����ˮѹ������ϵͳ˲�为�صĿ��Ʋ���
���̷��ƽ�����ᣬ����ǿ
(���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժҪ����Դ���ˮѹ��Һѹ����ϵͳ�ĸ���������˲����ص㣬�����ģ��ṹ�����뾫ȷ���Ի����ϵĸ��Ͽ��Ʋ��ԣ����þ�ȷ���Ի����Ʋ������ϵͳ����̬���ԣ���ṹ���Ʋ��Բ���˲�为�صĸ��ţ����һ�����Ƶ������ɵ�����������ź����Խ��Ϳ����źŵĶ�������֤�����Ͽ��Ʋ���������ϵͳ���ȶ��ԡ�ͨ������ϵͳ����ѧģ�ͷ���Աȸ��Ͽ��Ʋ����봫ͳPID���ƺ;�ȷ���Ի����ƵĶ�̬��Ӧ���������ϲ���Ӧ���ڴ���ˮѹ��Һѹ����ϵͳ��������������Ͽ��Ʋ�������Ч������˲�为�ض�ϵͳ��Ӱ�죬ϵͳ����������Ӧʱ����0.6 s�ڣ�ת�ǵ������������4%���ڣ������Һѹ����ϵͳ��³���ԺͿ��ƾ��ȡ�
�ؼ��ʣ�����ˮѹ��������ϵͳ����ȷ���Ի������Ʊ�ṹ��˲�为��
��ͼ����ţ�TP271+.3 ���ױ�־�룺A ���±�ţ�1672-7207(2014)02-0421-07
Control strategy of hydraulic operation system under transient load in large hydraulic press
YANG Jun, TAN Jianping, CHEN Ling, SHU Zhaoqiang
(School of Mechanical and Electrical Engineering, Central South University, Changsha, 410083, China)
Abstract: Considering the large transient load in the hydraulic press operation system, a compound control strategy based on input-output linearization (I-Olin) control and sliding mode variable structure (VSC) control was presented. I-Olin was used to improve system��s steady characteristic and VSC controller was designed to compensate influence of the transient load. The control signal��s shake was reduced by using an approximate continuous derivative function instead of the sign function. The system stability was proved under the compound control strategy. The dynamic characteristics of compound control were compared to other control strategy like PID and I-Olin. The compound control strategy was applied in the large hydraulic press. The results indicate that I-Olin with VSC can improve system robustness and control precision. The effect of transient loads on the system is effectively limited. There is no overshoot at all. The response time of the cam is within 0.6 s and the relative error of the angle is less than 4%.
Key words: large hydraulic press; operation system; input-output linearization (I-Olin); approximate variable structure; transient load
����ˮѹ����ͳ��ˮ·������ʽ��ͨ���˹����ݴ��ѻ�������ˮ����о�����գ�ʵ��ˮѹ�����ٶ���λ�ÿ��ơ����ֿ��Ʒ�ʽ��Ч�ʺ;��ȶ��ܵͣ�����Ӱ���˲�Ʒ������������Ч�ʡ������ִ���Һ���Ƽ����ķ�չ�����¼������봫ͳˮѹ������������ˮѹ����Ч������ƾ��ȡ�ͨ�����һ��Һѹ����ϵͳ������ͳ�Ĵ���ɡ�ˮ��ˮ�������һ�ס��Ϳ�ˮ����ϵͳ��ͨ��������λ��������ˮ����о�����գ����ַ�ʽ���ִ�ˮѹ���ĸ����ϵõ��˹㷺Ӧ��[1-2]������ˮ����о�ڿ�����ʼ�Σ��������ܴ��Ҵ��ڲ�ȷ���ԣ����Խ�����Ϊ��һ��˲��ĸ��ء���ͳ�Ŀ��Ʒ�ʽ�������㷧о�ĸ߾��ȿ��ơ���������[3]����Һѹλ���ŷ�ϵͳ��������������ϵͳ�ĸ���Ч�����ã����Ƚϵͣ���������̬���Ƴ�����[4]��300 MNģ��ˮѹ������PID-H���Ʋ��ԽϺõؽ����˲����Ƶ����⣬���Dz���³�����ƻή�������ܣ��Ҽ�������ö�ϵͳģ��Ҫ��ȽϾ�ȷ�������ڸ��ӻ������ֳ�Ӧ�á�����ˮѹ������ϵͳʵ����һ��Һѹλ���ŷ�ϵͳ�����Һѹϵͳ�IJ����IJ�ȷ����������Ժ��ⲿ���ŵĸ����ԣ�������ѧ�߽����������о�������˺ܶ����͵Ŀ��Ʋ��ԣ����������㷨�ĸ����Ժ�ҵ�ֳ��Ļ������⣬�ֽκܶ���Ʋ����ڹ�����ʵ���кܴ���Ѷȣ�����Ч�����Ǻ�����[5-10]����ȷ���Ի��ǻ����ּ��εķ����Կ��Ʋ��ԣ��ڶԴ��Ŷ��ʹ������������ķ�����ϵͳ�нϺõĿ�������[11]���Ҷ�ϵͳ�����ı仯���к�ǿ���ȶ���[12]�����ھ�ȷ���Ի��ǽ�����������ת���ɼ�����������������������������ĵ����������⣬���ԣ���Һѹ�����ϵõ��˹㷺Ӧ�á����ǣ���ȷ���Է������⸺�صĶ�̬�����нϴ�Ķ�̬�����������ʺ�ˮѹ�����⸺�ظ����Ե��ص㡣����ģ��ṹ����ʹϵͳ��һ�����������ع涨��״̬�켣����С���ȡ���Ƶ�ʵ������˶�������Ч�ؽ��ϵͳ����ʱ�䣬ʱ�ͺ�˲������⣬��Һѹϵͳ��λ�á��ٶȺ��������еõ��˹㷺Ӧ��[13-15]�����������ھ�ȷ���Ի��ͱ�ṹ�������һ�����Һѹϵͳ���ھ�˲�为�صĸ��Ͽ��Ʋ��ԣ����þ�ȷ���Ի����Һѹϵͳ��̬���ԣ����ñ�ṹ���Ʋ��Բ���˲�为�ظ��š��ò��Ծ�����Ƽ���������������ص㣬�����Ʋ���Ӧ���ڴ���ˮѹ������ϵͳ����֤ϵͳ��³���ԺͿ��ƾ������⡣
1 ����ϵͳ�Ĺ���
����ˮѹ���IJ���ϵͳʾ��ͼ��ͼ1��ʾ������Һѹ�������֡����Ʋ��֡���λ�����ּ�һ��о����װ�á�
Һѹ�������ְ�����վ���丽����ʩ��Ϊ����ϵͳ�Ĺ����ṩ���������Ʋ�����PLC�������豸��ɣ�����������λ������ָ�Ϊ����������������������Ϣ����λ�����ְ�����λ���������ֱ��ȣ���Ҫ�ṩ���ƵIJο�ָ���ϵͳ״̬��أ���о����װ���ɳ��ֳ������ֶ��˻�����ɣ���Һѹ��λ��ת��ɷ�о��λ�ƣ�ʵ��ˮѹ�������չ��̡�

ͼ1 ����ϵͳԭ��ͼ
Fig. 1 Schematic diagram of operation system
���ƹ���Ϊ��ͨ�����������ֵ�ת��ʵ�ַ������Ƚ��ֱ�ת������ת�ǵIJ�ֵ��ʵ�ֲ���ϵͳ�ջ����ơ��Ӷ�ʵ�ֶ�ˮ·������ϵͳ�ķ���������ľ�ȷ���ƣ�Ϊ�����ϵͳ���Ƶľ��Ⱥ��ȶ��ԣ�������ϵͳ�����һЩ���Ʋ��ԡ�
2 ����ϵͳ�����ص�
����ˮѹ��һ��Ϊ��-�������Ĵ�����ʽ��ͨ������о�Ŀ�����ر�ʵ��ˮѹ���Ķ������̡�������ˮ���Ľṹ������ͬ�������ᷧ�࣬һ�����ƽ��ʽ��йѹ���Ľṹ����������װ��ֱ����С���ȵ�йѹ������������Ϊ��ͨ������ϵͳ�������֣����������϶�������йѹ��йѹ��������ǻ��ѹ��Ѹ�ټ�С��������������С��Ȼ�������������������������о���ڶ�������������
����ˮѹ��������ѹ���ܸߣ�һ��Ϊ30 MPa���ϣ���ˣ���ʹ����йѹ����о�Ŀ�����Ҳ�Ǿ�ġ�����[16]�������嶯��ѧ���ۣ�ͨ�����������ᷧ����ѧģ�Ͳ��Դ���ˮѹ�����������з������õ���ˮѹ���ķ�о����������о��������ͼ2��ʾ����ͼ2�ɼ����ڿ�ʼ�ο�������С��֮��ͻȻ����Ȼ��Ѹ�ټ��١�����λ���жԲ���ϵͳҺѹ��վ��ѹ�����м����������õ�ˮѹ��������������ij��ʱ���ڵ�ѹ�����ߣ���ͼ3��ʾ������ͼ3��֪����ѹ������һϵ�е�ͻ�����ߣ�����������������ѹ��ͻȻ�仯�ģ�Ҳ֤���˸�����һϵ�е�˲���غɡ�
�����ϵķ�����֪��ϵͳ���ص��ص��ǿ�����˲����Ҫ�Ŀ������ܴ�Ȼ��ͻȻ��С���غɴ���˲�䡣�������������ϼ��ɶ����о��һ�ι�����Ҫ���������о�����ԣ�������һϵ�е�˲���غɵ��Ӷ��ɡ�
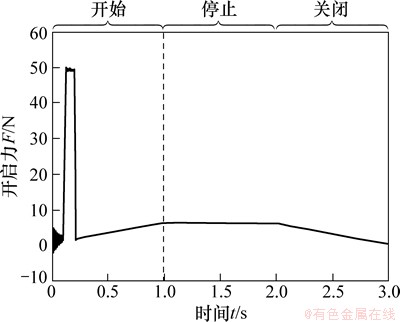
ͼ2 ��о������
Fig. 2 Force of valve open
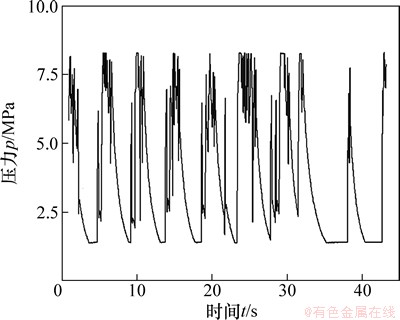
ͼ3 ��ѹ��
Fig. 3 Pressure of cylinder
3 ˲�为����Һѹ���Ʋ���
3.1 ϵͳ����ѧģ��
����ˮѹ������ϵͳ��һ�����͵ķ��������ϵͳ����ϵͳ�����״̬������Ϊ�����ԣ��Կ���������Ϊ���ԣ�������ϵͳ�Ĺ��Ը������������ã������䵯�Ը��أ�״̬�ռ����ʽ��д��[17-18]��
 (1)
(1)
����
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
 ��
�� (8)
(8)
y�� ��
�� �ֱ�ΪҺѹ��λ�ơ��ٶȺͼ��ٶȣ�pA��pB�ֱ�Ϊ��ǻ��ѹ����VA��VB�ֱ�Ϊ�����ܵ���Һѹ�������FL��Ff�ֱ�Ϊ�ĸ�������Ħ������AA��AB�ֱ�Ϊǻ�����������m��E��Ct�ֱ�Ϊ����������Һѹ�͵����ģ����Һѹ��й¶ϵ����Ϊ������QN��pN�ֱ��DZ����������������Ͷѹ����p0��pT�ֱ���Һѹ�õĹ���ѹ��������ѹ����xvΪ��о��λ�ơ�
�ֱ�ΪҺѹ��λ�ơ��ٶȺͼ��ٶȣ�pA��pB�ֱ�Ϊ��ǻ��ѹ����VA��VB�ֱ�Ϊ�����ܵ���Һѹ�������FL��Ff�ֱ�Ϊ�ĸ�������Ħ������AA��AB�ֱ�Ϊǻ�����������m��E��Ct�ֱ�Ϊ����������Һѹ�͵����ģ����Һѹ��й¶ϵ����Ϊ������QN��pN�ֱ��DZ����������������Ͷѹ����p0��pT�ֱ���Һѹ�õĹ���ѹ��������ѹ����xvΪ��о��λ�ơ�
����ʽ(1)����ϵͳ��������һ��Ĺ�ҵ�ֳ�����Ҫ���ǹ�ҵ�ֳ��Ļ��������ԺͲ�ȷ���Ե���Һѹϵͳ�IJ����Dz�ȷ���Ļ�����δ֪�ģ�����ֻ�ܵõ�����ȷ��ϵͳ�Ķ�̬���ԣ����ȫ�濼����Щ���ص�Ӱ�죬������������൱���ӣ������ᵼ��ϵͳ���ȶ���
Ϊ���ø����Ʋ��������ڹ�ҵ�ֳ�����Ҫ��ԭʼģ�ͽ��м�����һЩ��Ҫ������й©������һЩ�������й��ƣ��Ա�������������������ɵò���ȷ��Һѹϵͳģ�͡�
 (9)
(9)
 (10)
(10)
 (11)
(11)
���У� ��ʾ��j�Ĺ��ơ�
��ʾ��j�Ĺ��ơ�
3.2 ���Ʋ���
3.2.1 ��ȷ���Ի�������
��ȷ���Ի��ǻ����ּ��εķ��������Կ��Ʒ������ڹ�ҵ������ȡ���˹㷺Ӧ�ã���ȷ���Ի��ķ������������ϵͳ(9)����Խ�Ϊ3��ѡ��ʽ(12)����ͬ�߱任��
 (12)
(12)
���У�Lfh(x)��ʾh(x)��f����������������i�����Ϊ�� ��
��
�õ�������ϵ�е�ϵͳ״̬���̣�
 (13)
(13)
����
 (14)
(14)
 (15)
(15)
ѡ������������Ի�����
 (16)
(16)
 (17)
(17)
���У�xdΪ������λ�ã�e=xd-xΪλ�õ���
3.2.2 ��ģ��ṹ���Ų�����
����ʽ(17)��3������ѡ��Ƚ����ѣ��Ҳ�����ֵ�����Ӱ����˲���غɶ�ϵͳ��Ӱ�죬Ϊ�����ϵͳ��˲̬����̬���ԣ�����ģ��ṹ���Ʋ������뵽������ѡ�����������ڻ�ģ������һ�ֿ��������ƣ�������˲���غɵĿ�ʼ˲������ṩ�ϴ�Ŀ��Ƶ�����ƽ��ϵͳ��˲̬����Ӱ�졣
���廬��ģ̬ƽ�棺
 (18)
(18)
ʽ�У���Ϊ��������Ϊ�˽���ȷ���Ի��������ͻ�ģ��ṹ��������ϵ����ϵ�������趨 ��
�� ��
�� ��
��
���ڷ�о�Ŀ�������һ������ֵ���������Ͻ磬��FL��D����ϵͳ����˲�为��ʱ�����һ��������ʹ ��
��
���յ�Ч�����л����ƣ���ƿ����ɡ�
 (19)
(19)
ʽ�У�k=D+��Ϊ�������棻DΪ����ͻ��ĸ��ز�������Ϊ�����л����ٶȵIJ�����
��ʽ(19)�У����ڷ��ź���sgn(s)�Ĵ��ڣ�����������Ϊ�����������ɣ����������������뽫�����ϵͳ�IJ������ź��������½��ƿɵ�����ʽ���棺
 (20)
(20)
��ϵͳ���յĿ�����Ϊ
 (21)
(21)
3.2.3 ϵͳ³���Է���
ѡ��ʽ(21)���Ի����Ʊ�ṹ������������ʽ(9)�Ŀ���ϵͳ���������³���Է�����
ȡ�����������
 (22)
(22)
��
 (23)
(23)
�� ʱ��
ʱ�� ����ˣ�������ijһʱ�̵��ﲢ�����ȶ�����
����ˣ�������ijһʱ�̵��ﲢ�����ȶ�����
�� ʱ��
ʱ��
 ����ˣ�Ҳ�����ڽ���һ��������ȶ�������ѡ����ʵIJ�����ƵĿ�����(19)���Ա�֤ϵͳ���ȶ��ġ�
����ˣ�Ҳ�����ڽ���һ��������ȶ�������ѡ����ʵIJ�����ƵĿ�����(19)���Ա�֤ϵͳ���ȶ��ġ�
4 ����������ֳ�Ӧ��
4.1 �������
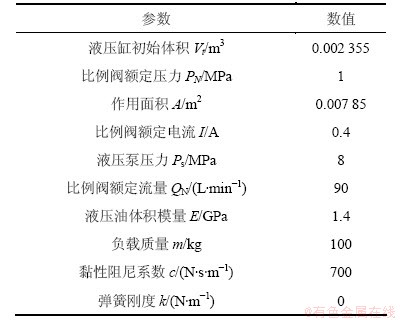
Ϊ��֤���Ʋ�����˲�为�ؿ����еĿ����ԣ�����Matlab-Simulink���н�ģ������������������ģ�Ͱ����ֳ�ʹ�������ѡ�����������˹��˾�ı�������������������Ʒ˵������ѡȡ�������������մ���ˮѹ������ϵͳ�IJ��������1��ʾ��
Һѹϵͳ�Ŀ���ԭ����ͼ4��ʾ���ɲο������źš���������Һѹ����������������ɡ�
��1 Һѹϵͳ������
Table 1 Parameters of hydraulic system
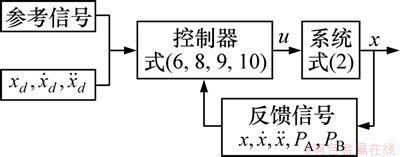
ͼ4 ���Ͽ���ԭ��ͼ
Fig. 4 Schematic diagram of I-Olin with SVC
�ֳ���ͨ�����Ʋ����ֱ�����Һѹ��λ�ƣ����չ�����Ա�IJ���ϰ�ߣ�������Ϊ�Ƕ�ϵͳ����һ����Ծ���룬���ֱ�һ��ת��������λ�á�
����Һѹ�����˵�λ�ƺ��ֵ�ת�Ǵ��ڱ�����ϵ��Ϊ�˷��㣬����ͨ�����������˵Ķ�̬�����������ֵĶ�̬���ԡ�ͼ5��ͼ6��ʾΪģ��Һѹ���ƶ�0.05 mʱϵͳ����Ӧ��������з���ʱ��2 s������ode15�㷨������ʱ��t=0.5~0.6 sʱ����˲�为��FL=20 kN������Ƚ�PID����ȷ���Ի����Ͽ��Ʋ��ԵĶ�̬���ԡ�
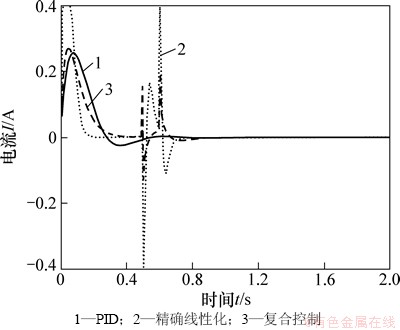
ͼ5 �����źűȽ�
Fig. 5 Comparison of input signal of controllers

ͼ6 ��ͬ���Ʋ��ԵĶ�̬��Ӧ
Fig. 6 Dynamic response of system under different control strategy
ͼ5��ʾΪ�����Ʋ��Եĵ��������������ʵ��������������Ķ����Ϊ0.4 A�����ԣ��趨����������Ϊ0.4 A����ͼ5��֪����ȷ���Ի���ϵͳ�����У����Ƶ����IJ����ܴ����غɱ仯����£������������˲�䣻���Ͽ��Ʋ��Ա仯��֮�����ڼ����˽��ƿɵ������������û�����ԵĶ��������Ƶ����Ƚ�ƽ�ȡ�PID���Ʋ��Զ�ϵͳ���غɱ仯����У�����Ƶ����Ƚ�ƽ�ȣ�ͬʱҲ������PID���Ʋ���ϵͳ�����仯�����С�
��ͼ6��֪���Ա�3����̬��Ӧ���ߣ� PID����ϵͳ�����ų�����������Ϊ20%��ϵͳ��Ӧʱ��ԼΪ0.2 s����ȷ���Ի����Ʋ������ߣ�ϵͳ��������Ӧʱ��ԼΪ0.2 s����ṹ�뾫ȷ���Ի��ĸ��ϲ���ϵͳ������ϵͳ��Ӧʱ��Ƚ������þ�ȷ���Ի�������һ�㡣���Ϸ���������Ӧ���ٶȷ��棬PID��Ӧʱ�������ȷ���Ի����Ͽ��������ǣ�PID���Ʋ��Եij������ϴ�Ӱ����ϵͳ��˲̬���ԡ�
��ϵͳ����̬������棬PID������һ������̬���ﵽ4.5%����ȷ���Ի����Ͽ��Ʋ��Ի����϶�û����̬��˵��PID���Ʋ��Բ��ܽ��ϵͳ�������⡣
�ڶ�˲�为�صĿ������������棬PID���Ʋ��ԽϺã�ϵͳ��λ�Ʋ���������С����Ϊ4%����ȷ���Ի������������ﵽ30%�����Ͽ��Ʋ��ԣ������ﵽ8%����Ȼ������˲����غ�Ӱ�죬PID���Ʋ��Խ��ȶ������Ͽ��Ʋ��Դ�֮����ȷ���Ի���Ҳ˵����ȷ���Ի�������ϵͳ�仯���С�
�ۺ����Ϸ��������ø��Ͽ��Ʋ��ԣ���Ӧʱ��϶̣�����̬����˲���غɲ��Ǻ����У�����Ч���˲�为�غ;�ȷ�����⣬�������ھ�ȷ���Ի��ͱ�ṹ���Ƶĸ��ϲ��Ե��ۺ����ܽϺá�
4.2 �ֳ�ʵ��
���������300 MNģ��ˮѹ��Һѹϵͳ�����õ¹�PVS58I��ת������ת�Dz����ֵ�ת�ǣ��ٶ�����ٶȲ��ö�ת�ǵ�ǰ���ֺ��ٶȲ�ַ�����ã���ǻ��ѹ������WSϵ�е���ʽѹ����������⣬�ֱ���ת��ֱ�����뵽��λ�������������������ת�ǽ��бȽϣ���λ��ϵͳ����AWS8248���ػ�����������WinCC�����ƴ���������PLC������λ���϶Թ��̺ͽ�����ж�̬��ʾ��
�ֳ������ת��������ֱ�����Ӧ������ͼ7��ʾ����ת���ǶȻ��������ֱ�ת���ĽǶȣ�������ת����һ��ʱ����ӳ٣�ԼΪ0.6 s���ȷ���ʱ�䳤��
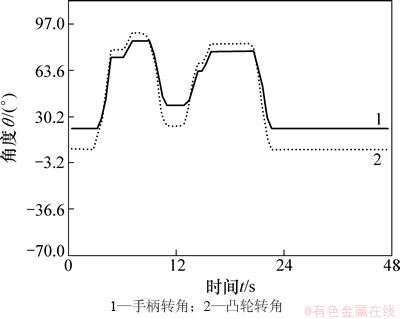
ͼ7 �����ֱ�ת��
Fig. 7 Angle of cam and operation handle
����̬�����������棬ʵ�������������Ͽ��Ƶ���̬���Լ8�㣬���������Ϊ4%�����������˻�еϵͳ�����ͻ������ص�Ӱ��������������Ҫ��һ�����о���
�����Ϸ����ɵã�ϵͳ��ʵ�ʵ���Ӧʱ����ڷ���ʱ�䣬��λ���ٴ���һ������̬�������۽����һ���IJ�ࡣ�����ֳ��Ļ����仯��Һѹϵͳ�IJ�ȷ���Ժͻ�е������ĥ�𡢼�϶��ԭ�����£�Ҳ����һ���о����ص㡣
5 ����
(1) ��������ˮѹ��Һѹ����ϵͳ����ѧģ�Ͳ������˺�����ͨ����˲�为�ص��ⲿ���ŵĴ�����ʽ����������ڹ�ҵ�ֳ��Ļ��ھ�ȷ���Ի��ͱ�ṹ���Ƶĸ��Ͽ��Ʋ��ԡ�
(2) �Ӷ�˲�为�ؿ��Ƶ��ȶ��Է��濼�ǣ���ͳ��PID���Ʋ�����ã���ȷ���Ի����Ʋ���������PID����̬����Ӱ���ֵ�ת�����ȡ�
(3) ���ھ�ȷ���Ի��ͱ�ṹ�ĸ��Ͽ��Ʋ��Ա�PID���ƺ;�ȷ���Ի������и��õ�ͻ���غ��������ã�ϵͳ��̬���С������ϵͳ��³���ԺͿ��ƾ��ȵõ���������ߡ�
�ο����ף�
[1] Ҧ��, ���鶫, ������, ��. 50 MN���ɶ���ˮѹ����Һ�ŷ�����ϵͳ�������Է���[J]. ������Һѹ, 2006(8): 101-104.
YAO Jing, KONG Xiangdong, SHAN Dongsheng, et al. The electro-hydraulic servo control system load characteristic analysis of 50MN water press for free forging[J]. Machine Tool and Hydraulics, 2006(8): 101-104.
[2] ̷��ƽ, �Ƴ���, ����, ��. ˲���غ��¾���ˮѹ��Һѹ�������Ʋ���[J]. ��е����ѧ��, 2008, 44(11): 272-277.
TAN Jianping, HUANG Changzheng, LIU Bing, et al. Control strategy of hydraulic operation system under the transient load in giant hydrulic press[J]. Chinese Journal of Mechanical Engineering, 2008, 44(11): 272-277.
[3] ������, ��ҫ��, ������. ������ģ��ˮѹ���ĵ�Һ�ŷ�����ϵͳ[J]. ��ѹ��е, 2002(4): 13-17.
GUO Yuxi, DING Yaolin, LUO Shangyin. Electro�Chydraulic servo-control system for large hydraulic press for hot die forging[J]. Metal Forging Machinery, 2002(4): 13-17.
[4] �Ƴ���. 300 MNģ��ˮѹ�����������ٶ���Ӧ���Լ��ٶȿ����о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2007: 58-114.
HUANG Changzheng. Research on dynamic response characteristic and speed control of moving beam drive system for 300 MN die forging hydraulic press[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2007: 58-114.
[5] Mark K, Nariman S��On quantitative feed back design for robust position control of hydraulic actuators[J]. Control Engineering Practice, 2010(18): 289-299.
[6] Vladimir M, Zeljko S, Mario E. Robust position control synthesis of an electro-hydraulic servo system[J]. Isa Transactions, 2010(49): 535-543.
[7] Ali S, Hadi S, Kamyar G, et al. Identification and real-time position control of a servo-hydraulic rotary actuator by means of a neurobiologically motivated algorithm[J]. Isa Transactions, 2012(51): 208-219.
[8] Loukianov G, Sanchez E, Lizalde C. Force tracking neural block control for an electro-hydraulic actuator via second-order sliding mode[J]. Int J Robust Nonlin, 2008, 18(3): 319-332.
[9] �����, ��ʥ��, ��һ��. ���طǶԳƸ�����ϵͳ�߾���λ�ø���³�������о�[J]. �й���е����, 2007, 18(23): 2801-2805.
YANG Junhong, LI Shengyi, DAI Yifan. Research on high performance position tracking robust control strategy of a vave controled asymmetric nonlinear system[J]. China Mechanical Engineering, 2007, 18(23): 2801-2805.
[10] �ۿ���, ������, �Ӣ, �ȣ���Һλ���ŷ�ϵͳ�Ĺ�����У��ģ��PID ������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2010, 41(3): 960-965.
SHAO Junpeng, WANG Zhongwen, LI Jianying, et al. Rule self-tunning fuzzy-PID controller of electro�Chydraulic position servo system[J]. Journal of Central South University (Science and Technology), 2010, 41(3): 960-965.
[11] ���˻�, ���ﰲ, ��͢��, ��. Һѹ�ŷ�ϵͳ�ķ������Ż����[J]. ������Һѹ, 1994(5): 255-260.
LI Yunhua, WANG Sunan, LIN Tingxi, et al. nonlinear control system optimization and design of hydraulic servo system[J]. Machine Tool and Hydraulics, 1994(5): 255-260.
[12] Roger F, Atul K. Robust control design for a wheel loader using H�� and feedback linearization based methods[J]. ISA Transactions, 2009(48): 312-320.
[13] ������, ׯ����. ����ṹ�������ۼ�Ӧ��[M]. ����: ������ҵ��ѧ������, 2008: 19-43.
HU Jianbo, ZHUANG Kaiyu. Theory and application of advanced sliding variable structure control[M]. Xi��an: Northwestern Polytechnical University Press, 2008: 19-43.
[14] GUAN Cheng, PAN Shuangxi. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters[J]. Control Engineering Practice, 2008, 16: 1275-1284.
[15] Liu Y, Handroos H. Sliding mode control for a class of hydraulic position servo[J]. Mechatronics, 1999, 9(1): 111-123.
[16] ����, ̷��ƽ. ����ģ��ˮѹ����ѹ������ˮ������������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 43(8): 2993-2999.
CHEN Hui, TAN Jianping. Opening force characteristic of water valve with high pressure and large flow capacity in large die forging hydraulic press[J]. Journal of Central South University (Science and Technology), 2012, 43(8): 2993-2999.
[17] Komsta J, Oijen V, Antoszkiewicz P. Integral sliding mode compensator for load pressure control of die-cushion cylinder drive[J]. Control Engineering Practice, 2011(12): 1-11.
[18] ��ռ��. ��������Һѹ�ŷ�����[M]. ����: �������պ����ѧ������, 2004: 16-50.
WANG Zhanlin. Modern electronic hydraulic servo control[M]. Beijing: Beihang University Press, 2004: 16-50.
(�༭ �Կ�)
�ո����ڣ�2013-05-15�������ڣ�2013-07-05
������Ŀ�����Ҹ����о���չ�ƻ�(��863���ƻ�)��Ŀ(2007AA04Z417)�����ߵ����ػ��������װ�������ҿƼ��ش�ר��(2009ZX04005-031)�����嶯�������ϵͳ�����ص�ʵ���ҿ�������������Ŀ(GZKF-201023)
ͨ�����ߣ�̷��ƽ(1963-)���У����������ˣ����ڣ���ʿ����ʦ�������ִ�����Һ���������뼼���о�,����ϵͳ״̬��������ϡ��������е������������ƣ��绰��13607311991��E-mail��jptan@163.com

