˶�������ʽ�����˻������磺��ϣ�ص�[1-2]������˶�������ʽ�����˷��������о����˶�ѧ����̬���η�ʽ��������[3]�����һ��Բ�ܶԳƵ�������ʽ�����ˣ����о��䲽��ģʽ������ģʽ�µIJ�̬����Ŀǰ�Ѿ����Ƴ�������ʽ���ϻ����˴�������߱��ƶ����������߱�ͨ����������Э����ɸ��Ӳ��������������Ϊ����ƶ������˲���������������⣬ARAI��[4-5]��DING��[6-7]�Ⱥ�����˾��ƶ��Ͳ���������֧�������˵ĸ��ǰ�߶Ը�������˵����˼·��Ӧ�������������ϸ���ܣ���������NOROS-III��������ˣ�����ʵ���о����Ȳ�֧�����в����Ŀ��Ʒ�����֤�����Ȳ�֧�����ֲ�֧���л����������ʵ�ֵĿ����ԡ�����ѧ�����ǻ����������ʵ���е���Ҫ���ڣ�������ȷ�����Ļ����˶���ѧģ���ǻ����˷��桢ʵ�ֻ����˵Ŀ��Ʋ��ԡ�������������ѧ���ܱ��ֵ���Ҫ��֤��ROY��[8-9]�����㲽�л����˽��ж���ѧ��ģ����������С���˷��������ڲ����ƶ������е�֧���غɷ�������Ž⡣��ΰ���[10]����ţ��-ŷ��������һ�־��б����ṹ�����㸴��ʽ�����˽����˶���ѧ���������飬�����˻�������̬����ѧ������Ӱ�졣SHAH��[11]�����һ��ģ�黯����ʽ�����˶���ѧ��ģ�����������廮��Ϊ������д���֧����ģ�飬���ڽ����д���֧����ʽ�����˶���ѧ��ģ���������ԡ�KOMODA��[12]�Զ��ֱջ�֧�����͵���ʽ�����˽����˽�ģ���������Աȶ���ѧ�������������ģ���ʾ�˻�����������������ۼ����һ����ϵ��DING��[13]�����������շ�����������ѧģ�ͣ���ʾ������ʽ�������Ȳ��ؽ������������ƽ̨�߶�֮��Ĺ�ϵ��KOMSUOGLU��[14]��ʵ�鷽����һ��֤���˲�ͬ�����˲�̬���ܺ�֮��Ĺ�ϵ��GRAND��[15]������ʽ�������ȶ��Ժ�ǣ����ΪĿ�꣬�����һ����Ӧ�ڷ�ƽ̹���εĻ�����λ�˿��Ʒ�����֣������[16]�����������Ϊ�о���������ĵ����Ƚ��ж���ѧ�Ż������������߹�������״����⣬��������˻����˵��ȶ��ԡ�DING��[17]�о�����ʽ�������������εĽӴ���ѧ���⣬������ͬ�Ӵ�����µ���ѧģ�Ͳ���������Ӧ��ʵ����֤�����ƶ����������˷��棬��˶����[18]����ţ��-ŷ��������ʾ����ʽ�ƶ�ƽ̨���е��֮��������������������[19]��һ�ֽ½�ʽ�ij����������˶�ѧ�붯��ѧ������Ϊ����ʽ��������ʽ����ģʽ�µĶ���ѧ��ģ�ṩһ�����������ݡ���Բ�����ʽ�����ˣ����鲨��[20]��������㲢�����������߹����еĶ���ѧ������⡣XIN��[21]����Ħ��-����˹����������ڹؽڿռ�����������㲢�������˵����������µ�֧�����������⣬ʹ�������̸���Ч���������������Ƕ���ʽ�����˵Ķ���ѧ����ȡ����һ����չ�����������о���������ʽ֧������ѧ������������ƶ�ƽ̨�IJ����ֶ���ѧ���⣬���ǣ����������Ż�������ʽ�����˲���ģʽ�µĶ���ѧ�����о����Բ��㡣Ϊ�ˣ����������������ľ��ж��ֲ���ģʽ���������ȸ���ʽ�����ˣ�����ţ��-ŷ���������˻�������Э��ģʽ�µ���������ѧģ�ͣ������ݿɲ������������ۣ����һ�ֲ���ģʽ��֧��֧����λ�˵����������Ա���Ч����߲��������е���ѧ���ܡ�
1 ����������˶�ѧ����
1.1������������ģʽ����
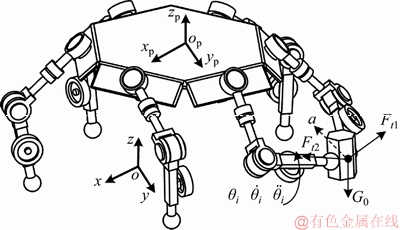
ͼ1��ʾΪ���������һ�����Ͷ����ģʽ���ȸ��ϻ����ˡ���ͼ1�ɼ�����������6��֧���붯ƽ̨���ɣ�ÿ��֧��������3��ת���ؽ���1�����ж����������֣�ÿ��ת���ؽھ�Ϊ�����ؽڣ�6��֧���ʶԳƲ��ã���ƽ̨Ϊ�������νṹ��
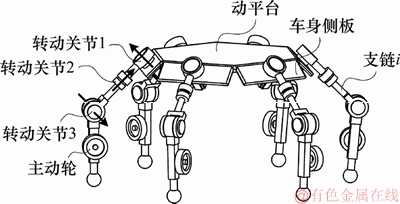
ͼ1�����ȸ��ϻ�����ģ�ͼ�ͼ
Fig. 1��Schematic description of wheel-legged compound robot
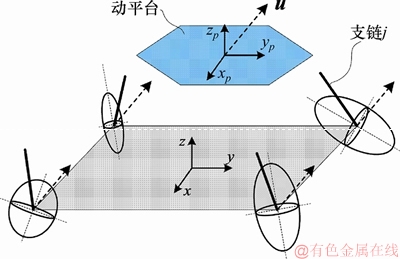
֧��������Ϊ�Ȳ�֧��֧����Ҳ������Ϊ�ֱ۲���֧��������ÿ��֧���ϴ��������֣��Ӷ�ͨ��֧�����л���������ͬʱ�߱�2��ģʽ������Э��ģʽ����ʽ�ƶ�ģʽ����ͼ2��ʾ��
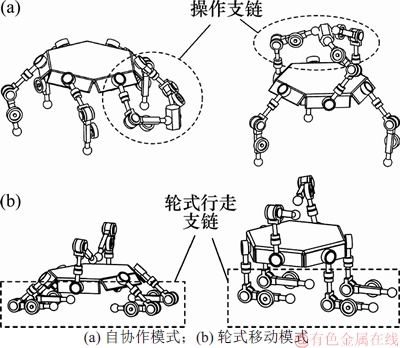
ͼ2�������˹���ģʽ
Fig. 2��Robot wheeled modes
1.2���˶�ѧ����
ͼ3��ʾΪ����������ϵ��֧���ֲ�ʾ��ͼ��ͼ3(a)�У�������ϵΪOxyz������ƽ̨����ϵΪOpxpypzp����������ԭ��Op���붯ƽ̨�������غϣ�zp�ᴹֱ�ڶ�ƽ̨���ϣ�xpָ��������ijһ�ߵ��ص㡣����ƽ̨Ϊ�߳�Ϊ2a���������νṹ������������Ϊb�������˾���6����ȫ��ͬ�ҶԳƲ��õ�֧����֧�������ͼ3(b)��ʾ��
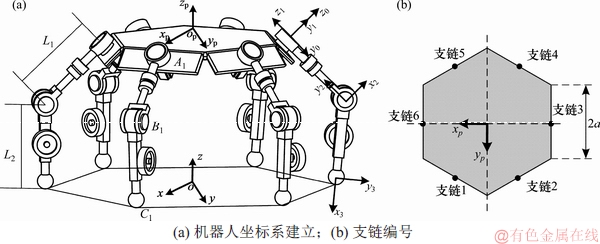
ͼ3������������ϵ��֧���ֲ�ʾ��ͼ
Fig. 3��Schematic diagram of robot coordinate system and branch distribution
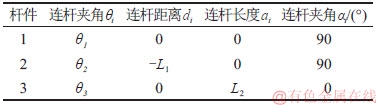
���ڵ�i��֧��(i=1,2,��,6)������Կ��������ɶȴ�����е�ۣ�֧�����˵ij��ȷֱ�ΪL1��L2��������ͼ3(a)��ʾD-H����ϵ�����������ؽڵĽǶ�Ϊ��i(i=1,2,3)�����������Ƕ�Ϊ90���135��ʱ������������任��ʽ��ͬ����ˣ�������ͬ��D-H���������1��ʾ��
��1������֧��D-H������
Table 1��D-H parameter table of series branch
֧����O0x0y0z0����ϵ�µ�λ�˱任������Ա�ʾΪ

���������Ϊ90��ʱ����i��֧��O0x0y0z0����ϵԭ����Opxpypzp����ϵ��λ�ÿ��Ա�ʾΪ



��i��֧��֧����Opxpypzp����ϵ�µ�λ��Ϊ

��֧ͬ���Ķ�Ӧ��i�����2��ʾ��
��2����֧ͬ���Ħ�i�Ƕ�
Table 2����i angle values of different branches

����������������õ������˵��ſ˱Ⱦ���ά��Ϊ(6��3)����������3���������صģ�ֵ�ÿ��ǵ����ſ˱Ⱦ����Ϸ���(3��3)���Ӿ���

ʽ�У�

2 ����ѧ��ģ
2.1��֧������ѧģ��
���������˵�������֧���Ķ���ѧģ����ͼ4��ʾ��֧��ϸ��Ϊ3�����ˣ����и����˳��ȷֱ�ΪL1��L2��L3�����������ֱ�Ϊm1��m2��m3��������Ϊ����3��һ���֣�����i�Ĺ�������������ϵi�±�ʾΪiIi��
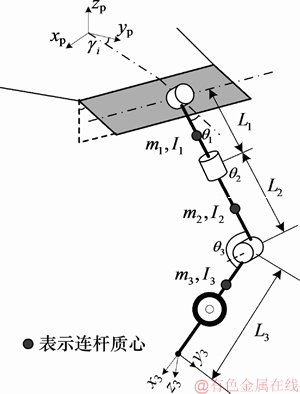
ͼ4������֧������ѧģ��
Fig. 4��Dynamic model of series branch
����ƽ̨�ij�ʼ���ٶȺͽǼ��ٶȷֱ�Ϊ ��
�� ��֧��ĩ�����ܻ������������������طֱ�Ϊ
��֧��ĩ�����ܻ������������������طֱ�Ϊ ��
�� ������ţ��-ŷ����ʽ������i������i-1֮������������������ص�����ϵʽΪ
������ţ��-ŷ����ʽ������i������i-1֮������������������ص�����ϵʽΪ
 (1)
(1)
ʽ�У� ��
�� �ֱ�Ϊi����ϵ�µ�i��֧����i-1֧�������������������أ�
�ֱ�Ϊi����ϵ�µ�i��֧����i-1֧�������������������أ� Ϊ����������i���ĵĹ�����������i����ϵ�еı�ʾ��������ת�任������ʵ������i����ϵ��i-1����ϵ�µ�ת����
Ϊ����������i���ĵĹ�����������i����ϵ�еı�ʾ��������ת�任������ʵ������i����ϵ��i-1����ϵ�µ�ת����
 (2)
(2)
���������������ڹؽ������ϵ�ͶӰ��ϵ�����ؽ�����Ϊ
 (3)
(3)
2.2����Э��ģʽ����ѧģ��
����Э��ģʽ�£�ͨ��֧��֧�������֧����Эͬ���������ܹ���ɲ������塢����ά��������ģʽ�µĶ���ѧģ�ͷ�Ϊ2�����֣�������������֧�Ų��֣���ͼ5��ʾ��Ϊ��ģ���������¼��裺
1) ֧��ĩ�������Ӵ�ʱ�����ڻ�����
2) ֧��ĩ�������ĽӴ�Ϊ����Ħ���ĵ�Ӵ��������Էֽ�Ϊ1����ֱ�ڵ����2�������ڵ������������
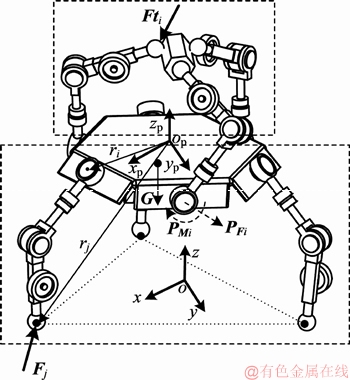
ͼ5����Э��ģʽ�»����˶���ѧģ��
Fig. 5��Dynamic model of robot in self-cooperation mode
����ţ��-ŷ��������õ��ĵ�֧������ѧ���̣����Լ���õ���i������֧��������1�Զ�ƽ̨�����������������طֱ�Ϊ ��
�� ������ת������ƽ̨���Ĵ��Ļ�����ϵ�£���
������ת������ƽ̨���Ĵ��Ļ�����ϵ�£���
 (4)
(4)
�����˵�6��֧���У� m��֧��Ϊ����֧����n��֧��Ϊ֧��֧��������֧��ĩ������������Ϊ ��֧��֧��ĩ������������
��֧��֧��ĩ������������ ��PFiΪ��i������֧���Զ�ƽ̨����������GΪ��ƽ̨������֧�������������õ��������ѧƽ�ⷽ��Ϊ
��PFiΪ��i������֧���Զ�ƽ̨����������GΪ��ƽ̨������֧�������������õ��������ѧƽ�ⷽ��Ϊ
 (5)
(5)
 (6)
(6)
��ʽ(5)��ʽ(6)�����ɾ�����ʽ��
 (7)
(7)
����



WΪ��ƽ̨���Ĵ����ܵ������������������أ����������ڸ����ϵ����ز�����ĵı仯���ı䣬��ˣ�PMi���Ե�ЧΪ�����ڶ�ƽ̨���ģ��Ӷ�W���Ա�ʾΪ

3 ������ѧ�����Ż��ĵ����㷨
���ɲ�����������[22-23]����Ӧ���ڷ��������ز����ռ䲻ͬ�������ѧ�ɲ����ԡ�������ijһ������ʱ���ɲ������������ڸ÷���ı任����Խ����ͬ�������������������ؽ�����ԽС���Ӷ��ڸ÷������ѧ����Խ�á�
����ƽ̨�����ɲ���֧�����ٶȴ��������÷�������������ʱ��֧��֧���IJ�����ʽ������ʽ(7)�о���[A]���������˸�֧����λ�ˣ��Ӷ���֧��֧������ѧ������������ҪӰ�졣�ڸ�����������Ը��ݿɲ����������ڸ���������ı仯���ʣ�����֧��֧����λ�ˣ�ʹ�ø�֧��֧�����������Ͼ��ﵽ������ѧ���ܡ�
���ǵ�j��֧��֧�������ɲ�����������ͼ6��ʾ��
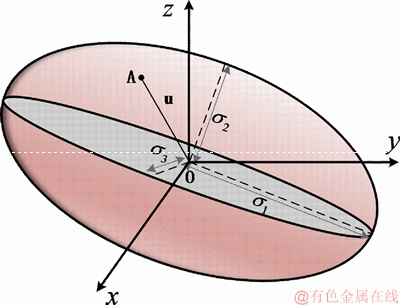
ͼ6�����ɲ���������
Fig. 6��Force manipulability ellipsoid
����������֧�����˶����ⲿ������ȷ��ʱ�����Եõ���ƽ̨�������������� �ķ�����÷���Ϊu���ڴ˷����ϵ�j��֧��֧�������ɲ����ȶ���Ϊ|OA|������Ա�ʾΪ
�ķ�����÷���Ϊu���ڴ˷����ϵ�j��֧��֧�������ɲ����ȶ���Ϊ|OA|������Ա�ʾΪ

��ÿ��֧����ĩ��������������λ�÷�Χ����ʽ(8)��ʾ������������ĩ��λ��ʱӦʹ�û�������������֧�����֧�ŵ���ɵĶ�����ڡ�
 (8)
(8)
��֧��֧����ͬһ��������ɲ�����ʾ��ͼ��ͼ7��ʾ��������ʽ(8)Լ�������£���֧��֧����u��������ɲ��������ΪĿ�꣬���ʹ�� ���Ĺؽڱ���qj��
���Ĺؽڱ���qj��
ͼ7��֧��֧�����ɲ�����ʾ��ͼ
Fig. 7��Schematic diagram of force manipulability of supporting branches
����ʽ(8)�õ����ؽڱ���qj����ɵõ���֧��λ�������Rj������ʽ(7)���֧��֧����ĩ��֧��������[F]������С������ʱ��
 (9)
(9)
�Ӷ���i��֧��֧���Ĺؽ�����Ϊ
 (10)
(10)
�����Ż��õ���֧��������ѧ�������λ�ã����ؽ����ش�����Сֵ������ֱ��������ԣ���ֹ�����¹��������س����ȣ��Ӷ������˵��ܺ�Ҳ���͡�
4 ����ѧ������
����Э��ģʽ�£�4��֧������֧�ţ�2��֧�����ڲ���ץȡ���壬ʹ�������һ���ļ��ٶȣ���ͼ8��ʾ���Ա�����������㷨ǰ���ؽ�ת�صı仯��������ܺĵIJ��졣
ͼ8����������ʾ��ͼ
Fig. 8��Schematic diagram of operating an object
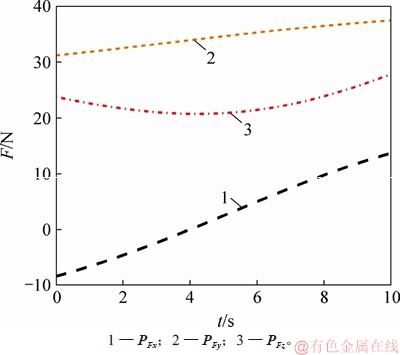
ͼ9����ƽ̨��������������
Fig. 9��Force of platform��s center of mass
������ƽ̨��a=200 mm����b=100 mm����������m1=m2=m3=1 kg��������������m0=1 kg�������˳���L1=200 mm��L2=200 mm��L3=400 mm������������������ϵ�µĹ��Ծ���Ϊ��
�������ֵ���ƽ�ⷽ��Ϊ��

���У�Ft 1��Ft 2Ϊ2������֧�������������������2������֧���������ͬ������

�������̳���10 s����ʼλ��Ϊ(0.270,0.406,0.116)��Ŀ��λ��(0.270,0.304,0.218)��������������x��y��z����ļ��ٶȷֱ�Ϊ-1.5��4.0��10.0 m/s2
4.1��δ����״̬����ֵ����
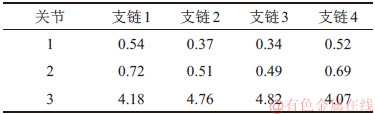
������ͨ���������������ģʽ����ָ��λ�ú�������λ�˵�������ʱ��֧��֧�������߹������Ȳ�֧����ĩ״̬λ����ɲ�������ʱ��֧��֧���ĸ��ؽڽǶ����3��ʾ��
��3��δ�����˸��ؽڽǶ�
Table 3��Angle of each joint before orientation adjustmentrad

���ݵ�֧������ѧ��������ʽ(1)������֧����ɸ�������ʱ����ƽ̨�������ܵ��������仯��ͼ9��ʾ��
����ʽ(9)��ʽ(10)�ɼ���õ�δ������̬ʱ��֧���ؽ�������ĩ��֧���������У���֧���ؽ����ر仯��ͼ10��ʾ��
4.2��������̬����ֵ����
Ϊ����ڻ����˲���������֧��֧����������ѧ���ܣ��ڻ����˵���ָ��λ�ú�������̬�������ڡ����ݶ�ƽ̨�������������� �ķ���ȷ��֧��֧���Ŀɲ������Ż�����u������ͼ10��֪���ڲ����������ķ������ʱ���ԣ���u����ʱ��仯�����ԣ�uҪ����ʱ������仯����ȷ��������С�ķ�ʱ�䷽�����������С���˷���ϵõ�����u=[U1, U1, U3]����ͼ11��ʾ��
�ķ���ȷ��֧��֧���Ŀɲ������Ż�����u������ͼ10��֪���ڲ����������ķ������ʱ���ԣ���u����ʱ��仯�����ԣ�uҪ����ʱ������仯����ȷ��������С�ķ�ʱ�䷽�����������С���˷���ϵõ�����u=[U1, U1, U3]����ͼ11��ʾ��
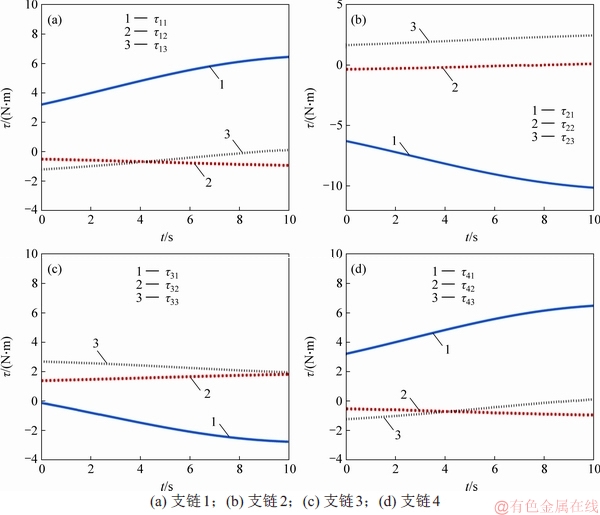
ͼ10��δ������̬ʱ��֧���ؽ����ر仯
Fig. 10��Joint torque variation of each branch before orientation adjustment
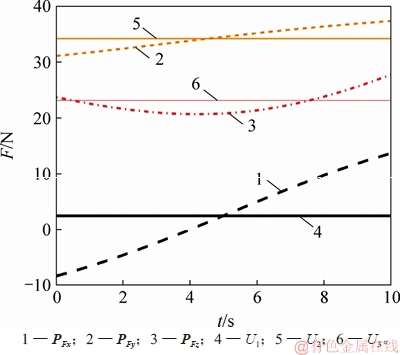
ͼ11����ƽ̨����������������֧�ŷ���ѡ��
Fig. 11��Force of platform��s center of mass and support direction
���ǻ����������ļ���Լ����ȷ����������������֧�ŷ�Χ֮�ڣ�ȷ����֧��֧��ĩ��λ�õ�Լ����Χ�����4��ʾ��
��4��֧��ĩ��λ��Լ����Χ
Table 4��Constraints of the end position of the branch mm

�������4��ʾ��Լ�������£���u����Ŀɲ��������ΪĿ�꣬�Ը�֧��֧������λ�˵�����������ĸ�֧���ؽڽ����5��ʾ��
��5������֮����ؽڽ�
Table 5��Angle of each joint after orientation adjustmentrad
����ʽ(9)��ʽ(10)�ɼ���õ����������̬���ں��֧���ؽ�������ĩ��֧��������֧���ؽ����ر仯��ͼ12��ʾ�����У���ij��ʾ��i��֧���ĵ�j���ؽڵĹؽ����ء�
4.3��������֤��Ա�
��V-rep�����жԻ����˲������̽��з��棬��֤����ǰ�����ط�����������ܺĵı仯��δ���������̬����ʱ�����˵IJ���������ͼ13��ʾ�����������̬���ں�����˵IJ���������ͼ14��ʾ��
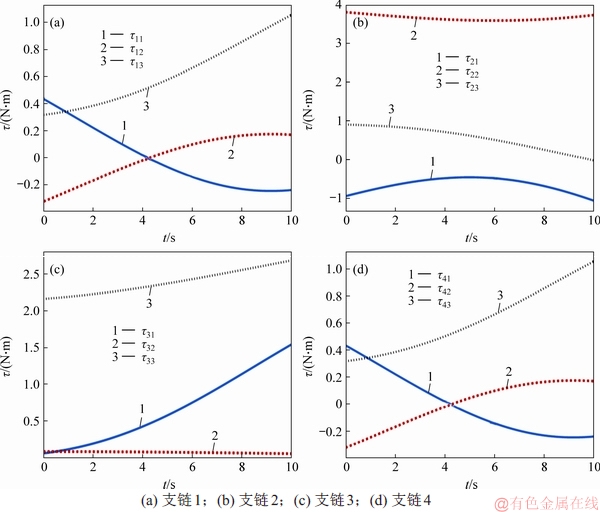
ͼ12��������̬���֧���ؽ����ر仯
Fig. 12��Joint torque variation of each branch after orientation adjustment
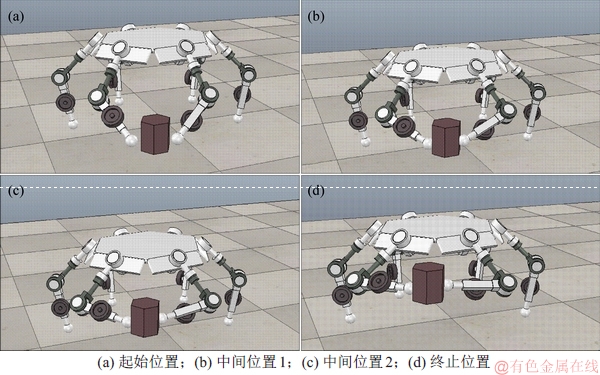
ͼ13��δ���������̬���ڲ�������
Fig. 13��Operation processes before orientation adjustment
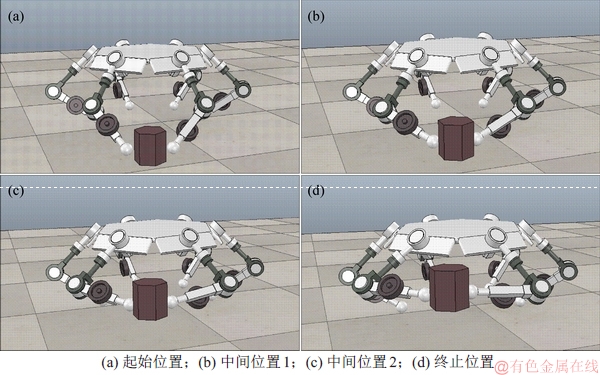
ͼ14�����������̬���ں��������
Fig. 14��Operation proceses after orientation adjustment
�Ե���λ��ǰ������˹ؽ����ط������ܺĽ��жԱȣ������ͼ15��ʾ����ͼ15�ɼ��������ͬ���غ����������£�����λ�˵������ں�Ĺؽ����ط����½���������֧�Ų��ֵ��ܺĽ���63.8%��
5 ����
1) ��������Ķ����ģʽ���ȸ��ϻ����ˣ�����ţ��-ŷ��������������������֧�Ų����ںϣ������˻�������Э������ģʽ�µ�������ѧģ�͡�
2) ���Dz���֧���Ķ���ѧӰ�죬��֧��֧���ľ���ѧ�ɲ���������ΪĿ�꣬�����һ��֧�Ų���֧��������֧�����ֲ����������÷������ܹ�ʹ�û����������λ����ɲ�������
3) ���ݾ�������ʵ����������������еĸ�֧�������ر仯������V-rep�н��з���ʵ�顣���������ۼ�������������Աȣ����֤���˱��Ķ���ѧģ�ͽ�������ȷ���������������Ч�ԡ�
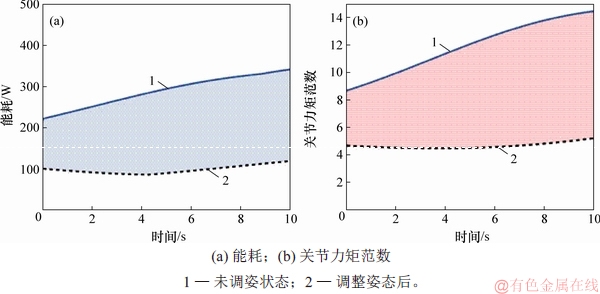
ͼ15��֧�Ų����ܺ�����ؽ����ط����Ա�
Fig. 15��Energy consumption and torque norm comparison of support part
�ο����ף�
[1] ��ϣ��, ����. һ�����ͱ�ṹ����ʽ�����˵���������[J].���ϴ�ѧѧ��(��Ȼ��ѧ��), 2009, 40(S1): 91-101.
DING Xilun, XU Kun. Design and analysis of a novel metamorphic wheel-legged rover mechanism[J]. Journal of Central South University (Science and Technology) 2009, 40(S1):91-101.
[2] ���㶫, ����, ������. ���˽½�����ʽ�����˵��˶�ѧ�벽̬����[J]. ��е����ѧ��, 2018, 54(7): 11-19.
WANG Yandong, TANG Zhao, DAI Jiansheng. Kinematics and Gait analysis of a linkage-jointed wheel-legged robot[J]. Journal of Mechanical Engineering, 2018, 54(7): 11-19
[3] ����, ֣��, ��ϣ��. ������ʽ�����˽ṹ������˶�ģʽ����[J]. �������պ����ѧѧ��, 2016, 42(1): 59-71.
XU Kun, ZHENG Yi, DING Xilun. Structure design and motion mode analysis of a six wheel-legged robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(1): 59-71��
[4] ARAI T. Robots with integrated locomotion and manipulation and their future[J]. Journal of Robotics and Mechatronics, 1997, 9(4): 251-255.
[5] TAKAHASHI Y, ARAI T, MAE Y, et al. Development of multi-limb robot with omnidirectional manipulability and mobility[C]//International Conference on Intelligent Robots and Systems. New York, USA: IEEE, 2000: 2012��2017.
[6] DING Xilun, ZHENG Yi, XU Kun. Wheel-legged hexapod robots: a multifunctional mobile manipulating platform[J]. Chinese Journal of Mechanical Engineering, 2017, 30(1): 3-6.
[7] DING Xilun, YANG Fan. Study on hexapod robot manipulation using legs[J]. Robotica, 2016, 34(2): 468-481.
[8] ROY S S, PRATIHAR D K. Dynamic modeling, stability and energy consumption analysis of a realistic six-legged walking robot[J]. Robotics and Computer-Integrated Manufacturing, 2013, 29(2): 400-416.
[9] ROY S S, SINGH A K, PRATIHAR D K . Estimation of optimal feet forces and joint torques for on-line control of six-legged robot[J]. Robotics and Computer-Integrated Manufacturing, 2011, 27(5): 910-917.
[10] ��ΰ��, �����, ����. һ�����㸴��ʽ���ڻ����˶���ѧ��ģ�����[J]. ������, 2015, 37(3): 264-270.
DONG Weiguang, WANG Hongguang, JIANG Yong. Dynamics modeling and analysis of a wall-climbing robot with biped-wheel hybrid locomotion mechanism[J]. Robot, 2015, 37(3): 264-270.
[11] SHAH S V, SAHA S K, DUTT J K. Modular framework for dynamic modeling and analyses of legged robots[J]. Mechanism and Machine Theory, 2012, 49: 234-255.
[12] KOMODA K, WAGATSUMA H. Energy-efficacy comparisons and multibody dynamics analyses of legged robots with different closed-loop mechanisms[J]. Multibody System Dynamics, 2017, 40(2): 123-153.
[13] DING Xilun, LI Kejia, XU Kun. Dynamics and wheel's slip ratio of a wheel-legged robot in wheeled motion considering the change of height[J]. Chinese Journal of Mechanical Engineering, 2012, 25(5): 1060-1067.
[14] KOMSUOGLU H, MAJUMDAR A, AYDIN Y O, et al. Characterization of dynamic behaviors in a hexapod robot[M]//Experimental Robotics. Berlin, Heidelberg: Springer, 2014: 667-684.
[15] GRAND C, BENAMAR F, PLUMET F, et al. Stability and traction optimization of a reconfigurable wheel-legged robot[J]. The International Journal of Robotics Research, 2004, 23(10/11): 1041-1058.
[16] ֣����, ţ����, ����ʥ, ��. ����Trot��̬����������˵����ȶ���ѧ���������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2015, 46(8): 2877-2883.
ZHENG Jianhua, NIU Junchuan, JIANG Minsheng, et al. Dynamic analysis and simulation of spring legs in quadruped robot based on trot gait[J]. Journal of Central South University(Science and Technology), 2015, 46(8): 2877-2883.
[17] DING Liang, GAO Haibo, DENG Zongquan, et al. Foot�Cterrain interaction mechanics for legged robots: Modeling and experimental validation[J]. The International Journal of Robotics Research, 2013, 32(13): 1585-1606.
[18] ��˶��, ���̫. ��ʽ�ƶ����������˵Ķ���ѧģ��[J]. ����ʯ�ͻ���ѧԺѧ��, 2002, 10(2): 22-27.
ZHANG Shuosheng, YU Datai. Dynamic model of wheeled mobile manipulator[J]. Journal of Beijing Institute of Petrochemical Technology, 2002, 10(2): 22-27.
[19] ����, �ɿ�, ����ǿ, ��. ȫ���ν½�ʽ�Ĵ�����ԭ��ת���˶�ѧ�붯��ѧ��ģ[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(6): 1481-1491.
DONG Chao, CHENG Kai, HU Wenqiang, et al. Kinematic and dynamic modeling of all terrain articulated tracked vehicle in process of spin steering[J]. Journal of Central South University(Science and Technology), 2017, 48(6): 1481-1491.
[20] ���鲨, �����, ����, ��. ���㲢���Ȳ��л����˶���ѧ[J]. ��е����ѧ��, 2012, 48(23): 76-82.
WANG Hongbo, XU Guiling, HU Xing, et al. Dynamics of quadruped walking robot with parallel leg mechanism[J]. Chinese Journal of Mechanical Engineering, 2012, 48(23): 76-82.
[21] XIN Guiyang, ZHONG Guoliang, DENG Hua. Dynamic analysis of a hexapod robot with parallel leg mechanisms for high payloads[C]//2015 10th Asian Control Conference (ASCC), 2015. Kota Kinabalu. New York, USA: IEEE, 2015: 1-6.
[22] BRUNO S, LORENZO S, LUIGI V, et al. Robotics modelling, planning and control[M]. London:Springer-Verlag, 2009: 152-158.
[23] LEE S. Dual redundant arm configuration optimization with task-oriented dual arm manipulability[J]. IEEE Transactions on Robotics and Automation, 1989, 5(1): 78-97.
���༭ ��������
�ո����ڣ� 2019 -01 -17; �����ڣ� 2019 -04 -05
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51875033) (Project (51875033) supported by the National Natural Science Foundation of China);
ͨ�����ߣ���ʢ����ʿ�����ڣ����»�����ѧ����������ѧ�о���E-mail��shguo@bjtu.edu.cn

