基于点云模型的人体尺寸自动提取方法
赖军1,王博1,付全2,吴壮志3
(1. 总后军需装备研究所,北京,100010;
2. 首都体育学院 研究生部,北京,100191;
3. 北京航空航天大学 计算机学院,北京,100191)
摘要:基于点云数据的人体尺寸自动提取是三维人体非接触测量的难点问题,提出一种基于点云数据的人体尺寸自动提取方法。其步骤为:对人体点云去噪并建立标准测量坐标系;给出一种自动分割算法将人体分为6部分;将人体测点分为极值点、局部极限点和一般点3类,在模型分割的基础上给出每类测点的识别算法;最后给出人体测量项目的计算方法。研究结果表明:与传统方法相比,本方法具有全自动、速度快、操作便捷的特点;所提出的测点识别算法和测量项目的计算方法是有效的,在准确率上满足GB/T 23698―2009的要求。
关键词:人体测量学;模型分割;测点识别;人体尺寸
中图分类号:TP391.4 文献标志码:A 文章编号:1672-7207(2014)08-2676-08
Automatic extraction method of human body sizes based on 3D point clouds
LAI Jun1, WANG Bo1, FU Quan2, WU Zhuangzhi3
(1. Quartermaster Research Institute of the General Logistics Department of
Chinese People’s Liberation Army, Beijing 100010, China;
2. Graduate School, Capital University of Physical Education and Sports, Beijing 100191, China
3. School of Computer Science and Engineering, Beihang University, Beijing 100191, China)
Abstract: Considering that body size extraction based on point cloud data is a difficult problem for three-dimensional non-contact measurement of the human body, an automatic extraction method of human sizes was presented based on human point cloud data. The procedures were as follows. Firstly, the point cloud data were de-noisesed and a standard coordinate was built for measurement. Secondly, a method to segment the human body into six parts was proposed so that the landmarks could be recognized more efficiently and accurately. Thirdly, the recognition methods of human landmarks were introduced which were divided into three classes, i.e. the global extrema,the local extrema and the points that haven’t obvious characteristics. Finally, the human sizes were calculated based on the identified relative landmarks. The results show that the proposed method has characterization of shorter measure time and more flexible operation compared with the traditional size measurement method. Landmark recognition algorithm and body size measurement methods are efficient, and the rate of accuracy satisfies the demands of GB/T 23698―2009.
Key words: anthropometry; model segmentation; landmark recognition; body size
人体测量学是人机工程一个十分重要的研究领域,它通过测量人体各部位的尺寸来确定个体之间和群体之间在人体尺寸上的差异,以研究人的形态特征,从而为服装设计、体育运动技术诊断与分析、人机环境系统工程设计等提供人体测量数据[1],在服装、体育、国防等领域有着广泛应用。人体测量技术在近几十年的发展中,大致经历了接触式到非接触式、二维到三维的发展过程。传统手工测量主要采用软尺、测高计、测距计和滑动计等工具对人体进行接触式测量,虽然能获得人体尺寸,却不能满足快速、准确和批量测量的需要。非接触自动测量是现代化人体测量技术的发展趋势,它以现代光学为基础,结合图像处理和计算机视觉等技术,准确、高效、客观地获取人体参数数据。非接触测量又分为基于图像的二维非接触测量[2-3]和基于激光扫描或结构光投影的三维非接触测量2类,前者典型的产品有加拿大的Boss-21系统,后者则有德国HumanSolution公司开发的Vitus三维人体扫描仪。从点云模型中提取人体尺寸的难点在于如何鲁棒、准确地提供识别人体测点。国内外学者提出了多种在点云模型提取测点的方法,目前主要有模板网格变形方法[4-7]、判别函数拟合法[4-7]和几何形状分析法[4-7]这3类方法。模板网格变形方法是计算机图形学中一种通用的处理方法,Blanz等[4]进行了基于模板网格处理方面的开创性工作,主要用于人脸建模。受Blanz等[4]的启发,Allen等[5]将模板网格模型变形配准的方法用于人体点云模型,其变形过程依赖于人体标志点,这些标志点在人体数据扫描之前手工标定。其变形配准方法采用的是能量优化的方法,需要迭代求解,收敛速度慢。Anguelov等[6]提出了一种不需要提前指定标记点的方法来进行变形配准,采用马尔科夫网络的方法首先得到目标点云模型和模板网格模型相对应的200多个点,然后利用这些点将模板模型变形到目标点云模型上。但是,Anguelov等[6]提出的对应点计算算法仍然需要初始化4~10个标记点,需要人工标定,并且难以保证对应结果的准确性。Azouz等[7]改进了Anguelov等[6]的算法,基于一组标记了测点的人体模型,结合机器学习方法和概率图模型来进行测点识别。判别函数拟合法通过为每个测点建立一个具体的判别函数来识别测点,由Dekker等[8]首先提出,Leong等[9]把人体特征用逻辑数学描述出来,利用图像处理和计算几何技术来识别人体点云中的测点。判别函数拟合法的缺点是函数拟合的过程十分复杂且耗时,而且在函数拟合过程中会导致特征丢失。几何形状分析法也是人体点云特征提取的主要方法之一。陆国栋等[10]将点云模型进行分割,采用轮廓分析法、最小周长法、灰度检测法等来提取测点和特征线并计算人体尺寸;陈国安等[11]在进行几何形状分析的基础上,运用模糊规则来自动提取测点和尺寸。上述方法的缺点是并没有从三维人体测量方法的角度来对算法进行验证。2005年ISO发布了一个关于三维人体测量方法的标准ISO 20685[12],国内也对此标准进行了修订,发布了相应的兼容标准GB/T 23698―2009[13],这2项标准对三维扫描人体测量方法和验证进行了详细规定。陈国安等[11]虽然根据标准[13]对其方法进行了验证,但样本数只有8个,并没有达到标准规定的40个以上。针对以上问题,本文作者以体育运动技术诊断与分析、服装套号[14]需求为背景,基于三维扫描仪输出的人体点云数据,研究并实现人体尺寸自动提取方法,并根据GB/T 23698―2009的要求对方法进行验证。
1 测量需求
基于人体点云模型数据,依据GB/T 16160―2008(《服装用人体测量的部位与方法》[15]),共提取人体2种姿势下的45个人体尺寸测量项目,完成三维扫描人体尺寸的测量,并通过GB/T 23698―2009[13]对方法进行验证。
1.1 测量姿势、测点和测量项目
本文采用的2种测量姿势分别称为立姿I和立姿II,如图1所示。立姿I要求被测者双脚自然张开站立,双臂张开,抬头挺胸,两眼平视前方;立姿II要求被测者双脚并拢、双臂下垂,两手紧贴裤缝,抬头挺胸,两眼平视前方。立姿I上体尺寸测量项目为40个,立姿II上的人体尺寸测量为5个。
人体测量项目是指在相应的测量姿势上,根据人体测点给出的人体水平尺寸(包括围度尺寸)、垂直尺寸或其他尺寸,例如身高、头围,腰围等。人体测点是用于表示测量位置的界点,它通常为肌肉下方的骨骼突出部位或者关节连接处[15],例如头顶点、乳头点、枕后点等。测量项目一般由1个或多个测点进行定义,例如“身高”通过立姿II进行测量,相关的测点为“头顶点”和“地面点”。测点和测量项目的定义参见GB/T 16160―2008[15]。身高和头围这2个测量参数的示意图及相关测点如图2所示。

图1 测量姿势
Fig. 1 Anthropometric postures

图2 测量项目与测点示意图
Fig. 2 Schematic diagram of measurement items and landmarks
1.2 测量基准面和标准测量坐标系
为了确切地定位测点和准确地完成测量项目,人体测量学规定统一的标准姿势和描述术语。测量基准面和标准测量坐标系如图3所示,用于人体测量的3个基准面由3个互相垂直的轴(铅垂轴、纵轴和横轴)来决定。通过铅垂轴和横轴的平面称为冠状面,它将人体分为前、后2部分;通过横轴和纵轴的平面称为水平面,它将人体分为上、下2部分;通过铅垂轴和纵轴的所有平面称为矢状面,它将人体分为左、右2部分。特别地,正中矢状面将人体分为左、右对称的2部分。
人体标准测量坐标系定义如下:以人体自然站立时的中心点为坐标原点,竖直向上方向为Y轴正向(铅垂轴),人体正前方为Z轴正向(纵轴),人体的正左方为X轴正向(横轴),XYZ坐标系符合右手定则。
1.3 扫描设备
车载扫描仪如图4所示。本文所用的人体扫描仪为项目组自主研发的车载式三维激光人体扫描仪,扫描的长×宽×高为1 200 mm×1 200 mm×2 000 mm,扫描精度为平均围度误差小于1 mm,扫描时间小于10 s。扫描仪输出为人体点云数据(point clouds),该数据已经转换到人体标准测量坐标系下,并且呈层状结构。每一层为1条扫描线,由1个或多个环状的点集组成。每一层扫描线上的点的y坐标都相等,相邻2层扫描线在y轴方向的间隔为2 mm。
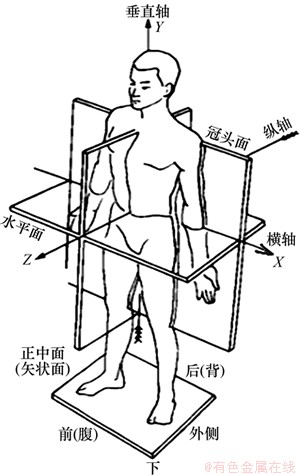
图3 测量基准面和标准测量坐标系
Fig. 3 Body planes and coordinate system of standard measurement

图4 车载扫描仪
Fig. 4 Car scanner of human body
2 尺寸提取流程与关键技术
2.1 提取流程
本文采用的尺寸提取方法流程如图5所示。首先读入人体点云数据,对其进行预处理,去除噪声点并建立标准测量坐标系;其次,将人体分割为头颈、躯干、左臂、右臂、左腿和右腿共6部分;再次,对人体每一部分上包含的测点进行自动识别。若对识别结果不满意,则可交互式移动测点;最后计算人体各测量项目的值并输出测量结果。

图5 尺寸提取流程图
Fig. 5 Flow chart of body size extraction
2.2 数据预处理
2.2.1 坐标变换
不同三维人体扫描仪都定义了自己的坐标系统,因此,测点识别前首先需要将点云数据转换到人体标准测量坐标系下。建立标准测量坐标系的具体算法如下:对三维点云数据进行主成分分析(principal component analysis,PCA)[16],则标准测量坐标系的原点为三维点云的几何中心,Y轴为PCA第一主轴,X轴为第二主轴,Z轴为PCA第三主轴,XYZ的关系满足右手坐标系的要求。
2.2.2 点云去噪
由于三维激光扫描仪在扫描人体过程中受扫描设备物理特性、扫描环境、光照以及被测者的测量方式、自身因素等影响,所获取的人体点云数据不可避免地包含噪声。如果不进行去噪,会影响测量项目的精度,故本文在进行测点识别之前先对点云进行去噪。
一般而言,扫描仪输出的三维点云数据中不存在飞点,但是,多片点云数据在配准时可能存在重叠不严实的情况。本文采用移动最小二乘法对点云数据进行高斯滤波,具体算法如下:首先对点云数据建立kd-tree;然后对每个点,在kd-tree上查找其k个最邻近点(k=20),该点的最终位置为k个最邻近点的加权平均值。如果一次滤波效果不明显,上述过程可重复多次。
2.2.3 模型分割
人体尺寸测量的关键问题是在点云数据上正确地识别测点。由于测点分布在身体的各个部分,识别前进行模型分割,可以将整体点云模型上的测点识别问题转换为局部测点识别问题。这不仅使得测点的识别更加快速和鲁棒,而且对一些无明显特征的测点进行模型分割后可更加准确地寻找该点在其所在的人体部分上的比例,从而可以借助比例关系获得较准确的初始点。
一般而言,模型分割包括手动分割和自动分割2类方法。立姿II上测量项目较少,测点的识别比较简单,不需要进行模型分割。而立姿I上的测点和测量项目较多,在识别前进行分割能够加快识别速度。本文改进了Wang等[17]给出的基于模糊逻辑的人体分割算法,通过找到立姿I上各部分的分界点(颈部分割点\腋窝点和会阴点)来完成立姿I的自动分割,将其为头颈、躯干、左臂、右臂、左腿和右腿共6部分。分界点的识别算法如下。
(1) 左/右腋窝前点和左/右腋窝后点。腋窝点及其附近的扫描线见图6。从图6可见:从头顶向下遍历层状扫描线,当扫描线上的环数首次由1变为3时,腋窝前点和腋窝后点所在的扫描线被定位。而这4点位于其所在的层状扫描线上的拐点部分,在拐点处曲率变化较大。考虑到人体体型带来的影响,本文在腋窝点所在的扫描线上取出曲率最大的6个顶点为左腋窝前点、左腋窝后点、右腋窝前点和右腋窝后点的候选点。对这6个点依照x坐标值排序,则腋窝前点和腋窝后点必定是x坐标值较大和较小的4个点;然后再根据z坐标确定出每个测点与其候选点的对应关系。
(2) 颈部分割点。颈部分割点位于人体大致7/8高度的位置[17]。本文搜索了高度在6h/7和8h/9之间的扫描线(其中h为人的身高),取这一区间内包围盒最小的扫描线的高度作为颈部分割点的高度。

图6 腋窝点及其附近的扫描线
Fig. 6 Armpits and scan lines nearby
(3) 会阴点。在立姿I下,会阴点是位于人体正中矢状面上最下端的点。在标准测量坐标系下,用x=0的平面与人体点云数据相截所得的截面环中y坐标最小的点即为会阴点。
分界点识别完成后,遍历所有的扫描线,根据扫描线高度以及环的个数,将每根扫描线中的点归属到人体对应的部分以完成立姿I的分割。
(1) 颈部分割点以上的扫描线上的点都被划分为头部。
(2) 对会阴点之下扫描线,若只包含2个环,则这2个环上的点分别属于左、右腿;若包含3个环,则中心离x=0平面最远的1个环上的点属于左臂或右臂(x<0则属于右臂,否则属于左臂);若包含4个环,则按x坐标升序排序后的4个环上的点分别属于右臂、右腿、左腿和左臂。
(3) 对会阴点以上腋窝点以下的扫描线,若包含3个环,则按x坐标升序排序后的3个环上的点分别属于右臂、躯干和左臂;若包含2个环,则中心离x=0平面较远的1个环上的点属于左臂或右臂(x<0则属于右臂,否则属于左臂)。
应用本文提出的分割算法,对立姿I进行分割后的结果如图7所示。其中,图7(a)中的圆点是用于人体分割的分界点,颈部的线为分界点所在的扫描线;图7 (b)所示为分割结果。

图7 用于分割的分界点及模型分割结果
Fig. 7 Key points and results of human body segmentation
2.4 测点识别
人体测量所需的测点分布在人体的各个部位,很难对所有测点找到统一的识别算法。根据测点在识别算法上的差异,将测点划分为3类:最值点、局部极限点和一般测点。最值点一般是在某个坐标轴上具有最大或最小值的测点;而局部极限点通常是位于给定轮廓线上的凸点、凹点或者突变点;一般测点是几何特征不明显且不属于前2类的测点。以下分别介绍这3类测点的识别方法。
2.4.1 最值点
最值点的识别算法分2步:首先根据测点定义判断出该点所在的人体部分,然后在该部分上搜索x(或y或z)坐标达到最大值或最小值时对应的点即可。例如,头顶点是人体头部上y坐标最大的点,左手中指指尖点是人体左臂上y坐标最小的点。
2.4.2 局部极限点
局部极限点又分为2类:第I类是位于基准线上的局部极限点;第II类是位于截面轮廓线上的局部极限点。前者通过定位基准线来识别,而后者采用轮廓分析的方法进行识别。
基准线是对人体围度测量项目进行测量时的基础线。本文定义的基准线如表1所示。
表1 基准线名称及其定义
Table 1 Names of base lines and their definitions
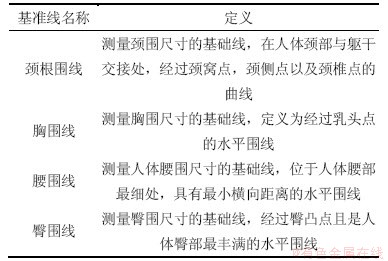
(1) 第I类局部极限点。第I类局部极限点识别的关键在于获取测点所在的基准线。定位基准线的方法如下:首先借助人体比例关系,界定基准线所在的高度区间;然后遍历区间内的所有扫描线,计算每一条扫描线上的相应指标(扫描线周长、横向宽度或者前后宽度),最后根据指标值确定对应的基准线。
在定位测点所在的基准线之后,测点的识别方法如下:首先获取测点的候选点集,即由基准线上的最前点、最后点,基准线与冠状面的交点以及基准线与正中矢状面的交点组成的集合;然后根据测点的语义特征从候选集中选择对应点。
以腰围前点和腰围后点为例予以说明。首先根据腰围线的高度所在的人体比例,获得它所在的高度区间为[0.53h,0.63h];然后,在躯干上遍历该区间内每条扫描线,计算扫描线在x方向的横向宽度w, w取最小时的扫描线即为腰围线;最后计算腰围线与正中矢状面的交点即为腰围前点和腰围后点。局部极值点和一般点的识别结果如图8所示,其中腰围前点的识别结果如图8(a)所示,黑色线为腰围线,线上的圆点即为腰围前点。

图8 局部极值点和一般点的识别结果
Fig. 8 Recognition results of local maximum and general landmarks
(2) 第II类局部极限点。第II类局部极限点通常是截面轮廓线上的凹点、凸点或者突变点。对这类测点的识别方法如下:首先计算测点所在的截面轮廓线(截面一般与矢状面、冠状面或水平面三者之一平行);然后使用一阶Sobel算子[9]分析截面轮廓线,识别出该曲线上的凹点、凸点和突变点,一般此类点就是待识别的测点。
一阶Sobel算子通常用于获得轮廓线的一阶导数,由它形成的曲线称为Sobel曲线。Sobel曲线上的过零点对应轮廓线上的凸点或凹点,由负值过渡到正值的过零点对应凸点,由正值过渡到负值的过零点对应凹点;Sobel曲线上的最大值点或最小值点对应轮廓线上的突变点。
以头部轮廓线上的鼻梁点、鼻尖点和颏下点为例:此3点位于以正中矢状面作为截面与头部相交的轮廓线上。人体头部轮廓对应的Sobel曲线如图9所示。图9中,纵轴表示轮廓线上点在Y轴方向的距离(向下为正,mm),横轴表示轮廓线上点在Z坐标值的一阶导数(单位为1的数)。从图9可见,鼻梁点是凹点,鼻尖点是凸点,颏下点是突变点。在人体模型上,鼻梁点、鼻尖点和颏下点的识别结果如图8(b)所示。

图9 人体头部轮廓对应的Sobel曲线
Fig. 9 Sobel curves corresponded to head silhouette curve
2.4.3 一般测点
一般测点通常没有明显的特征,对于这类测点的识别方法有2种:一种是直接根据测点在人体高度上的比例关系获得测点所在的扫描线,再根据测点在扫描线上的位置进行识别;另一种是根据待识别测点与它周围已识别出来的测点之间的位置关系来进行识别。
以右大腿围前点的识别为例:右大腿围扫描线位于会阴点下1 cm处的扫描线上,右大腿围前点为该扫描线的最前点(z最大点)。识别的结果如图8(c)所示,黑色线为右大腿围所在的扫描线,圆点即为识别的右大腿围前点。
2.5 人体尺寸计算
人体尺寸测量的最终目的是根据自动识别的测点获取人体各测量项目的值,从而方便后续的运动技术诊断与分析、服装套号等应用。本文将测量项的计算过程分为2步:首先获得测量项的相关测点位置信息;其次,根据不同测量项目的定义,使用不同的方法进行计算。
根据GB/T 16160―2008[15]给出测量项目的定义,本文将测量项目的计算方法划分为如下4类。
(1) 宽度、高度、厚度。已知测量项目的相关测点为P1(x1,y1,z1)和P2(x2,y2,z2),则高度 ,宽度
,宽度 ,厚度
,厚度 。
。
(2) 直线距离。已知测量项目的相关测点为 和
和 ,则定义点P1和点P2之间的距离为
,则定义点P1和点P2之间的距离为 。
。
(3) 围长。围长的计算方法通常是用过相关测点的截面与人体模型求交,得到截面与模型的一系列交点,将平面点集上的最小凸包的周长作为围长。本文采用Graham算法求解凸包[18]。
(4) 弧长。弧长的计算方法如下:用过相关测点的截面与人体模型求交,得到截面与模型的一系列交点集合S;根据弧长的定义,剔除点集S中与弧长无关的部分;对S中的点以某种准则进行排序,并将其拟合为B样条曲线,将其长度作为弧长。
2.6 计算时间效率分析
尺寸提取流程中主要步骤的算法效率分析如下。
(1) 数据预处理阶段。PCA分析的主要任务是根据点云数据构造1个3×3的矩阵,并求矩阵的特征值和特征向量,算法效率为O(n)(其中,n为点云模型中点的数目)。点云去噪时构建kd-tree的效率为O(nlgn)。
(2) 模型分割阶段。分界点识别时需要对点云进行遍历,效率为O(n)。识别分界点后,遍历所有的扫描线上的点,将其进行分类的效率为O(n)。
(3) 测点识别阶段。由于需要对点进行排序,计算效率为O(nlgn)。
(4) 尺寸计算阶段。由于涉及截面求交,需要对点云进行排序,计算效率为O(nlgn)。因此,算法总的效率为O(nlgn)。
3 实验结果与分析
根据文献[13]规定,三维扫描测量方法得到的人体尺寸测量值,应该与传统手工测量值彼此能够互相替代,这样才不会影响以这些数据为基础的其他标准的有效性。因此,本文采用传统手工测量值作为准确值对本文的方法进行验证。验证时,采用的样本数为40(文献[13]建议测试样本量至少为40),所有样本都为男性;选取对服装有代表性的身高、胸围、腰围、臀围、颈围和肩宽共6个测量项目进行验证。
表2所示为其中10个样本的自动和手工测量结果,其中“最大误差”和“平均误差”是根据40个样本统计得到的,最后1行给出了由文献[13]规定的测量项目的平均误差最大值。每个测量项目有2列数据,其中“自动”列指用本文方法自动提取的尺寸,“手工”列指作为准确值的手工测量值。从表2可知:6个测量项目的平均误差都远小于文献[13]中规定的平均误差最大值。例如40个样本的“身高”最大误差为1.8 mm,平均误差为0.5 mm,远小于文献[13]中规定的平均误差最大值4 mm。验证结果表明,本文给出的测点识别算法是有效的,根据测点计算计算出来的人体尺寸满足文献[13]的要求。
表2 6个测量项目的统计结果(样本数为40个)
Table 2 Statistical results of six body size measurement items mm

4 结论
(1) 基于人体测点识别和尺寸自动提取一直是三维人体非接触测量的难点问题,提出一种基于三维点云数据的人体尺寸自动提取方法,并根据GB/T 23698―2009对其进行验证。
(2) 本文提出的测点识别和尺寸计算方法是有效的,在准确率上满足GB/T 23698―2009的要求,为后续的体育运动技术诊断与分析、服装设计和套号等打下了良好基础。
(3) 尽管本文给出的测点识别算法是有效的,但基于模板变形的特征识别方法已经引起越来越多的学者的关注,下一步工作可将模板变形方法应用于人体测点识别。
参考文献:
[1] 席焕久, 陈昭. 人体测量方法[M]. 2版. 北京: 科学出版社, 2010: 1-20.
XI Huanjiu, CHEN Zhao. Anthropometric methods[M]. 2nd ed. Beijing: Science Press, 2010: 1-20.
[2] 吴壮志, 廖爽爽, 聂磊, 等. 基于图像的人体参数测量系统的设计与实现[J]. 湖南大学学报(自然科学版), 2010, 37(9): 88-92.
WU Zhuangzhi, LIAO Shuangshuang, NIE Lei, et al. Design and implementation of the human size measurement system based on images[J]. Journal of Hunan University(Nature Sciences), 2010, 37(9): 88-92.
[3] Lin Y L, Wang M J. Automated body feature extraction from 2D images[J]. Expert Systems with Applications, 2011, 38(3): 2585-2591.
[4] Blanz V, Vetter T. A morphable model for the synthesis of 3d faces[C]//Proceedings of the 26th Annual Conference on Computer Graphics and Interactive Techniques.New York: ACM Press, 1999: 187-194.
[5] Allen B, Curless P, PopoviC Z. The space of human body shapes:reconstruction and paramet erization from range scans[C]//Computer Graphics Proceedings, Annual Conference Series, ACM SIGGRAPH. New York: ACM Press, 2003: 587-594.
[6] Anguelov D, Srinivasan P, Koller P, et al. Scape: shape completion and animation of people[C]//Computer Graphics Proceedings, Annual Conference Series, ACM SIGGRAPH. New York: ACM Press, 2005: 408-416.
[7] Azouz Z B, Shu C, Mantel A. Automatic locating of anthropometric landmarks on 3D human models[C]//Third International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT 2006). Washington: IEEE Computer Society Press, 2006: 750-757.
[8] Dekker L, Douros I, Buston B F, et al. Building symbolic information for 3D human body modeling from range data[C]//Proceedings of the 2nd International Conference on 3D Digital and Modeling. Los Alamitos: IEEE Computer Society Press, 1999: 388-397.
[9] Leong I F, Fang J J, Tasi M J. Automatic body feature extraction from a markerless scanned human body[J]. Computer-Aided Design, 2007, 39: 568-582.
[10] 陆国栋, 徐鹏, 徐文鹏. 人体扫描模型的特征提取方法研究[J]. 工程设计学报, 2005, 12(4): 247-251.
LU Guodong, XU Peng, XU Wenpeng. Research on feature extraction method of scanned body model[J]. Journal of Engineering Design, 2005, 12(4): 247-251.
[11] 陈国安, 刘飞, 李丽. 采用模糊规则的人体点云特征尺寸识别与提取[J]. 计算机辅助设计与图形学学报, 2011, 23(8): 1394-1400.
CHEN Guoan, LIU Fei, LI Li. Recognition and extraction of human body’s feature dimensions using fuzzy rules[J]. Journal of Computer-Aided Design & Computer Graphics, 2011, 23(8): 1394-1400.
[12] ISO 20685, 3-D scanning methodologies for internationally compatible antoropometric databases[S].
[13] GB/T 23698―2009, 三维扫描人体测量方法的一般要求[S].
GB/T 23698―2009, General requirements for establishing anthropometric databases[S].
[14] GJB 608A―2008, 中国人民解放军军服号型[S].
GJB 608A―2008, The sizes of military of PLA[S].
[15] GB/T 16160―2008, 服装用人体测量的部位与方法[S].
GB/T 16160―2008, Location and method of anthropometric surveys for garments[S].
[16] Ju X, Werghi N, Siebert J P. Automatic segmentation of 3D human body scans[C]//Proceeding International Conference on Computer Graphics and Imagine. Las Vegas, USA, 2000: 239-244.
[17] Wang C C L, Chang T K K, Yuen M M F. From laser-scanned data to feature human models: A system based on fuzzy logic concept[J]. Computer-Aided Design, 2003, 135(3): 241-253.
[18] Andrew A M. Another efficient algorithm for convex hulls in two dimensions[J]. Information Processing Letter, 1979, 9(5): 216-219.
(编辑 陈灿华)
收稿日期:2014-03-13;修回日期:2014-05-21
基金项目:北京市教委2012年科研基地项目(PXM2012_014206_000036)
通信作者:付全(1972-),男,黑龙江尚志人,博士,副教授,从事运动心理学研究;电话:010 82099136;E-mail:fuquan@cupes.edu.cn

