基于自抗扰技术的永磁同步电机调速方法
龙晓军1,于双和1,杨振强2,杜佳璐1
(1. 大连海事大学 信息科学技术学院,辽宁 大连,116026;
2. 大连理工大学 电气工程学院,辽宁 大连,116024)
摘要:介绍自抗扰控制技术在永磁同步电机(permanent magnet synchronous motor, PMSM)的调速系统上的应用,并利用软件MATLAB/Simulink进行仿真,将仿真结果与PID技术的控制结果进行比较。仿真结果证明:在永磁同步电机的调速系统系统中自抗扰控制技术具有很好的动、静态性能,并且对负载扰动有很好的抗干扰能力。
关键词:自抗扰控制技术;跟踪微分器;扩张状态观测器;扰动补偿;永磁同步电机
中图分类号:TP271+61 文献标志码:A 文章编号:1672-7207(2011)S1-0376-04
Speed regulation of permanent magnet synchronous motor based on active disturbance rejection control
LONG Xiao-jun1, YU Shuang-he1, YANG Zhen-qiang2, DU Jia-lu1
(1. School of Information Science and Technology, Dalian Maritime University, Dalian 116026, China;
2. School of Electrical Engineering, Dalian University of Technology, Dalian 116024, China)
Abstract: Active disturbance rejection control (ADRC) was applied to the speed control system of permanent magnet synchronous motor (PMSM). The effect was simulated in MATLAB/Simulink, and compared with that of PID control technology. The simulation results show that the speed control system of PMSM based on ADRC technology has better static and dynamic performance, and has better anti-disturbance performance to the disturbance of load.
Key words: active disturbance rejection control technology; tracking differentiator; extended state observer; disturbance compensation; permanent magnet synchronous motor
自抗扰控制器技术[1-2]是由中国科学院韩京清研究员提出的。它是由PID技术发展演变而来,继承了PID技术的优点并结合现代理论的成就,不依赖于系统的精确数学模型的新型控制技术[1]。韩京清研究员根据反馈线性化的原理设计出了扩张状态观测器[3],扩张状态观测器可以对系统内、外的未知扰动动态进行估计[4],通过扰动补偿[1]环节,将扰动对系统的影响减小,从而达到抗干扰的效果。永磁同步电机以其体积小、机构简单、转动惯量大、响应快、性能优异等特点,在交流调速系统中得到广泛的应用[5]。本文作者介绍了自抗扰控制技术在永磁同步电机调速系统上的应用,并且利用MATLAB仿真系统的动态过程,对自抗扰控制技术的动、静态性能进行验证。
1 自抗扰控制器技术
自抗扰控制器由跟踪微分器(Tracking differentiator, TD)[6]、非线性状态反馈(Nonlinear states observer feedback, NLSEF)[7]、扩张状态观测器(Extended state observer, ESO)[3]、扰动补偿(Disturbance compensation, DC)4部分组成[1],如图1所示。其中扰动的估计与补偿是自抗扰控制器的重要组成部分[1],也是自抗扰的意义所在。
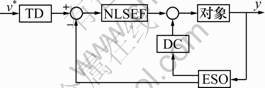
图1 自抗扰控制器的结构
Fig.1 Structure of ADRC
不依赖于系统的精确数学模型,利用误差来消除误差的控制策略,是PID控制技术的精髓,也是PID技术在工程实践中能够得到广泛应用的原因。但是,PID技术有很多不尽人意的地方:(1)原始误差的产生不合理,给定的信号可以跳变,但是对象的输出信号是连续变化的,不可以跳变;(2)微分器物理不可实现,只能通过近似的方式得到,微分信号容易被噪声污染,产生谐波;(3)对误差、误差积分、误差微分进行线性组合不一定是最好的方式;(4)工程实践表明,积分信号的引入使闭环系统变得迟钝,容易产生振荡,积分饱和引起的控制量的饱和等[1-2]。
针对PID技术的这些缺陷,自抗扰控制技术提出了相应的解决方案:(1)安排过渡工程;(2)微分信号的提取,用微分近似公式 代替近似微分
代替近似微分 ,通过二阶动态环节实现微分功能,这样可以降低噪声的放大效应;(3)误差、积分值、微分值的非线性组合;(4)扩张状态观测器和扰动补偿[1]。
,通过二阶动态环节实现微分功能,这样可以降低噪声的放大效应;(3)误差、积分值、微分值的非线性组合;(4)扩张状态观测器和扰动补偿[1]。
一阶系统的ADRC可以描述为:
跟踪微分器:
 (1)
(1)
扩张状态观测器:
 (2)
(2)
非线性状态反馈:
 (3)
(3)
控制器扰动补偿后的控制量:
 (4)
(4)
其中:v*是控制器的给定信号;v1是给定信号的跟踪信号;r是控制量增益;y是系统的输出信号;z1是输出信号的跟踪信号;z2是系统扰动的估计值;b是系统的扰动补偿;β01,β02是状态误差的反馈增益;β1是控制器增益;fal(・)是非线性函数,其表达式为:
 (5)
(5)
其中:e是误差信号;a是滤波因子,表示函数线性段的区间长度。非线性函数fal(e, a, δ)是控制工程界的选取经验,它具有“大误差,小增益;小误差,大增益”的数学特点。这种非线性函数在控制系统中的应用具有较好的鲁棒性和适应性[8-9]。
2 永磁同步电机的自抗扰控制
在同步旋转坐标系下,永磁同步电机的动态数学模型[10-11]为:
 (6)
(6)
其中:id,iq分别是d,q轴的电流;ud,uq分别是d,q轴的电压;ω是电机速度;P是磁极对数;R是定子电阻;L是d,q轴的电感;ff是磁通;B是黏性摩擦系数;TL是负载转矩;J是转动惯量。
根据自抗扰控制技术设计的控制器如下。
(1)跟踪微分器:
 (7)
(7)
(2)扩张状态观测器:
 (8)
(8)
(3)非线性状态反馈:
 (9)
(9)

图2 永磁同步电机自抗扰控制系统结构图
Fig.2 Structure of system of PMSM based on ADRC
(4)控制器扰动补偿后的控制量:
(10)
其中:ω*是系统的给定速度;ω1是给定速度的跟踪信号;ω是电机的实际转速。
3 基于自抗扰技术的永磁同步电机的调速系统仿真
利用MATLAB/Simulink进行数字仿真。仿真中所用的电机参数如下:磁极对数为4,定子电阻为17.201 Ω,d和q轴的电感为0.038 136 H,黏性摩擦系数为0.000 25 N・m/(rad・s-1),磁通为0.052 325 V/(rad・s-1),转动惯量为0.001 197 kg/m2。图2所示为基于自抗扰技术的永磁同步电机的调速系统仿真原 理图。
图3所示是给定速度为200 rad/s,额定负载时,PI控制系统与ADRC控制系统的仿真效果的比较。
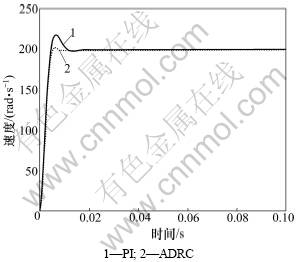
图3 给定速度为200 rad/s时额定负载时的仿真效果
Fig.3 Simulation results under given speed of 200 rad/s and rated load
由图3可以看出,在自抗扰控制系统中,速度响应的超调量小、调节时间短、波动小、静态误差小,因此具有较好的动静态性能。
图4所示是电机在给定转速为0 rad/s时,空载启动并且在t=0.3 s时突加额定负载时系统的响应曲线。
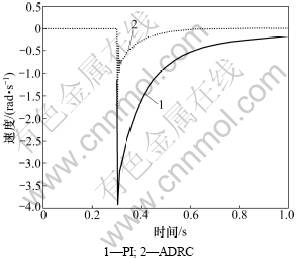
图4 给定速度为0 rad/s,空载启动,t=0.3 s突加额定负载时系统的响应曲线
Fig.4 Response curves of system under given speed of 0 rad/s, no load start and rated load at t=0.3 s
图5所示是电机在给定转速200 rad/s时,空载启动并且在t=0.3 s时突加额定负载时系统的响应曲线。
由图4和5可以看出,速度为0 rad/s和200 rad/s,当系统的负载发生变化时,自抗扰控制系统的速度波动小,抗干扰能力强;因此,自抗扰控制系统的鲁棒性较好。
在仿真的过程中需要对控制器的参数进行整定,由于ADRC技术是由PID技术发展演变而来,所以ADRC的参数调节可以参考PID的参数调节规律。式(7)的跟踪微分器中的参数r相当于PID控制器中的比例环节P,与系统的响应速度有关,值越大,响应速度越快;式(8)中扩张状态观测器的参数β01、β02则相当于PID控制器中的积分环节,与系统的静态误差有关;式(9)中非线性状态反馈中的参数β1相当于PID控制器中的微分环节,与系统的动态性能有关。虽然控制器中有较多的参数,但是参数a、δ选定好以后是不需要调节的,再根据PID的调节规律,控制器的参数就比较容易调节了。
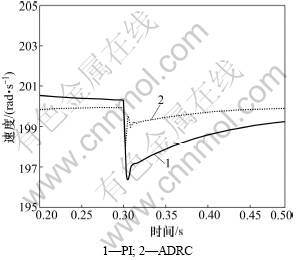
图5 给定速度为200 rad/s,空载启动,t=0.3 s突加额定负载时系统的响应曲线
Fig.5 Response curves of system under given speed of 200 rad/s, no load start and rated load at t=0.3 s
4 结论
介绍了自抗扰控制技术以及在永磁同步电动机调速系统中的应用,系统的仿真结果表明,和传统的PI调节技术相比,自抗扰控制技术具有更好的动、静态性能,鲁棒性好,并且对负载扰动有很好的抗干扰能力。
参考文献:
[1] 韩京清. 自抗扰控制技术[J]. 前沿科学, 2007(1): 24-31.
HAN Jing-qing. Active disturbances rejection control technique [J]. Frontier Science, 2007(1): 24-31.
[2] 韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002, 9(3): 13-18.
HAN Jing-qing. From PID technique to active disturbances rejection control technique[J]. Control Engineering of China, 2002, 9(3): 13-18.
[3] 韩京清. 一类不确定对象的扩张状态观测器[J]. 控制与决策, 1995, 10(1): 85-88.
HAN Jing-qing. The “extended state observer” of a class of uncertain systems[J]. Control and Decision, 1995, 10(1): 85-88.
[4] 黄一, 张文革. 自抗扰控制器的发展[J]. 控制理论与应用, 2002, 19(4): 485-492.
HUANG Yi, ZHANG Wen-ge. Development of active disturbances rejection controller[J]. Control Theory and Appliment, 2002, 19(4): 485-492.
[5] 陈伯时. 电力拖动自动控制系统[M]. 机械工业出版社, 1999.
CHEN Bo-shi. Automatio control system of electric drive[M]. Beijing: Machinery Industry Press, 1999.
[6] 韩京清, 王伟. 非线性跟踪微分器[J]. 系统科学与数学, 1994, 14(2): 177-183.
HAN Jing-qing, WANG Wei. Nonlinear tracking differentator [J]. Systems Science and Mathmatical Science, 1994, 14(2): 177- 183.
[7] 韩京清. 非线性状态误差反馈控制率-NLSEF[J]. 控制与决策, 1995, 10(3): 221-215.
HAN Jing-qing. Nonlinear state error feedback control law― NLSEF[J]. Control and Decision, 1995, 10(3): 221-215.
[8] Han J Q. Nonlinear design methods for control systems[C]//The Proc of the 14th IFAC World Congress. 1999: 521-526.
[9] GAO Zhi-qiang, HUANG Yi, HAN Jing-qing. An alternative paradigm for control system design[C]//Proceedings of IEEE Conference on Control and Decision, Orlando, 2001: 4578-4585.
[10] KE Shun-Sheng, LIN Jung-Shan. Sensorless speed tracking control with backstepping design scheme for permanent magnet synchronous motors[C]//Proceedings of the 2005 IEEE Conference on Control Applications. Toronto, Canada, 2005: 28-31.
[11] LI Yuan, HE Feng-you, GU Shan-mao. Study on sliding mode speed control with rbf network approach for PMSM drives[C]// Proceedings of 2009 IEEE International Conference on Control and Automation. Christchurch, New Zealand, 2009: 9-11.
(编辑 杨兵)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:教育部新世纪优秀人才支持计划;辽宁省科技计划资助项目;大连市科技基金资助项目;国家自然科学基金资助项目(51079013)
通信作者:于双和(1968-),男,黑龙江巴彦人,教授,从事自动控制研究;电话:0411-84723025; E-mail: shuanghe@dlmu.edu.cn

