DOI: 10.11817/j.issn.1672-7207.2015.07.016
基于有限时间收敛ESO的四旋翼无人机控制
王世峰1, 2,赵党军3
(1. 华中科技大学 光学与电子信息学院,湖北 武汉,430074;
2. 湖南工业职业技术学院 电气工程系,湖南 长沙,410208;
3. 中南大学 航空航天学院,湖南 长沙,410083)
摘要:将四旋翼无人机运动分解为6个相互解耦的单输入-单输出(single-input-single-output,SISO)系统,针对各SISO系统中存在的外部扰动和未建模动态提出一种有限时间收敛的扩张状态观测器(finite-time convergent extended state observer,FTCESO),从系统量测输出中重构系统状态和广义扰动。在FTCESO驱动下,基于同伦方法设计具有扰动补偿的无人机位置和姿态控制系统,有效抑制了系统不确定性、气动未建模动态、外部持续和时变扰动。
关键词:四旋翼无人机;有限时间收敛;扩张状态观测器;同伦方法
中图分类号:TP13 文献标志码:A 文章编号:1672-7207(2015)07-2494-10
Quad-rotor vehicle control based on finite-time convergent ESO
WANG Shifeng1, 2, ZHAO Dangjun3
(1. School of Optical and Electronic Information, Huazhong University of Science & Technology, Wuhan 430074, China;
2. Department of Electrical Engineering, Hunan Industry Polytechnic, Changsha 410208, China;
3. School of Astronautics and Aeronautics, Central South University, Changsha 410083, China)
Abstract: The motion of a quad-rotor vehicle was decomposed into 6 decoupled single-input-single-output(SISO) systems. For disturbances and unmodeled dynamics existing in each SISO system, a finite-time convergent extended state observer (FTCESO) was proposed for the reconstruction of system states and generalized disturbances from measured output signals. Driven by FTCESOs, improved homogenous controllers with disturbance compensations for trajectory tracking and attitude stabilization were designed. Convincing simulations reveal that the proposed method can efficiently accommodate system uncertainties, unmodeled aerodynamics, sustained and time-varying external disturbances.
Key words: quad-rotor vehicle; finite-time convergent; extended state observer; homogeneous method
近年来,四旋翼无人机(quad-rotor vehicle,QRV)因其结构简单且具垂直起降能力而获得广泛关注[1]。QRV具有时变和非线性的特点,此外QRV受气动扰动、系统中参数不确定性以及不可避免的未建模动态影响,因此,QRV系统是一种本质不稳定的欠驱动机电系统。要实现QRV系统的高性能控制,必须采取一些强鲁棒性方法来有效抑制系统中各种不确定性和降低未建模动态的影响。传统上的QRV运动控制系统通常被分解为线运动和旋转运动2个子系统,分别设计相应的控制器从而达到轨迹跟踪和姿态稳定的目的:Bouabdallah等[2]分别采用精确线性化技术和动态逆方法设计了外环制导控制和内环姿态稳定控制系统;Zuo等[3]将传统的PID(proportional-integral-differential)方法用于轨迹跟踪控制以获得姿态角指令,并对该姿态角指令进行滤波,然后利用反演(back-stepping)控制技术获得了较好的姿态稳定控制效果;Raffo等[4]提出采用标准反演控制策略进行线运动控制,同时采用 方法设计了姿态稳定控制器,该方法能够较好地抑制外部扰动和参数不确定性的影响,但对姿态运动中的持续扰动无能为力。为克服这一缺陷,Raffo等[5]提出了一种预测控制/非线性控制集成控制策略,有效抑制了持续扰动。上述方法均将QRV控制分解为旋转运动控制和线运动控制2个子系统,整个飞行控制系统结构复杂,难以在实际飞控中实现,因此,近年来也出现了一些简洁的控制方案,如:Besnard等[6]利用滑模观测器驱动滑模控制器进行QRV飞行控制系统设计;Liu等[7]提出带干扰观测器的显式模型预测方法;另外诸如闭环最优控制[8]及智能控制技术[9]等都被用于QRV的飞行控制之中。尽管飞行仿真或工程实验已经证实这些方法行之有效,但它们对于系统精确模型的依赖,使设计过程中需要建立精确的气动模型,这对小型无人机而言成本会急剧增加。Wang等[10]在连续有限时间微分跟踪器的基础上,针对一类SISO系统利用超螺旋算法提出一种有限时间收敛的扩张状态观测器FTCESO,从系统输出中获得状态和广义扰动[11-12]的观测信息。为减少对精确模型的依赖,同时提高系统在存在各种不确定性扰动时的控制性能,本文作者提出一种基于FTCESO的同伦控制策略。在有限时间收敛的同伦控制器中引入扰动补偿,提高了系统抗扰动能力。
方法设计了姿态稳定控制器,该方法能够较好地抑制外部扰动和参数不确定性的影响,但对姿态运动中的持续扰动无能为力。为克服这一缺陷,Raffo等[5]提出了一种预测控制/非线性控制集成控制策略,有效抑制了持续扰动。上述方法均将QRV控制分解为旋转运动控制和线运动控制2个子系统,整个飞行控制系统结构复杂,难以在实际飞控中实现,因此,近年来也出现了一些简洁的控制方案,如:Besnard等[6]利用滑模观测器驱动滑模控制器进行QRV飞行控制系统设计;Liu等[7]提出带干扰观测器的显式模型预测方法;另外诸如闭环最优控制[8]及智能控制技术[9]等都被用于QRV的飞行控制之中。尽管飞行仿真或工程实验已经证实这些方法行之有效,但它们对于系统精确模型的依赖,使设计过程中需要建立精确的气动模型,这对小型无人机而言成本会急剧增加。Wang等[10]在连续有限时间微分跟踪器的基础上,针对一类SISO系统利用超螺旋算法提出一种有限时间收敛的扩张状态观测器FTCESO,从系统输出中获得状态和广义扰动[11-12]的观测信息。为减少对精确模型的依赖,同时提高系统在存在各种不确定性扰动时的控制性能,本文作者提出一种基于FTCESO的同伦控制策略。在有限时间收敛的同伦控制器中引入扰动补偿,提高了系统抗扰动能力。
1 预备知识
为了讨论简洁,定义 , 其中
, 其中 ,
, ,
, 为标准符号函数。若
为标准符号函数。若
 , 则
, 则
 。下面简要给出有关定义、引理和QRV模型描述及控制目标。
。下面简要给出有关定义、引理和QRV模型描述及控制目标。
1.1 定义和引理
定义1 (homogeneity[13-14]) 考虑如下非线性系统:

其中 在原点的开邻域U0上连续。若向量场
在原点的开邻域U0上连续。若向量场 对任意
对任意 >0有
>0有 (其中,i=1, …, n;r1, r2, …, rn称为伸缩因子族,k>-ri,min(i=1, …, n),则该向量场f是k度同伦的(homogenous)。若f是同伦的,则非线性系统(式)是同伦的。
(其中,i=1, …, n;r1, r2, …, rn称为伸缩因子族,k>-ri,min(i=1, …, n),则该向量场f是k度同伦的(homogenous)。若f是同伦的,则非线性系统(式)是同伦的。
引理1 [15] 若非线性系统(式)对伸缩因子族(r1, r2, …, rn)是k度同伦的,且 有渐近稳定平衡点
有渐近稳定平衡点 , 则系统是全局有限时间稳定的。
, 则系统是全局有限时间稳定的。
引理2 [14] 考虑非线性系统(式),若存在连续正定函数
 使
使

成立(其中c>0, ,
, 是位于原点的开邻域),则原点是非线性系统(式)的有限时间稳定平衡点。调节时间T满足
是位于原点的开邻域),则原点是非线性系统(式)的有限时间稳定平衡点。调节时间T满足
若 ,V正则,且在
,V正则,且在 上
上 <0成立,则原点是非线性系统(式)的全局有限时间稳定平衡点。
<0成立,则原点是非线性系统(式)的全局有限时间稳定平衡点。
1.2 QRV数学模型
本文重点讨论如图1所示的小型QRV的飞行控制问题。为描述QRV的刚体运动方程,定义惯性坐标系Oxyz和机体坐标系O1x1y1z1,其中O1x1指向飞行方向,O1y1在机体水平面内垂直于O1x1,O1z1垂直于x1O1y1平面指向上方。QRV的姿态角由欧拉角 ,
, 和
和 表示,分别代表滚转角、俯仰角和偏航角。由机体坐标系到惯性坐标系的旋转矩阵定义为
表示,分别代表滚转角、俯仰角和偏航角。由机体坐标系到惯性坐标系的旋转矩阵定义为

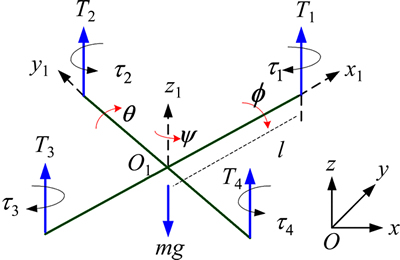
图1 QRV结构与坐标系定义
Fig. 1 QRV structure and reference frame definition
其中: ;
; 。本文中QRV姿态角均限定在
。本文中QRV姿态角均限定在 ,避免了欧拉角的奇异现象。
,避免了欧拉角的奇异现象。
令 表示QRV质心在Oxyz中的位置矢量,
表示QRV质心在Oxyz中的位置矢量, 表示姿态向量,
表示姿态向量, 表示QRV在机体坐标系中的旋转角速度。QRV在惯性坐标系中的线运动方程为
表示QRV在机体坐标系中的旋转角速度。QRV在惯性坐标系中的线运动方程为

式中:m为QRV质量;g为当地重力加速度; 为机体坐标系中沿
为机体坐标系中沿 方向的总推力;
方向的总推力; 和
和 分别为气动扰动和外部扰动。
分别为气动扰动和外部扰动。
QRV刚体旋转动力学方程为

其中:J为惯性张量矩阵; 是由4个旋翼提供的控制力矩;
是由4个旋翼提供的控制力矩; 和MD分别为气动力矩和外部扰动力矩,
和MD分别为气动力矩和外部扰动力矩, 。另外姿态运动学方程可以根据坐标变换矩阵推导获得,即
。另外姿态运动学方程可以根据坐标变换矩阵推导获得,即

其中:
结合式~,QRV运动可以用如下标量方程来描述:
其中: ,
, 和
和 为气动阻力系数;
为气动阻力系数; ,
, 和
和 为气动阻尼力矩系数。这些系数通常需要通过风洞试验获得,但很多时候并没有风洞试验条件。尽管文献[16]给出了一种简单的气动建模方法,但耗时的实验过程仍然会增加系统设计成本,因此,急需一种强鲁棒性方法在不需要气动建模情况下实现QRV的高性能控制。在气动参数未知并存在持续扰动和时变扰动情况下,以较低成本实现无人机高性能飞行控制,使无人机能够精确跟踪事先给定的飞行轨迹。
为气动阻尼力矩系数。这些系数通常需要通过风洞试验获得,但很多时候并没有风洞试验条件。尽管文献[16]给出了一种简单的气动建模方法,但耗时的实验过程仍然会增加系统设计成本,因此,急需一种强鲁棒性方法在不需要气动建模情况下实现QRV的高性能控制。在气动参数未知并存在持续扰动和时变扰动情况下,以较低成本实现无人机高性能飞行控制,使无人机能够精确跟踪事先给定的飞行轨迹。
2 基于FTCESO的同伦控制
为实现QRV的飞行控制,首先考虑如下具有外部扰动的SISO系统:
其中: 为控制输入;为不确定外部扰动;y为量测输出;
为控制输入;为不确定外部扰动;y为量测输出; 为未知系统函数。假设状态x2不可直接测量,则全状态反馈控制器难以实现。此外,SISO系统(式)中未建模动态和外部扰动也给控制系统设计带来了挑战。定义时间映射函数
为未知系统函数。假设状态x2不可直接测量,则全状态反馈控制器难以实现。此外,SISO系统(式)中未建模动态和外部扰动也给控制系统设计带来了挑战。定义时间映射函数 ,即
,即 ,将其定义为广义扰动。
,将其定义为广义扰动。
假设1[16]:对SISO系统(式)的任意可行解,广义扰动L(t)一致有界,且其对时间的导数有界,即 。
。
2.1 FTCESO
扩张状态观测器(ESO)技术由韩京清首先提 出[17],是其自抗扰控制理论的基础。标准ESO具有如下形式:
设计合适的参数 和函数
和函数 ,可以使观测器状态
,可以使观测器状态 逼近SISO系统(式)的状态
逼近SISO系统(式)的状态 ,扩展状态
,扩展状态 可以构成对广义扰动
可以构成对广义扰动 的估计。本文根据文献[10]中给出的超螺旋算法提出一种有限时间收敛的扩张状态观测器(FTCESO):
的估计。本文根据文献[10]中给出的超螺旋算法提出一种有限时间收敛的扩张状态观测器(FTCESO):
SISO系统(式)可以改写为

其中:扩展状态 满足假设1。令
满足假设1。令 ,则得到误差系统为
,则得到误差系统为
定理1 对有限时间收敛扩张状态观测器,若SISO系统(式)满足假设1,则存在常数k1,k2和k3 (k1>0,k2>0,k3>0),ts>0以及0< <1使
<1使
在有限时间ts内满足。其中: 表示
表示 的奇异值;
的奇异值; ,
, ,且
,且
 ,
,

选择合适参数k1,k2和k3使
 ,从而使得观测器误差
,从而使得观测器误差 在有限时间内变得充分小。
在有限时间内变得充分小。
证明 构造强鲁棒性Lyapunov函数

容易证实
显然,除 外,
外, 处处连续且可微,此外,在到达系统原点以前,误差系统(式(13))不可能停留在处。因此,在之外,可以按照常规方法求取。因
处处连续且可微,此外,在到达系统原点以前,误差系统(式(13))不可能停留在处。因此,在之外,可以按照常规方法求取。因

故


其中: >0;
>0; >0。状态相关矩阵
>0。状态相关矩阵 的特征方程可以记作
的特征方程可以记作 。若ki>0且
。若ki>0且 (
( >0), 则多项式G(s)是Hurwitz的(系数均为正),即状态相关矩阵A是稳定的,将对时间取微分有
>0), 则多项式G(s)是Hurwitz的(系数均为正),即状态相关矩阵A是稳定的,将对时间取微分有



其中: ,记
,记 。由于矩阵是逐点Hurwitz的,因此,必然存在1个正定矩阵Q使Lyapunov方程有解P存在:
。由于矩阵是逐点Hurwitz的,因此,必然存在1个正定矩阵Q使Lyapunov方程有解P存在:
 ,
, >0
>0
由式得

其中: ;
; 表示的特征值。由于
表示的特征值。由于 ,因此,有
,因此,有


对于正定矩阵Q有不等式
 成立。注意到
成立。注意到 且A和P在时非奇异,因此有
且A和P在时非奇异,因此有

这里状态相关矩阵A可以写为


对非奇异矩阵A有

由于A1为对角阵,且为 的非负减函数,故
的非负减函数,故

因此,若 >1,则>1,且有
>1,则>1,且有

则有如下不等式成立:




选择合适的参数k1,k2和k3使 >0,即
>0,即 >
> ,此时<0必然成立。结合式,和有
,此时<0必然成立。结合式,和有

根据引理2,误差系统(式(13))在有限时间

收敛至区域 ,即系统(式(13))必然在有限时间
,即系统(式(13))必然在有限时间 满足
满足 。一旦,则有,于是,
。一旦,则有,于是, 成立。进一步得到如下不等式:
成立。进一步得到如下不等式:


若不等式

成立,则有
 >0和<0成立。与式和类似可以得到
>0和<0成立。与式和类似可以得到


于是, 为时间的减函数,并在有限时间
为时间的减函数,并在有限时间 内进入区域:
内进入区域:
显然,若选择合适的参数使得 充分大,则观测器误差会在有限时间内充分小。
充分大,则观测器误差会在有限时间内充分小。
2.2 控制律
本文在文献[13]所提同伦控制方法的基础上,基于FTCESO所获得的广义扰动估计,引入扰动补偿,提高了控制器对模型不确定性的抑制能力。
定理2 要使SISO系统(式(9))输出跟踪参考输出yr,设yr具有有界的一阶和二阶导数,若控制律设计为

其中: >0;
>0; >0;
>0; 和
和 为设计参数;
为设计参数; 由FTCESO(式(11))提供。则闭环系统在有限时间
由FTCESO(式(11))提供。则闭环系统在有限时间 内收敛至包含原点的充分小区域内,即跟踪误差
内收敛至包含原点的充分小区域内,即跟踪误差 ,
, 。
。
证明:将控制律(式(36))代入式得


其中: ;
; 和
和 是观测器(式(11))的输出。由定理1知观测误差在有限时间
是观测器(式(11))的输出。由定理1知观测误差在有限时间 内满足
内满足 。注意到
。注意到 ,
, ,
, ,
, ,因此,一旦
,因此,一旦 >,式可以改写为
>,式可以改写为

其中: ;
; ;
; 。若令
。若令 ,
, ,则
,则 。根据误差系统(式(13)),闭环系统(式(38))可以改写为
。根据误差系统(式(13)),闭环系统(式(38))可以改写为
其中 可以看作扰动项。由式知
可以看作扰动项。由式知

 。
。
接下来验证标称系统有限时间稳定。
 ,
,
构造Lyapunov函数:
由于 ,故V1沿标称系统(式(40))对时间求导得
,故V1沿标称系统(式(40))对时间求导得


这表明标称系统(式(40))是Lyapunov稳定的。V1为不增函数, ,即
,即 和
和 在t>0时是有界的,因此,
在t>0时是有界的,因此, 对
对 是一致连续的;同时,对时间t也是一致连续的,因此,
是一致连续的;同时,对时间t也是一致连续的,因此, 也是一致连续(具体证明见文献[13]的附录A)。根据Barbalat引理有
也是一致连续(具体证明见文献[13]的附录A)。根据Barbalat引理有 ,即当
,即当 时
时 。
。
考虑 项,对其沿标称系统(式(40))取微分得
项,对其沿标称系统(式(40))取微分得

注意到式中的和总是有界,令 ,
, 。因此,
。因此, 有界,即
有界,即 一致连续。由于
一致连续。由于 ,因此,
,因此, 。根据文献[13]中引理2有
。根据文献[13]中引理2有 ,这表明
,这表明 。结合Lyapunov稳定性定理,标称系统(式(40))是全局渐近稳定的。
。结合Lyapunov稳定性定理,标称系统(式(40))是全局渐近稳定的。
根据定义1容易验证标称系统(式(40))对伸缩因子 是
是 <0同伦的。根据引理1知,标称系统(式(40))在有限时间内收敛至原点
<0同伦的。根据引理1知,标称系统(式(40))在有限时间内收敛至原点 。
。
下面说明扰动系统(式(39))的收敛性。令 ,则扰动系统(式(39))可以写为
,则扰动系统(式(39))可以写为

其中:
若 ,则矩阵
,则矩阵 在除
在除 外是逐点Hurwitz的,因此有[18]
外是逐点Hurwitz的,因此有[18]
由于标称系统(式(40))是全局有限时间收敛的,因此, 必然在有限时间进入
必然在有限时间进入 ;之后由于
;之后由于 和
和 分别是和的减函数,
分别是和的减函数, 逐渐增加,于是收敛域半径r进一步减小,因此,会在有限时间内收敛至一个很小的区域。若和足够大,则该半径足够小,即
逐渐增加,于是收敛域半径r进一步减小,因此,会在有限时间内收敛至一个很小的区域。若和足够大,则该半径足够小,即 会足够小,于是,跟踪误差在有限时间内满足
会足够小,于是,跟踪误差在有限时间内满足

 。证毕。
。证毕。
若 ,则控制器(式(36))退化为带有前馈补偿的PD控制器。下面对此类控制器和本文所提改进的同伦控制器进行对比。
,则控制器(式(36))退化为带有前馈补偿的PD控制器。下面对此类控制器和本文所提改进的同伦控制器进行对比。
3 基于FTCESO的QRV控制
为将前面所提的控制方案应用至小型QRV的控制之中,需要通过构造虚拟输入将QRV运动方程(式(8))分解为一系列解耦二阶系统。QRV控制系统包括外环轨迹跟踪控制和内环姿态稳定控制2个部分。整体控制系统结构框图如图2所示,其中参考轨迹 和
和 及其一阶和二阶微分信号由轨迹规划算法离线产生。
及其一阶和二阶微分信号由轨迹规划算法离线产生。
3.1 轨迹跟踪控制
为方便设计,改写QRV运动方程(式(8))中线运动部分为
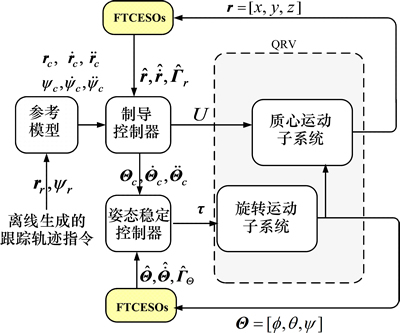
图2 基于FTCESO的QRV控制系统结构
Fig. 2 Structure of QRV control system based on FTCESO


其中:
 ;
;
虚拟控制u的引入使式成为1个解耦系统。显然,在QRV的任意可行飞行包线内,时间映射函数(即广义扰动)  是有界的,且满足假设1。因此,对每个解耦后的SISO系统可以设计FTCESO如下:
是有界的,且满足假设1。因此,对每个解耦后的SISO系统可以设计FTCESO如下:
其中: ;观测器输入
;观测器输入 。由定理1可知:观测信号在有限时间内,位置观测量
。由定理1可知:观测信号在有限时间内,位置观测量 ,速度观测量
,速度观测量 ,广义扰动观测量
,广义扰动观测量 。令
。令
 ,
,
 ,
, ,则根据定理2设计控制律为
,则根据定理2设计控制律为

其中 和
和 为对角增益矩阵。注意到QRV总的推力
为对角增益矩阵。注意到QRV总的推力 总是有限的,因此,需要对控制输入进行饱和处理,即
总是有限的,因此,需要对控制输入进行饱和处理,即 。在获得总推力后,外环控制系统按下式给出指令俯仰角和滚转角:
。在获得总推力后,外环控制系统按下式给出指令俯仰角和滚转角:
 ;
;
3.2 姿态稳定控制
与式类似,改写姿态运动方程为

其中:

相应地,3个独立的FTCESO设计为

其中:下标 ;
; 。同样,在有限时间内,姿态角观测量
。同样,在有限时间内,姿态角观测量 ,姿态角速度观测量,广义扰动观测量
,姿态角速度观测量,广义扰动观测量 。
。
令 ,
,
 和
和 ,则控制律为
,则控制律为

其中: 和
和 为对角增益矩阵。
为对角增益矩阵。 和
和 可以采用有限差分方式获得,同样也可以使用观测器(式(11))获得。
可以采用有限差分方式获得,同样也可以使用观测器(式(11))获得。
4 仿真实验
仿真实验针对精确模型(式(8))进行,仿真中考虑了气动扰动、外部扰动和参数扰动。采用4阶龙格-库塔算法求解精确模型(式(8)),步长为0.005 s。QRV各系统参数见表1。
表1 QRV模型参数
Table 1 Parameters of QRV model

参考轨迹 和
和 通过三阶滤波器
通过三阶滤波器 得到平滑指令信号及其一阶和二阶微分信号,其中p=10,
得到平滑指令信号及其一阶和二阶微分信号,其中p=10, ,
, 。QRV初始状态设为
。QRV初始状态设为 m,
m, rad。外部非匹配扰动包括持续扰动和时变扰动:
rad。外部非匹配扰动包括持续扰动和时变扰动: (t>5 s),
(t>5 s),
 (t>10 s),
(t>10 s), (t> 15 s),
(t> 15 s), (t>20 s),
(t>20 s), (t>25 s),
(t>25 s), N・m (t>30 s)。
N・m (t>30 s)。
FTCESO(式)和式参数一致,设置为k1=25,k2=840,k3=950, 。轨迹跟踪控制器(式(48))中参数:
。轨迹跟踪控制器(式(48))中参数: ,
, ,
,
 推力上限
推力上限 N。姿态控制器(式(52))中参数设置为:,
N。姿态控制器(式(52))中参数设置为:,
 ,
, 。
。
仿真考虑跟踪三维空间中的圆轨迹,即
 ;
; ;
;
 ;
; rad
rad
为表明本文所提方法的鲁棒性,质量m和转动惯量Jx,Jy和Jz分别引入 的参数摄动。
的参数摄动。
图3所示为标称情况和参数摄动情况下QRV跟踪给定轨迹在三维空间中的运行轨线,图4所示为位置跟踪误差曲线。从图4可见:位置跟踪误差迅速减小至0 m附近,即使在有扰动存在下也能迅速收敛。图5所示为由外环制导控制器所产生的姿态角指令和实际飞行姿态曲线,图6所示为在有参数摄动和外部扰动情况下的姿态角跟踪误差曲线。从图5和图6可见: 3个通道的姿态误差均不超过0.2 rad,并且在稳定后,误差能迅速收敛至0 m附近。图7和图8所示分别为标称情况下QRV总推力曲线和3个通道的控制力矩曲线,显然需要的推力和力矩均满足QRV动力系统实际约束条件。仿真实验结果表明本文所提方法行之有效。
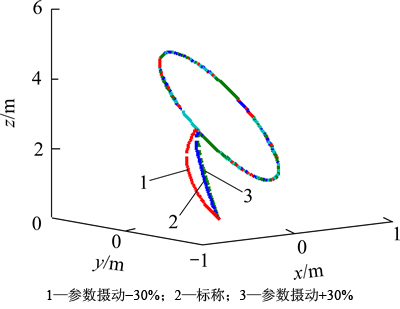
图3 QRV三维轨迹
Fig. 3 3-dimensional trajectory of QRV
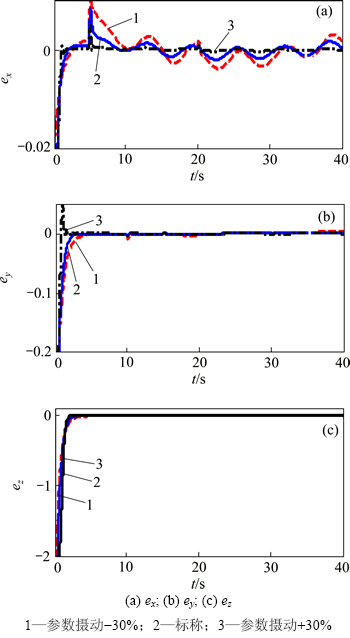
图4 位置跟踪误差曲线
Fig. 4 Curves of tracking error position

图5 姿态角曲线图
Fig. 5 Curves of attitude
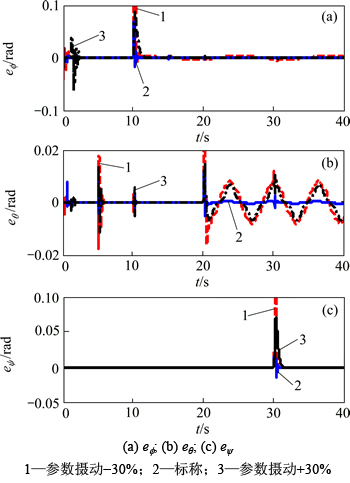
图6 姿态角跟踪误差曲线
Fig. 6 Curves of attitude tracking error
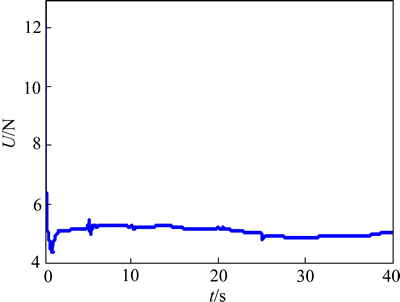
图7 标称情况下总推力曲线
Fig. 7 Curve of thrust in normal case
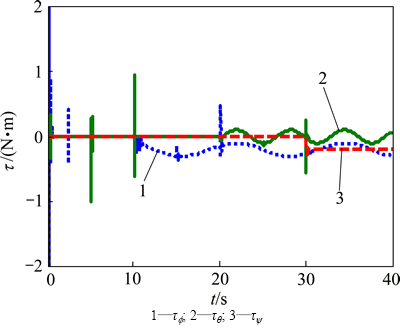
图8 标称情况下控制力矩曲线
Fig. 8 Curves of control torques in normal case
5 结论
1) 对于存在未建模动态和外部扰动以及参数摄动的SISO系统,采用FTCESO从输出中重构系统状态和广义扰动可行,其中广义扰动包含系统各种不确定性。在对系统状态和扰动观测的基础上,设计带有扰动补偿的同伦控制器,使系统输出能快速跟踪指令信号,且跟踪误差能在有限时间内收敛至包含原点的小邻域内。
2) 在QRV气动参数未知且有外部扰动和参数摄动情况下,通过引入虚拟控制量,将QRV运动方程分解为6个独立的SISO系统,利用FTCESO技术从系统输出和量测输出中获得系统状态和广义扰动的估计。在FTCESO驱动下,同伦控制器能使系统保持姿态稳定,同时跟踪给定的飞行轨线。本文所提方法能够有效抑制未建模动态、外部扰动和参数摄动所带来的影响,且制导控制器和姿态稳定控制器具有相同结构,简化了控制系统设计。
参考文献:
[1] 宋英麟, 鲜斌, 茹滨超, 等. 无人机微型姿态航向系统数据处理[J]. 中南大学学报(自然科学版), 2013, 44(Suppl 2): 89-93.
SONG Yinglin, XIAN Bin, RU Binchao, et al. Micro attitude and heading reference system for unmanned aerial vehicles[J]. Journal of Central South University (Science and Technology), 2013, 44(Suppl 2): 89-93.
[2] Bouabdallah S, Murrieri P, Siegwart R. Design and control of an indoor micro quadrotor[C]// IEEE International Conference on Robotic and Automation. Piscataway, USA, 2004: 4393-4398.
[3] ZUO Zongyu. Trajectory tracking control design with command- filtered compensation for a quadrotor[J]. IET Control Theory and Applications, 2010, 4(11): 2343-2355.
[4] Raffo G V, Ortega M G, Rubio F R. Backstepping/nonlinear H∞ control for path tracking of a quadrotor unmanned aerial vehicle[C]// Proceedings of the American Control Conference. Piscataway, USA, 2008: 3356-3361.
[5] Raffo G V, Ortega M G, Rubio F R. An integral predictive/nonlinear H-infty control structure for a quadrotor helicopter[J]. Automatica, 2010, 46(1): 29-39.
[6] Besnard L, Shtessel Y B, Landrum B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer[J]. Journal of the Franklin Institute, 2012, 349(2): 658-684.
[7] LIU Cunjia, CHEN Wenhua, Andrews J. Tracking control of small-scale helicopters using explicit nonlinear MPC augmented with disturbance observers[J]. Control Engineering Practice, 2012, 20(3): 258-268.
[8] Karpenko M, Sekhavat P, Park J, et al. Closed-loop optimal guidance and control of quadrotor unmanned aerial vehicle[C]// AIAA Guidance Navigation and Control Conference. Reston, USA, 2010: 1-11.
[9] Purwin O, D’Andrea R. Performing and extending aggressive maneuvers using iterative learning control[J]. Robotics and Autonomous Systems, 2011, 59(1): 1-11.
[10] WANG Xinhua, LIN Hai. Design and frequency analysis of continuous finite-time-convergent differentiator[J]. Aerospace Science and Technology, 2012, 18(1): 69-78.
[11] ZHAO Dangjun, WANG Yongji, LIU Lei. Robust fault-tolerant control of launch vehicle via GPI observer and integral sliding mode control[J]. Asian Journal of Control, 2013, 15(2): 614-623.
[12] ZHAO Dangjun, JIANG Bingyan. Adaptive fault-tolerant control of heavy lift launch vehicle via differential algebraic observer[J]. Journal of Central South University, 2013, 20(8): 2142-2150.
[13] DU Haibo, LI Shihua. Finite-time attitude stabilization for a spacecraft using homogeneous method[J]. Journal of Guidance, Control and Dynamics, 2012, 35(3):740-748.
[14] Bhat S P, Bemstein D S. Finite-time stability of continuous autonomous systems[J]. SIAM Journal on Control Optimization, 2000, 38(3): 751-766.
[15] Bhat S P, Bemstein D S. Finite-time stability of homogeneous systems[C]// Proceedings of the American Control Conference. Piscataway, USA, 1997: 2513-2514.
[16] Hoffmann G M, Huang H, Waslander S L, et al. Quadrotor helicopter flight dynamics and control: Theory and experiment[C]// AIAA Guidance Navigation and Control Conference 2007. Reston, USA, 2007: 1670-1689.
[17] HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[18] Lewis F, Jagannathan S, Yesildirek A. Neural network control of robot manipulators and nonlinear systems[M]. London: Taylor and Francis, 1999: 277-304.
(编辑 刘锦伟)
收稿日期:2014-07-23;修回日期:2014-10-02
基金项目(Foundation item):湖南省自然科学基金资助项目(14JJ3024) (Project(14JJ3024) supported by the Natural Science Foundation of Hunan Province)
通信作者:赵党军,博士,讲师,从事飞行器制导与控制研究;E-mail: zhao_dj@csu.edu.cn

