J. Cent. South Univ. Technol. (2011) 18: 2122-2130
DOI: 10.1007/s11771-011-0952-7
Settlement monitoring system of pile-group foundation
CHEN Zhi-jian(іВЦѕјб)1, ZHANG Ning-ning(ХЕДюДю)1, ZHANG Xiong-wen(ХЕРЫОД)2
1. School of Earth Science and Engineering, Hohai University, Nanjing 210098, China;
2. Jiangsu Transportation Research Institute Co., Ltd., Nanjing 211112, China
? Central South University Press and Springer-Verlag Berlin Heidelberg 2011
Abstract: In order to realize information construction on settlement of pile-group foundation of Sutong Bridge, the monitoring instruments of high-precision micro-pressure sensor and hydrostatic leveling and settlement profiler were integrated synthetically. A set of practical multi-scale monitoring system on settlement of super-large pile-group foundation in deep water was put forward. The reliable settlement results are obtained by means of multi-sensor data fusion. Finite element model of pile-group foundation is established. By analysis of finite element simulated calculation of pile-group foundation, rules of settlement and uneven settlement obtained by monitoring and calculation results are coincident and the absolute error of settlement between them is 4.7 mm. The research shows that it is reasonable and feasible to monitor settlement of pile-group foundation with the system, and it can provide a method for the same type pile-group foundation in deep water.
Key words: pile-group foundation; settlement; monitoring system; multi-sensor data fusion
1 Introduction
In bridge engineering, settlement (including absolute settlement and differential settlement) of pile-group foundation is an important index reflecting construction safety and quality. Sutong Bridge near Yangtze estuary is the longest cable-stayed bridge in the world with a span of 1 088 m. It has the largest pile-group foundation which is composed of 131 piles and the highest cable tower of 300.4 m. Composition structure, geological conditions and construction process of pile-group foundation are extremely complicated, so there are many influence factors of settlement. Calculation methods of settlement adopted by most of criteria are usually conservative and theory basis is scant and deficient [1]. Thereby, it is still difficult to exactly reflect settlement process of pile-group foundation by using existing design, test and numerical calculation. In order to analyze the settlement condition of pile-group foundation in the period of bridge construction and operation, and to ensure the engineering construction and operation safe, safety monitoring becomes an inevitable demand and technical assurance [2-3]. The effective way to improve the reliability of monitoring results is to realize information construction of settlement. The important support of information construction is the establishment of on-site monitoring system.
The practice shows that settlement process of cable tower is progressive. For precise geodetic survey methods, there are a few drawbacks such as large workload, too long work time and fluctuating precision which are seriously affected by meteorological factor and tidal level. So, the usability of observation results is decreased greatly [4-5]. Therefore, settlement observation is still a technical problem. According to the complication of pile-group foundation, based on multi-scale monitoring theory, by the integration of high-precision monitoring sensors, the settlement monitoring system is put forward. It can be used to guide the information construction of super-large pile-group foundation in deep water.
2 Multi-scale monitoring systems of settlement
2.1 Establishment of sensor system
Multi-scale monitoring systems mostly include sensor system, data acquisition and data fusion. Among them, sensor system is the hardware basis. As the core of safe monitoring system, the layout of sensors must be reasonable to meet the requirements of multi-scale level, wide angle range, long-term stability and high reliability, so that comprehensive and continuous multi-source information can be obtained [6]. Information reflecting safe stability and operation status of pile-group foundation can be captured truly, objectively and comprehensively. In the settlement monitoring system of pile-group foundation, sensors include the following three types.
Settlement profiler monitoring technique is to pre-embed settlement profiler pipes (including transverse direction and longitudinal direction) within the super-large pile cap. Periodic artificial observation is done by movable settlement profiler instrument. The advantage is that periodic observation can be done according to the requirement at any time and the observation time is flexible. The distance between monitoring points can be determined according to the requirement, and the minimum distance can be down to 20 cm, so the flexure deformation of pile cap can be acquired. The disadvantage is that differential settlement values of pile-group foundation can be got instead of absolute settlement. Besides, the workload of correction to tidal level effect is very large and the monitoring precision is affected by plane location precision and operation method of settlement profiler instrument. The monitoring principle of settlement profiler is shown in Fig.1.
Hydrostatic leveling monitoring technique is to arrange several hydrostatic leveling instruments on the super-large pile cap. They are connected by hydraulic and atmospheric pipe. Using the theory of connected device, the monitoring of differential settlements between two points is achieved. The advantage is that high-frequency continuous tracking observation can be rapidly achieved. And the precision is higher than that of settlement profiler monitoring. The disadvantage is that absolute settlement value cannot be got. Distance between monitoring points is beforehand set, so only differential settlement values between existent points can be got. Besides, the cost of sensors is excessively high when needing more monitoring points. Monitoring principle of hydrostatic leveling is shown in Fig.2.
Micro-pressure sensor monitoring technique is to arrange a reference point in the relative stability area around pile-ground foundation and monitoring points on the pile cap. They are also connected by hydraulic and atmospheric pipe. Using the theory law of connected device, absolute settlement of pile-group foundation is acquired. The advantage is that high-frequency continuous tracking observation can be rapidly achieved. Absolute settlement can be acquired and the precision is high. Besides, the correction of tidal level is done easily. The disadvantage is the same as hydrostatic leveling monitoring. Monitoring principle of micro-pressure sensor is shown in Fig.3.
By the further study on monitoring principle of three sensors, the mechanism of the settlement monitoring system is presented as follows.

Fig.1 Monitoring principle of settlement profiler

Fig.2 Monitoring principle of hydrostatic leveling

Fig.3 Monitoring principle of micro-pressure sensor
The point on pile cap synchronously monitored by micro-pressure sensor and hydrostatic leveling instrument is assumed as point Pi. The monitoring value of the micro-pressure sensor at Pi is assumed as hi. Because of the existence of reference point in the micro-pressure system, hi is the absolute settlement of Pi. ?hi,i+1 represents the monitoring value (relative settlement) between hydrostatic leveling instruments. Absolute settlement of another point Pi+1 can be calculated by
hi+1=hi+?hi,i+1 (1)
Through the same way, absolute settlement of arbitrary hydrostatic leveling point can be calculated. The point synchronously monitored by settlement profiler and hydrostatic leveling instrument is assumed as Pj and absolute value hj can also be calculated by Eq.(1). Absolute settlement of each point along the line of settlement profiler can be got. Thereby, settlement distributing rule of pile-group foundation on the plane of pile cap can be acquired.
2.2 Multi-sensor data fusion system
Multi-sensor data fusion system is the core processor of effective procession, coordinated optimization and comprehensive evaluation on multi-source data from sensor system. By using the advantage of multi-sensor united procession, in the shorter time, at a less price, data from several sensors are fused effectively, thereby new and significative information is produced, and this information cannot be got by any single sensor. The process includes data acquisition, data pretreatment, data character extraction, fusion calculation, results output, and so on [7].
Arithmetics of multi-sensor data fusion has many kinds, but sensor kinds are various, so it is very hard to get a current method applied to fuse information of various sensors [8]. Usually, it is ascertained based on the trait and aim of sensor data. Considering that the number of sensors in the monitoring system is small, in order to keep more spot data, monitoring data of hydrostatic leveling and settlement profiler in the same places are fused by estimation theory.
The key of arithmetics is the determination of weight [9-10]. As for the precision, setting condition and disturbed extent of every sensor are different, so the deviation extent from true value is different. Thereby, based on a certain principle, different weights are arranged to every sensor. For monitoring value having the higher reliability, the weight is arranged. In this way, estimated value can more exactly describe the original data information.
The data of m sensors in a certain measurement time are x1, x2, Ў, xm, the weights are ¦Ш1, ¦Ш2, Ў, ¦Шm, and the fusion outcomes of m sensors are as follows:
y=WX=[¦Ш1, ¦Ш2, Ў, ¦Шm][x1, x2, Ў, xm] T (2)
As xi obeys the normal distribution  and the distribution density function y obeys the normal
and the distribution density function y obeys the normal
distribution  by using multivariate
by using multivariate
statistical theory, the output expected values of y after fusion are weighted averages of expected values of various sensors. The accuracy is
 (3)
(3)
Obviously, under the certain condition of ¦Тi, the precision is closely related to the distribution of weight ¦Шi. In order to achieve the highest accuracy of y, the value of ¦Тy should be the minimum. This is a multi- variable conditional extremum problem with equality constraint. By using Lagrange multipliers, when ¦Шi=
 the highest precision can be achieved
the highest precision can be achieved
after fusion as
 (4)
(4)
In this work, for hydrostatic leveling and settlement profiler, the method of weight confirmation is as follows. In the same environment, continuous observations of the same point are done by two sensors, respectively. Monitoring values are listed in Table 1. The stability of results shows that the precision of hydrostatic leveling is higher than that of settlement profiler. The weight is 0.676 and 0.324, respectively.
3 Finite element model
Combined with engineering practice, by means of ABAQUS software, super-large pile-group foundation of Sutong Bridge was analyzed by three-dimensional non-linear finite element method [11-12]. Finite element models of pile group foundation were established.
3.1 Calculation of parameter value
Studies show that Duncan-Chang non-linear elastic model can simulate the deformation characteristics of pile foundation better [13-14]. It approximately considers elasto-plastic deformation characteristics of soil by adjusting elastic coefficient. Also, it is used to calculate the increment and can reflect the effect of stress path to deformation.
Survey data in bridge location shows that bridge location is divided into 22 engineering geology layers. In the existing calculation condition, 22 geology layers cannot just be considered one by one but be generalized. Generalization of soil is done in similar principle [15]. With weighted average values, material parameters (as listed in Table 2) could be gained according to the thickness of soil.
Section of pile is predigested as eight-square by equivalent girth. In the calculation, steel casing and change of pile diameter are not considered. Constitutive models of pile and pile cap adopt linear elastic models. Material parameters are selected by carrying out weighted average to volumes of concrete and reinforcing steel. Elastic modulus of pile E is 35.6 GPa, Poisson ratio ¦Л is 0.167 and weight is 24.5 kN/m3. Material parameters of pile cap are listed in Table 3. Generalization model established is shown in Fig.4.
3.2 Calculation results
In order to simulate the settlement of whole construction process, numerical calculation is done according to the follow working conditions: formation of initial ground stress field, pile pouring, steel boxed cofferdam construction, pile cap pouring, cable tower construction, steel box girder hoisting and bridge deck pavement. Pile cap pouring is divided into five layers and load acting on piles is about 1 615 900 kN. The cable tower pouring is divided into sixty-nine segments and the load acting on the top of pile cap is about 785 180 kN. The load of steel box girder is about 641 100 kN and the load of bridge deck pavement is about 318 627.4 kN.
According to the working conditions above, the settlement of pile-group foundation is calculated. The settlement contour map of pile cap after cable tower pouring is shown in Fig.5.
4 Application of settlement monitoring system in Sutong Bridge
4.1 Design of monitoring points
Northern cable tower of Sutong Bridge is regarded as research object. The installment of settlement monitoring systems of pile-group foundation keeps step with the construction of pile cap. Along with the pouring of pile cap, three lines of settlement profiler are laid. One is in the transverse direction (L1) and the other two are in the longitudinal direction (L2 and L3). After finishing the pouring of pile cap, monitoring system including two micro-pressure sensors (S0 and St) and five hydrostatic leveling points (S1-S5) is set up on the pile cap. In micro-pressure sensor system, as a reference point, S0 is fixed on the steel pile which is not subjected to loadings away from foundation pile. St is in the northwest corner of pile cap, which is the same position as point S1 of hydrostatic leveling system. The arrangement plan of measure points is shown in Fig.6.
Table 1 Comparison of measured values between hydrostatic leveling and settlement profiler

Table 2 Material parameters of soil layers used in calculation

Table 3 Material parameters of pile cap used in calculation


Fig.4 Finite element model
4.2 Data processing of multi-scale monitoring
Settlement monitoring of pile-group foundation in Sutong Bridge is from finishing the pouring of pile cap to finishing the operation. Monitoring data during the pouring of cable tower are chosen to be researched. The measured results of settlement profiler and hydrostatic leveling are shown in Fig.7 (positive values stand for sinkage).
The measured results show that the settlement increases slowly in the every part of pile cap, and the settlement in the middle area is obviously larger than that in the upriver and downriver areas. In the longitudinal direction, the maximal settlement difference is about 3 mm. The flexure distortion is hardly found. In the transverse direction, before pouring lower cross beam (from 2005-07-25 to 2005-11-02), settlement difference gradually increases, and the maximal value could be up to 16 mm. So, the flexure distortion is gradually aggravated. After the intensity and stiffness of lower cross beam are formed (from 2006-02-16 to 2006-09-20), the settlement difference gradually diminishes and the force state has been preferably meliorated. According to integration method of multi-scale monitoring on settlement, S0 is regarded as a reference point and absolute settlement values of five hydrostatic leveling points are calculated in turn. The calculation results are shown in Fig.8.
According to the absolute settlement values of hydrostatic leveling points, one of each point along the line of settlement profiler can be calculated. However, arrangement location and measurement precision between two kinds of sensors are different. In order to improve the precision and reliability, it is necessary to carry out data fusion of monitoring data of two sensors.
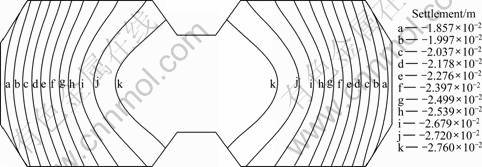
Fig.5 Settlement contour map of pile cap

Fig.6 Arrangement plan of measure points in monitoring system

Fig.7 Measured values of settlement profiler and hydrostatic leveling instruments

Fig.8 Absolute settlement values of hydrostatic leveling points
In data fusion, the first work is to make time registration of monitoring in data in which the abnormal values of two sensors are eliminated [16]. The next is to choose common position monitored by two sensors to calculate the differential settlements. The arrangement plan of measure points (Fig.6) shows that S2, S4 and S5 are monitored synchronously. S2 is regarded as a reference point. Relative to S2, differential settlements of S4 and S5 are respectively acquired (Fig.9). In the end, date fusion of two sensors is done according to the optimal assignment of weight. With the two weights of 0.676 and 0.324 got before, the fusion results are obtained (Fig.10). With settlement results after fusion, plentiful monitoring values can be amended. Taking point S5 for example, the amended absolute settlement is shown in Fig.11.

Fig.9 Registration results between two sensors

Fig.10 Fusion results between two sensors

Fig.11 Absolute settlement of S5 after being amended
4.3 Checking of monitoring results
The reliability of monitoring system is checked up by results of finite element calculation. As Fig.5 shows, the main law of settlement of pile cap is that the settlement in the middle area is obviously larger than that in the upriver and downriver areas and the settlement in the medial axis is larger than that in the southern and northern sides. This law is consistent with that by settlement profiler and hydrostatic leveling instruments. By comparing settlement and uneven settlement calculation results of the whole pile cap and monitoring results after fusion, contrast results are shown in Table 4.
Table 4 Comparison of monitoring values and prediction values of whole pile cap

Table 4 shows that the total settlement values during the cable tower pouring gained by calculation are slightly larger than those gained by monitoring system. The absolute error is 4.7 mm. The reasons might include: 1) not considering the effect of steel casing, 2) not considering the effect of pile-bottom post-grouting on pile-tip soils, and 3) not considering the effect of liquid concrete on soils around pile. However, in this process, for uneven settlement of pile cap, caculation values are slightly less than monitoring values. The reason can be related to layered pouring construction technology of high cable tower not considered in the calculation.
5 Conclusions
1) Along with the construction of bridge, differential settlements of pile-group foundation can be measured in the process of the following construction. Flexure distortion of pile cap can be real-time monitored to ensure the stability of super-high cable tower.
2) Based on the integration principle of three sensors, absolute settlement values of pile-group foundation can be calculated.
3) Finite element model is successfully established. By checking the settlement calculation values, settlement monitoring system is verified to be rational.
4) The study results have been validated in Sutong Bridge, and settlement monitoring system has a good foreground of engineering application.
References
[1] GAO Rui, HU Nian, ZHU Bin. Experimental study and numerical analysis on bearing behaviors of super-long rock-socketed bored pile groups [J]. Journal of Southeast University: English Edition, 2010, 26(4): 597-602.
[2] HUANG Fang-lin, HE Xu-hui, CHEN Zheng-qing, ZENG Xu-hui. Structural safety monitoring for Nanjing Yangtze River Bridge [J]. Journal of Central South University of Technology, 2004, 11(3): 332-335.
[3] WENZEL H. Health monitoring of bridges [M]. New York: John Wi1ey & Sons, 2009: 9-15.
[4] TIAN Lin-ya, YUE Dong-jie. Analysis and application of construction survey for large bridge [J]. Engineering of Surveying and Mapping, 2006, 15(4): 51-54. (in Chinese)
[5] YI Ting-hua, LI Hong-nan, GU Ming. Recent research and applications of GPS based technology for bridge health monitoring [J]. Science China: Technological Sciences, 2010, 53(10): 2597- 2610.
[6] KLEIN L A. Sensor and data fusion concepts and applications [R]. Bellingham, WA: Society of Photo-optical Instrumentation Engineers, 1999.
[7] CHEN Zhi-jian, XUE Tao, FENG Ling-yun, BIAN Lei. Application of data fusion algorithm to safety evaluation of pile-group foundation of Sutong Bridge [J]. Chinese Journal of Rock Mechanics and Engineering, 2009, 28(Supp 1): 3270-3276. (in Chinese)
[8] ZHAO Wei, PAN Quan, DAI Guan-zhong, ZHANG Hong-cai. Introduction of multiscale data fusion algorithm [J]. Systems Engineering and Electronics, 2001, 23(6): 66-69. (in Chinese)
[9] WANG Biao, YU Xiao-fen, XU Cong-yu. Weight data fusion based on mutual support applied in large diameter measurement [J]. Chinese Journal of Mechanical Engineering, 2009, 22(4): 562-566.
[10] SONG Kai-chen, NIE Xi-li. Adaptive fusion algorithms based on weighted least square method [J]. Chinese Journal of Mechanical Engineering, 2006, 19(3): 451-454.
[11] HE Si-ming, LU Guo-sheng, LIAO Zu-wei. Analysis of settlement of group piles [J]. Rock and Soil Mechanics, 2003, 24(3): 435-441. (in Chinese)
[12] HE Xu-hui, YU zhi-wu, CHEN Zheng-qing. Finite element model updating of existing steel bridge based on structural health monitoring [J]. Journal of Central South University of Technology, 2008, 15(2): 399-403.
[13] WEI Hong, TANG Bo-ming, DONG Yuan-shuai. Consolidation settlement of sand drain subgrade based on Biot theory [J]. Journal of Chongqing Jiaotong University: Natural Science, 2009, 28(5): 887-891. (in Chinese)
[14] JIANG Shou-yan, XIE Qing-ming, DU Cheng-bin. Development of program of Duncan-Chang E-B and E-¦М models based on ABAQUS [J]. Journal of Hohai University: Natural Science, 2011, 39(1): 61-65. (in Chinese)
[15] AI Zhi-yong, WANG Quan-sheng. A new analytical solution to axisymmetric BiotЎЇs consolidation of a finite soil layer [J]. Applied Mathematics and Mechanics: English Edition, 2008, 29(12): 1617- 1624.
[16] CHEN Zhi-jian, CHEN Song, DONG Xue-wu, LI Xiao-yan. Identification method of singular data and their attribution for safety monitoring [J]. Hydropower Automation and Dam Monitoring, 2004, 28(1): 40-44. (in Chinese)
(Edited by YANG Bing)
Foundation item: Project(2002CB412707) supported by the National Basic Research Program of China; Project(2006BAG04B05) supported by the National Science and Technology Pillar Program during the 11th Five-Year Plan of China; Project(2010B14414) supported by the Scientific Research Program of Center University in China
Received date: 2010-12-24; Accepted date: 2011-05-09
Corresponding author: CHEN Zhi-jian, Professor, PhD; Tel: +86-25-83786962; E-mail: zhijchen@hhu.edu.cn

