“中南移动二号”多移动机器人通信系统
任孝平1,蔡自兴1,邹磊1,匡林爱1, 2
(1. 中南大学 信息科学与工程学院,湖南 长沙,410083;
2. 湘潭大学 信息工程学院,湖南 湘潭,411105)
摘 要:针对目前多移动机器人通信系统通用性较差的问题,提出一个多移动机器人通信系统设计原则。中南移动二号多移动机器人采用直接通信的方式,基于移动自组网的结构组建通信网络,并提出一个基于簇的多机器人通信协议进行机器人间的通信,在WindowsXP系统平台上予以实现。该通信系统可应用于装有Windows XP操作系统的移动机器人上,具有一定的通用性。在多移动机器人团队上对该通信系统进行实验。研究结果表明:簇结构的重构时间约1 s,团队监测机器人脱离团队的时间约1s,寻找传输路径的时间小于1 s;此外,可对该通信系统的参数进行调整,以适应不同的环境。
关键词:多移动机器人;中南移动二号;通信系统;直接通信;移动自组网
中图分类号:TP393 文献标志码:A 文章编号:1672-7207(2010)04-1442-07
Multi-mobile robots communication system for mobile robot of central south-Ⅱ
REN Xiao-ping1, CAI Zi-xing1, ZOU Lei1, KUANG Lin-ai1, 2
(1. School of Information Science and Engineering, Central South University, Changsha 410083, China;
2. College of Information and Engineering, Xiangtan University, Xiangtan 411105, China)
Abstract: In order to improve the compatibility of current communication system, a principle for the design of multi-mobile robots communication system was presented. MORCS-Ⅱ (Mobile robot of central south-Ⅱ) multi-mobile robots used explicit communication method, communication network was based on Ad Hoc network, communication protocol based on cluster was proposed and the prototype of the system was developed in the Windows XP operate system, which brought about some compatibility. The results show that the reconfiguration time of cluster structure is about 1 s, the time that one robot is away from a team can be detected in about 1 s, the time of finding transport path is about 1 s. Besides, the parameters can be modified so that the system is adequate to different environments.
Key words: multi-mobile robots; mobile robot of central south-Ⅱ; communication system; explicit communication; Ad Hoc network
随着机器人技术的发展及其任务的复杂化,单个机器人执行任务的缺点越来越明显,有些任务对于单个机器人来说是十分困难或者无法完成的[1],多机器人分布式作业已经成为一种趋势。多机器人联合执行任务时,它们需要通过信息交流来进行多机器人间的同步或协调[2]。目前,机器人间的交互方式可分为3 类[3-4]:通信交互、感知交互和环境交互。随着多移动机器人系统研究的不断深入,除了经典的CEBOT[5],ACTRESS[6],SWARM[7],GOFER[8]和ALLIANCE[9]系统,目前,涌现出新的多移动机器人系统平台,如Cougaar[10-11],CoCoA[12],MinDART[13]和CWMRP[14]等。Cougaar分布式系统可运行在小型无线设备上,通过配置大规模的具有鲁棒性的分布式应用程序,形成无线自组网[15],以完成实时的机器人控制和监视任务。CoCoA[12]是一种基于Ad Hoc网络的多机器人协作定位系统。机器人之间用RF信号灯(Radio frequency beacon)进行互相通信和定位,RF信号灯通过IEEE802.11无线网卡进行工作。CoCoA可以调整RF信号灯以减少机器人在定位时的能量损耗。MinDART[13]多机器人系统同样用一个信号灯作为通信的媒介。CWMRP[14]多机器人系统利用传感器信息构建移动通信网络,通过一个广播协议进行通信,在此基础上,进行机器人定位和控制算法的研究。目前,国内也广泛开展了多移动机器人通信系统的研究。吴涛等[16]采用基于Linux的集中控制式通信机制,各机器人之间以打包(Pack)的方式交换状态信息,同时,接收其他机器人传来的信息。吴艮霞等[17]提出的多机器人通信系统采用11 Mbit/s无线Hub及工作站适配器,构建了基于无线局域网的通信平台作为多机器人无线通讯的载体,最终完成了多机器人合作推箱子的试验。国外多机器人通信系统不仅进行了体系结构方面的研究,还做了较多的基于通信网络的实际研究工作,对各种形式的多机器人交互进行了广泛的研究。国内多机器人通信系统大部分是基于无线局域网的,对其进行的研究也较为简单。在此,本文作者在第一部分提出多移动机器人通信系统需要考虑的几个设计因素。
1 多移动机器人通信系统设计原则
目前,在计算机网络中广泛应用的物理链路、传输方式和通信协议等为多移动机器人系统的通信提供了基本的解决方案,然而,多移动机器人系统通信在实时性、可靠性等方面有特殊要求,针对适用于多移动机器人系统分布式控制结构的通信机制的研究具有重要意义。设计一个多移动机器人通信系统需要考虑的因素有多移动机器人通信方式,多移动机器人通信网络拓扑结构和多移动机器人通信协议等。
1.1 多移动机器人通信方式
通信是机器人之间进行交互和组织的基础。在通信对多机器人系统各种任务执行的影响方面,已进行了大量的研究。Balch和Arkin通过实验得出:即使是少量的通信也可以大大地提高系统性能[18]。
目前,多移动机器人主要的通信方式是直接通信,即通过某种共有的规则和方式实现特定含义信息的传递。直接通信要求发送和接收信息时能保持一致性,因此,在机器人之间就需要一种通讯协议。这种通信方式可以快速、有效地完成各机器人间信息的转移和交换,实现许多在其他通信方式下无法完成的高级协调协作策略。
“中南移动二号”多移动机器人团队的主要任务是在未知环境中进行多机器人协作地图探测,机器人之间的数据交换量较大,所以,采用直接通信方式。
1.2 多移动机器人通信拓扑结构
多移动机器人之间在直接通信时构成一个小型的通信网络。从理论上讲,多移动机器人通信就是一点对多点、多点对多点的通信。多个移动的机器人组成了一个无线局域网(WLAN,Wireless local area network) 。目前,许多国家在结合WLAN的多移动机器人系统方面取得了一定的成果,但由于多移动机器人通信系统具有体积小、功耗低、可移动性及动态组网的特点,所以,要将一般的WLAN通信系统应用到机器人上时,还有一定难度[19]。另外,传统的无线通信系统需要一定的网络设施支持,对于不确定的、复杂的或紧急的场合,无法及时、有效地布设展开[20]。目前,有较多的移动机器人通信系统以Ad Hoc方式组建的通信网络[21-22]。
1.3 多移动机器人通信协议
1.3.1 网络层路由协议
在基于Ad Hoc的多移动机器人通信网络中,机器人一方面运行相关的控制程序,另一方面作为路由器运行相关的路由协议,进行路由发现、路由维护,并对接收到的目的地非自身的信息进行转发。移动机器人之间或从机器人到操作员之间的信息传输需要通信协议来完成。这种传输不需要中心控制,且由于机器人的移动特性,路由协议需要处理动态变化的网络拓扑。多移动机器人通信网络协议的研究工作都集中于网络层。
图1所示为多机器人通信网络,MORCS-2多移动机器人以Ad Hoc方式组建通信网络。多机器人通信系统工作于网络层,通过截获底层的数据包,判断数据包的来源和分析数据包的目的地址,机器人再对其进行相应的处理,包括:接收、丢弃和重新打包转发数据包,组建分级结构,了解多机器人通信网络的拓扑状况等。图2所示为该多移动机器人通信系统的体系结构示意图。
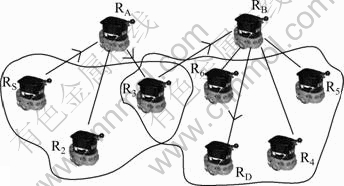
图1 多机器人通信网络
Fig.1 Multi-robot communication network
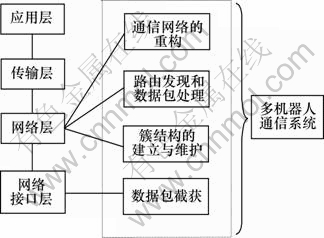
图2 通信系统体系结构
Fig.2 Structure of communication system
在通信网络中,当机器人较多时,每个机器人要维护大量的邻居机器人信息,网络利用效率和通信质量较差,故需要一个分级策略来管理众多的机器人[2],进行复杂的控制、组织和管理[23]。
1.3.2 应用层传输协议
TCP(Transmission control protocol)协议通信的特点是面向连接,具有可靠的通信质量。目前,多移动机器人实时通信系统中多用TCP协议来接收和发送机器人之间的对话信息,这样可以保证系统的稳定性和可靠性。任孝平等[24]比较了TCP传输下的3种Ad Hoc路由协议的性能。
基于TCP协议的通信是以牺牲多机器人系统实时性为代价的,往往达不到预期的效果。相反,UDP(User datagram protocol)协议通信的特点是无连接、广播式通信、通信速率高,虽然没有差错控制、超时重发、拥塞控制等可靠性保证策略,但可以保证系统的实时性。因此,在网络质量较好的情况下,UDP协议仍然是首要选择。
2 多移动机器人通信系统
目前,许多研究人员致力于自主机器人体系结构方面的研究,出现许多针对特定平台研制的系统和应用程序,但是,没有软件框架的统一标准,因此,进行了大量的重复工作[25]。根据多移动机器人通信网络的特点,多机器人通信系统应基于Ad Hoc通信系统,采用直接通信的方式。通信系统的设计应满足分布式的特点,具有一定的通用性,可快速地在机器人上安装部署,进而较快地形成多机器人通信网络,以完成机器人控制、团队协作等任务。
图3所示为本文作者设计的多移动机器人通信系统(通信系统的体系结构如图2所示),通信系统的原理见文献[2]。通信系统包括路由表的显示、机器人状态显示、邻居机器人状态以及实验数据记录4部分。每个显示区域都有相关的线程进行控制。系统显示主要的线程如表1所示。
2.1 路由表显示
界面上路由表显示是通过DispRouteThreadFunc线程来完成的。DispRouteThreadFunc线程调用PrintIpForwardTable( )函数,它的作用是显示系统的核心路由表。
多移动机器人通信系统可以动态地更新系统路由,当与其他机器人建立起通信链路进行通信时,调用UpdateSystemRoutingTable( )函数对系统路由表进行更新。由于多移动机器人通信网络的拓扑是动态变化的,每条路由都有一定的生存时间,CheckActiveRouteLifetime( )函数用于检查路由的生存时间(Lifetime)是否过期:若已经过期,则更改界面上的显示状态。
2.2 机器人状态和邻居机器人状态显示
通信系统在运行过程中,有一些提示信息需要显示,比如:协议的启动情况、本机当前的角色、所属头节点和本机邻居情况。这都需要一个线程独立地进行显示,该线程即为DispClusterStatus,它通过调用PrintStatus()函数来实现。
机器人状态显示是用于实时地显示当前机器人运行状态,包括:系统运行的一些信息,机器人当前的状态(簇头、成员或未定状态[2]),所属机器人团队以及当前邻居机器人的个数等。机器人状态数据结构如图4所示。机器人每隔一定时间t向周围机器人广播识别消息,通知周围邻居机器人自己的存在。为了记录每个机器人自身的邻居,建立一个邻居机器人表,数据结构如图5所示。
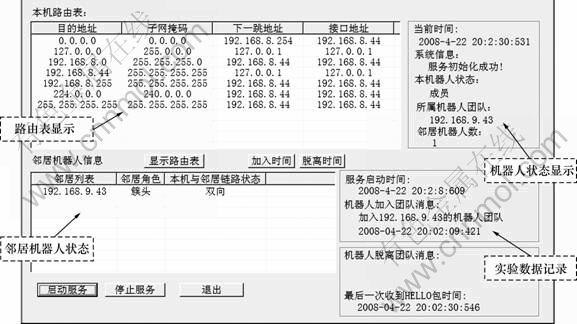
图3 多移动机器人通信系统界面
Fig.3 System interface of multi-mobile robots communication system
表1 系统显示主要线程
Table 1 Main threads for system display
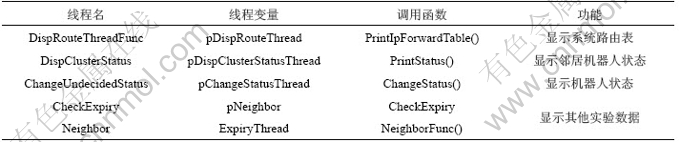

图4 机器人状态数据结构
Fig.4 Data structure of status of robot
邻居机器人表的信息存在一个过期时间项,若在过期时间t内没有收到登记机器人发送的识别包,则删除该机器人的记录项。这种机制可以保证机器人自身对周围环境有较灵敏的感知度。时间间隔设为
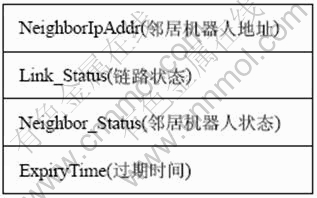
图5 邻居机器人表数据结构
Fig.5 Data structure of robot’s neighbor table
t=(HELLO_LOSS+1)×HELLO_INTERVAL,其中:HELLO_LOSS是允许丢失的HELLO信息的数目;HELLO_INTERVAL为时间常量。当1个机器人节点附近的拓扑稳定时,该机器人节点的邻居表会立刻完善到自身有双向或单向链路的所有点的信息。
由于要显示机器人状态和邻居机器人的状态,故要读取程序其他线程的变量,如系统的邻居链表等。2个线程要读取同一个变量,故需要对系统邻居链表加互斥锁pNeighborListLock,以防止引用同一个变量时发生系统出错。
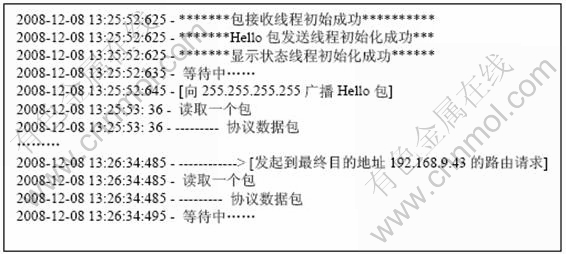
图6 通信系统日志
Fig.6 System log of communication system
2.3 实验数据记录
在进行多移动机器人通信实验时,需要记录相关的实验数据,除了采用日志记录外,在系统界面上添加了一些相关的实验信息。
日志记录是该通信系统十分重要的一部分,对程序的调试以及后期观察通信协议的性能有较大的帮助。首先,初始化1个名为CBRP.log的日志文件,然后初始化该日志的锁pLoggingLock。当需要进行记录时,对日志文件进行加锁操作,然后,调用LogMessage (char *pPrintStr)函数记录日志。
每个机器人时刻在监听有、无其他机器人发送来的消息,收到消息后对其识别并进行处理。若是非本机的消息,则进行打包并进行相应的转发。数据包的截获原理见文献[25]。当第1次收到1个机器人的识别消息时,机器人加入1个簇结构或者机器人脱离簇结构时,都有相应的记录,从而可以根据记录数据评价通信系统的性能。图6所示是截取的一段日志记录。
3 基于多移动机器人团队的实验
多移动机器人团队可用于环境监控、环境地图探测等用途。目前,中南移动二号多机器人团队已经开展多方面的研究,如地图的探测感知[26-27]、环境监 控[2]、多机器人体系结构[28]和控制方面[18]等。
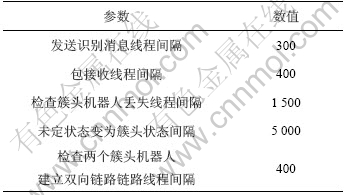
每台机器人安装Windows XP操作系统,并且配备了TP-LINK公司的TL-WN322G无线网卡。表2所示为通信系统的典型参数配置。在实验中,当修改发送识别消息线程间隔时,机器人发送识别消息的次数会增加,有利于在网络环境不好的情况下增加机器人互相识别的能力,但是,也可能给网络带来拥堵的结果,所以要根据环境进行调节。
表2 通信平台参数配置
Table 2 Parameter setting of communication platform ms
实验表明:该通信系统具有良好的实用性。簇结构的重构时间约1 s,机器人团队监测到该机器人脱离团队的时间约1 s,寻找传输路径的时间小于1 s。当然,实验环境对实验结果有较大的影响。上述实验都是在室内环境下完成的,室内环境对无线信号传输的影响较大,在实验过程中存在信号不稳定的现象。
图7所示为本机192.168.8.44与另一台机器人192.168.9.43建立1条通信链路的示意图。图8所示为中间机器人节点进行转发的实验示意图。在图8中,系统路由表显示机器人192.168.118.82到终点地址192.168.8.44是通过192.168.9.43机器人进行数据转发而完成的。实验表明:室内无障碍(15.3 m)寻找传输路径的时间约为1 s。
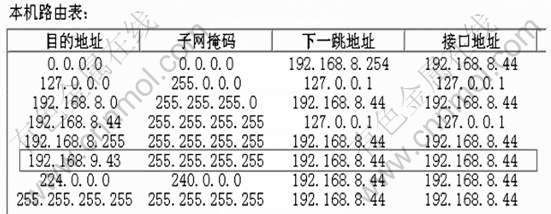
图7 2台机器人建立通信链路示意图
Fig.7 Communication link between two robots

图8 中间机器人节点进行转发的实验图
Fig.8 Transmitting data through middle robot
4 结论
(1)在多移动机器人团队中,簇结构的重构时间约1 s;机器人团队监测到该机器人脱离团队的时间约1 s;寻找传输路径的时间小于1 s。
(2)通信平台的参数可以调整,若长时间接收不到机器人发送的识别消息,可调整发送识别消息线程间隔。这种参数可调的方式给通信系统带来了一定的灵活性。
参考文献:
[1] 孙亮, 张永强, 乔世权. 多移动机器人通信技术综述[J]. 中国科技信息, 2008(5): 112-114.
SUN Liang, ZHANG Yong-qiang, QIAO Shi-quan. Summary of multi-robot communication[J]. China Science and Technology Information, 2008(5): 112-114.
[2] 任孝平, 蔡自兴, 陈爱斌. 多移动机器人通信系统研究进展[J]. 控制与决策, 2010, 25(3): 327-332
REN Xiao-ping, CAI Zi-xing, CHEN Ai-bin. Current research in multi-mobile robots communication system[J]. Control and Decision, 2010, 25(3): 327-332
[3] Tucker B. Communication, diversity and learning: Cornerstones of swarm behavior[C]//International Workshop on Swarm Robotics. Berlin: Springer, 2005, 3342: 21-30.
[4] Cao Y U, Fukunaga A S, Kahng A. Cooperative mobile robotics: antecedents and directions[J]. Autonomous Robots, 1997, 4(1): 1-23.
[5] Fukuda T, Kawauchi Y, Asama H. Analysis and evaluation of cellular robotics as a distributed intelligent system by communication amount[C]//Proceedings of IEEE International Workshop on Intelligent Robots and Systems. New York: Haworth Press, 1990: 827-834.
[6] Matsumoto A, Asama H, Ishida Y, et al. Communication in the autonomous and decentralized robot system: ACTRESS[C]// Proceedings IEEE International Workshop on Intelligent Robots and Systems. New York: Haworth Press, 1990: 835-840.
[7] Jin K, Liang P, Beni G. Stability of synchronized distributed control of discrete swarm structures[C]//Proceedings of IEEE International Conference on Robotics and Automation. New York: Haworth Press, 1994: 1033-1038.
[8] Caloud P, Choi W, Latombe J C. Indoor automation with many mobile robots[C]//Proceedings of IEEE International Workshop on Intelligent Robots and Systems. New York: Haworth Press, 1990: 67-72.
[9] Parker L E. Alliance: An architecture for fault tolerant, cooperative control of heterogeneous mobile robots[C]// Proceedings of the 1994 IEEE International Conference on Intelligent Robots and Systems. New York: Haworth Press, 1994: 776-783.
[10] Helsinger A, Thome M, Wright T. Cougaar: A scalable, distributed multi-agent architecture[C]//2004 IEEE International Conference on Systems, Man and Cybernetics. Netherlands: IEEE, 2004: 1910-1917.
[11] John Z, Richard S, Sarah S. Experience with dynamic crosscutting in cougaar[C]//Proceedings of the 2007 OTM Confederated International Conference on the Move to Meaningful Internet Systems: CoopIS, DOA, ODBASE, GADA, and IS. Berlin: Springer, 2007: 595-612.
[12] Koutsonikolas D, Das S M, Hu Y C. CoCoA: Coordinated cooperative localization for mobile multi-robot ad hoc networks[J]. Ad Hoc and Sensor Wireless Networks Journal, 2007, 3(4): 331-352.
[13] Paul E R, Amy L, Harini V, et al. Performance evaluation of a multi-robot search & retrieval system: Experiences with mindart[J]. Journal of Intelligent and Robotic Systems, 2008, 52(4): 363-387.
[14] Aveek D, John S, Vijay K. Ad hoc networks for localization and control[C]//Proceedings of the 41st IEEE Conference on Decision and Control. New York: Haworth Press, 2002: 2978-2983.
[15] 靳洋, 张毅. 基于无线Ad Hoc网络的多移动机器人系统[J]. 重庆邮电学院学报:自然科学版, 2006, 18(S1): 143-144.
JIN Yang, ZHANG Yi. Multi mobile robots system based on wireless ad hoc network[J]. Journal of Chongqing University of Posts and Telecommunications: Natural Science Edition, 2006, 18(S1): 143-144.
[16] 吴涛, 黄心汉, 黄振宇. 基于Linux的多移动机器人通信的原理与实现方法[J]. 电工技术杂志, 2003(12): 73-75.
WU Tao, HUANG Xin-han, HUANG Zhen-yu. The communication theory and realization of multi-mobile robots based on Linux[J]. Electric Engineering, 2003(12): 73-75.
[17] 吴艮霞, 李国阳, 韦巍. 基于WLAN的多机器人分布式合作系统研究[J]. 机电工程, 2006, 23(5): 32-36.
WU Gen-xia, LI Guo-yang, WEI Wei. Study on WLAN-based distributed cooperation for multi-robot system[J]. Mechanical & Electrical Engineering Magazine, 2006, 23(5): 32-36.
[18] Balch T, Arkin R C. Communication in reactive multi agent robotic systems[J]. Autonomous Robots, 1994, 1(1): 27-52.
[19] 卢薇薇, 蔡自兴, 文志强, 等. 基于DFA复合式Agent模型的设计与实现[J]. 中南大学学报: 自然科学版, 2010, 41(2): 600-608.
LU Wei-wei, CAI Zi-xing, WEN Zhi-qiang, et al. Design and implementation of complex Agent model using DFA[J]. Journal of Central South University: Science and Technology, 2010, 41(2): 600-608.
[20] 任孝平, 蔡自兴, 陈爱斌. 一种移动自组网的区域覆盖策略[J]. 计算机工程, 2008, 34(2): 159-162.
REN Xiao-ping, CAI Zi-xing, CHEN Ai-bin. A region partition tactics for ad hoc network[J]. Computer Engineering, 2008, 34(2): 159-162.
[21] Akkaya K, Janapala S. Maximizing connected coverage via controlled actor relocation in wireless sensor and actor networks[J]. Computer Networks: The International Journal of Computer and Telecommunications Networking, 2008, 52(14): 2779-2796.
[22] Ogren P, Fiorelli E, Leonard N E. Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment[J]. IEEE Transactions on Automatic Control, 2004, 49(8): 1292-1302.
[23] CHEN Ai-bin, CAI Zi-xing. Clustering in mobile ad hoc networks based on neural network[J]. Journal of Central South University of Technology, 2006, 13(6): 699-702.
[24] 任孝平, 蔡自兴, 陈爱斌. 基于TCP传输的移动自组网路由协议性能分析[J]. 计算机科学, 2008, 35(4): 74-77.
REN Xiao-ping, CAI Zi-xing, CHEN Ai-bin. Performance analysis of routing protocol for ad hoc network under TCP transmission[J]. Computer Science, 2008, 35(4): 74-77.
[25] 蔡自兴, 任孝平, 邹磊, 等. 一种簇结构下的多移动机器人通信方法[J]. 小型微型计算机系统, 2010, 3(3): 553-556.
CAI Zi-xing, REN Xiao-ping, ZOU Lei, et al. Communication method under cluster structure for multi-mobile robots[J]. Journal of Chinese Computer Systems, 2010, 3(3): 553-556.
[26] CHEN Bai-fan, CAI Zi-xing, HU De-wen. Approach of simultaneous localization and mapping based on local maps for robot[J]. Journal of Central South University of Technology, 2006, 13(6): 713-716.
[27] 李润伟, 蔡自兴, 童宇. 基于ATM的提高狭窄环境探测精度的改进方法[J]. 智能系统学报, 2008, 3(4): 481-486.
LI Run-wei, CAI Zi-xing, TONG Yu. Improving the accuracy of exploring the narrow environment by using ATM[J]. CAAL Transactions on Intelligent Systems, 2008, 3(4): 481-486.
[28] 崔益安, 蔡自兴, 李潇晨. 自组分层式多机器人体系结构[J]. 小型微型计算机系统, 2008, 29(7): 1263-1267.
CUI Yi-an, CAI Zi-xing, LI Xiao-chen. Self configurable and layered architecture of multi-robot[J]. Journal of Chinese Computer Systems, 2008, 29(7): 1263-1267.
收稿日期:2009-08-17;修回日期:2009-11-20
基金项目:国家自然科学基金重大专项资助项目(90820302);国家自然科学基金青年资助项目(60805027);国家博士点基金资助项目(200805330005)
通信作者:任孝平(1984-),男,山西平遥人,博士研究生,从事多机器人系统,无线网络通信等研究;电话:0731-82655993;E-mail: xiaopingren@gmail.com
(编辑 刘华森)

