іөБҫРьјЬПөНіУлөз¶ҜЦъБҰЧӘПтПөНіөДјҜіЙҝШЦЖ
ҙЮПюАы1, 2Ј¬Со ФА1Ј¬Ф¬ҙ«Те3
(1. ЦРДПҙуС§ Ҫ»НЁФЛКд№ӨіМС§ФәЈ¬әюДП іӨЙіЈ¬410075Ј»
2. әюДП№ӨС§Фә »ъРө№ӨіМПөЈ¬әюДП әвСфЈ¬421002Ј»
3. ҪӯЛХҙуС§ ЖыіөУлҪ»НЁ№ӨіМС§ФәЈ¬ҪӯЛХ ХтҪӯЈ¬212013)
ХӘ ТӘЈәФЪҪЁБўРьјЬәНЧӘПтПөНіХыіө¶ҜБҰС§ДЈРНөД»щҙЎЙПЈ¬·ЦОцЦч¶ҜРьјЬПөНіУлөз¶ҜЦъБҰЧӘПтПөНіРФДЬЦ®јдөДПа»Ҙ№ШПөј°Рӯөч»ъАнЈ¬МбіцөчХыЛ«ПөНіҝШЦЖІОКэөДБӘәПУЕ»Ҝ·Ҫ·ЁЈ¬¶ФЦч¶ҜРьјЬПөНіҪшРРЧФРЈХэҝШЦЖЈ¬¶Фөз¶ҜЦъБҰЧӘПтПөНіҪшРРPIDҝШЦЖЈ¬СРҫҝјҜіЙПөНіҪб№№ІОКэәНҝШЦЖІОКэөДсоәПОКМвЎЈ·ВХжҪб№ыұнГчЈ¬УлІ»јУҝШЦЖЎўөҘПөНіҝШЦЖПаұИЈ¬јҜіЙҝШЦЖПВіөБҫЧӘПтЦъБҰР§№ыФцЗҝЈ¬·ҙУҰіөБҫЧЛМ¬өДЦКРДјУЛЩ¶ИЎўәб°ЪҪЗЛЩ¶ИЎўіөЙнІаЗгҪЗөИ¶јУРГчПФМбёЯЈ¬іөБҫөДРРК»ЖҪЛіРФәНІЩЧЭОИ¶ЁРФҫщөГөҪГчПФјУЗҝЈ¬ХыіөРФДЬөГөҪМбёЯЎЈ
№ШјьҙКЈәЦч¶ҜРьјЬЈ»өз¶ҜЦъБҰЧӘПтЈ»јҜіЙҝШЦЖЈ»БӘәПУЕ»Ҝ
ЦРНј·ЦАаәЕЈәTP29Ј»U463.4 ОДПЧұкЦҫВлЈәA ОДХВұаәЕЈә1672-7207(2009)06-1593-06
Integrated control on vehicle suspension system and electric power steering system
CUI Xiao-li1, 2, YANG Yue1, YUAN Chuan-yi3
(1. School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China;
2. Department of Mechanical Engineering, Hunan Institute of Technology, Hengyang 421002, China;
3. School of Automobile and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China)
Abstract: Based on the dynamic model of vehicle suspension and steering, the relationship and harmony mechanism between active suspension system and electric power steering were analyzed. In order to study the coupling relationship of integrated systemЎҜs structure and control parameters, a combined optimize strategy to adjust parameters of two systems was proposed. The controller of active suspension system was designed using self-tuning control and the electric power steering system was designed using PID control. The simulation results show that compared with no control or single control system, integrated control can improve the controllability and stability, ride comfort, maneuverability and safety of vehicle.
Key words: active suspension; electric power steering; integrated control; combined optimize
ЛжЧЕ¶ФіөБҫІЩЧЭОИ¶ЁРФәНРРК»ЖҪЛіРФөДТӘЗуФҪАҙФҪёЯЈ¬ҙ«НіөДұ»¶ҜРьјЬТСОЮ·Ёјж№ЛЖҪЛіРФУл°ІИ«РФөДТӘЗуЎЈДҝЗ°Ј¬¶ФіөБҫЙПјҜіЙјјКхСРҫҝҪП¶аөДКЗ·Аұ§ЛАЦЖ¶ҜПөНі(ABS)ЎўЗэ¶Ҝ·А»¬ЧӘПөНі(ASR)әНЧФККУҰСІәҪПөНі(ACC)өДЧЬіЙСРҫҝ[1-4]Ј¬¶шҪ«Цч¶ҜРьјЬПөНі(ASS)әНөз¶ҜЦъБҰЧӘПт(EPS)ҪшРРјҜіЙҝШЦЖөДСРҫҝҪПЙЩ[5-7]ЎЈРьјЬЧчОӘјхХсұЈОИІҝјюЈ¬¶ФіөБҫРРК»өДЖҪОИРФј«ЖдЦШТӘЎЈ¶ҜБҰЧӘПтҝЙјхЙЩЖЈАНЈ¬МбёЯВ·ёРЈ¬ФцјУёЯЛЩ°ІИ«РФЈ¬ТтҙЛЈ¬ЧчОӘөЧЕМјҜіЙПөНіЦШТӘЧйіЙөДРьјЬУлЧӘПтөДРӯөчҝШЦЖПФөГУИОӘЦШТӘ[8-10]ЎЈОӘҙЛЈ¬ұҫОДЧчХЯ¶ФASS+EPSөДјҜіЙҝШЦЖҪшРРСРҫҝЈ¬Мбіц¶ФЛ«ПөНіөДјҜіЙУЕ»ҜІЯВФЎЈ
1 јҜіЙ¶ҜБҰС§ДЈРН
УЙУЪіөБҫРРК»ЖҪЛіРФУлРьјЬПөНіГЬЗРПа№ШЈ¬ІЩЧЭОИ¶ЁРФУлЧӘПтПөНіәНРьјЬПөНіҪфГЬПаБӘЈ¬ТтҙЛЈ¬ФЪЧЫәПҝјВЗASSәНEPSРФДЬЦёұкөД»щҙЎЙПЈ¬ҪЁБўБЛЦч¶ҜРьјЬПөНіУлөз¶ҜЦъБҰЧӘПтПөНіөДјҜіЙҝШЦЖДЈРН[11]Ј¬ДЈРНКҫТвНјИзНј1~3ЛщКҫЎЈ

Нј1 јҜіЙДЈРНё©КУНј
Fig.1 Planform of integrated model
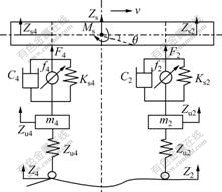
Нј2 јҜіЙДЈРНІаКУНј
Fig.2 Side elevation of integrated model

Нј3 јҜіЙДЈРНәуКУНј
Fig.3 Backsight map of integrated model
1.1 ХыіөДЈРН
ҝјВЗІаЗгУ°ПмөДЧӘПтДЈРНОӘЈә
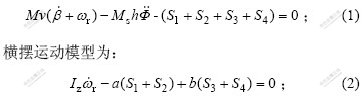

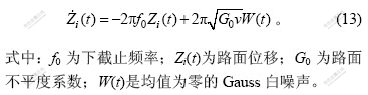
1.2 өАВ·ДЈРН
НЁіЈІЙУГТ»ҪЧВЛІЁ°ЧФлЙщЧчОӘВ·ГжКдИлДЈРНЈә
1.3 ХыіөПөНіЧҙМ¬·ҪіМ
ЧЫәПКҪ(1)~(6)Ј¬ИЎПөНіөДЧҙМ¬ұдБҝОӘ

2 јҜіЙҝШЦЖІЯВФ
ПөНі№ӨіМЦРТ»ёцЦШТӘФӯФтКЗЈәёчёцЧУПөНіРФДЬјтөҘПајУІўІ»ДЬҙпөҪХыМеРФДЬУЕ»ҜөДДҝөДЈ¬¶ФУЪіөБҫ¶аПөНіҝШЦЖТІКЗИзҙЛЎЈіөБҫІ»Н¬өДРРК»ЧҙМ¬¶ФРьјЬУРІ»Н¬өДТӘЗуЈ¬Т»°гРРК»КұРиТӘРьјЬҪПИнТФЗуКжККёРЈ¬јұЧӘНд»тЦЖ¶ҜКұУЦРиТӘРьјЬҪПУІТФЗуОИ¶ЁРФЎЈОӘРӯөч¶юХЯөДГ¬¶ЬЈ¬ТэИлјҜіЙҝШЦЖөДёЕДо(ИзНј4ЛщКҫ)[12]ЎЈҝШЦЖЧУПөНіAЛдИ»ҝЙК№ЖдРФДЬaҙу·щ¶ИЙПЙэЈ¬ө«РФДЬbКЬҝШЦЖAөДУ°ПмУРЛщҪөөНЈ»Н¬АнЈ¬ҝШЦЖЧУПөНіBТІКЗИзҙЛЎЈТтҙЛЈ¬өҘҙҝ°СПөНіAәНBЧйәПФЪТ»ЖрЈ¬ЛьГЗёчЧФРФДЬaәНbөДПтБҝәН(AЈ«B)ұИөҘёцҝШЦЖөДР§№ыҝЙДЬ»№РЎЈ¬ОӘҙЛЈ¬МбіцјҜіЙҝШЦЖ(AЎБB)өДЛјПлУГУЪРӯөчЧУПөНіјдөДПа»ҘГ¬¶ЬЈ¬ТФҙпөҪМбёЯХыіөРФДЬөДДҝөД[13]ЎЈ

Нј4 јҜіЙҝШЦЖёЕДоКҫТвНј
Fig.4 Sketch map of integrated control method
Нј5ЛщКҫОӘЧҙМ¬ұдБҝсоәПөДјҜіЙҝШЦЖФӯАнНјЎЈНјЦРЈ¬ПөНіөДКдИлОӘЧӘПтЕМЧӘҪЗҰИhәНВ·Гж°ЧФлЙщW(t)Ј¬КдіцОӘЈәәб°ЪҪЗЛЩ¶ИҰШrЈ¬іөЙнІаЗгҪЗ Ј¬іөЙнЦКРДҙ№ЦұјУЛЩ¶И
Ј¬іөЙнЦКРДҙ№ЦұјУЛЩ¶И Ј¬ј°РьјЬөД¶ҜДУ¶ИZui-ZsiәНВЦМҘөД¶ҜФШәЙKui(Zi-Zui)ЎЈЧчОӘEPSҝШЦЖәуөДКдіцЈ¬З°ВЦЧӘҪЗҰДҝЙКУОӘASSПөНіөДТ»ёцНвІҝёЙИЕКдИлЈ¬ЛьУ°ПмТэЖріөЙнЛ®ЖҪ·ҪПтХс¶ҜөДЗ°ВЦМҘІаЖ«БҰ
Ј¬ј°РьјЬөД¶ҜДУ¶ИZui-ZsiәНВЦМҘөД¶ҜФШәЙKui(Zi-Zui)ЎЈЧчОӘEPSҝШЦЖәуөДКдіцЈ¬З°ВЦЧӘҪЗҰДҝЙКУОӘASSПөНіөДТ»ёцНвІҝёЙИЕКдИлЈ¬ЛьУ°ПмТэЖріөЙнЛ®ЖҪ·ҪПтХс¶ҜөДЗ°ВЦМҘІаЖ«БҰ ЎЈФЪҙЛЈ¬МбіцөчХыЛ«ПөНіҝШЦЖІОКэөДБӘәПУЕ»Ҝ·Ҫ·ЁЈ¬НЁ№э¶ФEPSөДЦъБҰөзС№UҪшРРPIDҝШЦЖЈ¬РЮХэЦъБҰЈ¬ёДЙЖәб°ЪҪЗЛЩ¶ИөДПмУҰЈ¬МбёЯЧӘПтБйГф¶ИЈ»ФЛУГЧФРЈХэҝШЦЖЖчёщҫЭ·ҙАЎөДЧҙМ¬ұдБҝҝШЦЖЦч¶ҜРьјЬПөНіЈ¬ёДЙЖЦКРДҙ№ЦұјУЛЩ¶ИәНРьјЬ¶ҜДУ¶ИПмУҰЈ¬МбёЯіөБҫөДРРК»ЖҪЛіРФЎЈ
ЎЈФЪҙЛЈ¬МбіцөчХыЛ«ПөНіҝШЦЖІОКэөДБӘәПУЕ»Ҝ·Ҫ·ЁЈ¬НЁ№э¶ФEPSөДЦъБҰөзС№UҪшРРPIDҝШЦЖЈ¬РЮХэЦъБҰЈ¬ёДЙЖәб°ЪҪЗЛЩ¶ИөДПмУҰЈ¬МбёЯЧӘПтБйГф¶ИЈ»ФЛУГЧФРЈХэҝШЦЖЖчёщҫЭ·ҙАЎөДЧҙМ¬ұдБҝҝШЦЖЦч¶ҜРьјЬПөНіЈ¬ёДЙЖЦКРДҙ№ЦұјУЛЩ¶ИәНРьјЬ¶ҜДУ¶ИПмУҰЈ¬МбёЯіөБҫөДРРК»ЖҪЛіРФЎЈ
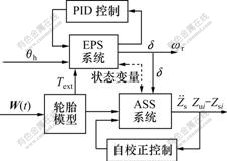
Нј5 јҜіЙҝШЦЖФӯАнНј
Fig.5 Integrated control principle diagram
3 ·ВХжјЖЛгУлҪб№ы
ФЪMATLAB/SIMULINK»·ҫіПВЈ¬¶ФІ»јУҝШЦЖЎўөҘПөНіҝШЦЖәНјҜіЙҝШЦЖ3ЦЦІ»Н¬өДЧҙҝцҪшРР·ВХжЈ¬ІЙУГ4ҪЧRunge-Kutta·ЁЈ¬јЖЛгІҪіӨОӘ0.01ЎЈ·ВХжСЎУГДіЗбРНЖыіөЈ¬ЙиЖыіөТФv=20 m/sК»№эІ»ЖҪ¶ИПөКэGq(n0)ОӘ5ЎБ10-6 m3/ЦЬөДВ·ГжЈ¬ЧӘПтЕМЧӘҪЗКдИлОӘ30?өДҪЧФҫРЕәЕЈ¬КдИлРЕәЕІЙУГВ·ГжёЯЛ№°ЧФлЙщЎЈјЩ¶ЁЧӘПтРРК»№эіМЦРёчіөВЦҙҰВ·ГжёЙИЕКдИл»ҘІ»ПаёЙ[14-15]Ј¬Фт·ВХжҪб№ыИзНј6~13әНұн1ЛщКҫЎЈ
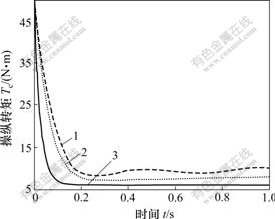
1ЎӘІ»јУҝШЦЖЈ»2ЎӘEPSөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
Нј6 І»Н¬ҝШЦЖМхјюПВөДЧӘПтЕМІЩЧЭЧӘҫШ
Fig.6 Steering wheel torque under different control conditions

1ЎӘІ»јУҝШЦЖЈ»2ЎӘEPSөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
Нј7 І»Н¬ҝШЦЖМхјюПВөДЗ°ВЦЧӘҪЗ
Fig.7 Front wheel steering angle under different control conditions

1ЎӘІ»јУҝШЦЖЈ»2ЎӘРьјЬөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
Нј8 І»Н¬ҝШЦЖМхјюПВөДЦКРДІаЖ«ҪЗ
Fig.8 Center of mass slip angle under different control conditions
1ЎӘІ»јУҝШЦЖЈ»2ЎӘРьјЬөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
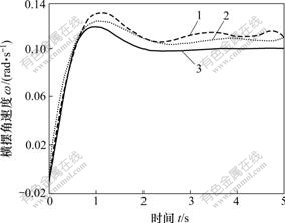
Нј9 І»Н¬ҝШЦЖМхјюПВөДіөЙнәб°ЪҪЗЛЩ¶И
Fig.9 Yaw rate velocity under different control conditions

1ЎӘІ»јУҝШЦЖЈ»2ЎӘРьјЬөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
Нј10 І»Н¬ҝШЦЖМхјюПВөДіөЙнІаЗгҪЗ
Fig.10 Rolling angle under different control conditions

1ЎӘІ»јУҝШЦЖЈ»2ЎӘРьјЬөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
Нј11 І»Н¬ҝШЦЖМхјюПВөДіөЙнҙ№ЦұјУЛЩ¶И
Fig.11 Bouncing acceleration under different control conditions

1ЎӘІ»јУҝШЦЖЈ»2ЎӘРьјЬөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
Нј12 І»Н¬ҝШЦЖМхјюПВөДіөЙнё©СцҪЗ
Fig.12 Pitching angle under different control conditions
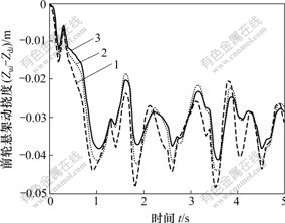
1ЎӘІ»јУҝШЦЖЈ»2ЎӘРьјЬөҘ¶АҝШЦЖЈ»3ЎӘјҜіЙҝШЦЖ
Нј13 І»Н¬ҝШЦЖМхјюПВөДЗ°ВЦРьјЬ¶ҜДУ¶И
Fig.13 Front suspension deflection under different control conditions
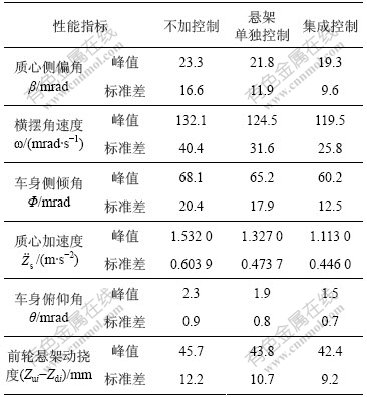
ұн1 І»јУҝШЦЖ/өҘ¶АҝШЦЖ/јҜіЙҝШЦЖ·ВХжјЖЛгҪб№ы
Table 1 No control/ASS separate control /integrated control simulate results
Нј6әННј7ЛщКҫ·ЦұрОӘЧӘПтЕМІЩЧЭЧӘҫШУлЗ°ВЦЧӘҪЗФЪ3ЦЦІ»Н¬өДҝШЦЖЗйҝцПВЈ¬¶Ф·ҪПтЕМҪЗҪЧФҫКдИлөДПмУҰЎЈҝЙјыЈ¬јҜіЙҝШЦЖПВЧӘПтЕМІЩЧЭЧӘҫШөДОИМ¬ЦөЧоРЎЈ¬З°ВЦЧӘҪЗөД·еЦөәНОИМ¬ЦөҫщЧоРЎЈ¬ЗТөҪҙпОИМ¬Кұ·ҙУҰКұјдЧо¶МЈ¬¶шІЙУГEPSөҘ¶АPIDЦъБҰҝШЦЖҙОЦ®Ј¬ЛөГчјҜіЙҝШЦЖЧӘПтЦъБҰР§№ыёьәГЎЈ
УЙНј8~10ҝЙјыЈ¬өҘ¶АРьјЬҝШЦЖәНјҜіЙҝШЦЖөДЦКРДІаЖ«ҪЗЎўәб°ЪҪЗЛЩ¶ИЎўіөЙнІаЗгҪЗөД·щЦөҫщұИІ»јУҝШЦЖКұөДТӘРЎЈ¬ЗТұд»ҜЗчКЖЗч»әЎЈҙУұн1ҝЙјыЈәјҜіЙҝШЦЖөДЦКРДІаЖ«ҪЗЎўәб°ЪҪЗЛЩ¶ИЎўіөЙнІаЗгҪЗөД·еЦөУлІ»јУҝШЦЖПаұИКұ·ЦұрјхРЎБЛ17.16%Ј¬9.54%әН11.60%Ј¬ұкЧјІојхРЎБЛ42.37%Ј¬36.15%әН38.85%ЎЈұнГчЧӘПт№эіМЦРІЩЧЭОИ¶ЁРФУРБЛГчПФМбёЯЈ¬јҜіЙҝШЦЖРФДЬЧоәГЈ¬өҘ¶АРьјЬҝШЦЖҙОЦ®ЎЈ
ҙУНј11~13ҝЙјыЈәУлІ»јУҝШЦЖКұПаұИЈ¬јҜіЙҝШЦЖәуЈ¬іөЙнҙ№ЦұјУЛЩ¶ИЎўіөЙнё©СцҪЗЎўЗ°ВЦРьјЬ¶ҜДУ¶ИөД·еЦөјхРЎ27.34%Ј¬34.18%әН7.22%Ј¬ұкЧјІојхРЎ26.15%Ј¬12.97%әН25.25%ЎЈІ»ДСҝҙіцЈ¬іөБҫөДРРК»ЖҪЛіРФТІөГөҪМбёЯЈ¬РьјЬ¶ҜДУ¶ИЎўіөВЦ¶ҜФШәЙГ»УРГчПФұд»ҜЎЈ
4 Ҫб ВЫ
a. јҜіЙҝШЦЖУлІ»јУҝШЦЖЎўөҘ¶АҝШЦЖПөНіПаұИЈ¬ЧӘПтЦъБҰР§№ыЎўІЩЧЭОИ¶ЁРФЧоәГЈ¬јҜіЙҝШЦЖТЦЦЖБЛіөЙнөДҙ№ЦұФЛ¶ҜЎўё©СцЎўІаЗгөИЧЛМ¬өДұд»ҜЈ¬іөБҫөДРРК»ЖҪЛіРФЧоУЕЎЈ
b. ұҫОДЙијЖөДјҜіЙҝШЦЖІЯВФЈ¬К№ХыіөЧЫәПРФДЬөГөҪБЛМбёЯЈ¬ҝШЦЖ·Ҫ·ЁУРР§Ј¬ҙУ¶шОӘіөБҫјҜіЙҝШЦЖөДКөіөКФСйМṩБЛІОҝјТАҫЭЎЈ
ІОҝјОДПЧЈә
[1] ҙЮәЈ·е, БхХС¶И, ОвАыҫь, өИ. »щУЪABS/ASRјҜіЙҝШЦЖПөНіөДЖыіөЖВөАЖрІҪёЁЦъЧ°ЦГ[J]. Е©»ъ»ҜСРҫҝ, 2006(8): 193-195.
CUI Hai-feng, LIU Zhao-du, WU Li-jun, et al. Hill-start assist system based on integrated control system of ABS/ASR for car[J]. Research on Agriculture Mechanization, 2006(8): 193-195.
[2] MA Yue-feng, LIU Zhao-du, QI Zhi-quan, et al. Adaptive noise cancellation method used for wheel speed signal of integrate ABS/ASR system[J]. Journal of Beijing Institute of Technology, 2006, 15(2): 144-147.
[3] ЖлЦҫИЁ, БхХС¶И, КұҝӘұу, өИ. »щУЪЖыіөABS/ASR/ACCјҜіЙ»ҜПөНіөДABSІОҝјіөЛЩИ·¶Ё·Ҫ·ЁөДСРҫҝ[J]. Жыіө№ӨіМ, 2003, 25(6): 617-620.
QI Zhi-quan, LIU Zhao-du, SHI Kai-bin, et al. Determination of vehicle reference speed for ABS based on an ABS/ASR/ACC integrated system[J]. Automotive Engineering, 2003, 25(6): 617-620.
[4] ХЕҫ°ІЁ, БхХС¶И, ЖлЦҫИЁ, өИ. »щУЪРЕПўИЪәПјјКхөДABS/ASR/ACCПөНі·ВХж[J]. јЖЛг»ъ·ВХж, 2004, 21(6): 155-158.
ZHANG Jing-bo, LIU Zhao-du, QI Zhi-quan, et al. Simulation of ABS/ASR/ACC integrated system based on information fusion technology[J]. Computer Simulation, 2004, 21(6): 155-158.
[5] Ф¬ҙ«Те, іВ Бъ, ҪӯәЖұу, өИ. Цч¶ҜРьјЬУлөз¶ҜЦъБҰЧӘПтПөНіДЈәэјҜіЙҝШЦЖ[J]. ҪӯЛХҙуѧѧұЁ: ЧФИ»ҝЖС§°ж, 2007, 28(1): 29-32.
YUAN Chuan-yi, CHEN Long, JIANG Hao-bin, et al. Fuzzy integrated control of active suspension and electrical power steering system[J]. Journal of Jiangsu University: Natural Science Edition, 2007, 28(1): 29-32.
[6] НхЖ䶫, ҪӘОд»Ә, іВОЮО·, өИ. Цч¶ҜРьјЬәНөз¶ҜЦъБҰЧӘПтПөНі»ъРөУлҝШЦЖІОКэјҜіЙУЕ»Ҝ[J]. »ъРө№ӨіМС§ұЁ, 2008, 44(8): 67-72.
WANG Qi-dong, JIANG Wu-hua, CHEN Wu-wei, et al. Simultaneous optimization of mechanical and control parameters for integrated control system of active suspension and electric power steering[J]. Chinese Journal of Mechanical Engineering, 2008, 44(8): 67-72.
[7] Harada M, Harada H. Analysis of lateral stability with Integrated control of suspension and steering system[J]. JSAE Review, 1999, 20(4): 465-471.
[8] Tanaka H, Inoue H, Iwata H. Development of a vehicle integrated control system[C]//Proceeding of the XXIV FISITA Congress. London, 1992: 63-72.
[9] Wallentowitz H. Integrated of chassis and traction control systems[C]//Proceeding of AVECЎҜ92. Yokohama, 1992: 1-7.
[10] Sato S, Inoue H, Tabata M, et al. Integrated chassis control system for improved vehicle dynamics[C]//Proceeding of AVECЎҜ92. Yokohama, 1992: 413-418.
[11] Yoshimura T, Emoto Y. Steering and suspension system of a full car model using fuzzy reasoning based on single input rule modules[J]. Int J Vehicle Autonomous Systems, 2003, 1(2): 237-246.
[12] ЧҜјМөВ. ЖыіөөзЧУҝШЦЖПөНі№ӨіМ[M]. ұұҫ©: ұұҫ©Ан№ӨҙуС§іц°жЙз, 1998.
ZHUANG Ji-de. Engineering of automotive electronic control system[M]. Beijing: Beijing Institute of Technology Press, 1998.
[13] Ghoneim Y A, Lin W C, Sidlosky D M, et al. Integrated chassis control system to enhance vehicle stability[J]. International Journal of Vehicle Design, 2000, 23(1): 124-144.
[14] Рм ҝӯ. »щУЪLMSДЈәэ/PDЛг·ЁөДЧӘПтУлРьјЬПөНіјҜіЙҝШЦЖСРҫҝ[D]. ХтҪӯ: ҪӯЛХҙуС§ЖыіөУлҪ»НЁ№ӨіМС§Фә, 2006.
XU Kai. Study of integrated control on steering and suspension system based on LMS fuzzy/PD algorithm[D]. Zhenjiang: School of Automobile and Traffic Engineering, Jiangsu University, 2006.
[15] МАПюСа, БхЙЩҫь, Нх ёХ. ЙоәЈІЙҝуЙэіБІ№іҘПөНіҪЁДЈј°ЖдДЈәэҝШЦЖ·ВХж[J]. ЦРДПҙуѧѧұЁ: ЧФИ»ҝЖС§°ж, 2008, 39(1): 128-130.
TANG Xiao-yan, LIU Shao-jun, WANG gang. Modeling of heave compensation system for deep-ocean mining and its simulation of fuzzy logical control[J]. Journal of Central South University: Science and Technology, 2008, 39(1): 128-130.
КХёеИХЖЪЈә2009-02-11Ј»РЮ»ШИХЖЪЈә2009-07-15
»щҪрПоДҝЈәәюДПКЎҝЖјјМьјЖ»®ПоДҝ(2008GK3038)Ј»әюДПКЎЧФИ»ҝЖС§»щҪрЧКЦъПоДҝ(09JJ3112)
НЁРЕЧчХЯЈәҙЮПюАы(1962-)Ј¬Е®Ј¬әюДПәвСфИЛЈ¬ҪМКЪЈ¬І©КҝСРҫҝЙъЈ¬ҙУКВіөБҫ¶ҜМ¬РФДЬДЈДвУлҝШЦЖСРҫҝЈ»өз»°Јә13973468260Ј»E-mail: l618c@163.com

