基于相对运动理论的高温铁水运输车
侧倾运动建模与特征分析
张卫东1, 2,李向华1,邓华1
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 长沙凯瑞重工机械有限公司,湖南 长沙,410013)
摘要:根据牛顿定律的相对运动理论,考虑重载高温铁水运输车车身阻尼以及惯性积较大的情况,建立该车的整车动力学模型,对模型进行计算和数值仿真。研究结果表明:大的惯性积使得高温铁水运输车侧倾振动的振动频率增大了约10%,振幅减小了约5%,而转向半径和轴间间距对侧倾振动的影响很小。
关键词:高温铁水运输车;惯性积;侧倾运动;建模
中图分类号:U467 文献标志码:A 文章编号:1672-7207(2011)11-3347-05
Modeling and analysis of roll motion for high temperature ladle carrier vehicles based on relative motion theory
ZHANG Wei-dong1, 2, LI Xiang-hua1, DENG Hua1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. Changsha Kairui Heavy Industry Machinery Co. Ltd., Changsha 410013, China)
Abstract: Based on the Newton’s Law of relative motion, the model of a high temperature ladle carrier vehicle was built while the body’s products of inertia were taken into account. Model calculation and numeric simulations were made. The results show that the frequency of the roll vibration increases by about 10% while the amplitude decreases by about 5%. The turning radius and shaft distances have little effect on the roll motion.
Key words: high temperature ladle carrier; products of inertia; roll motion; modeling
高温铁水运输车是现代钢铁企业无轨运输的重要设备,其主要功能是将液态高温铁水运往炼钢工艺车间。高温铁水运输车转向角较大,在转弯和有一定坡度的路面上行驶时,会出现车身的侧倾运动,从而造成铁水罐晃动,轻者可能溢出高温铁水,重者可能造成铁水罐倾翻,产生重大安全事故。为保证行驶安全,高温铁水运输车满载时速度较低,一般不高于10 km/h;转弯半径也较大,导致运输效率较低。因此,如何确保高温铁水运输车运行安全而且高效,成为一个亟待解决的重要问题。目前,国内外对高温铁水运输车的研究较少,且集中于结构设计和强度设计方 面[1-2],而对运输安全性的研究较少。高温铁水运输车的特征与普通汽车的特征相比有较大的差异,一个突出的不同点是惯性积较大,不能像普通汽车一样将惯性积忽略不计。如某180 t高温铁水运输车在满载时的主转动惯量为1.02×106 kg・m2,而其惯性积为1.80× 106 kg・m2,比主转动惯量还要大,因此,高温铁水运输车的侧倾运动与一般汽车的侧倾运动存在本质差别。对普通汽车的侧倾运动问题,一般采用牛顿定律或者拉格朗日方程建立车辆的力学模型进行研究[3-14],但已有的研究主要集中于普通汽车的操纵稳定性方面。虽然Pacejka[15]推导了针对广义速度项而且没有包含阻尼的特殊形式的拉格朗日方程,此后喻凡等[16]将该特殊方程予以应用,但是,考虑到高温铁水运输车的惯性积较大的特点,特殊形式的拉格朗日方程并不能采用,已有的模型也不能直接应用。因为侧倾运动是一个车身与悬挂(包括车轮)的相对运动,为此,本文作者根据相对运动的有关理论[17],同时考虑重载高温铁水运输车车身阻尼以及惯性积,建立整车力学模型。利用该模型,研究高温铁水运输车的侧倾运动,以便为提高其安全性提供理论依据。
1 高温铁水运输车的动力学模型
高温铁水运输车在整体结构上可分为以下几大部分:(1) 敞开的高温铁水罐与车身(统称为车身);(2) 车架系统(简称车架),该系统提供高温铁水的储存空间和铁水罐的姿态调整;(3) 液压悬挂系统;(4) 行走系统,为四桥八组合轮系统,每个组合轮系统由4个实心轮胎组成。图1所示为整车结构简图。
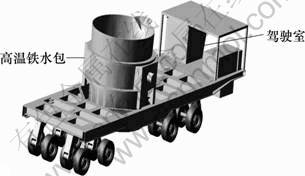
图1 高温铁水运输车
Fig.1 High temperature ladle carrier vehicle
1.1 车身坐标系及自由度
下面建立高温铁水运输车的动力学模型。考虑车身的4个自由度,即2个平动和2个转动,坐标系如图2所示,分别为固定在地面的坐标系O-XYZ和固定在车架的坐标系O-xyz,其原点O为未发生侧倾时车身质心C的铅垂线与侧倾中心线的交点。假设车身只有围绕侧倾中心轴转动的侧倾运动这1个自由度(侧倾角为 ),由于液压悬架系统的作用,车架系统(包含所有车轮组成)的垂向运动、俯仰运动和翻滚运动很小,这些运动在建模中不予考虑,因而车身只具有向前的车速u、侧向车速v和横摆速度r 3个自由度。所有角度以离开原始位置并满足右手坐标系的方向为正方向,4个自由度如图3所示。下面根据牛顿定律建立有关动力学方程式。有关变量的表示方法说明如下:(1) 作为各物理量的第1个下标指车轴排号,自驾驶室往后,各车轴的排号从1到4逐渐增加;(2) 作为各物理量的第2个下标指车轮左右排号,1代表左(外)轮,2代表右(内)轮。考虑到在车辆坐标系中,车辆的转动惯量矩阵为一常数,因此,首先求出车辆坐标系的线动量和角动量,然后,通过非惯性系(车辆坐标系)向惯性系(地面坐标系)进行转换。
),由于液压悬架系统的作用,车架系统(包含所有车轮组成)的垂向运动、俯仰运动和翻滚运动很小,这些运动在建模中不予考虑,因而车身只具有向前的车速u、侧向车速v和横摆速度r 3个自由度。所有角度以离开原始位置并满足右手坐标系的方向为正方向,4个自由度如图3所示。下面根据牛顿定律建立有关动力学方程式。有关变量的表示方法说明如下:(1) 作为各物理量的第1个下标指车轴排号,自驾驶室往后,各车轴的排号从1到4逐渐增加;(2) 作为各物理量的第2个下标指车轮左右排号,1代表左(外)轮,2代表右(内)轮。考虑到在车辆坐标系中,车辆的转动惯量矩阵为一常数,因此,首先求出车辆坐标系的线动量和角动量,然后,通过非惯性系(车辆坐标系)向惯性系(地面坐标系)进行转换。

图2 固定坐标系和车辆坐标系
Fig.2 Absolute coordinates and vehicular coordinates
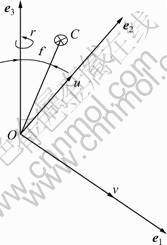
图3 自由度示意图
Fig.3 Sketch of freedoms
1.2 线动量
车身质心处的平动速度在3个坐标轴上的分量为: ;
; ;
;
 (其中:hb为未发生侧倾时簧载质量质心到侧倾中心的距离)。因此,车身的线动量可以由车辆坐标系的3个基矢e1(y向)、e2 (x向)和e3(z向)表示如下(见图3)。
(其中:hb为未发生侧倾时簧载质量质心到侧倾中心的距离)。因此,车身的线动量可以由车辆坐标系的3个基矢e1(y向)、e2 (x向)和e3(z向)表示如下(见图3)。


对于车架系统,其线动量为:
式中:m为簧载质量;mi为各车桥质量;li为各车轴到质心C的距离乘以1个系数,当该轴在质心前时该系数为1,在质心后时该系数为-1。因此,车辆的线动量为: 。根据牛顿定律的相对运动理
。根据牛顿定律的相对运动理
论,在地面坐标系中,有: 。式中:
。式中:
 为车辆坐标系相对于地面坐标系的转动矢量,即横摆速度r。
为车辆坐标系相对于地面坐标系的转动矢量,即横摆速度r。
1.3 角动量
车架的角动量为: 。相对于
。相对于
车架的角动量,车身的角动量计算较复杂。车身的转动由2部分组成:其一是自身绕侧倾中心轴的转动,它是一个相对转动;其二是对应的侧倾中心自身的转动,即横摆运动,它是一个牵连转动。因此,在车辆坐标系中,车身转动速度为: ;车身的角动量为:
;车身的角动量为: 。其中,I 为惯量矩阵,
。其中,I 为惯量矩阵,
因此,车辆的角动量为: 。根据相对运动理论,在地面坐标系中,有:
。根据相对运动理论,在地面坐标系中,有:

1.4 侧倾运动微分方程
根据上述地面坐标系中的线动量和角动量方程,应用牛顿定律,得到车辆的侧倾运动微分方程:

 (1)
(1)

 (2)
(2)

 (3)
(3)

 (4)
(4)
式中:KB为侧倾刚度;CB为侧倾阻尼;Fxi1为第i轴内轮所受的纵向力;Fxi2为第i轴外轮所受的纵向力;Fyi1为第i轴内轮所受的侧向力;Fyi2为第i轴外轮所受的侧向力;Fa为车辆所受纵向阻力之和;LC为其作用点到C点的距离;hg为质心高度。式(1)~(4)即为根据相对运动理论建立的高温铁水运输车的侧倾运动 模型。
2 侧倾运动的特征及影响因素分析
2.1 侧倾运动的特征
下面以转向行驶为典型工况研究高温铁水运输车的侧倾运动。对于转向行驶,不失一般性,可以看作圆周行驶的一部分。在进行半径为R的圆周行驶时,不考虑纵向力以及由纵向力产生的相关力矩,式(1)~(4)可简化为如下运动微分方程:

 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
由式(5)~(8)可以看出:车辆的侧倾运动是一个存在耦合项的多自由度强非线性振动。更重要的是,在普通汽车中,由于I13与I23很小,式(8)中的 这一项永远是正数,而在高温铁水运输车中,由于I13大于I33,这一项永远为负值,这样,高温铁水运输车的侧倾运动性质与一般汽车的侧倾运动性质有本质的区别。此外,从式(7)和(8)可以看出:在将车速视为一个参数考虑时,侧倾角的运动只与横摆角速度运动耦合。由于转向速度的变化将引起非常复杂的非线性运动现象。
这一项永远是正数,而在高温铁水运输车中,由于I13大于I33,这一项永远为负值,这样,高温铁水运输车的侧倾运动性质与一般汽车的侧倾运动性质有本质的区别。此外,从式(7)和(8)可以看出:在将车速视为一个参数考虑时,侧倾角的运动只与横摆角速度运动耦合。由于转向速度的变化将引起非常复杂的非线性运动现象。
2.2 惯性积的影响
原车和假设惯性积为0的对比车的侧倾运动响应如图4 所示。由图4可知:侧倾运动是一个有阻尼的振动,由于高温铁水运输车车身的惯性积较大,加强了不同自由度之间的耦合,加快了侧倾运动的衰减,并使得侧倾运动的频率加快。初步计算表明,侧倾振动的频率增大了约10%,振幅减小了约5%;在同样的初始侧倾角激励下,考虑惯性积时计算得到的最大侧倾运动加速度大于没有考虑惯性积时的最大侧倾运动加速度。
2.3 轴距的影响
在进行线动量的计算时,li存在1个有正有负的系数,由于高温铁水运输车的各轴到质心的距离基本对称,因此,轴距对侧倾角振动的影响有限,数值仿真的结果表明确实如此。仿真计算的轴距数据如表1所示,仿真结果如图5所示。
2.4 转向半径的影响
以转向半径分别为20 m和40 m进行仿真计算,计算结果如图6所示。图6表明:转向半径对侧倾角振动的影响较小。

图4 侧倾角的时间历程
Fig.4 Responses of roll angle
表1 仿真所用轴距
Table 1 Shaft distances for simulation m


图5 不同轴距下侧倾角的时间历程
Fig.5 Responses of roll angle due to different shaft distances

图6 不同转向半径下侧倾角的时间历程
Fig.6 Response of roll angle due to different turning radius
3 结论
(1) 根据相对运动理论,建立了考虑惯性积情况下高温铁水运输车的整车力学模型。该模型表明:高温铁水运输车的侧倾运动性质与普通汽车的侧倾运动性质存在本质区别,且该区别是高温铁水运输车具有大的惯性积引起的。
(2) 由于高温铁水运输车具有较大的惯性积,其侧倾振动频率增大了约10%,侧倾振动的振幅减小了约5%;振动频率的增加对运输安全性产生了不利 影响。
(3) 改变转向半径与轴距对高温铁水运输车的侧倾角运动影响很小。
参考文献:
[1] 张卫东, 莫旭辉, 彭劲松. 铁水包车多轴转向机构运动学分析与优化[J]. 计算机仿真, 2008, 25(9): 268-271.
ZHANG Wei-dong, MO Xu-hui, PENG Jin-song. Analysis and optimal design of kinematics for multi-steering system of hydraulic conveyance vehicle[J]. Computer Simulation, 2008, 25(9): 268-271.
[2] 张卫东, 莫旭辉, 彭劲松. 基于ADAMS的液压平板铁水包车动力学仿真[J]. 专用汽车, 2007(10): 35-38.
ZHANG Wei-dong, MO Xu-hui, PENG Jin-song. Dynamic simulation about hydraulic conveyance vehicle based on ADAMS[J]. Special Purpose Vehicle, 2007(10): 35-38.
[3] Badjia B, Fenauxa E, El B M, et al. Nonlinear single track model analysis using Volterra series approach[J]. Vehicle System Dynamics, 2009, 47(1): 81-98.
[4] Yoon J, Kim D, Yi K. Design of a rollover index-based vehicle stability control scheme[J]. Vehicle System Dynamics, 2007, 45(5): 459-475.
[5] 殷国栋, 陈南. 4WS车辆μ综合鲁棒主动侧倾操纵性能控制[J]. 东南大学学报: 自然科学版, 2006, 36(3): 384-388.
YIN Gou-dong, CHEN Nan. Active roll μ synthesis robust control for 4WS vehicle steering performance[J]. Journal of Southeast University: Natural Science Edition, 2006, 36(3): 384-388.
[6] Sharp R S, Pan D. On the design of an active roll control system for a luxury car[J]. Proceedings of Institute of Mechanical Engineers: Part D. Journal of Automobile Engineering, 1993, 207(4): 275-284.
[7] 宗长富, 郭孔辉, 李铂. 汽车操纵稳定性的理论预测与综合评价[J]. 汽车工程, 2001, 23(1): 5-12.
ZONG Chang-Fu, GUO Kong-Hui, LI Bo. Theoretical prediction and comprehensive evaluation for vehicle handling stability[J]. Automobile Engineering, 2001, 23(1): 5-12.
[8] 赵又群, 郭孔辉. 汽车操纵性评价指标的研究[J]. 汽车工程, 2001, 23(1): 1-4.
ZHAO You-qun, GUO Kong-hui. A research on active safety evaluation of vehicle[J]. Automobile Engineering, 2001, 23(1): 1-4.
[9] Bernard J, Pickelmann M. An inverse linear model of a vehicle[J]. Vehicle System Dynamics, 1986, 15(4): 179-186.
[10] Sriclhar J, Hatwal H. A comparative study of four wheel steering models using the inverse solution[J]. Vehicle System Dynamics, 1992, 21(1): 1-18.
[11] Fujioka T, Kimura T. Numerical simulation of mini time cornering behaviour[J]. JSAE Review, 1992, 13(1): 44-51.
[12] 赵又群, 尹浩, 张丽霞, 等. 汽车操纵逆动力学的现状与发展[J]. 中国机械工程, 2005, 16(1): 77-82.
ZHAO You-qun, YIN Hao, ZHANG Li-xia, et al. Present state and perspectives of vehicle handling inverse dynamics[J]. China Mechanical Engineering, 2005, 16(1): 77-82.
[13] Trom J, Vanderplong M, Bernard J. Application of inverse models to vehicle optimization problems[J]. Vehicle System Dynamics, 1990, 19(2): 97-110.
[14] Spentzas K N, Alkhazali I, Demic M. Dynamics of Four-wheel-steering Vehicles[J]. Forschung in Ingenieurwesen, 2001(66): 260-266.
[15] Pacejka H B. Tire and vehicle dynamics[M]. USA: Society of Automotive Engineers Inc, 2002: 212-217.
[16] 喻凡, 林逸. 汽车系统动力学[M]. 北京: 机械工业出版社, 2005: 212-217.
YU Fan, LIN Yi. Dynamics of vehicle system[M]. Beijing: China Machine Press, 2005: 212-217.
[17] 梅凤翔, 刘端, 罗勇. 高等分析动力学[M]. 北京: 北京理工大学出版社, 1991: 126-136.
MEI Fen-xiang, LIU Duan, LUO Yong. Advanced analytical mechanics[M]. Beijing: Beijing Institute of Technology Press, 1991: 126-136.
(编辑 陈灿华)
收稿日期:2011-01-15;修回日期:2011-03-28
基金项目:长江学者与创新团队发展计划项目(IRT0549)
通信作者:邓华(1961-),男,湖南华容人,博士,教授,从事复杂系统建模及智能控制、机电液集成控制与装备自动化的研究;电话:0731-88836769;E-mail: hdeng@mail.csu.edu.cn

