一类欠驱动机械系统轨迹跟踪的滑模控制方法
廖煜雷,庞永杰
(哈尔滨工程大学 水下智能机器人技术重点实验室,黑龙江 哈尔滨,150001)
摘要:讨论一类欠驱动机械系统存在模型参数不确定性影响下的轨迹规划和跟踪控制问题。对于给定二维惯性平面内的光滑期望轨迹,由规划方法获得随船坐标系下的参考跟踪速度和加速度。基于滑模控制理论设计轨迹跟踪控制器,借助Lyapunov函数,证明该控制器能保证轨迹跟踪系统的渐近稳定性。进行大量的数值仿真试验,控制器实现了对封闭或开放型轨迹的跟踪以及定位控制,试验结果验证所提方法的有效性。
关键词:欠驱动;机械系统;轨迹跟踪;滑模控制;非线性
中图分类号:TP24;TP273 文献标志码:A 文章编号:1672-7207(2011)S1-0219-09
Sliding-mode trajectory tacking control for a class of underactuated mechanical system
LIAO Yu-lei, PANG Yong-jie
(National Key Laboratory of Science and Technology on Autonomous Underwater Vehicle,
Harbin Engineering University, Harbin 150001, China)
Abstract: The trajectory planning and tacking control for a class of underactuated mechanical system with parametric modeling uncertainty was addressed in this paper. Given a smooth, inertial, 2D desired trajectory, the planning method uses vehicle dynamics to compute the body-fixed reference velocities and accelerations. The trajectory tacking controller was proposed based on sliding-mode control approach. By means of Lyapunov function, it was proven that the trajectory tacking system is asymptotically stability under the controller. Several simulations were presented where the vessel successfully follows a closed-loop or open-loop desired trajectory and fulfils positioning control. The effectiveness of the presented controller was validated in simulation results.
Key words: underactuated; mechanical system; trajectory tacking; sliding-mode control; nonlinear
文中研究对象是水面船舶、潜水艇、水下机器人、海洋平台等一类海洋机械系统。出于经济性、质量限制、布置方便等考虑这些机械系统往往是欠驱动的;或系统可靠性需求,即由于驱动器故障导致全驱动的系统变为了欠驱动系统。欠驱动海洋机械系统(Underactuated marine mechanical system, UMMS)轨迹跟踪控制的难点在于:(1)欠驱动特性是特殊的非线性问题,目前的许多非线性解决方法不能直接应用到欠驱动控制中[1]。(2)动力学模型存在二阶非完整约束[2],不能被反馈线性化。(3)模型具有强非线性、不确定性以及强耦合性。国内外的学者对UMMS开展了大量的理论和试验研究[3-7]。
目前UMMS轨迹跟踪问题的主要解决方法有反馈线性化法、Lyapunov直接法、反步法(Backstepping)、鲁棒控制、级联系统方法以及滑模控制等。Al-hiddabi等[8]采用了反馈线性化方法,但动力学方程求逆需满足严格的限定条件,其应用受到了一定限制,并且不能保证零动态的稳定性。然而Lyapunov方法没有上 述方法的限制。Do和Pettersen等[9-10]均基于Lyapunov方法实现了轨迹跟踪控制,而这些方法均没有考虑到UMMS运动中强非线性,尤其是不确定性的影响。Aguiar等[11]考虑模型的不确定性影响,基于Lyapunov方法提出了轨迹和路径跟踪联合控制律,该方法取得了良好控制效果。Encarnacao等[12]在Serret Frenet坐标系下设计非线性控制策略,保证水下机器人全局收敛到期望路径。但是没有考虑模型不确定性和海流等环境干扰的影响。Repoulias等[13]讨论了欠驱动水下机器人的轨迹规划和跟踪问题,利用积分反步法设计了跟踪控制器。Ashrafiuon等[14]利用滑模控制方法设计了轨迹跟踪控制器,水池试验表明具有良好的控制效果。但存在实际轨迹起点必须在期望轨迹上的限制条件,且不能跟踪定速圆型轨迹。Soltan等[15]通过改进轨迹规划方法,解决了文献[14]的上述问题。但存在初始位置不能在期望圆轨迹圆心的限制,且对其它形式轨迹的跟踪能力有待验证。同时,上述文献均忽略了二阶阻尼力的影响。
本文中考虑更为一般的UMMS动力学数学模型,针对其轨迹跟踪问题和上述文献的局限。借鉴空空导弹制导的思想,考虑到UMMS实际机动能力的限制因素,提出了对光滑期望轨迹进行跟踪的轨迹规划方法。该方法解决了文献[14]对实际轨迹起点需在期望轨迹上的限制问题,且能跟踪多种运动轨迹。与文献[15]相比,该方法不但能跟踪圆轨迹,还能跟踪其它封闭或非封闭型的运动轨迹。本文作者中基于滑模控制方法设计一种轨迹跟踪控制器,利用Lyapunov函数,证明该轨迹跟踪系统的全局渐近稳定性。仿真结果验证上述方法的有效性。
1 控制问题描述
1.1 数学模型
讨论UMMS在水平面内运动的轨迹跟踪控制问题,以水面船舶为例描述其运动模型,如图1所示。该系统仅有的控制输入是纵向推力和艏向控制力矩。
考虑假设条件:(1)惯性矩阵和阻尼矩阵都是定常对称矩阵,忽略非对角线元素的影响。已知模型参数的估计值,存在不确定性且有界;(2)忽略垂荡、纵摇和横摇的影响;(3)忽略三阶以上的水动力项。UMMS的动力和运动学模型可由以下微分方程来描述[16]:
 (1)
(1)
式中:x和y表示船舶重心在惯性坐标系{I}中的位置, 是船舶的艏向角;μ,υ和r分别表示在随船坐标系
是船舶的艏向角;μ,υ和r分别表示在随船坐标系 中船的纵向、横向和偏航(角)速度;纵向力
中船的纵向、横向和偏航(角)速度;纵向力 和转艏力矩
和转艏力矩 是仅有的控制输入;
是仅有的控制输入; 是惯性系数,
是惯性系数, 分别表示线性和二阶阻尼系数,均假设为正常数。由于系统(1)的υ-方程中没有横向控制输入,因此该系统是欠驱动的。
分别表示线性和二阶阻尼系数,均假设为正常数。由于系统(1)的υ-方程中没有横向控制输入,因此该系统是欠驱动的。
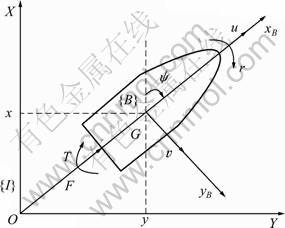
图1 水面船舶的水平面内运动模型
Fig.1 Planar motion model of the ship
1.2 轨迹规划
本节讨论期望轨迹的规划问题。期望轨迹的约束条件是该轨迹必须充分光滑,即要求是连续的、惯性平面内的曲线,且轨迹对时间的三阶导数存在。
对于UMMS的轨迹跟踪,假设在惯性系{I}中UMMS重心G所要跟踪的轨迹是惯性系下坐标 关于时间的函数,下标d表示期望变量,以下同。对时间的一阶、二阶和三阶导数分别表示为
关于时间的函数,下标d表示期望变量,以下同。对时间的一阶、二阶和三阶导数分别表示为 。
。
 (2)
(2)
式中: 和
和 表示UMMS在跟踪期望轨迹过程中的参考速度(惯性系中),下标“r”表示参考变量;
表示UMMS在跟踪期望轨迹过程中的参考速度(惯性系中),下标“r”表示参考变量; 为正常数,表示UMMS朝向目标轨迹运动的最大接近速度,它们的大小由UMMS的机动能力决定,可经试验获得;
为正常数,表示UMMS朝向目标轨迹运动的最大接近速度,它们的大小由UMMS的机动能力决定,可经试验获得; 影响着轨迹跟踪过程的动态行为。通过坐标变换,随船坐标系下的参考跟踪速度
影响着轨迹跟踪过程的动态行为。通过坐标变换,随船坐标系下的参考跟踪速度 和加速度
和加速度 可表示为:
可表示为:
 (3)
(3)
UMMS的轨迹跟踪问题可描述为:设计轨迹跟踪控制器以保证UMMS快速地跟踪参考速度,并最终实现对期望轨迹的跟踪。
2 滑模控制理论
滑模变结构控制是一种非连续控制方法,其非线性表现为一种使系统“结构”随时间变化的开关特性,该控制特性可以迫使系统沿着规定的状态轨迹作小幅度的上下振动,同时,对外界干扰及参数不确定性具有良好的鲁棒性能,最终到达期望状态,即所谓的“滑动模态”。
在滑模变结构控制方法中,定义了一系列关于跟踪误差函数的渐近镇定切换面S,使得系统所有的状态在有限时间内(参考时间tr)到达所设计的切换流形,而且系统轨迹能够保持在滑模表面(S=0)上直到其收敛到原点为止。定义预选Lyapunov函数 ,如果其时间导数
,如果其时间导数 是负定的,那么系统就是Lyapunov稳定的。针对UMMS系统,定义两个滑模表面来确定控制输入,因此,每个滑模表面的可达条件表示为[14]:
是负定的,那么系统就是Lyapunov稳定的。针对UMMS系统,定义两个滑模表面来确定控制输入,因此,每个滑模表面的可达条件表示为[14]:
 (4)
(4)
式中:ηi是正常数,决定了状态轨迹到达滑模表面Si的速度,即 。
。
考虑下列二阶仿射非线性系统
 (5)
(5)
式中:x为状态变量, 为非线性连续光滑函数,u为控制输入。定义系统跟踪误差为:
为非线性连续光滑函数,u为控制输入。定义系统跟踪误差为:
 (6)
(6)
式中:xr为系统参考输入,控制目标是设计控制律u以跟踪参考输入。令导数 的误差为
的误差为 ,则滑模表面S一般定义为:
,则滑模表面S一般定义为:
 (7)
(7)
这样参考控制律可表示为:
 (8)
(8)
式中: 为符号函数。
为符号函数。
如果这个控制策略满足可达条件(4),那么就可以保证系统轨迹从任意起始点都能够朝向滑模表面运动并稳定在滑模表面 上。
上。
这个非连续控制律的缺点是将引起系统的“抖振”现象,实际应用中执行器也难以产生非连续的控制行为。为改善系统的“抖振”问题,可采用具有边界层的滑模变结构控制方法[17]
 (8)
(8)
式中: 为边界层厚度,
为边界层厚度, 为饱和函数
为饱和函数
 (9)
(9)
3 控制系统设计
下面基于滑模控制理论,借鉴文[14]的设计思想,分别进行纵向和横向跟踪控制器的设计。
3.1 纵向控制器设计
纵向滑模表面采用一阶的指数镇定面,由UMMS纵向速度的跟踪误差,该滑模表面可定义为:
 (10)
(10)
式中: 表示纵向速度跟踪误差,即实际值u和参考值ur的偏差。
表示纵向速度跟踪误差,即实际值u和参考值ur的偏差。
为了计算零动态下的名义纵向控制律,将式(10)求导,并设其导数为零,可得等式
 (11)
(11)
利用上节中滑模控制器的设计方法,可得到纵向滑模控制律为:
 (12)
(12)
式中: ,符号
,符号 用于表示估计的力和模型参数,下同。为了确定控制函数
用于表示估计的力和模型参数,下同。为了确定控制函数 ,对(1)式中的模型参数定义如下的不确定界限:
,对(1)式中的模型参数定义如下的不确定界限:
 (13)
(13)
定义一个预选Lyapunov函数为:
 (14)
(14)
将式(14)对时间求导,将式(1)和式(12)代入可得

 (15)
(15)
如果选择选为:

 (16)
(16)
则预选Lyapunov函数 满足下面的可达条件
满足下面的可达条件
 (17)
(17)
3.2 横向控制器设计
将横向滑模表面定义为二阶的指数镇定面,由UMMS横向速度的跟踪误差,该滑模表面可定义为:
 (18)
(18)
式中: 表示横向速度跟踪误差,即实际值υ和参考值υr的偏差。
表示横向速度跟踪误差,即实际值υ和参考值υr的偏差。
为了计算零动态下的名义艏向控制律,将式(18)求导,并设其导数为零,可得等式
 (19)
(19)
式中:由(1)式和(3)式分别求导可得:
 (20)
(20)
 (21)
(21)
式中: 。
。
将式(1),(20)和(21)代入式(19)中,可得名义艏向控制律为:
 (22)
(22)
h和b的表达式如下:
 (23)
(23)

 (24)
(24)
同样可得到横向滑模控制律为:
 (25)
(25)
注意:如果 将导致式(25)的奇异性。由于控制过程需要纵向速度非零,依据模型参数可知有
将导致式(25)的奇异性。由于控制过程需要纵向速度非零,依据模型参数可知有 成立,即只有当纵向速度跟踪误差大于20%才会出现奇点。因此,假设在任何时候都能满足
成立,即只有当纵向速度跟踪误差大于20%才会出现奇点。因此,假设在任何时候都能满足 。
。
为了确定控制函数 ,定义如下预选Lyapunov函数
,定义如下预选Lyapunov函数
 (26)
(26)
将式(26)对时间求导,并把式(19)~(25)代入可得
 (27)
(27)
如果选择为:
 (28)
(28)
式中: 为
为 的不确定性界限,由式(13)中模型参数的不确定性来确定;β的范围依赖于b的几何平均数,详细定义见文[14]。
的不确定性界限,由式(13)中模型参数的不确定性来确定;β的范围依赖于b的几何平均数,详细定义见文[14]。
 (29)
(29)
则预选Lyapunov函数满足下面的可达条件
 (30)
(30)
3.3 系统稳定性分析
控制系统的上述设计过程表明,纵向力和艏向力矩控制律式(12)和式(25)分别满足了式(17)和式(30)的可达条件。这两个可达条件分别保证了状态轨迹
在有限时间 内(其中
内(其中 ,
, )到达相应的滑模表面
)到达相应的滑模表面 和
和
 。同时(10)和(18)式描述的滑模表面是渐近稳定的。因此状态轨迹将保持在滑模面上,并指数收敛到原点,即满足
。同时(10)和(18)式描述的滑模表面是渐近稳定的。因此状态轨迹将保持在滑模面上,并指数收敛到原点,即满足

 (31)
(31)
可见UMMS在式(1)中所描述的运动学关系保证了在其惯性系下的轨迹跟踪能力。
为了证明艏摇运动 是有界输入有界输出稳定的(BIBO),定义如下预选Lyapunov函数V3
是有界输入有界输出稳定的(BIBO),定义如下预选Lyapunov函数V3
 (32)
(32)
将式(32)对时间求导,并把式(1)代入可得
 (33)
(33)
在一定条件下,有下式成立。
 (34)
(34)
由式(32)可知:如果V3是递减函数,则|r|也是递减函数,式(34)表明当

 时,V3是递减函数。因为
时,V3是递减函数。因为 有界,这决定|r|具有一个有限的上界
有界,这决定|r|具有一个有限的上界 。即艏摇运动r满足有界输入有界输出稳定性(BIBO)。
。即艏摇运动r满足有界输入有界输出稳定性(BIBO)。
4 仿真试验和分析
为验证所提出UMMS轨迹跟踪控制器的有效性,以水面船舶为例,进行了大量的数值仿真试验。仿真中船模仅有的控制输入是推力和转艏力矩,并考虑推力和转艏力矩存在饱和性限制,船模的具体参数如下:
考虑到船模的机动能力,选取轨迹规划的参数为:

4.1 封闭型轨迹跟踪
首先讨论封闭型轨迹的跟踪问题,以式(35)描述的圆形运动轨迹为例。以下数值仿真中UMMS的初始位置皆为: ;初始速度皆为
;初始速度皆为 。控制参数选为
。控制参数选为
 。仿真结果如图2所示。
。仿真结果如图2所示。
 (35)
(35)
从图2可以看出:在控制律作用下,UMMS能快速地跟踪期望轨迹(只需30 s),并最终沿圆轨迹运动。系统状态 以及控制力和力矩的输出响应曲线平滑,没有产生“抖振”现象。跟踪过程所需的控制力和力矩较小,易于工程实现。试验表明跟踪控制系统具有良好的动态控制性能。
以及控制力和力矩的输出响应曲线平滑,没有产生“抖振”现象。跟踪过程所需的控制力和力矩较小,易于工程实现。试验表明跟踪控制系统具有良好的动态控制性能。
如选择UMMS的初始位置在期望轨迹的圆心处,即初始条件: 。仿真结果如图3所示,UMMS依然能很好地跟踪上圆形轨迹,而没有文献[15]中对于UMMS初始位置不能在期望轨迹圆心的限制。
。仿真结果如图3所示,UMMS依然能很好地跟踪上圆形轨迹,而没有文献[15]中对于UMMS初始位置不能在期望轨迹圆心的限制。
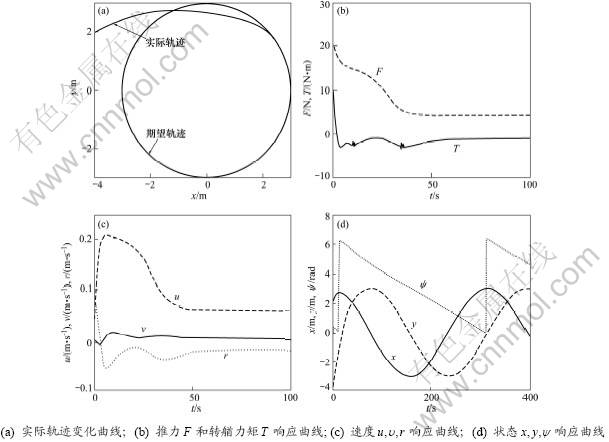
图2 圆形轨迹跟踪
Fig.2 Circular trajectory tracking
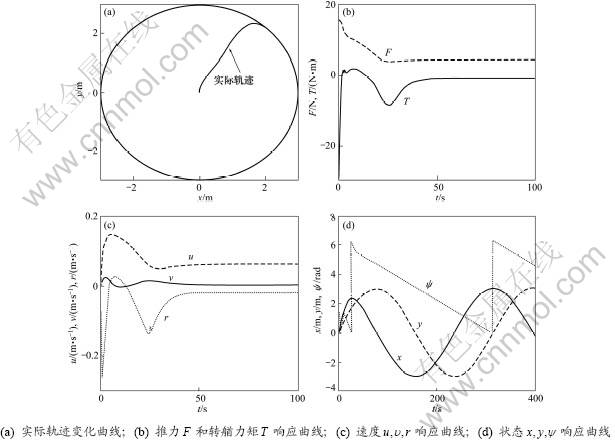
图3 圆形轨迹跟踪
Fig.3 Circular trajectory tracking
4.2 开放型轨迹跟踪
本节讨论开放型运动轨迹的跟踪问题,这在工程应用中很常见,如直航、按规划的航线航行等,以式(36)描述的余弦轨迹为例。控制参数选为: 
 仿真结果如图4所示。
仿真结果如图4所示。
 (36)
(36)
从图4可看出:UMMS在30 s即能平稳地跟踪上余弦运动轨迹,且控制所需的力和力矩较小,在实际应用中意味着更短的时间和能量消耗。同样,控制器也能跟踪直线(直航)等其他开放型轨迹。
4.3 镇定控制
实际应用中UMMS需要进行镇定控制(即定位控制或自动靠泊操作,这对于工程船或海洋平台尤其重要)。作为轨迹跟踪问题的特例,文中的控制器可以用于镇定控制中。期望位置为坐标原点,控制参数选
为:



 。仿真结果如图5所示。
。仿真结果如图5所示。
从图5可看出:系统状态轨迹 和输出光滑,控制器驱使UMMS快速地镇定到了原点处,镇定控制同样具有良好的动态性能。
和输出光滑,控制器驱使UMMS快速地镇定到了原点处,镇定控制同样具有良好的动态性能。
4.4 模型不确定下的轨迹跟踪
讨论模型存在不确定性下的轨迹跟踪问题,假设模型参数具有10%的不确定性,考虑一种极端情况:

 ,其他仿真
,其他仿真
条件同4.2节一致,仿真结果如图6所示。
从图6可看出:由于存在建模误差,UMMS在40 s后才跟踪上期望轨迹(无建模误差时只需30 s)。另外,所需的控制力矩较大,且输出曲线没有模型无误差时光顺。对比图4和6可知:该控制器能有效抑制建模误差,快速地跟踪上期望轨迹,并具有良好的动态性能。
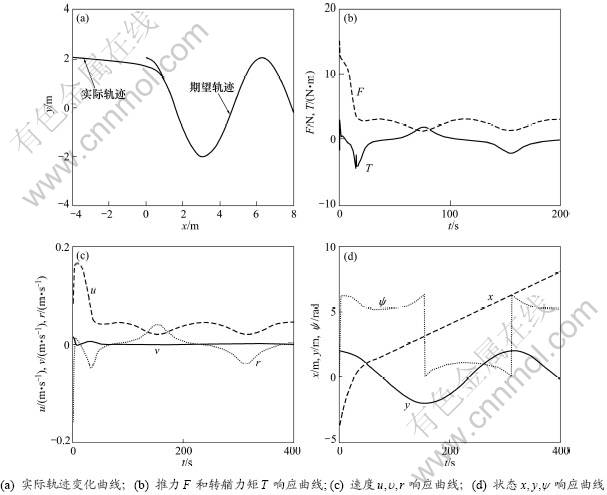
图4 余弦轨迹跟踪
Fig.4 Cosine trajectory tracking

图5 镇定控制
Fig.5 Positioning control
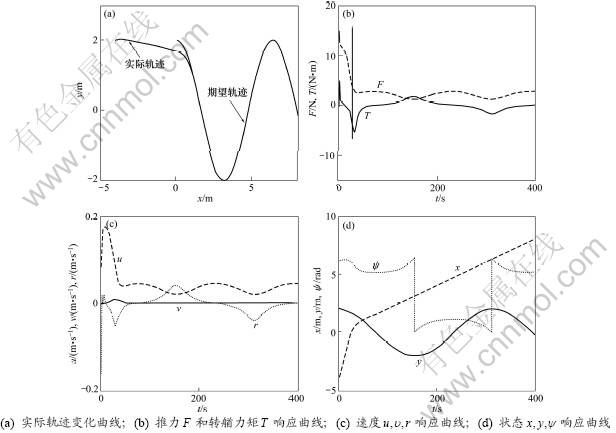
图6 模型存在不确定下的余弦轨迹跟踪
Fig.6 Cosine trajectory tracking with modeling uncertainty
5 结语
讨论了一类欠驱动机械系统的轨迹跟踪控制问题,基于滑模变结构控制方法,提出了一种轨迹跟踪控制器,得到如下结论:
(1) 针对存在模型不确定性影响下的UMMS动力学模型,基于滑模变结构控制方法分别设计了纵向和横向跟踪控制器。利用Lyapunov函数,证明该控制器保证了轨迹跟踪系统的渐近稳定性。
(2) 考虑存在建模误差影响,仿真试验表明控制器能有效抑制建模误差,并具有良好轨迹跟踪性能。
(3) 利用文中轨迹规划方法,轨迹跟踪控制器可实现对一类曲线、直线轨迹的跟踪和镇定控制。
理论分析和数值仿真试验均验证了所提出跟踪控制系统的有效性。
参考文献:
[1] Sankaranarayanan V, Banavar R N. Stabilization of an underwater vehicle[C]//Proceedings of the 16th IFAC World Congress. Prague: Czech Republic, IFAC, 2005: 251-259.
[2] Jiang Z P. Global tracking control of underactuated ships by Lyapunov’s direct method[J]. Automatica, 2002, 38(2): 301-309.
[3] Lefeber A, Pettersen K Y, Nijmeijer H. Tracking control of an underactuated ship[J]. IEEE Transactions on Automatic Control, 2003, 11(1): 52-61.
[4] Auiar A P, Cremean L, Hespanha J P. Position tracking of a nonlinear underactuated hovercraft: controller design and experimental results[C]//Proceedings of the 42nd IEEE Conference on Decision and Control. Maui: Hawaii USA, IEEE, 2003: 3858-3863.
[5] Do K D, Pan J. Robust path-following of underactuated ships: theory and experiments on a model ship[J]. Ocean Engineering, 2006, 33(10): 1354-1372.
[6] Do K D, Pan J. Underactuated ships follow smooth paths with integral actions and without velocity measurements for feedback: Theory and experiments[J]. IEEE Transactions on System Technology, 2006, 14(2): 308-322.
[7] Do K D, Pan J, Jiang Z P. Robust and adaptive path following for underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2004, 31(16): 1967-1997.
[8] Al-Hiddabi S, Mcclamroch N. Tracking and maneuver regulation control for nonlinear nonminimum phase systems: Application to flight control[J]. IEEE Transactions Control Systems Technology, 2002, 10(6): 780-792.
[9] Do K D. Universal controllers for stabilization and tracking of underactuated ships[J]. Systems & Control Letters, 2002, 47(4): 299-317.
[10] Pettersen K Y, Nijmeijer H. Tracking control of an underactuated ship[J]. IEEE Transactions Control Systems Technology, 2003, 11(1): 52-61.
[11] Aguiar A P, Hespanha J P. Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty[J]. IEEE Transactions on Automatic Control, 2007, 52(8): 1362-1365.
[12] Encarnacao P, Pascoal A. 3D path following for autonomous underwater vehicle[C]//Proceedings of the 39th Conference on Decision and Control, and the European Control Conference 2005. Sydney: Australia, IEEE, 2005: 2977-2982.
[13] Repoulias F, Papadopoulos E. Planar trajectory planning and tracking control design for underactuated AUVs[J]. Ocean Engineering, 2007, 34: 1650-1667.
[14] Ashrafiuon H, Muske K R, Mcninch L, et al. Sliding model tracking control of surface vessels[J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 4004-4011.
[15] Soltan R A, Ashrafiuon H, Muske K R. State-dependent trajectory planning and tracking control of unmanned surface vessels[C]//Proceedings of 2009 American Control Conference. Hyatt Regency Riverfront: IEEE, 2009: 3597-3602.
[16] Fossen T I. Marine control systems-guidance, navigation and control of ships, rigs and underwater vehicles[M]. Trondheim, Norway: Marine Cybernetics, 2002: 50-110.
[17] Khalil H K. Nonlinear systems[M]. Upper Saddle River, NJ: Prentice-Hall, 1996: 552-579.
(编辑 陈爱华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(61004008);中央高校基本科研业务费专项资金资助项目(HEUCFZ1003)
通信作者:廖煜雷(1985-),男,重庆人,博士研究生,从事欠驱动无人水面艇的运动控制研究;电话:18903658103;E-mail: liaoyulei@hrbeu.edu.cn

