��Hartley�任ʵ����������ѧϵͳ����ģ��ֱ�ӱ�ʶ
���к죬�»��£����
(��ɳ������ѧ �������е����ѧԺ������ ��ɳ��410076)
ժҪ����Դ��������ϵͳ����һ���ַ��̱�ʾ������ʱ��ϵͳ�����Ի���źŵĸ����֣���������ѧϵͳ����ģ����ֱ�ӱ�ʶ�����⣬����Hartley������任���������ʣ���Ƶ����ź�ȥ�룬����źż����ֵĹ���ֵ����������ģ��ֱ�ӹ��Ƶ���С�����㷨��ͨ�����ַ���ֱ��ʶһ������ϵͳ���Ľ�ϵͳ���о�Ƶ��ָ��M��ʱ��T���ʶ���ȵĹ�ϵ��������ʶʱ����ѡ��Ļ���ԭ���⣬���ô˷�����ij������Һѹ�Զ����ϵͳ����ģ�ͽ��б�ʶ������������÷������������н�ǿ��������������һ�ּ�ʵ�õı�ʶ������
�ؼ��ʣ�ϵͳ��ʶ��Hartley�任����������ϵͳ
��ͼ����ţ�TH3 ���ױ�ʶ�룺A ���±�ţ�1672-7207(2007)01--
Direct identification of the parameter model of continuous dynamic
system using Hartley transformation
HE Shang-hong, CHEN Hui-yong, YANG Fu
(School of Automobile and Mechanical Engineering, Changsha University of Science and Technology, Changsha 410076, China)
Abstract: Based on most of the real dynamic systems are continuous in time and can be represented by a set of differential equations, it is difficult to acquire the differentials of input and output signal, the parameter model of continuous time system cannot be identified directly, according to Hartley transformation, inverse transformation and its differential property, the noise was filtered in frequency domain, and the estimators of differential signal were obtained. So, the least-squares algorithm for direct identification of parameter model was formulated. Two models with second order and fourth order were estimated, and the relationship between the frequency index M and the accuracy of identification was investigated, and some tips about design of parameter of Hartley transformation were outlined. Finally, the parameter model of a hydraulic automatic gage control system (HAGC) of cold rolling mill was identified. The result indicates that the method can be used to suppress noise effectively, and it is a simple and practical method.
Key words: system identification; Hartley transformation; continuous-time system
ʵ������ϵͳͨ������һ��(ƫ)�ַ��̼�����Լ����ϵ��ɵ�����ʱ��ϵͳ����Ȼ�������ݺ���ģ�Ϳ�ͨ����ʶϵͳ����ɢģ�ͼ�ӵõ��������ּ�ӷ�����ʱ����ԭ�������ּ����ϵ�ȱ�ݣ���ı�ϵͳ���ȶ���[1]������ģ�Ͳ���ֱ�ӱ�ʶ�����������ڲ���ֱ�Ӳ��������������롢����źŵĸ����֣������ֵĽ��ƴ�����Ӿ�������Ӱ��[2]��ͨ�����ź�ʩ��һ����̬���������Ի�ȡ�ȼ۱�ʶģ��[1-2]�����ػ��ַ���ϵͳ�ַ���ת���ɵȼ۵Ļ��ַ��̣�����������ֳ�ֵ����[3]�����ƺ�������ϵͳ��ʼ�������ն�����û�����ƣ��źŵ��ֱ����ƺ������������棬�����˶��źŵ��ִ���[4]��HE Shang-hong��[5-7]�Ը����ʶ�������о�����Ӧ���ڴ���ҵϵͳ��̬��ѧģ�ͱ�ʶ��������ؼ��������ǵ��ƺ����ĺ�����ƣ����㹤�����ϴ�Hartley�任��R.V.Hartley�����һ�ָ���Ҷ�任�ĵ�Ч��ʽ�������븵��Ҷ�任���Ƶ�����[8-10]���ڴˣ�������������Hartley�任������ʽ�����������ѧϵͳ����ģ�ͱ�ʶ��ֱ�ӷ�����ͨ�����ַ����ҵ������֤�÷�������Ч�ԡ�
1��Hartley�任
Hartley�任�ĺ˺���cas ��t=cos ��t+sin ��t�Ǹ���Ҷ�任�˺���exp(j ��t)=cos ��t +jsin ��t��ʵ�����鲿֮�͡����������ź�f(t)��������Ļ��ִ��ڣ�����Hartley�任����Ϊ[8]��
 �� (1)
�� (1)
���У�cas ��t=cos ��t+sin ��t������Ӧ�ķ��任Ϊ��
 �� (2)
�� (2)
�ӱ任Hf(��)���Կ�����Hartley�任�븵��Ҷ�任�dz����ƣ�����֮����ڽ��ܵĹ�ϵ�����ǣ�����ָ�����ǣ�Hartley�任��Ȼ��ʵֵ�任������Ҳ��һ��һһ��Ӧ�ı任�����ᵼ���ź��κ�Ƶ����Ϣ�Ķ�ʧ[11]��Hartley�任�����������ʡ�
a. �߶ȱ任���ʡ���K��0ʱ���У�
 �� (3)
�� (3)
b. �����ʡ��� ����f(n)(t)������Hartley�任Ϊ��
����f(n)(t)������Hartley�任Ϊ��
 �� (4)
�� (4)
����b.������ģ�ͱ�ʶ�dz���Ҫ��������һ���ʿɵõ��źŸ����ֵ�Hartley�ף���任���ȡ�źŵĸ����֡�
��ʵ�ʼ�������У���������ɢHartley�任��
��f(n)(n=0��1������N-1)Ϊһʵֵ���У�������ɢHartley�任����Ϊ��
 �� (5)
�� (5)
���У�k=0��1������N-1��ʽ(5)�ķ��任Ϊ��
 �� (6)
�� (6)
Ȼ����ֱ������Hartley��ɢ�任ͨ�������ܻ�������任�ĺܺý��ƣ�������ø��������������ʽ����Hartley�任��
 �� (7)
�� (7)
ʽ�У� ����0=2��/T��2L+1Ϊ��
����0=2��/T��2L+1��
���������г��ȣ�TΪ�źų���ʱ�䡣
2������ģ��ֱ�ӱ�ʶԭ��
���ڵ����뵥���������������ѧϵͳ�����ַ���ģ�Ϳ��Ա�ʾΪ��
Ҫ��ʶʽ(8)���ؼ���Ҫ���u(j)(t)��y(i)(t)����ֱ�Ӷ��źŽ��н��ƴ�������������Ŵ����⡣Ϊ��Ч���������⣬����Hartley�任�����ֵ����ʻ����������ź�u(t)��y(t)��������ֵ�Hartley��
 ��
�� ������
������ ��
�� ��
�� ������
������ ��������0=2��/T��m=0��
��������0=2��/T��m=0��
��1����2��������M����Hartley��Ƶ��ָ����Ȼ��
����Hartley���任��� ��
�� ������
������ ��
�� ��
�� ������
������ �������Ϳ��Եõ�������
�������Ϳ��Եõ�������
��ʽ(10)����С���˹��ƣ�
 �� (11)
�� (11)
3����ʶʵ��
3.1����������
3.1.1������ģ�ͱ�ʶ
��ij�����뵥��������Զ���ϵͳΪ
�����ź�Ϊu(t)=0.5[1+sin (0.3��t)+cos (0.5��t)]����ʽ(12)�����Ľ�����-���ڷ����з��棬����ģ������źš����������t��0.02 s���ܲ���ʱ��T��30 s��Ϊ��ģ��ʵ�ʲ�������������㷨����������ֹ��������ģ����������ź��м����˹����������Ϊ��ʶ�㷨����������źš�Ϊ���ų�������������صĸ��ţ�����֤����������Ч�ԣ���ÿһ����������ǿ�Ȧ��¶���ʩ�Ӱ�������ȡ50�ζ�����ʶ�����ƽ��ֵ��Ϊ��ʶ��������У�����ǿ��
����Ϊ  �� (13)
�� (13)
������� 
����ʾ�������Ƶ�ƫ����У� �ͦ�i�ֱ��ʾ����
�ͦ�i�ֱ��ʾ����
����ֵ��ϵͳ����ʵ������n����ʾ�����ƵIJ���������
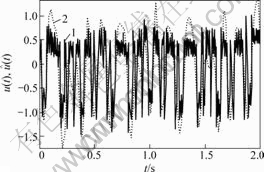
ȡƵ��ָ��M��11��ͼ1��ͼ2��ʾΪ����ǿ��
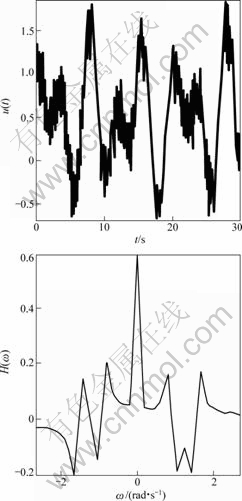
ͼ1��ϵͳ����u(t)����Hartley��
Fig.1��System input u(t) and its Hartley spectrum
��u=��y=30%ʱ����ϵͳ���������ݺ�������ݼ�����Ӧ��Hartley�ס�ͼ3��ͼ4��ʾ�ֱ�Ϊ�����źŵ�һ�ס��������źŷ���ֵ������Hartley�任����任��õ��ֹ���ֵ�����Կ���������ʱ�䴰�ڶ˵㸽����ֵ֮�⣬����Hartley�任����任�õ���һ�ס�

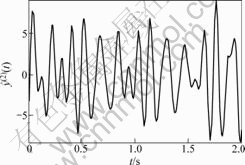
ͼ2��ϵͳ�������y(t)����Hartley��
Fig.2��Output y(t) and its Hartley spectrum of simulation system
��1������ϵͳ������ʶ���
Table 1��Parameters identification results of two-order system
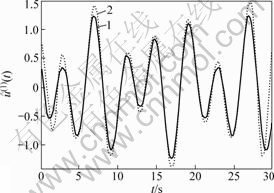
1����ֵ��2������ֵ
ͼ3������ϵͳ�����ź� ��һ���ּ������ֵ
��һ���ּ������ֵ
Fig.3��One-order differential of input signal u(t)
and its estimation  of simulation system
of simulation system
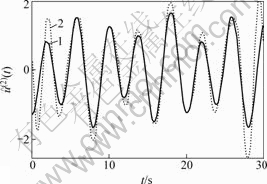
1����ֵ��2������ֵ
ͼ4������ϵͳ�����ź��Ķ����ּ������ֵ
Fig.4��Two-order differential of input signal u(t)
and its estimation of simulation system
�����ֹ���ֵ�Ƚ�ȷ���������źŵ�һ�ס���������ֵ�����źŴ����ı߽�ЧӦ���ڴ��ڶ˵㴦��ֵ��һ����
3.1.2���Ľ�ģ�ͱ�ʶ
��һ�����Ľ�ϵͳΪ
�ܲ���ʱ��T��20 s��M��13����������źŻ�ȡ��ʽ����������ϵͳ����ͬ��
��2��ʾΪ�Ľ�ϵͳ��ʶ��������Կ��������ñ��ķ�����ʶ�߽�ϵͳ����ʶ���Ƚϸߣ�����ͽ�ϵͳ��ȣ���ʶ�ľ����������ͣ���������Hartley�任�����任��õĸ߽����źž��нϴ�������¡�
����������������������źţ�������źŵĸ������⣬�Ժ��������źŽ������˲���������������������Ӱ�졣�����ͬʱ��Hartley������任�Ľ��Ƽ�������һ��������ˣ�����ע��Hartley��Ƶ��ָ��M��ʱ��T��ѡ���븵��Ҷ�任���ƣ�
��2���Ľ�ϵͳ������ʶ���
Table 2��Parameters identification results of four-order system
ʵ��ϵͳ���źŵ�Hartley��Ҳ������|m��0|����f��(m=0����1����2��������M����f��ʾ�źŵ�Ƶ����)���������źŵ�Hartley�����ǽ������ȵش����ڸ�Ƶ�ʵ㣬��ˣ���ѡ����ʵ�Mʹ֮����ʵ��ϵͳƵ��ͬʱ��Ӧ��������������Ӱ�졣��ͼ5���Կ����������Ƿ������������ѡ���M��һ����Χ��ʱ�����ܻ�ñȽϸߵĹ��ƾ��ȡ�����֤������M=(3~7)����s/��0(��sΪ���뼤���źŵ�Ƶ��)ʱ����ʶ���Ƚϸߡ����⣬ʱ��T��ϵͳ��ʶ�ľ���Ҳ�к���Ҫ��Ӱ�졣T����ѡ���㹻���Ա�֤�����ź��ܹ���ּ���ϵͳ��ͬʱ���Ƶ�ʷֱ�����ʹ֮�ܹ���ַ�ӳ�������ݵ�Ƶ�׳ɷ֡�


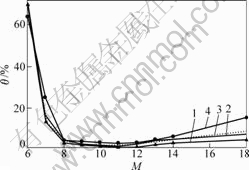
��/%: 1��0��2��20��3��40��4��80
ͼ5��M��ϵͳ��ʶ���ȵ�Ӱ��
Fig.5��The influence of M to identification accuracy of system
3.2�������ʶʵ��
Ϊ�����㷨����Ч�ԣ�������������ijƽ����Һѹѹ��ϵͳ(Hydraulic Automatic Gage Control, HAGC)���в�����ʶ����ʶ�������ڹ���ij����ƽ������������״̬�����߽��е�[12]��������[12]�ṩ�����ݽ��в�����ʶ���ں��Է��������ؼ���ģ�ͽ��м�����HAGCϵͳ����1/2��ģ��������
ͼ6��ͼ7��ʾ�ֱ�Ϊ����ϵͳ������ʶ��ijʱ��ε������������u(t)��y(t)������Hartley�任����任��õĹ���ֵ����ͼ8~11��ʾΪ����ϵͳ�����ֵu(t)һ�Ͷ����ֹ���ֵ��
ȡM��22����HAGCϵͳģ��Ϊ��
Ϊ��������ʶ����ģ�͵���ȷ�ԣ�������ģ�ͼ����Ƶ����������ر�ʶ��Ƶ�����߽��жԱȡ�ͼ12��ʾΪ��Ƶ����Ƶ�ĶԱ����ߡ����Կ�������ϵͳ��ЧƵ�ʷ�Χ�ڣ�����ʶ�IJ���ģ��Ƶ����������ر�ʶʵ������������ã���Ƶ��Ϊ�������š�
1����ֵu(t)��2������ֵ
ͼ6������ϵͳ������ֵu(t)�������ֵ
Fig.6��True value u(t) and its estimation of the tested
system input
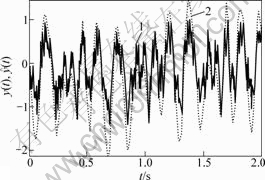
1����ֵy(t)��2������ֵ
ͼ7������ϵͳ�����ֵy(t)�������ֵ
Fig.7��True value y(t) and its estimation
of the tested system output
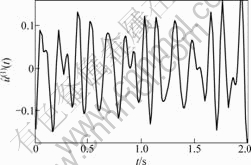
ͼ8������ϵͳ�����ź�u(t)��һ���ֹ���ֵ
Fig.8��Estimation of one-order differential of
input signal u(t) of the tested system
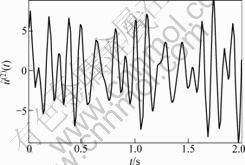
ͼ9������ϵͳ�����ź�u(t)�Ķ����ֹ���ֵ
Fig.9��Estimation of two-order differential of input signal u(t) of the tested system
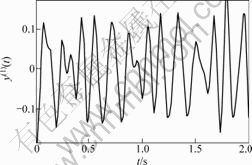
ͼ10������ϵͳ����ź�y(t)��һ���ֹ���ֵ
Fig.10��Estimation of one-order differential of
output signal y(t) of the tested system
ͼ11������ϵͳ����ź�y(t)�Ķ����ֹ���ֵ
Fig.11��Estimation of two-order differential
of output signal y(t) of the tested system

(a) ������Ƶ���ߣ�(b) ������Ƶ����
���������ʶ�����2�����ı�ʶ���
ͼ12��ϵͳƵ�����ԱȽ�
Fig.12��Comparsion of frequency response curves of system
4���ᡡ��
a. ����Hartley������任���������ʣ���ȡ�ź��֣����������źŵIJ������Ժ����źŽ���ֱ�Ӵ���������С�����㷨ʵ����������������ѧģ�Ͳ����Ĺ��ơ�
b. �о���Ƶ��ָ��M��ʱ��T��ϵͳ��ʶ���ȵ�Ӱ�졣���漰��ҵ���������������ֱ�ʶ�����нϺõ�����������������Ч�ر�����ֱ�����ò������ݻ�ȡ���źſ��ܴ����Ľϴ���ͬʱ��Hartley �任��ʵ�任��Ҳ�������˼����ٶȡ�
�ο����ף�
[1] Unbehauen H, Rao G. P. A review of identification in continuous-time systems[J]. Annual Review in Control, 1998, 22: 145-171.
[2] Unbehauen H, Rao G P. Identification of continuous systems[M]. Amsterdam: North-Holland, 1987.
[3] Sagara S, Zhao Z Y. Numerical integration approach to on-line identification of continuous time systems[J]. Automatica, 1990, 26(1): 63-74.
[4] Co T B, Ungarala S. Batch scheme recursive parameter estimation of continuous-time systems using the modulating function method[J]. Automatica, 1997, 33(6): 1185-1191.
[5] HE Shang-hong, LI Bing, ZHONG Jue. Continuous-time system identification using Gaussian modulating filters[C]//Proceedings of the 5th World Congress on Intelligent Control and Automation (WCICA04). Hangzhou, 2004: 299-301.
[6] HE Shang-hong, ZHONG Jue. Identification of linear continuous-time system using wavelet modulating filters[J]. Journal of Systems Engineering and Electronics, 2004, 15(3): 270-277.
[7] ���к�, �ӡ���. ���ڵ��ƺ�������������������ѧϵͳ����ģ����[J]. ��е����ѧ��, 2003, 39(12): 129-134.
HE Shang-hong, ZHONG Jue. Parameter estimation of linear continuous-time dynamic system using modulating functions method[J]. Chinese Journal of Mechanical Engineering, 2003, 39(12): 129-134.
[8] �Ź���, �˰���. ����������������Ӧ��[M]. ����: ������ҵ������, 1992.
ZHANG Gong-li, PAN Ai-ling. The theory and application of digital spectrum method[M]. Beijing: Defense Industry Press, 1992.
[9] Chul H P, Gerard L. Fast hartley transforms for spectral anslysis of ultrasound Doppler signal[J]. IEEE Transaction on Biomedical Engineering, 1988, 35(10): 885-888.
[10] ������, ������, ������. �ù������任����һ������������ϵͳ�IJ���[J]. ����������Ӧ��, 2000, 17(5): 683-688.
MU Zhao-li , LIU Feng, QIU Zu-lian. Parameter estimation of a class of continuous nonlinear systems by Hartley transformation[J]. Control Theory and Applications, 2000, 17(5): 683-688.
[11] Patra A, Unbehauen H. Identification of a class of nonlinear continuous-time systems using Hartley modulating functions[J]. Int J Control, 1995, 62(6): 284-290.
[12] ���к�. ��������ѧϵͳ����ģ�ͱ�ʶ����ҵӦ��[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2002.
HE Shang-hong. Parameter model identification of continuous-time dynamic system and industry application[D]. Changsha: School of Mechanical and Electrical Engineering, Central South University, 2002.
�ո����ڣ�2006-06-15
������Ŀ������ʡ��Ȼ��ѧ����������Ŀ(04JJ3029)������ʡ�������ص�������Ŀ(05A017)
����飺���к�(1965-)���У����������ˣ����ڣ����¸��ӻ�еϵͳ��ģ�������о�
ͨѶ���ߣ��»��£��У���ʿ�о������绰��13671657324

