DOI: 10.11817/j.issn.1672-7207.2016.05.013
��������任��������첽���ת����ǰ����������
�������ΰ�������������ʣ�������
(���մ�ѧ ������Ϣ����ѧԺ������ ��212013)
ժҪ��Ϊ���������첽����ڸ�������ʱ�ɻ�е��ƽ�������ת������ƫ�����⣬���һ�ֻ�������任��ת����ǰ����������ϵͳ����ϵͳ������ת����任��λ���ź�����ȡ�����źţ�����ԭ�еľ�������������ϵͳ�У�����1��ǰ����������ʹ�ÿ��������������������ź���ͬ�ڳɷֿ����������Ӵ�������������ϵͳ�����źŵĸնȣ��Ӷ�ǿ��ת��Χ���伸����������ת��ʵ��ת�ӵ������ơ��о������������ת��Ϊ6 000 r/minʱ�����油����ת����-��ֵԼΪ11 ��m�������ò������Ʋ����ܺܺõ���������ת�ӵ������ת����ת���ȡ���ǰ���������Ʒ����ܹ���ת�Ӿ���λ�Ʒ�-��ֵ��Χ������40 ��m���ڣ���֤�����᷽������ȷ������Ч�ԡ�
�ؼ��ʣ�������첽�����ת������ƫ�ģ������ƣ�ǰ����������
��ͼ����ţ�TM346 ���ױ�־�룺A ���±�ţ�1672-7207(2016)05-1543-08
Rotor vibration feedforward compensation control in bearingless induction motor based on coordinate transformation
YANG Zebin, DONG Dawei, SUN Xiaodong, JIN Ren, YU Peiyun
(School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China)
Abstract: To solve the rotor mass eccentric problem caused by mechanical imbalance for the bearingless induction motor at high speed, a rotor vibration feedforward compensation control system was designed based on coordinate transformation. The vibration signal was extracted from the displacement signal by rotating coordinate transformation and was added to the original radial suspension force control system. Then, a feedforward compensator was formed, which increased the given period radial suspension force component control signal and amplified the stiffness of the vibration signal of the radial suspension force control system. The rotor vibration was suppressed by forcing the rotor rotating around its geometric center axis. The results show that the compensated rotor vibration peak to peak value in simulation is about 11 ��m at the speed of 6 000 r/min. The vibration of suspension rotor can be effectively restrained and the precision of rotor is improved in this control strategy. The presented feedforward compensation control method can make the peak to peak value of rotor radial displacement range within 40 ��m. The correctness and effectiveness of the proposed method are verified.
Key words: bearingless induction motor; rotor eccentric mass; vibration suppression; feedforward compensation control
������첽�������нṹ����϶���ȡ��ݲ�����ת�ص͡����ŷ�Χ�����ɲ�����ͨ����ת�ӵ��ص㣬�ڸ��١����������ػ��������ַ��ӱá����ıá��������ݡ����ִ���װ�õ��������DZ�ڵ�Ӧ�ü�ֵ[1-4]��Ȼ������ת�ӵ�Ƭ�����ֲ��������Լ��ӹ�װ�侫�ȵȻ�е��ƽ��ԭ�������������첽���ת������ƫ�����⣬��ʱ����ת���ϲ���һ����ת��ͬƵ�ļ��������������ּ�������ת�ٵ�ƽ��������[5]����ת�ٴﵽһ���̶�ʱ��������ʹת�ӷ����������������һ������������϶���ݵ������ϣ�������������ʹϵͳ�����ܺͰ�ȫ�����ܵ�Ӱ�졣��ˣ��о�����ת��������ƽ�����⣬������Ҫ�����ۼ�ֵ����ʵ���塣������ѧ�����������������ƽ�ⲹ������[6-10]����Щ�������Է�Ϊ2�ࣺ��ƽ��λ�Ʋ����Ͳ�ƽ����������ǰ������һ����ת���¼�Сת�ӵĸնȺ����ᣬʹת��Χ�����������ת���������ǼӴ�����ת�ӵĸնȺ����ᣬʹת��Χ���伸��������ת��������е������ת�ӵ�������Ҳȡ����һЩ�о��ɹ�[11-14]�������[11]���ǵ�ת��λ��ƫ�����⣬���þ����������ջ����ƣ���С����λ�Ƶķ�-��ֵ�������������첽�������ת���ȶ������ľ�����̬���ܣ����˷���Ҫ��þ�ȷ�ľ�������������ģ�ͣ��쟺���[12]���ڲ�ƽ���������������������˷�������������������������ű�Ƭ�����ȡ���˽Ϻõ�������Ч��������Ҫ���д�������ѧ���㣻��ٻӰ��[13]����˻�����С����(least mean square��LMS)�㷨������Ӧ�����˲������ܹ�ʹ����п��ش������ڲ�ͬת����������Ч����ת�ӵ�ͬƵ��λ�ƣ�����ת�ӵ�ƫ���������ת���������ȣ����Ǿ�������Ӧ�˲����ȶ��Ժ������ٶȵIJ�����������ȷ�������ε�[14]����ǰ��������˲�ƽ�ⲹ������ϵͳ�������������ͬ�����ת�ӽ������������ƣ�������ת���ķ�ֵ�������ת�ӵ���ת���ȣ�ȡ��������Ч���������о����������е����½��еġ������������������첽���ת������ƫ�������⣬���һ�ֻ�������任�IJ�ƽ��ǰ��������������ת�ӽ����˲������ơ�������任��ǰ�����������ϣ���������任��ȡ���źţ�����ǰ��������������ƽ�⼤��������������첽���ת�غ;����������������ϵͳ�Ļ����ϣ�����Matlab/Simulink�����乹���˷������ϵͳ���ڵ��ٺ���2��״̬�½��з����о���Ϊ��һ����֤������Ʋ��Ե���Ч�Ժ���ȷ�ԣ���������첽������ֿ���ϵͳƽ̨�Ͻ��������о���
1 ������첽�������ԭ����ת�Ӷ���ѧģ��
1.1 ������첽����Ĺ���ԭ��
����ͨ���첽����Ķ�����������Ƕ��һ�������������飬����ת������;������������鼫�����ֱ�ΪP1��P2����Ӧ�ĵ��Ƶ�ʷֱ�Ϊw1��w2����2�����鼫��������P2=P1��1������w1=w2ʱ������б��ܲ����ɿصľ���������[2]��
ͼ1��ʾΪ������첽���(P1=1��P2=2)���ֱ���ת������;���������������ͨ�����I1��I2����ֱ������ͨy1��y2����ʱ������϶�ϲ�y1��y2ͬ����˴�����϶����������϶�²�y1��y2������϶���ܼ�С�������������y������ľ���������Fy�����ھ���������������ͨ�뷴�����ʱ���������y������ľ�����������ͬ����������x�᷽��ľ����������������ͨ���ھ���������������ͨ����I2��ֱ�ĵ�����á�����ͨ�첽������л���һ����������첽�����ת��Ҳ�ǻ����������������ġ�
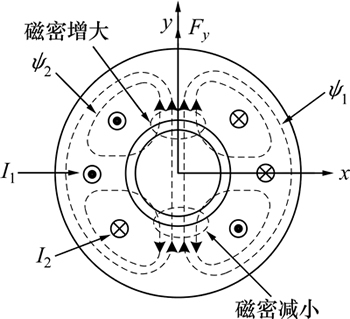
ͼ1 ��������������ԭ��ͼ
Fig. 1 Generation principle of radial levitation force
1.2 ����ת�Ӷ���ѧģ��
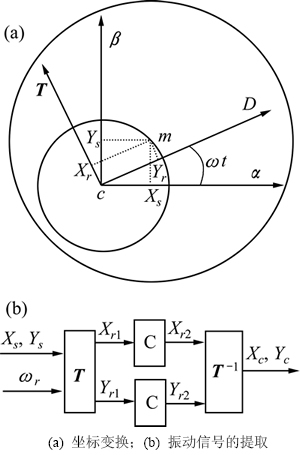
��ת�ӽ�������֮ǰ�������ת�ӵ��˶��켣���з���[8-9]����ת���Խ��ٶ� ������תʱ����ת�Ӵ�������ƫ�ģ���ᵼ�¹�����c�ͼ���������m���غϣ�ͼ2��ʾΪ������첽�������ת��ƫ������ʾ��ͼ����xOy����ϵ�£�ת�����ĵ�������Ա�ʾΪ
������תʱ����ת�Ӵ�������ƫ�ģ���ᵼ�¹�����c�ͼ���������m���غϣ�ͼ2��ʾΪ������첽�������ת��ƫ������ʾ��ͼ����xOy����ϵ�£�ת�����ĵ�������Ա�ʾΪ
 (1)
(1)
ʽ�У� Ϊת�ӹ���������ڼ����������ƫ�ľࣻΪת�ӽ��ٶȣ�tΪʱ�䣻
Ϊת�ӹ���������ڼ����������ƫ�ľࣻΪת�ӽ��ٶȣ�tΪʱ�䣻 Ϊ��ʼ��ǡ�
Ϊ��ʼ��ǡ�
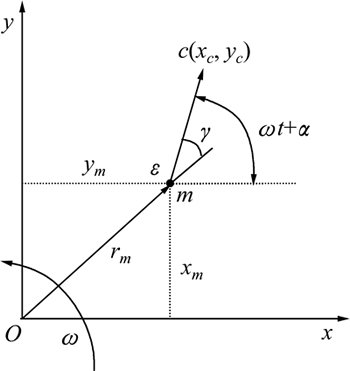
ͼ2 ����ת��ƫ������ʾ��ͼ
Fig. 2 Suspended rotor eccentricity coordinate
Ϊ�˷�����������Ի���ЧӦ����ţ���˶����ɿɽ���ת�ӵ��˶����̣�
 (2)
(2)
ʽ�У�MΪת��������xm��ymΪת�Ӽ������ĵ��˶����ꣻcx��cyΪ��ϲ�����kx��kyΪ�ն�ϵ������ʽ�ұ�Ϊ��̬�����
��ת����������ƫ��ʱ��ʽ(2)�е��ұ�Ҫ�������������ʱʽ(2)��Ϊ
 (3)
(3)
��ʽ(3)�������ɵõ�ת���ȶ�����ʱ����̬��Ӧ��
 (4)
(4)
ʽ�У�
 ��
��
 ��
��
 ��
��
��ʽ(4)���Կ�������ת������ƫ�IJ����������������£�ת�Ӽ������ĵ��˶��켣Ϊ��Բ��������ת����x��y����ĸն����ʱ��ת�ӵ��˶��켣ΪԲ����ת��Χ���伸������תʱ��λ�ƴ��������õ���ƫ���ź�Ϊ�㣬����ת��������ƽ�����ʱ��ת������������������ƫ�뼸�������ᣬλ�ƴ��������õ���λ���źžͰ�����ת�����źš���������źŵķ�ֵ��ת�ٵ�ƽ�������ȹ�ϵ��������ڸ��ٻ�������ʱ������һ�����������������ϣ�������������Ӱ�����ת��ϵͳ�����ܺͰ�ȫ���С����ж�ת��������ƽ����в������Ƶ�ԭ�����Ǹ���λ���źŸ�ת��ʩ��1���벻ƽ�����෴�IJ�������ǿ��ת��Χ�Ƽ�����������ת���Ӷ�ʵ��ת�ӵ������ơ�
2 ��������任��ǰ�����������
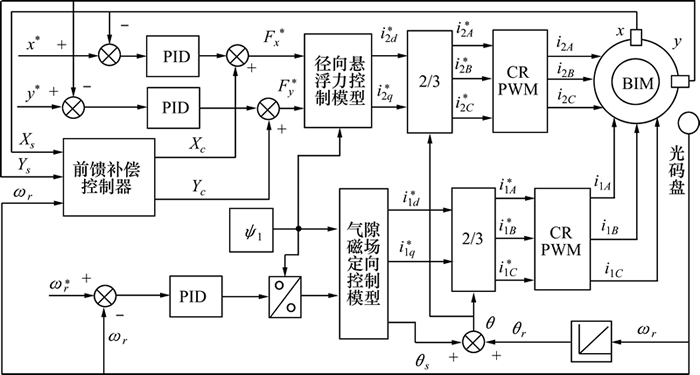
��������Ƶ�����������첽���ת����ǰ����������������϶�ų�����������[11, 15]�Ļ����Ͻ��еġ�ͨ����ת���˶��켣�ķ�����֪���ɴ�������õ�λ���ź��в���������ת��ͬƵ�����źţ���������һЩ�����źš�������IJ������Ʒ������ǽ����źŴ�λ���ź��������������ԭ�еľ�������������ϵͳ֮�ϣ�����1��ǰ����������ʹ��������첽����������ĸ�������ź�Fx*��Fy*��ͬ�ڳɷֵĿ��������Ӷ����������ϵͳ�����źŵĸնȣ��Դﵽǿ��ת��Χ�Ƽ�����������ת��Ŀ�ġ���ƽ�ⲹ������ϵͳ��ͼ��ͼ3��ʾ��
2.1 ����任�����źŵ���ȡ
ʵ��ת����ǰ���������Ƶ�ǰ�����Ҫ��λ���ź�����ȡ����ת��ͬƵ�����źţ����IJ�����ת����任��ʵ�����źŵ���ȡ������������õļ�������λ���ź�Xs��Ys���д�ֱ�����굽��ת����ı任����ʱλ���ź�����ת��ͬƵ�����źžͱ�
�任Ϊֱ����������ת�ٲ�ͬƵ�ĸ����źž�����ת�任���Ϊ��Ƶ�źţ�����֮��Ϊ Xr1��Yr1��
 (5)
(5)
�ٽ������ź�ͨ����ͨ�˲������õ�����ź� Xr2��Yr2��ֻ����ֱ�����������ֱ�������������귴�任����ʵ�������źŵ���ȡ��
ͼ3 ������첽���ת�Ӳ�ƽ�ⲹ������ϵͳ��ͼ
Fig. 3 Block diagram of rotor unbalance compensation control system for bearingless induction motor
��ʱ�����ź�Ҳ���Dz����ź� Xc��Yc�����ź�����Fzx��FzyͬƵͬ��λ����������ͨ�����ڲ����������еı���ϵ��k���ı䲹���źŵķ�ֵ���Ӷ�ʵ�ֶ�������ƽ��IJ���������������ͼ4��ʾ��ͼ4�У�TΪ��ת����任����T-1Ϊ���귴�任����C������ͨ�˲�����
 (6)
(6)
2.2 �������ļ���
�����������Ĵ���ʹת����תʱƫ���伸�������ᣬ�ŵ������IJ��������Թ�������ϵͳʱ���뿼�������������á�����ֻ������ת�ӹ������뼸��������غ�����ľ���ƽ�⣬��������������뼸����������һ���Ƕ�����Ķ�̬��ƽ�⡣����ƫ�ľ�Ϊ�����ҵ����x��y�����λ�Ƹն���ͬ��������ģ����Ը���ת��ת�ٵı仯��ʵʱ�ؼ����ת�ӽ��ٶȦأ���Ϊ�����������������źţ��Ӷ�ʹ���������ļ����������Ӧ�ԡ���ת����ת�٦���תʱ����������ת���ϵ�������Ϊ
 (7)
(7)
ͼ4 ����任�����źŵ���ȡ
Fig. 4 Coordinate transformation and vibration signal extraction
��ʽ(7)���Կ�������������ת�ٵ�ƽ�������ȣ���ʹ��ƫ�ľ��С������£���ת������ʱ��������ҲѸ�ٵ�������Ҳ�Ӳ��淴ӳ��ת��ƫ�IJ����ı�Ҫ�ԡ�
3 �����ʵ���о�
3.1 ���������
Ϊ��֤���������������任��������첽���ǰ���������Ʒ������ڿ��ٷ�Χ�ڽ��������ƣ����� Matlab/Simulink�����乹���˿���ϵͳ�ķ���ģ�ͣ��ڵ��ٺ���2��״̬�½����˷����о���ǰ����������������ϵͳ��ͼ5��ʾ����Ҫ�����������ļ�������źŵ���ȡ2�����֡�
������첽����IJ���Ϊ��ת������M=2.85 kg��ת������J=7.69 g��m2��ת�����飺������ΪP1=1�����ӵ���Ϊ2.01 ��������ת�ӻ���Ϊ0.158 56 H������©��Ϊ4.54��10-3 H���������飺������P2=2�����ӵ���Ϊ1.03 ����ת�ӵ���Ϊ0.075 ��������ת�ӻ���Ϊ9.32��10-3 H������©��Ϊ2.67��10-3 H��ת��©��Ϊ5.42��10-3 H��ƫ�ľ�=0.3 mm����������ͼ6~8��ʾ��
ͼ6��ʾΪ�ڵ���(1 500 r/min)״̬��������첽���ת���ķ�������ͼ6(a)��6(b)��ʾ�ֱ�Ϊ����������ת���ȶ�����ʱ��������m��x��y�����λ�Ʋ���ͼ�����ת�����ȶ����������-��ֵԼΪ30 ��m��ͼ6(c)��6(d)��ʾ�ֱ�Ϊ�в���������ʱת���ȶ�����ʱ��������m��x��y�����λ�Ʋ��Σ�����-��ֵԼΪ10 ��m����ͼ6���Կ���������ǰ��������ת�ӵ���ֵ��С��֤���˱�������ƿ���������Ч�ԡ�
ͼ7��ͼ8��ʾΪ�ڸ���(6 000 r/min)״̬�µķ�������ͼ7(a)��7(b)��ʾ�ֱ�Ϊ����������ת���ȶ�����ʱ��������m��x��y����ľ���λ�Ʋ��Σ����ת�����ȶ����������-��ֵԼΪ44 ��m��ͼ7(c)��7(d)��ʾ�ֱ�Ϊ�в���������ʱת���ȶ�����ʱ��������m��x��y�����λ�Ʋ��Σ�����-��ֵԼΪ11 ��m����ͼ7���Ե�֪����������첽��������ڸ���״̬ʱ��������Ƶ�ǰ���������ܹ���Ч������������ת��������ƽ����������ʹת�ӵ���ת���ȵõ��������ߡ�
ͼ8(a)��8(b)��ʾ�ֱ�Ϊ��ǰ������������ǰ��������ʱת�ӵ�x��yλ�ƹ켣�����ڼ���������첽�����x��y�����λ�Ƹն���ͬ����ͼ8���Կ�����ת�����ȶ��������伸�������˶��켣ΪԲ��ͬʱҲ������ؿ���������Ʋ��Ե���Ч�ԡ��Ա�ͼ6��ͼ7�ķ����������Է��֣�������첽����ڵ��ٺ���״̬��ת�ӵ�������ȡ�������������Ч��������ʱ��-��ֵԼΪδ�Ӳ�������ǰ��1/3������״̬��ת�ӵ���-��ֵԼΪδ�Ӳ�������ǰ��1/4�������������Ʒ������ڿ��ٷ�Χ�ڽ��в������ƣ������ڸ���ʱЧ��������
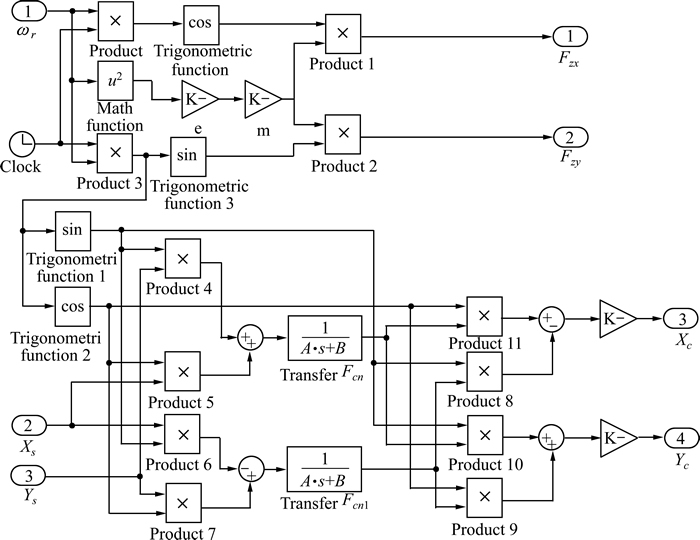
ͼ5 ǰ���������ķ���ģ��
Fig. 5 Simulation model of feedforward compensator
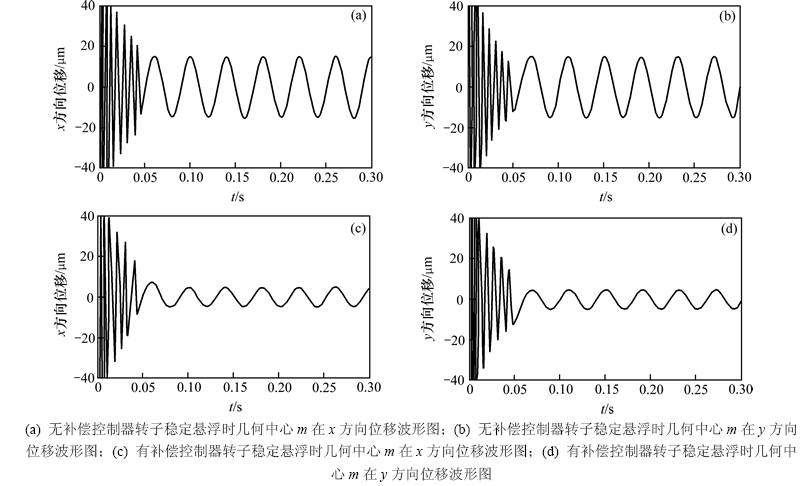
ͼ6 �����Ʒ�����(1 500 r/min)
Fig. 6 Vibration suppression simulation results at speed of 1 500 r/min
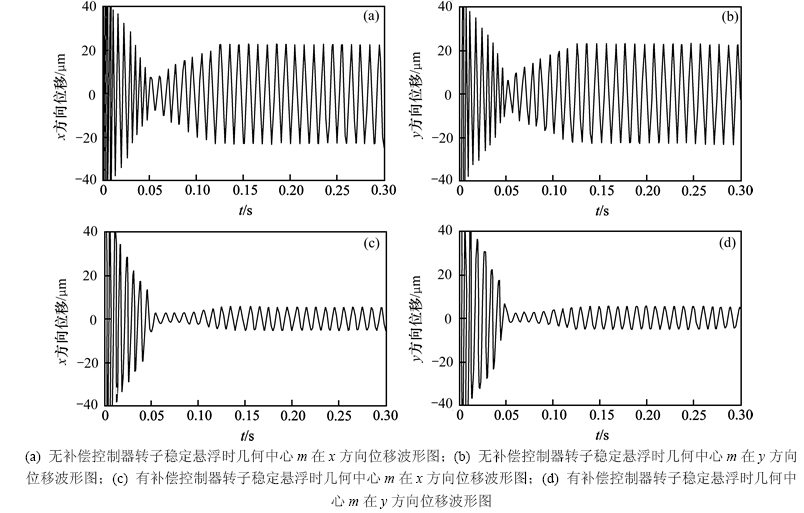
ͼ7 �����Ʒ�����(6 000 r/min)
Fig. 7 Vibration suppression simulation results at speed of 6 000 r/min
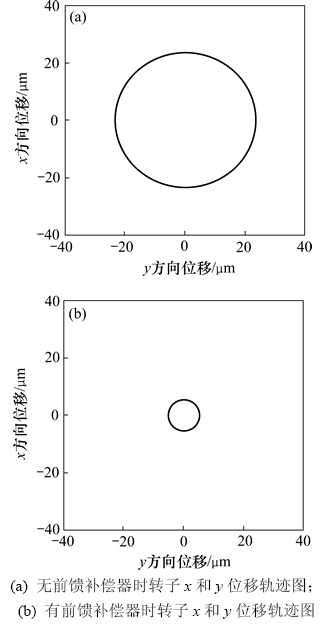
ͼ8 �ȶ�����ʱת�Ӽ������ĵ��˶��켣(6 000 r/min)
Fig. 8 Trajectories of rotor geometry center when stable suspension at speed of 6 000 r/min
3.2 ʵ�������
Ϊ�˽�һ��֤ʵ�������Ʒ�������Ч������ȷ�ԣ���1̨�����ɶ�������첽�������Ϊʵ��������TMS320F28335Ϊ���ĵ����ֿ���ʵ��ƽ̨�������᷽������ʵ����֤����������������ͬ���������ʵ���е���ĸ���ת������Ϊ6 000 r/min��ʵ��ṹ��ͼ��ͼ9��ʾ��
ͼ10(a)��ʾΪ��ǰ��������ʱx�����ϵľ���λ�ơ���ͼ10(a)���Կ�������λ�Ƶķ�-��ֵ��ΧΪ80 ��m����ΧԶС�ڵ������϶���ȣ�ʵ���˵���ȶ�������ͼ10(b)��ʾΪ��ǰ��������ʱx�����ϵľ���λ�ơ���ͼ10(b)���Կ�������λ�Ƶķ�-��ֵ��Χ��40 ��m���ڣ�����ǰ������������ֵ��С��ԭ����1/2���ң�����Ч�����ԣ�ϵͳ���ƾ�����ߣ�ȷ����������첽������ȶ�������������֤��������Ʒ�������ȷ�Ժ���Ч�ԡ�
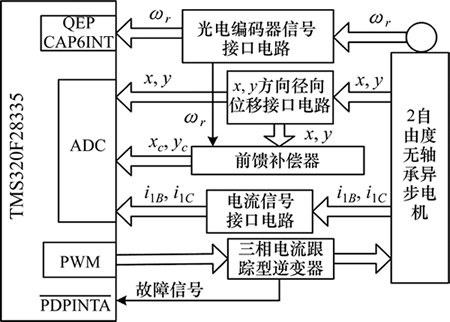
ͼ9 ʵ��ṹ��ͼ
Fig. 9 Experimental structure diagram
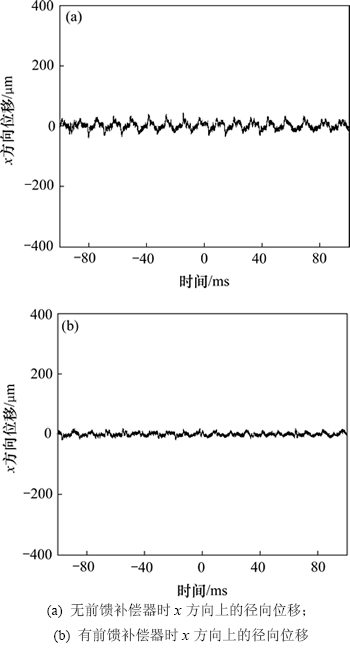
ͼ10 ת����ֵʵ����
Fig. 10 Experimental results of rotor vibration peak to peak value
4 ����
1) ���û�������任��ǰ�������㷨��������첽���ת�ӵ�������ƽ������˲������ƣ��÷����ܹ�ʵʱ�ؼ����ת�ӵ���ת�ٶȣ��Ӷ�ʹ�������ļ����������Ӧ�ԣ�ʵ���˶Ե����ת��������ƽ�����ʵʱ������
2) �ò������Ʒ�����С��ת����-��ֵ�������ת�ӵ���ת���ȣ�������֤��ǰ��������������ת�������Ƶ���Ч�ԡ�
3) �ڵ���״̬��ת�ӵ���λ��ԼΪδ�Ӳ�������ǰ��1/3������״̬��ת�ӵ���λ��ԼΪδ�Ӳ�������ǰ��1/4��6 000 r/min��ʵ���У�ת�ӵ���λ��ԼΪδ�Ӳ�������ǰ��1/2���ʱ������᷽�����ڿ��ٷ�Χ�ڽ����������ơ�
�ο����ף�
[1] Chiba A, Deido T, Fukao T, et al. An analysis of bearingless AC motors[J]. IEEE Transactions on Energy Conversion, 1994, 9(1): 61-68.
[2] Chiba A, Power D T, Rahman M A. Characteristics of a bearingless induction motor[J]. IEEE Transactions on Magnetics, 1991, 27(6): 5199-5201.
[3] SUN Xiaodong, CHEN Long, YANG Zebin. Overview of bearingless induction motors[J]. Mathematical Problems in Engineering, 2014(1): 1-10.
[4] ������, ������. ������������ϵͳ��������첽�����������ģ����[J]. �Զ���ѧ��, 2013, 39(4): 432-439.
WANG Zhengqi, LIU Xianxing. Nonlinear internal model control for bearingless induction motor based on neural network inversion[J]. Acta Automatic Sinica, 2013, 39(4): 432-439.
[5] Sinervo A, Arkkio A. Rotor radial position control and its effect on the total efficiency of a bearingless induction motor with a cage rotor[J]. IEEE Transactions on Magnetics, 2014, 50(4): 1-9.
[6] Wook J L, Seung S O, Dalho C. Rotor unbalance compensation without angular position sensor for active magnetic bearing[C]// 8th International Conference on Power Electronics-ECCE Asia. The Shilla Jeju, Korea, 2011: 2446-2449.
[7] Raoul H. Unbalance compensation using generalized notch filters in the multivariable feedback of magnetic bearings[J]. IEEE Transactions on Control Systems Technology, 1996, 4(5): 580-586.
[8] ����. �ɿ�����ת��ϵͳ[M]. ����: ��ѧ������, 2003: 185-208.
YU Lie. Controllable magnetic suspension rotor system[M]. Beijing: Science Press, 2003: 185-208.
[9] ����Ȩ, ��ά��, ������, ��. ���ڵ����������ת���Զ�ƽ�ⷽ����ʵ���о�[J]. ������, 2011, 30(1): 208-212.
HUANG Liquan, WANG Weimin, SU Yirui, et al. Rotor automatical balancing method and test based on electromagnetic self-recovery force[J]. Journal of Vibration and Shock, 2011, 30(1): 208-212.
[10] ������, ף����. ������-����ϵͳ��ƽ������������[J]. ����ѧ��, 2012, 25(6): 651-657.
QIAO Xiaoli, ZHU Changsheng. Active control for unbalanced vibration control of electric spindle-tool system[J]. Journal of Vibration Engineering, 2012, 25(6): 651-657.
[11] ����, ���濵. ��Ӧ������е������������ȷģ�ͼ��䷴������[J]. �й��������ѧ��, 2003, 23(11): 139-144.
NIAN Heng, HE Yikang. Analytical modeling and feedback control of the magnetic levitation force for an induction-type bearingless motor[J]. Proceedings of the CSEE, 2003, 23(11): 139-144.
[12] �쟺��, ������. ��������ű�Ƭ���ת�Ӳ�ƽ����������[J]. ϵͳ����ѧ��, 2010, 22(2): 453-457.
ZHU Huangqiu, HAO Xiaohong. Compensation control of rotor unbalance vibration on bearingless permanent magnet slice motors[J]. Journal of System Simulation, 2010, 22(2): 453-457.
[13] ��ٻӰ, ����Ȫ, ����. ����п��ش�����ת������ƫ�IJ�������[J]. �й��������ѧ��, 2011, 31(21): 128-134.
ZHANG Qianying, DENG Zhiquan, YANG Yan. Compensation control of rotor mass eccentric in bearingless switched reluctance motors[J]. Proceedings of the CSEE, 2011, 21(31): 128-134.
[14] ����, �쟺��. ���������ͬ�����ת��������ƽ�ⲹ������[J]. �й��������ѧ��, 2007, 27(15): 33-37.
ZHANG Tao, ZHU Huangqiu. Rotor��s mass unbalance compensation control in bearingless permanent magnet-type synchronous motors[J]. Proceedings of the CSEE, 2007, 27(15): 33-37.
[15] ������. ������첽�������ϵͳ�о�[D]. ��: ���մ�ѧ��������ѧԺ, 2010: 16-24.
WANG Haitao. Control system of bearingless induction motor[D]. Zhenjiang: Jiangsu University. School of Electrical and Information Engineering, 2010: 16-24.
(�༭ ����ƽ)
�ո����ڣ�2015-05-17�������ڣ�2015-08-14
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61104016, 51475214, 51305170)������ʡ��Ȼ��ѧ����������Ŀ(BK20141301, BK20130515, BK20150524)������ʡ�������˲Ÿ߷塱��Ŀ(2014ZBZZ-017, 2015XNYQC-003)���й���ʿ���ѧ����������Ŀ(2015T80508, 2014T70482)�����մ�ѧ���˲ſ���������Ŀ(14JDG076)�����ո�У����ѧ�ƽ��蹤����Ŀ(2014) (Projects(61104016, 51475214, 51305170) supported by the National Natural Science Foundation of China; Projects(BK20130515, BK20141301, BK20150524) supported by the Natural Science Foundation of Jiangsu Province of China; Projects(2014ZBZZ-017, 2015XNYQC-003) supported by the Six Categories Talent Peak of Jiangsu Province; Projects(2015T80508, 2014T70482) supported by China Postdoctoral Science Foundation; Project(14JDG076) supported by the Professional Research Foundation for Advanced Talents of Jiangsu University; Project(2014) supported by the Priority Academic Program Development of Jiangsu Higher Education Institutions)
ͨ�����ߣ������ʿ�������ڣ���ʿ����ʦ�����µ���װ���Զ���������������������������������ܿ����о���E-mail: zbyang@ujs.edu.cn

