

DOI: 10.11817/j.issn.1672-7207.2021.04.015
基于状态反解的开关磁阻电机功率变换器故障诊断
刘勇智1,聂恺2,王熔基2,管振水3
(1. 空军工程大学 航空工程学院,陕西 西安,710038;
2. 空军工程大学 研究生院,陕西 西安,710038;
3. 93705部队,河北 遵化,064200)
摘要:为提高开关磁阻电机不对称半桥功率变换器可靠性,提出一种基于状态反解的故障诊断方法。首先,在保证系统正常运行的基础上改变传统电流传感器安装位置;其次,根据开关管的故障会导致相电流解算值和真实值出现偏差的特点建立开关管状态求解模型;第三,再利用设定的取舍规则确定开关管真实状态;最后结合开关管驱动信号,通过建立的故障表准确定位故障。研究结果表明:该方案对单相双管故障、多相混合故障均有故障定位能力,有效提升了诊断范围;方案不受电机相数和控制方式的限制,具有较好的通用性。
关键词:开关磁阻电机;功率变换器;故障诊断;电流传感器;状态反解
中图分类号:V242.44 文献标志码:A 开放科学(资源服务)标识码(OSID)
文章编号:1672-7207(2021)04-1185-12
Fault diagnostic for power transistors in power converter of switched reluctance motor drive based on state inverse solution
LIU Yongzhi1, NIE Kai2, WANG Rongji2, GUAN Zhenshui3
(1. School of Aeronautical Engineering, Air Force Engineering University, Xi'an 710038, China;
2. School of Graduate, Air Force Engineering University, Xi'an 710038, China;
3. Unit 93705, Zunhua 064200, China)
Abstract: In order to improve the reliability of asymmetric half bridge power converter of switched reluctance motor drive, a fault diagnosis method based on state inverse solution was proposed. Firstly, on the basis of ensuring the normal operation of the system, the traditional installation position of current sensors was changed. Secondly, according to the characteristics that the fault of transistors will lead to the deviation between the calculated value of phase current and the actual value, the state solution model of transistors was established. Thirdly, a rule of trade-off used to determine the actual state of transistors was determined. Finally, the fault could be accurately located through fault look-up table established by combining with the driving signal of transistors. The results show that the scheme has the fault location ability for single-phase double transistors fault and multi-phase mixed fault, which effectively improves the diagnosis ranges, and it is not limited by the number of phases and control mode of system, and has good universality.
Key words: switched reluctance motor; power converter; fault diagnosis; current sensor; state inverse solution
开关磁阻电机(switched reluctance motor, SRM)作为一种新型电机,具有结构简单、坚固,系统运行效率高[1-2],鲁棒性好且具有一定容错能力的优势[3-4]。以SRM为核心的开关磁阻电机调速系统在电动汽车、航空航天以及家电领域都具有较好的经济指标和运行特征,在电气传动领域占据越来越重要的地位[5-7]。
由于SRM常在高温和高振动等恶劣环境下工作,可能发生多种故障[8-9]。对于安全关键系统,若得不到及时处理,则微小的故障也可能导致重大的人员和财产损失[10]。因此,为提高系统可靠性,电机的控制系统应具备在发生某些故障后仍能使电机正常运行的容错控制能力。为此,系统首先应具备良好的故障诊断功能,对故障进行精准的识别定位[11]。
功率变换器是SRM调速系统中可靠性最薄弱的环节[12],功率开关管在过电流、过电压以及由高频开关导致的过热状态下极易发生故障。因此,研究功率变换器的故障诊断对提高SRM调速系统可靠性具有重要意义。目前,针对功率变换器的故障诊断方法主要分为电流频谱分析[13-14]、电流分析[15-17]、驱动信号辅助[12, 18-20]和带故障诊断功能的电流重构方法[21-22]等。杨文浩等[13]提出一种将k-邻近算法和极限学习机相结合的自适应滑窗诊断方法,但该方法应用于在线诊断时难以保证实时性要求;甘醇等[14]以故障前后相电流小波包节点能量离散度为故障特征来判断故障类型,并准确定位短路故障位置,但方案对双管同时短路和上管单独短路2种不同的故障没有区分性;RO等[15]对四相电流进行坐标转换,通过d-q轴电流分布样式即可诊断多种故障,故障特征明显,但该方案对双管同时短路没有区分性且只适用于偶数相电机;YANG等[17]提出了一种混合逻辑判断模型,由三相电流和驱动信号作为模型的输入,理论上可以由模型输出值和实际值之间的残差实现短路故障诊断,但需增加1个电流传感器且仅能对短路故障进行诊断;CHEN等[12,19]通过配置额外电流传感器,使得检测电流在各种故障情况下的输出不同,将输电流出与位置信号配合,实现对故障的混合逻辑判断。但是此方案诊断范围有限;XU等[18]利用各桥臂中性点电压随各相绕组工作状态切换而不断变化的规律,以中性点电压符号与驱动信号之间的逻辑关系为故障特征,实现了在不添加额外的电流或电压传感器的情况下,对变换器中的功率开关管的故障诊断;CHEN等[20]将3个电流传感器进行重新排布,提取到鲜明的短路和开路故障特征,进而利用驱动信号辅助,建立了故障特征的数学模型和故障字典,但该方案在多相同时短路故障下易发生误判;PENG等[21]提出了一种全新的电流传感器配置方式,通过在相电流重叠区改变PWM的施加周期和数模转换的时机,仅需2个传感器即可实现对四相SRM的控制以及故障诊断,但仅可适用于VPWM控制;HAN等[22]使用虚拟电流传感器实现了双传感器对短路故障下三相电流的检测,但其以励磁状态下的电流斜率为故障特征,容易在负载突变和不同转速下产生误判。
综上所述,在保证诊断方法具备良好的实时性和准确性的前提下,为进一步提高诊断范围,本文作者以不对称半桥式(asymmetric bridge, ASB)功率变换器为研究对象,提出了一种基于状态反解的诊断方法。与常见诊断方法相比,该方案不受系统控制方式和电机相数限制,具有更宽的诊断范围和更好的准确性且不会给控制器造成过大的运算负担。此外,该方案的创新之处在于其可以直接在线获取功率开关管的真实开关状态,因此其在其他需要电流反馈的电力电子系统的故障诊断领域中也具有一定的参考价值,具有较好的可扩展性。
1 ASB功率变换器及其故障模式
1.1 ASB功率变换器
三相ASB功率变换器拓扑结构如图1所示。由图1可见:各相桥臂由2个功率开关管和2个续流二极管组成,电流传感器直接测量绕组电流,相间运行相互独立。每相的2个开关管可组成4种开关状态,对应了各相的4种不同工作状态,以A相为例,4种电流路径如图2(a)~(d)所示,分别为励磁、下续流、上续流和退磁状态,为方便叙述,将4种状态分别命名为ST1,ST2,ST3和ST4。
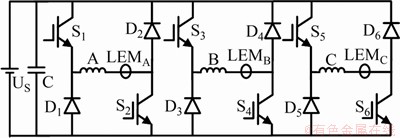
图1 ASB功率变换器拓扑结构
Fig. 1 ASB power converter topology
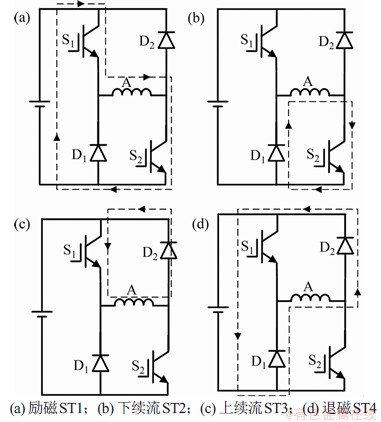
图2 A相工作状态
Fig. 2 Phase A working states
为抑制转矩脉动、减小开关损耗、减小铁耗,各相在导通区间内采用斩单管的软斩波方式,以A相为例进行说明:在导通区间内,下管S2受位置信号控制保持导通,上管S1受斩波信号控制,A相状态在ST1和ST2间不断切换;在关断区间内,两管均关断,A相状态为ST4。因此,正常工作时A相仅有ST1,ST2和ST4共3种工作状态,对应的电路平衡方程分别为:
 (1)
(1)
 (2)
(2)
 (3)
(3)
其中: 为电源电压;
为电源电压; ,
, 和
和 分别为相绕组的电流、电阻和电感;
分别为相绕组的电流、电阻和电感; 为转子位置角;
为转子位置角; 为转子角速度;
为转子角速度; 为旋转电动势,其方向在相电感上升区内与反向,在电感下降区内与同向。
为旋转电动势,其方向在相电感上升区内与反向,在电感下降区内与同向。
1.2 开关管短路故障分析
本文以1台550 W三相6/4极实验样机为仿真对象,在有限元分析软件JMAG中得到电机本体的转矩-电流-转子位置( )和磁链-电流-转子位置(
)和磁链-电流-转子位置( )数据,将其导入到MATLAB/Simulink中,搭建SRM控制系统非线性仿真模型,其中,功率变换器部分采用SimPowerSystem模块搭建,并用阶跃信号配合控制信号模拟故障。以A相为例,分析开关管故障。
)数据,将其导入到MATLAB/Simulink中,搭建SRM控制系统非线性仿真模型,其中,功率变换器部分采用SimPowerSystem模块搭建,并用阶跃信号配合控制信号模拟故障。以A相为例,分析开关管故障。
当斩波管S1短路,A相将不受斩波信号控制,在导通区间内始终保持为ST1状态。但其故障电流在不同转速下呈现出不同特点:低速运行时,电流波形如图3(a)所示,图3(b)所示为图3(a)在故障时刻的局部放大图,其中SS2是S2的控制信号,iref为参考电流,“×”表示故障时刻。
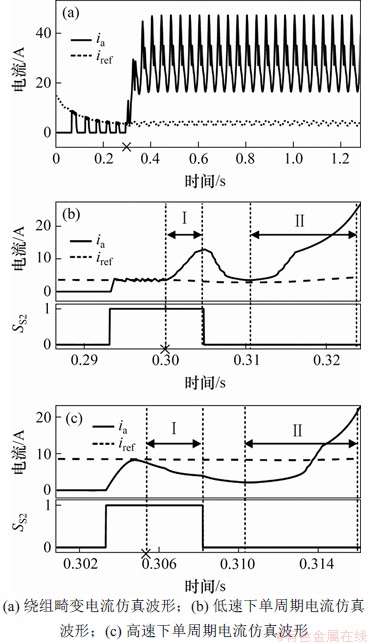
图3 S1短路故障前后电流变化
Fig. 3 Current changes before and after S1 short circuit fault
故障发生后,如图3(b)中区域Ⅰ所示,导通区间内的A相绕组电流 在电源电压作用下不断上升,摆脱参考电流的限制;区域Ⅱ中,转子处于A相关断区间的电感下降区,S1短路导致ST4被ST3代替,由式(2)可知此时的电流变化率为
在电源电压作用下不断上升,摆脱参考电流的限制;区域Ⅱ中,转子处于A相关断区间的电感下降区,S1短路导致ST4被ST3代替,由式(2)可知此时的电流变化率为
 (4)
(4)
由于旋转电动势为负,故此时电流变化率 为正,相电流上升,产生制动转矩,降低系统效率。高速运行时,故障电流如图3(c)所示,区域Ⅰ中,由于正常状态下的S1在整个导通区间内始终保持开通,因此即使S1短路,故障电流和健康状态下的相电流在导通区间内完全相同,此时没有故障特征。关断区间内,故障特征和低速运行时相同,由于ST4被ST3屏蔽,A相无法退磁,电流在旋转电动势的作用下上升,产生制动转矩。
为正,相电流上升,产生制动转矩,降低系统效率。高速运行时,故障电流如图3(c)所示,区域Ⅰ中,由于正常状态下的S1在整个导通区间内始终保持开通,因此即使S1短路,故障电流和健康状态下的相电流在导通区间内完全相同,此时没有故障特征。关断区间内,故障特征和低速运行时相同,由于ST4被ST3屏蔽,A相无法退磁,电流在旋转电动势的作用下上升,产生制动转矩。
位置导通管S2短路前后的变化如图4(a)所示,图4(b)所示为图4(a)在故障时刻的局部放大。其故障特征和S1在高速状态下发生短路类似:由于正常状态下的S2在导通区间内始终保持开通,因此无论高速或低速,S2短路的故障电流在导通区间内不会立刻变化。A相关断后,S2短路故障使得相绕组维持在零电压续流状态ST2,电流不会快速下降。到达电感下降区后,由式(4)可知,故障电流仍会在旋转电动势的作用下上升。

图4 S2短路故障前后电流变化
Fig. 4 Current changes before and after S2 short circuit fault
当S1和S2同时发生短路,A相仅有ST1一种工作状态。导通区间内,A相不受斩波信号控制,电流在电源电压作用下自由上升,此时的故障特征和S1单独短路时相同。在关断区间的电感下降区,由式(1)可知,此时的电流变化率为
 (5)
(5)
由于此时的旋转电动势为负,相电流将在电源电压和旋转电动势的共同作用下快速上升,产生更大的制动电流,严重影响电机转矩平衡、系统效率大大降低。
1.3 开关管开路故障分析
S1或S2单独开路时,故障前后的变化如图5(a)所示。故障后,在导通区间内,A相立即由励磁状态进入零电压续流状态,电流在旋转电动势的作用下缓慢下降。在关断区间内,绕组进入ST4状态,在反向电压作用下快速下降为0,由于绕组无法再次被励磁,不可避免地保持为0。不同的是:若S1在工作时开路,零电压续流回路由S2和D1组成;若S2在工作时开路,零电压续流回路则由S1和D2组成。
双管同时开路时的变化如图5(b)所示,故障后绕组立即进入ST4状态,在导通区间内,在反向电源电压和旋转电动势的双重作用下快速下降并保持为0。当功率变换器中某开关管发生开路故障时,故障相因无法被励磁而停止工作,电机处于缺相运行状态,转矩输出不均衡、出力不足,严重时会损坏负载设备。
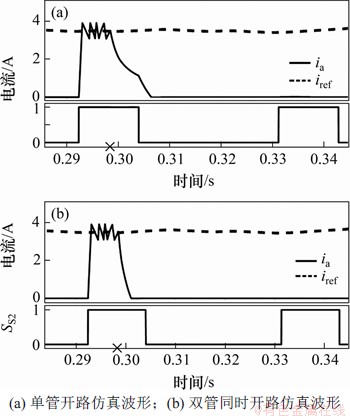
图5 功率开关管开路故障前后电流变化
Fig. 5 Current changes before and after open circuit
综上分析,开关管故障对系统运行影响显著,因此,对不同的故障类型进行准确的判断和定位对于提高系统可靠性非常有必要。
2 基于状态反解的功率开关管故障诊断方法
2.1 改进电流传感器检测位置
准确的相电流检测是SRM系统进行闭环控制的必要条件。在传统的检测位置下,不同故障往往表现出相同的故障现象,不利于故障特征的提取及故障定位。
经前面分析:S1关断后,流经D1的电流和相等;S2关断后,流经D2的电流和相等;双管同时导通时,2个二极管中均不会出现电流。可见流经二极管的续电流对开关管不同的通断组合状态的反应不同。因此,在保证准确检测各相电流、不影响系统正常工作的前提下,为实现所提出的故障诊断方法,将电流传感器LEM1~LEM4进行重新排布:LEM1~LEM3安装位置如图6(a)所示,LEM4的安装位置如图6(b)所示。图6(c)所示为各电流传感器的绕线方式。图6中, 和
和 分别为上续流和下续流总线的电流;“P”和“N”分别代表给定的正绕线方向和负绕线方向;n:2:1为绕线匝数比,则电流传感器的输出值
分别为上续流和下续流总线的电流;“P”和“N”分别代表给定的正绕线方向和负绕线方向;n:2:1为绕线匝数比,则电流传感器的输出值 ,
, ,
, 和
和 分别由式(6)~(9)给出。
分别由式(6)~(9)给出。

图6 电流传感器排布方式及检测方式
Fig. 6 Current sensors arrangement and detection method
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
2.2 电流解算方法
开关管的实际开关状态 定义为
定义为
 (10)
(10)
式中: 。
。
考虑到续流总线电流可表示为:
 (11)
(11)
 (12)
(12)
将式(11)和(12)代入到式(6)~(8)中,得
 (13)
(13)
其中: ,
, 和
和 被定义为对应相的状态系数,表达式为
被定义为对应相的状态系数,表达式为
 (14)
(14)
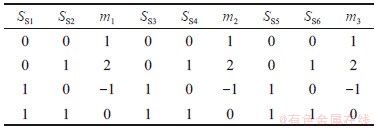
由式(14)可知:,和由开关管的通断状态完全决定,且只能在0,±1和2这4个数中取值,其具体的对应关系如表1所示。
表1 状态系数与开关管通断状态的关系表
Table 1 Relationship between state coefficients and on-off states of transistors
改写式(12)为矩阵形式,即
 (15)
(15)
不论电机工作状态如何,若使相电流解算正确,则必须保证式(15)有唯一解,因此,系数矩阵必须满足
 (16)
(16)
其中:“rank[ ]”表示矩阵的秩。
通过仿真实验证明,当n=1时,可保证式(16)在任何状态下均成立。此时,解矩阵方程式(15),得到电流传感器重新排布后的三相电流解算值 ,
, 和
和 的表达式为
的表达式为
 (17)
(17)
然而,在实际物理系统中,功率变换器各开关管的实际通断状态信息无法直接在线获取。考虑到在开关管无故障时,其实际通断状态受逻辑信号的控制,逻辑信号为高电平时导通,逻辑信号为低电平时关断。若定义开关管的逻辑信号 为
为
 (18)
(18)
式中:。
同时定义功率变换器各相控制系数为 ,
, 和
和 ,且,和由逻辑信号所决定:
,且,和由逻辑信号所决定:
 (19)
(19)
开关管无故障时,实际通断状态和逻辑信号相同,控制系数和状态系数同样保持一致。此时,可将各开关管的控制系数作为状态系数代入到式(17)中进行相电流解算。图7所示为功率变换器无故障时的相电流解算的仿真结果。从图7可知:解算值,和与真实值, 和
和 基本吻合,验证了电流传感器重新配置后,电流解算方案的正确性。
基本吻合,验证了电流传感器重新配置后,电流解算方案的正确性。
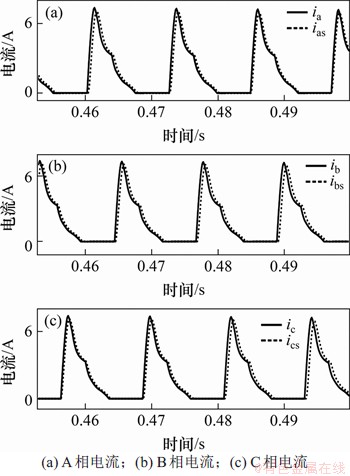
图7 功率变换器无故障时的相电流解算的仿真结果
Fig. 7 Simulation results of phase current solution for power converter without fault
2.3 开关管故障诊断方法
综上分析可知,若使相电流解算值和相电流的真实值始终保持一致,其充要条件是功率变换器控制系数和状态系数相同,即相电流的正确解算依赖于所有开关管均处于无故障状态。例如,若S2在A相单独励磁时发生开路故障,此时功率变换器的实际状态(,,)为(-1,1,1),而控制状态(,,)则为(0,1,1),此时若以控制系数代替状态系数进行电流解算,则不能保证电流解算的正确性。
在功率变换器中某开关管发生故障后,若可获取各相的状态系数,并将其与控制系数作对比,则可判断故障类型并定位故障器件。例如,若某时刻获取到状态系数=1,由表1可知,此时 和
和 均处于关断状态。若此时控制系数=0,表示和的控制信号均为高电平,亦即和在高电平导通信号的控制下仍处于关断状态,则可判断两管均发生开路故障。为便于查找故障,状态系数
均处于关断状态。若此时控制系数=0,表示和的控制信号均为高电平,亦即和在高电平导通信号的控制下仍处于关断状态,则可判断两管均发生开路故障。为便于查找故障,状态系数 、控制系数
、控制系数 和故障类型的对应关系如表2所示。
和故障类型的对应关系如表2所示。
表2 故障查找表
Table 2 Faults lookup table

由于当且仅当功率变换器无故障时,电流解算值与真实值相等,故有:
 (20)
(20)
其中: 为三相解算电流和。因此,若与之间的差值超过某一阈值时,则可判断电流解算不正确,某开关管发生故障。由表2可知为定位故障器件,需得到各相的控制系数与状态系数。各相的控制系数可由控制器输出的开关管逻辑信号直接得到,因此需进一步求取状态系数。
为三相解算电流和。因此,若与之间的差值超过某一阈值时,则可判断电流解算不正确,某开关管发生故障。由表2可知为定位故障器件,需得到各相的控制系数与状态系数。各相的控制系数可由控制器输出的开关管逻辑信号直接得到,因此需进一步求取状态系数。
由于相电流解算正确的充要条件为状态系数和控制系数的一致,即使某器件发生故障,只要保证其逻辑信号与实际通断状态一致,亦可使电流解算正确。因此,考虑利用式(15)对各相状态系数进行反解,将解得的结果代入到式(17)中,若使得与之间的差值不超过某一阈值,则认为电流解算正确,该状态系数可能为故障相的真实状态。综上,建立状态反解的数学模型为

 (21)
(21)
其中: 为可能的状态系数;与之间差值的阈值取0.05 A。
为可能的状态系数;与之间差值的阈值取0.05 A。
当与之间差值大于2 A时,认为此时电流解算不正确,功率变换器发生故障。此时,系统将采集到的电流的数字信号输入到式(21),得到功率变换器故障后,其所有可能的状态系数。
以S2发生短路故障为例进行说明。图8所示为和在S2短路瞬间的仿真波形,“×”表示故障时刻,故障后,当与之间差值大于2 A时,记录控制系数(,,)为(1,1,0),系统采集到,,和结果分别为9.438 3,6.287 0,7.023 6 A和3.886 1 A,将其代入到式(21)中,共得到4组状态解( ,
, ,
, )~(
)~( ,
, ,
, ),分别为(2,-1,0),(2,0,0),(2,1,0)和(2,2,0),仿真设置在
),分别为(2,-1,0),(2,0,0),(2,1,0)和(2,2,0),仿真设置在 ,
, ,
, 和
和 时分别将4种可能的状态系数组合代入到式(17)进行解算,仿真结果表明,在控制系数保持(1,1,0)不变的区间内,4种状态解均可使随变化。
时分别将4种可能的状态系数组合代入到式(17)进行解算,仿真结果表明,在控制系数保持(1,1,0)不变的区间内,4种状态解均可使随变化。
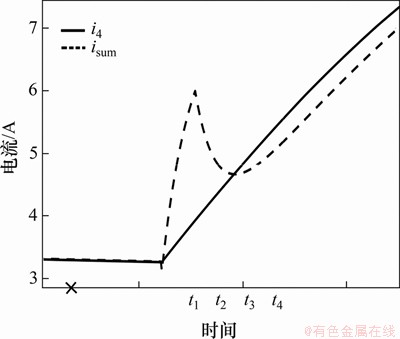
图8 S2短路前后 和
和 仿真波形
仿真波形
Fig. 8 and at moment of S2 short
然而,状态系数的反解结果与实际情况不符:仿真仅设置了S2发生短路故障,故障后的真实状态应为(2,1,0),应该仅有A相的控制系数和状态系数不一致,而反解结果中健康相也出现了2个系数不一致的现象。若系统对故障产生误诊断,则必然影响电机中健康相的运行,导致故障蔓延。因此,必须对所有可能的状态解进行合理取舍。本文通过大量仿真实验发现,尽管某一种故障导致状态解不唯一,但在所有可能的状态解中,全部都包含了该故障导致的故障所在相的状态系数的变化。例如,当S2短路,有4种状态解分别为(2,-1,0),(2,0,0),(2,1,0)和(2,2,0),这4种组合中全部都包含了 ,由于此时
,由于此时 ,将二者代入到表2中即可判断S2发生了短路。因此,状态解的取舍原则为:若所有可能解中的某相系数均相同,则将其赋给状态解
,将二者代入到表2中即可判断S2发生了短路。因此,状态解的取舍原则为:若所有可能解中的某相系数均相同,则将其赋给状态解 ,否则将该相的控制系数赋给。数学表达式为
,否则将该相的控制系数赋给。数学表达式为
 (22)
(22)
值得说明的是,为保证故障后解算电流的正确性,使开关管通断状态与其逻辑信号一致,系统将在定位故障器件后使其逻辑电平与实际通断状态保持一致。例如,在诊断S2短路后,控制其逻辑信号 始终保持为高电平。
始终保持为高电平。
综上所述,所提出的故障诊断方案的诊断流程如图9所示。
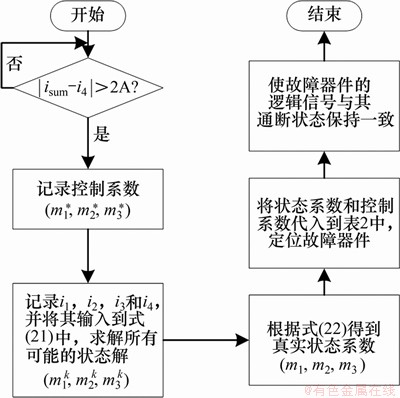
图9 故障诊断流程图
Fig. 9 Flowchart of fault diagnosis
3 实验验证
3.1 实验平台介绍
本文利用1台额定功率为550 W的三相6/4结构的开关磁阻样机对所提方案进行实验验证。图10(a)所示为实验装置结构框图。电流采样模块由精度为±0.8%的电流传感器LA-50P和采样芯片AD7006组成;为便于观测,解算电流等输出信号使用TLC5615进行D/A转换;位置传感器采用增量式旋转编码器E6B2-CWZ6C;控制系统以TMS320F28335为核心并辅以必要的高速逻辑电路,外加驱动电路,以实现基于CCC的模糊PI转速闭环控制和故障诊断功能;ASB式功率变换器中的主开关采用FQA160N08型MOSFET,并通过外部继电器控制各开关管的驱动信号,从而实现故障模拟。
控制系统框图如图10(b)所示,为避免电流解算中开关信号既作为闭环系统的输出,又作为输入,导致解算不准确,系统使用延迟环节将电流延迟1个采样周期,以保证系统的稳定。以电机定、转子不对齐位置的中点为各相转子位置的参考零点,并设定电机开通角 ,关断角
,关断角 ,给定参考转速
,给定参考转速 ,负载转矩
,负载转矩
 。
。
在所提出的诊断方案下,故障器件的逻辑电平将始终与其实际通断状态保持一致,即在故障后将始终保持为高电平或低电平。因此,通过观测各开关管的逻辑电平,即可直观获取功率变换器的故障信息。
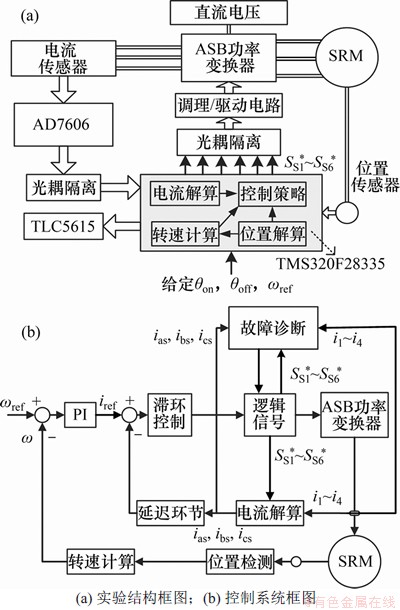
图10 实验系统框图
Fig. 10 Experimental system block diagram
3.2 系统误差的处理
实验中发现,实验的随机误差主要由各芯片的计量误差、编码器误差和电流传感器误差产生,其值随机分布且无法被消除,但总体上不影响实验结果。但实验系统误差不可被忽略,若不对系统误差进行处理,绕组电流的解算结果如图11(a)所示,电流在开关管状态切换瞬间出现较大毛刺,影响诊断结果。由文献[20]可知: ,
, 为第k个采样点的电流。若开关管驱动信号在(k+1)时刻的电流与k时刻的电流不同,而2个时刻下的电流采样值相同,则由式(17)解得的电流必然发生跳变,产生系统误差。若消除此系统误差,需在DA转换之前对电流解算值进行处理,以A相为例,方法如下:若
为第k个采样点的电流。若开关管驱动信号在(k+1)时刻的电流与k时刻的电流不同,而2个时刻下的电流采样值相同,则由式(17)解得的电流必然发生跳变,产生系统误差。若消除此系统误差,需在DA转换之前对电流解算值进行处理,以A相为例,方法如下:若
 ,则令
,则令
 ,否则不进行处理。处理后,绕组电流的解算值和真实值如图11(b)所示,由图11可知二者基本吻合,证明了系统误差处理方法的有效性。
,否则不进行处理。处理后,绕组电流的解算值和真实值如图11(b)所示,由图11可知二者基本吻合,证明了系统误差处理方法的有效性。
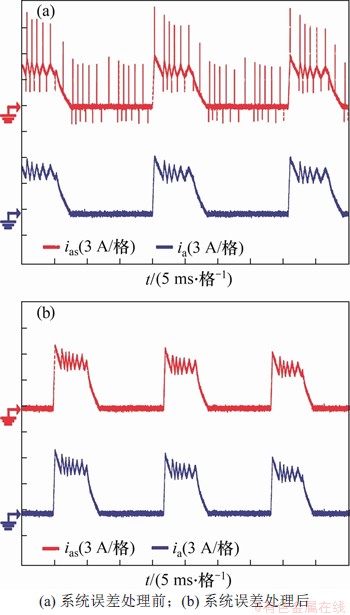
图11 绕组电流解算值和真实值对比结果
Fig. 11 Comparison of calculated value and actual value of winding current
3.3 无故障运行实验
图12所示为功率变换器在无故障状态下的相电流解算实验波形,其中,和分别为相电流解算值,为三者之和;为电流传感器 输出值;
输出值; 为与的差值绝对值。图12(a)所示为电流解算结果,证明了电流检测方案的正确性。图12(b)中,的最大值为0.21 A,远小于故障阈值2.0 A,证明了在实验系统中,解算得出的相电流不仅可用于电机的反馈控制,亦可用于所提出的功率变换器故障诊断方案中。
为与的差值绝对值。图12(a)所示为电流解算结果,证明了电流检测方案的正确性。图12(b)中,的最大值为0.21 A,远小于故障阈值2.0 A,证明了在实验系统中,解算得出的相电流不仅可用于电机的反馈控制,亦可用于所提出的功率变换器故障诊断方案中。
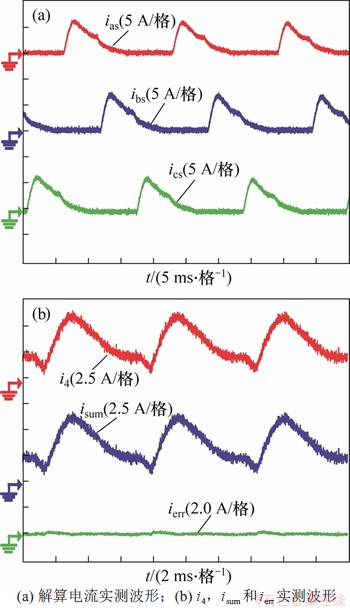
图12 正常工作状态实验波形
Fig. 12 Normal working state experiment waveforms
3.4 单管故障实验
图13所示为开关管发生开路故障前后实验波形,,和为控制系数,为开关管 的控制信号。由图13可知:在未发生故障时,与基本吻合,接近0,故障诊断程序未被触发启动。此时图13中的控制系数按各相导通顺序在0和1之间规律变化。开路后,逐渐偏离,导致逐渐增大。当越过设定的阈值2 A并持续几个采样周期后,由0跳变为2,和均未变化,
的控制信号。由图13可知:在未发生故障时,与基本吻合,接近0,故障诊断程序未被触发启动。此时图13中的控制系数按各相导通顺序在0和1之间规律变化。开路后,逐渐偏离,导致逐渐增大。当越过设定的阈值2 A并持续几个采样周期后,由0跳变为2,和均未变化, 由高电平转为恒低电平,系统指示发生开路故障。由于
由高电平转为恒低电平,系统指示发生开路故障。由于 始终为低电平,控制系数在故障后仅在1和2之间变化,实验结果表明:大于2 A阈值的触发了诊断程序启动,系统将该时刻采集到的电流传感器输出值
始终为低电平,控制系数在故障后仅在1和2之间变化,实验结果表明:大于2 A阈值的触发了诊断程序启动,系统将该时刻采集到的电流传感器输出值 输入到式(21)中,再将式(21)解出的所有可能的状态系数组合以及控制系数,和输入至取舍规则式(22)中,得出最终的功率变换器状态为(2,1,1)。最后,将解出的状态系数与该时刻的控制系数(0,1,1)输入到表2中,可判断发生开路故障,因此将保持为低电平。
输入到式(21)中,再将式(21)解出的所有可能的状态系数组合以及控制系数,和输入至取舍规则式(22)中,得出最终的功率变换器状态为(2,1,1)。最后,将解出的状态系数与该时刻的控制系数(0,1,1)输入到表2中,可判断发生开路故障,因此将保持为低电平。
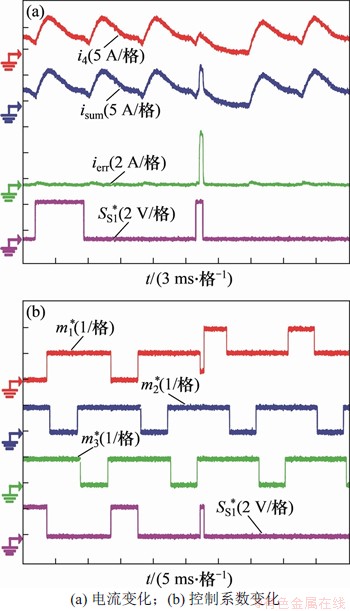
图13  开路故障实验波形
开路故障实验波形
Fig. 13 open fault experiment waveforms
图14所示为 发生短路故障后的系统诊断结果。由图14可知:在B相关断区间内,由于实际通断状态与其逻辑信号不一致,导致电流解算错误,从
发生短路故障后的系统诊断结果。由图14可知:在B相关断区间内,由于实际通断状态与其逻辑信号不一致,导致电流解算错误,从 下降沿时刻开始偏离。上升并越过2 A阈值后,故障诊断程序被触发。此时功率变换器的控制系数为(1,1,1),诊断程序输出的状态系数为(1,2,1),查表2可判断该故障为短路。由图14还可知:系统在短路后控制的逻辑信号恒为高电平,在故障后变为在0和2之间转换,指示发生短路,实验结果与理论分析一致。同时,实验结果表明:在导通时发生短路后,和在B相导通区间内仍是一致的,因此,在故障瞬间并不会上升。而在B相关断区间,为0,为1,使得上升,出现故障特征。
下降沿时刻开始偏离。上升并越过2 A阈值后,故障诊断程序被触发。此时功率变换器的控制系数为(1,1,1),诊断程序输出的状态系数为(1,2,1),查表2可判断该故障为短路。由图14还可知:系统在短路后控制的逻辑信号恒为高电平,在故障后变为在0和2之间转换,指示发生短路,实验结果与理论分析一致。同时,实验结果表明:在导通时发生短路后,和在B相导通区间内仍是一致的,因此,在故障瞬间并不会上升。而在B相关断区间,为0,为1,使得上升,出现故障特征。
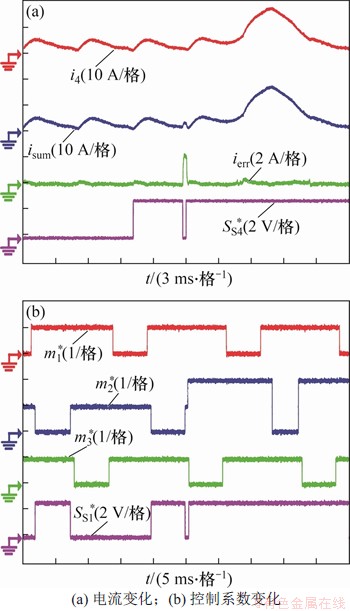
图14  短路故障实验波形
短路故障实验波形
Fig. 14 short fault experiment waveform
3.5 混合故障实验
当某开关管发生短路故障后,绕组在电感下降区内的正向旋转电动势的作用下产生过电流,此时,同相的另一开关管易被诱发短路故障。在已经短路的基础上, 也发生短路故障时的实验波形如图15所示。短路且被系统定位故障后,依然可以跟随变化,不超过触发诊断阈值且非0即2,表示在故障后恒为高电平,保证了控制系数和状态系数的一致。短路后,迅速上升且触发诊断程序启动,此时的功率变换器的控制系数为(0,2,1),诊断程序输出的状态系数为(0,0,1),由表2可判断该故障为短路,此时系统控制
也发生短路故障时的实验波形如图15所示。短路且被系统定位故障后,依然可以跟随变化,不超过触发诊断阈值且非0即2,表示在故障后恒为高电平,保证了控制系数和状态系数的一致。短路后,迅速上升且触发诊断程序启动,此时的功率变换器的控制系数为(0,2,1),诊断程序输出的状态系数为(0,0,1),由表2可判断该故障为短路,此时系统控制 输出保持为高电平。由于B相在双管短路状态下仅有ST1状态,因此始终为0。
输出保持为高电平。由于B相在双管短路状态下仅有ST1状态,因此始终为0。
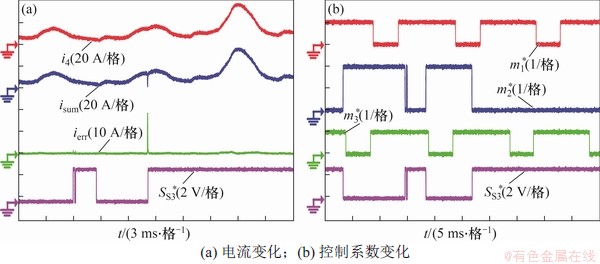
图15 和 先后短路故障实验波形
先后短路故障实验波形
Fig. 15 Experimental waveforms of and successive short-circuit faults
图16所示为在发生短路故障之后,和同时发生开路故障前后的实验波形。短路后,图16(b)中控制系数非0即2,图16中可随变化,表示此时的恒为高电平,系统已准确诊断出的短路故障。当和在短路之后同时发生开路故障,出现尖峰,使得迅速上升,越过2 A的预设阈值,几个电流采样周期后,继续跟随,迅速下降并接近于0,同时逻辑信号和输出恒为低电平,表示系统诊断开关管和同时发生开路故障。实验结果表明,当超过2 A时,故障诊断程序被触发,程序将故障时刻的电流传感器采样值代入式(21)中,反解得到所有可能的状态,再利用式(22)得到真实的状态解(1,2,1),再将状态解和故障时刻的控制系数(0,2,1)输入到表2中得到和均开路的诊断结果,同时控制和恒为低电平,以保证电流解算的正确性,实验结果和理论分析一致。
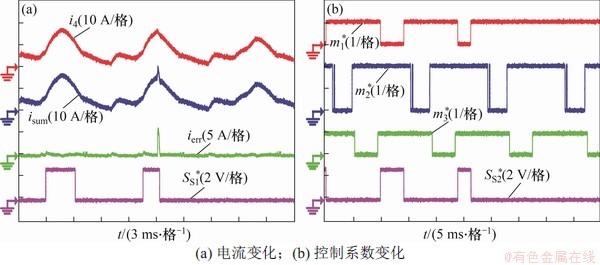
图16 ,和 混合故障实验波形
混合故障实验波形
Fig. 16 Mixed fault experiment waveforms of , and
4 结论
1) 实验的随机误差主要由电流传感器和编码器的测量误差产生,但其未影响诊断准确性。
2) 在对电流解算过程中的系统误差进行处理后,电流解算值和真实值基本相同,可用于SRM调速系统的反馈控制。
2) 通过对比状态反解得到的状态系数和故障时刻的控制系数,方案对不同类型的单管故障、多管混合故障均具有诊断能力,诊断范围宽。
3) 通过观测各开关管的逻辑信号即可直接判断故障类型,故障特征明显。
参考文献:
[1] CHEN Hao, GU J J. Implementation of the three-phase switched reluctance machine system for motors and generators[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(3): 421-432.
[2] UDDIN W, HUSAIN T, SOZER Y, et al. Design methodology of a switched reluctance machine for off-road vehicle applications[J]. IEEE Transactions on Industry Applications, 2016, 52(3): 2138-2147.
[3] GAN Chun, SUN Qingguo, WU Jianhua, et al. A universal two-sensor current detection scheme for current control of multiphase switched reluctance motor switch multiphase excitation[J]. IEEE Transactions on Power Electronics, 2019, 34(2): 1526-1539.
[4] CHANG H, LIAW C. An integrated driving/charging switched reluctance motor drive using three-phase power module[J]. IEEE Transactions on Industrial Electronics, 2011, 58(5): 1763-1775.
[5] SUN Xiadong, SHEN Yichen, WANG Shaohua, et al. Core losses analysis of a novel 16/10 segmented rotor switched reluctance BSG motor for HEVs using nonlinear lumped parameter equivalent circuit model[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(2): 747-757.
[6] SONG Shoujun, FANG Gaoliang, ZHANG Zhihui, et al. Unsaturated-inductance-based instantaneous torque online estimation of switched reluctance machine with locally linearized energy conversion loop[J]. IEEE Transactions on Industrial Electronics, 2018, 65(8): 6109-6119.
[7] CHIBA A, KIYOTA K, HOSHI N, et al. Development of a rare-earth-free SR motor with high torque density for hybrid vehicles[J]. IEEE Transactions on Energy Conversion, 2015, 30(1): 175-182.
[8] FANG Jiancheng, LI Wenzhuo, LI Haitao, et al. Online inverter fault diagnosis of buck-converter BLDC motor combinations[J]. IEEE Transactions on Power Electronics, 2015, 30(5): 2674-2688.
[9] FAIZ J, OJAGHI M. Stator inductance fluctuation of induction motor as an eccentricity fault index[J]. IEEE Transactions on Magnetics, 2011, 47(6): 1775-1785.
[10] GAN Chun, CHEN Yu, QU Ronghai, et al. An overview of fault-diagnosis and fault-tolerance techniques for switched reluctance machine systems[J]. IEEE Access, 2019, 7: 174822-174838.
[11] GAN Chun, SUN Qingguo,WU Jianhua, et al. MMC-based SRM drives with decentralized battery energy storage system for hybrid electric vehicles[J]. IEEE Transactions on Power Electronics, 2019, 34(3): 2608-2621.
[12] CHEN Hao, LU Shengli. Fault diagnosis digital method for power transistors in power converters of switched reluctance motors[J]. IEEE Transactions on Industrial Electronics, 2013, 60(2): 749-763.
[13] 杨文浩, 苟斌, 雷渝, 等. 基于自适应滑窗的开关磁阻电机调速系统故障诊断[J]. 微特电机, 2019, 47(9): 7-13.
YANG Wenhao, GOU Bin, LEI Yu, et al. Fault diagnosis of switched reluctance motor speed control system based on adaptive sliding window[J]. Small and Special Electrical Machines, 2019, 47(9): 7-13.
[14] 甘醇, 吴建华, 杨仕友. 基于小波包能量分析的开关磁阻电机功率变换器故障诊断[J]. 中国电机工程学报, 2014, 34(9): 1415-1422.
GAN Chun, WU Jianhua, YANG Shiyou. Fault diagnosis of switched reluctance motor power converter based on wavelet packet energy analysis[J]. Proceedings of the CSEE, 2014, 34 (9): 1415-1422.
[15] RO H, KIM D, JEONG H, et al. Tolerant control for power transistor faults in switched reluctance motor drives[J]. IEEE Transactions on Industry Applications, 2015, 51(4): 3187-3197.
[16] MARQUES J F, ESTIMA I O, GAMEIRO N S, et al. A new diagnostic technique for real-time diagnosis of power converter faults in switched reluctance motor drives[J]. IEEE Transactions on Industry Applications, 2014, 50(3): 1854-1860.
[17] YANG Wenhao, GOU Bin, LEI Yu, et al. Short switch fault diagnosis method for power converter using a model-based approach in switched reluctance motor drives[J]. The Journal of Engineering, 2019, 2019(16): 2137-2141.
[18] XU Shuai, CHEN Hao, DONG Feng, et al. Online sensorless fault diagnosis and remediation strategies selection of transistors for power converter in SRD[J]. IET Electric Power Applications, 2019, 13(10): 1553-1564.
[19] CHEN Hao, HAN Guoqiang, SHI Xianqiang, et al. Phase current digital analysis of power converter for freewheeling diode fault diagnosis on switched reluctance motor drive[J]. IEEE Transactions on Industrial Electronics, 2019, 66(8): 6613-6624.
[20] CHEN Hao, HAN Guoqiang, GUAN Guorui. Generalised fault diagnostic method for power transistors in asymmetric half-bridge power converter of SRM drive[J]. IET Electric Power Applications, 2019, 13(2): 168-180.
[21] PENG Wei, GYSELINCK J J C, AHN J, et al. Minimal current sensing strategy for switched reluctance machine control with enhanced fault-detection capability[J]. IEEE Transactions on Industry Applications, 2019, 55(4): 3725-3735.
[22] HAN Guoqiang, CHEN Hao, SHI Xianqiang, et al. Phase current reconstruction strategy for switched reluctance machines with fault-tolerant capability[J]. IET Electric Power Applications, 2017, 11(3): 399-411.
(编辑 杨幼平)
收稿日期: 2020 -05 -25; 修回日期: 2020 -08 -24
基金项目(Foundation item):国家自然科学基金资助项目(61603411) (Project(61603411) supported by the National Natural Science Foundation of China)
通信作者:刘勇智,博士,教授,从事航空电气系统研究;E-mail: Liuyz_kj@163.com
引用格式: 刘勇智, 王熔基, 管振水. 基于状态反解的开关磁阻电机功率变换器故障诊断[J]. 中南大学学报(自然科学版), 2021, 52(4): 1185-1196.
Citation: LIU Yongzhi, NIE Kai, WANG Rongji, et al. Fault diagnostic for power transistors in power converter of switched reluctance motor drive based on state inverse solution[J]. Journal of Central South University(Science and Technology), 2021, 52(4): 1185-1196.

