���ߴ����������Ŀ�������Эͬ�������
��ɯ�������ˣ������壬��Тƽ
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժҪ�����ö�̬���˻��ƽ��ж�Ŀ�����Эͬ������䣬��������֯��̬���˽����о����ص�̽����Աѡ����ƣ�����������������������Ľ����ܺ�ģ�ͣ��������㶨λ��ԭ���������䶨λ���ȣ������������ͷ������ƽڵ�ѡ��������ģ�͡����ܺ�ģ���뾫��ģ�ͽ�ϣ�������ۺ�����ָ�꺯����ָ����Ա��ѡ�������Ŵ��㷨ʵ�ִ�ѡ�����������������ۺ�����ָ�꺯��ʹ�ܺĺ;���2��ָ�궼�����Ż���֤���������Ŵ��㷨������Աѡ�����Ч�ԡ�
�ؼ��ʣ����ߴ��������磻��Ŀ����٣�Эͬ������䣻��̬���ˣ��ۺ�����ָ�꺯��
��ͼ����ţ�TP393 ���ױ�־�룺A ���±�ţ�1672-7207(2012)08-3031-08
Cooperative task allocation for multi-target tracking in wireless sensor networks
WEN Sha, CAI Zi-xing, LIU Li-jue, REN Xiao-ping
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: Dynamic clusters mechanism was adopted to carry out cooperative task allocation for multi-target tracking, the self-organization process of dynamic clusters was discoursed, and cluster members selection mechanism was described. The situation of energy consumption was analyzed, and the improved energy consumption model was given; then the principle of three-point location was introduced, the location accuracy, the area-sum method to restrict the selection of nodes was proposed, and location accuracy model was constructed. Combining the energy consumption model and the location accuracy model, the comprehensive performance index function was created to guide the selection of cluster members, and genetic algorithm was used to implement the selection of cluster members. The simulation results show that the comprehensive performance index function makes both the energy consumption and location accuracy more optimal, and the results indicate the validity of using genetic algorithm to implement the selection of cluster members.
Key words: wireless sensor networks; multi-target tracking; cooperative task allocation; dynamic clusters; comprehensive performance index function
������������Ƕ��ʽϵͳ�����м����Լ�����ͨ�ż����ķ�չ�����ߴ���������(WSN)�����ú;�������õ��㷺��Ӧ��[1]����Ŀ�������Ϊ���ߴ�����������ȵ��о�����һֱ���ܹ�ע[2]�������е����ߴ���������Эͬ�����ƶ�Ŀ�����������о��ɹ��У�Tseng��[3]ֻ��Ը���1��Ŀ��ʹ�����������ĵȱ������ηֲ������Σ�û�п��Ǵ��ڶ�Ŀ��ʹ���������ֲ��������Լ��������ĵ����ء�Kaplan[4]��Ȼ�����ܺ����أ�����Ҳû�п��Ƕ�Ŀ������������Դ������ͻ���⡣Zhu��[5]���Ǵ������ڵ�����ֲ����Σ�Ҳ�����˶�Ŀ���������ֻ��ͼʹϵͳ�ܺ���ͣ�û�п��Ǿ������ء��ɴ˿�֪��WSNĿ����ټ����Բ����ƣ�����������ؽ���о������IJ��ö�̬���˻���[6-7]����Эͬ������䣬������ϵͳ�ܺ��⣬�����Ƕ�λ���ȣ��������ܺĺ;��ȵ��ۺ�����ָ�꺯��[8]����Ŀ�����ϵͳ���н�ģ���������Ŵ��㷨�����ۺ�����ָ�꺯��ΪĿ�꺯��ָ��������ʵ�ֶ�̬������������Ա��ѡ������ʵ�ָ�ָ��ƽ�⡢�ۺ������Ż���Эͬ������䡣
1 ��̬����Эͬ����������
���ö�̬���˻���[6-7]����������䣬��̬���˻���ִ�й��̿�����ʽ�������������£�
(1) ��Ŀ��T�Ӹ�֪����������뵽��֪�����ڲ�ʱ��ԭ����ѡ����һ���в���Ľڵ���Ϊ����H[9]��H�����㲥��Ϣ��Coming Target��, ������ͨ�ŷ�Χ�ڵ��ڽڵ㡣
(2) �� Ϊ�����ѵ�N���ڵ㹹�ɵļ��ϣ����ڵ����������Ϣ��������ǰ״̬�����ظ���Ϣ���������ݻظ���Ϣѡȡһ�������Ľڵ���Ϊ��Ա��������Ա����
Ϊ�����ѵ�N���ڵ㹹�ɵļ��ϣ����ڵ����������Ϣ��������ǰ״̬�����ظ���Ϣ���������ݻظ���Ϣѡȡһ�������Ľڵ���Ϊ��Ա��������Ա����
 ������Ա����
������Ա���� ������Hһ��1����̬���ˡ�
������Hһ��1����̬���ˡ�
�ڵ�2���У��������ѡȡһ�������Ľڵ㣬������Ա��������Ϊ���ĵ��о��ص㡪����̬��������֯�㷨[2]�����裺1����̬������Ҫ3���������ڵ���ɡ����ǵ��������ڵ���������ƣ�1���ڵ�ֻ�ܼ���1����̬����ʵ�ֶ�1��Ŀ��ĸ��١��������������ж��Ŀ��ʱ����Ҫ�����̬���ˣ���ʱ����ͬ������Ҳ��ѡ��ͬ���Ľڵ���Ϊ���Ա����������ڵ���Դ������ͻ������[10]������������£������Ż�����ؼ��ԵĽڵ�����ʵ����ˣ�����ؼ���Դ���Ե�������䣬�������ܻᵼ�����������ܽ��͡�
2 �ܺ�ģ��
������[10]��ģ��Ϊ���������ݽڵ����������������Ͼ��嶨λ�����������ĵ������ܺ�ģ�͡�
�ڵ����������һ���ɸ�Ӧ�����ݴ������ڵ���ͨ��3���湹��[10]�����У�ռ��������������ǽڵ���ͨ�ţ���ͨ���ܺ���Ҫȡ����ͨ�ž��롣��ˣ�����ͨ�ž�������Ч�ؽ�Լ����������
����M��Ŀ�꣺T1��T2������Tm������TM�������M��������H1��H2������Hm������HM����ȡ1��Ŀ��TmΪ��(1��m��M)�����������ڵ���Hm�������ѵĽڵ��� (��N��)��dmnΪ�����ڵ�Hm�뱻���ѽڵ�
(��N��)��dmnΪ�����ڵ�Hm�뱻���ѽڵ� (1��n��N)֮��ľ��룻��mnΪָʾ��������mn=1ʱ������Hmѡ���ѽڵ���Ϊ���˳�Ա������mn=0ʱ������Hm��ѡ���ѽڵ������˳�Ա��
(1��n��N)֮��ľ��룻��mnΪָʾ��������mn=1ʱ������Hmѡ���ѽڵ���Ϊ���˳�Ա������mn=0ʱ������Hm��ѡ���ѽڵ������˳�Ա��
Ϊʹ�������ͨ���ܺ����٣����������������Ŀ�꺯����
 (1)
(1)
Լ���������¡�
(1) 1���������ڵ�ֻ�ܼ���1�����ˣ��������ߡ��ɽ�����ٶ�Ŀ��ʱ�ڵ���Դ������ͻ���⡣
 ��n=1��2������N
��n=1��2������N
(2) 1��������Ҫѡ��2���ڵ���Ϊ���˳�Ա����֤��ÿ��������3���ڵ���ɡ�
 ��m=1��2������M
��m=1��2������M
(3) ���Ц�mn֮��Ӧ���������������Ա�֤ÿ��Ŀ�궼�õ����䡣
 ��m=1��2������M��n=1��2������N
��m=1��2������M��n=1��2������N
3 ����ģ��
3.1 ���㶨λ������λ���ȷ���
���IJ������㶨λ��[11]��Ŀ����ж�λ�����㶨λ���������Ҫ��֪����Ľڵ���Ŀ�٣���Ӧ�ڴ������ڵ����ʹ洢���������ص㡣�����ԭ��Ϊ����֪�ڵ�A��B��C��λ���Լ�������Ŀ��ľ��룬��3���ڵ�ΪԲ�ģ������ǵ�Ŀ��ľ���Ϊ�뾶��Բ����������ȷ��3��ԲӦ�ý���1���㣬������Ŀ��Ĺ���λ�á����ǣ����ڲ���������3��Բ�����ص�������ͼ1��ʾ����ʱ������2Բ�Ľ���ɶ���1��ֱ�ߣ�����������ֱ�ߵĽ������ΪĿ��Ĺ���λ�á�ͼ1�е�PΪ���ȷ����Ŀ�����λ�á�
���㶨λ����һ�ֻ��ڲ�༼���Ķ�λ[12]�������Ķ�λ���ȳ���ڵ㵽Ŀ��ľ����й��⣬����3���ڵ����Ŀ���λ���йأ�����һ���ľ��뷶Χ�ڣ�3���ڵ��Ŀ���Χ��������ɵ�������֮��ʱ����λ���ȸ���[13]����ͨ������������֤���˽��ۡ�
ȡĿ�����λ����ʵ��λ�õľ���Ϊ��λ��
 (2)
(2)

ͼ1 ���㶨λ��ԭ��ʾ��ͼ
Fig.1 Principle of three-point location
����������ͼ2��ʾ�����鳡����ȡĿ��T������(x0��y0)Ϊ(0,0)������H������(x1��y1)Ϊ(4,7)��2����Ա�ij�ʼλ���Ǻ��������ӽ���(������뼸��Ϊ0)��2����Ա������2��ֱ�������ƶ���3���ڵ�����(��ƽڵ���)Խ��Խ��������Ŀ��Χ�����У�ֱ���յ�a�䣬b�䡣
�Խڵ���Ϊ�����꣬��λ���Ϊ�����꣬�ɵý����ͼ3��ʾ����ͼ3�ɼ������Žڵ�����0��������3���ڵ㽥����Ŀ���Χ�����ϼ�С����2�ڵ��ƶ���a*��b*ʱ(��Ӧ�ڵ���Ϊ5.145 6)����λ�����С��2�ڵ��ټ��������ƶ���3���ڵ��Ŀ��ľ����ѽ�Զ�ˣ���ʱ�����ڲ�����������������ܵ��ĸ�������ȷ�Ƚ��ͣ���λ����ֿ�ʼ���ɼ�����һ���ľ��뷶Χ�ڣ���3�ڵ㽫Ŀ��Χס��ȷʵ�ܼ�С��λ����߶�λ���ȡ�
3.2 ��������ͷ��Ľڵ�ѡ��
���ڵĽڵ�ѡ��ѡȡ3���ڵ㽫Ŀ���Χ������(Ŀ����3��ȷ������������)����ͼ4��ʾ������PAB����PAC�ͦ�PBC�����֮���릤ABC�������ȣ�����ж���P�ڦ�ABC��(������3�����ϵ����)��

ͼ2 ���鳡��
Fig.2 Experimental scene

ͼ3 ��λ�����ڵ�λ�õĹ�ϵ
Fig.3 Relationship between location error and position of nodes

ͼ4 ����ͷ�ʾ��ͼ
Fig.4 Schematic diagram of Area-sum Method
��(xA��yA)��(xB��yB)��(xC��yC)�ֱ�Ϊ3����A��B��C�����꣬��ABC�����������ʽ���㣺

 (3)
(3)
��ˣ�����ͷ��ɱ�ʾΪ��



 (4)
(4)
�




 (5)
(5)
��=0ʱ����P�ڦ�ABC�ڣ����ģ�0ʱ����P���ڦ�ABC�ڣ��Ҧ�Խ��P�릤ABCԽԶ���������ӽ���0������=0������Աѡ��ľ���ָ��Ϊ��
 (MΪĿ�����) (6)
(MΪĿ�����) (6)
4 Эͬ�������ģ��
4.1 ��Աѡ�����
�ۺ����϶��ܺĺ;��ȵķ��������ܽ����Աѡ���һ�����
�ڵ������Ŀ���λ����ͼ5��ʾ��HΪ��ѡ���������� (
( ���߳�4�η�֮��)������ѡ������С�ģ�Ȼ��a��b��H��Ŀ���ͬһ�࣬û�а�ΧĿ�꣬��ʱ��λ���Ƚϵ͡����ڽڵ�c��d����
���߳�4�η�֮��)������ѡ������С�ģ�Ȼ��a��b��H��Ŀ���ͬһ�࣬û�а�ΧĿ�꣬��ʱ��λ���Ƚϵ͡����ڽڵ�c��d���� �Դ�������H��c��d����Ŀ���ͬһ�࣬���ǽ�Ŀ��Χ��3���ڵ���ɵ�������֮�ڣ����ܴ�ʱc��d��������ľ����Զ������λ����ȴ���ߡ��ۺϿ����ܺ��뾫�ȵ�����£�Ӧѡ��ڵ�c��d������ѡ��ڵ�a��b������ͼ5�У�
�Դ�������H��c��d����Ŀ���ͬһ�࣬���ǽ�Ŀ��Χ��3���ڵ���ɵ�������֮�ڣ����ܴ�ʱc��d��������ľ����Զ������λ����ȴ���ߡ��ۺϿ����ܺ��뾫�ȵ�����£�Ӧѡ��ڵ�c��d������ѡ��ڵ�a��b������ͼ5�У�
(1) �����൱�����Դ�������ѡ��c��d����Ա��
(2) ��Զ��������ѡ��a��b����Ա����Ϊ���ܴ�ʱ������ͨ���ܺĴ��Ҳ�������ˣ����¶�λ���Ҳ���ʲ���ѡ��c��d����Ȼѡ��a��b�Ϻá�

ͼ5 �ڵ������Ŀ���λ��
Fig.5 Node Location to target
4.2 �ۺ�����ָ�꺯��
���ܺ�ָ���뾫��ָ����м�Ȩ���Ӷ��õ��ۺ�����ָ�꺯�����裺
 (7)
(7)
 (8)
(8)
�ۺ�����ָ��Ŀ�꺯��Ϊ��

0�ܦ�1��1��0�ܦ�2��1 (9)
���У���1�ͦ�2�ֱ�ΪJ1��J2��Ȩ�أ�����Ȩ�ؿɴﵽ��ѵĸ���Ч������ʵ��Ӧ���У�Ҳ�ɸ����ܺĻȵ�ƫ�أ�ͨ������Ȩ�أ��ﵽӦ��Ҫ��
5 �����������
������Ա��ѡ����һ��Ѱ�����Ž�Ĺ��̡������Ŵ��㷨��ʵ�ִ�Ѱ�Ź��̣�����MATLAB�жԶ�Ŀ����ٺ�������Աѡ����̽��з��档
5.1 �����������
ȡ100������ʱ�̣�2������˶���Ŀ�꣬�˶����س�����Ϊ100 m��100 m�ľ��γ��أ�������ֲ�256���ڵ㡣
�Ŵ��㷨�У����ʼ��Ⱥ����(��Ⱦɫ��)��Ϊ100������������Ϊ100����ÿ���ڵ����8��2����λ���룬��ôÿ��Ⱦɫ��(����)��32��2����λ���轻�����Ϊ0.9���������Ϊ0.01��
5.2 ������������
ͼ6~9��ʾ�ֱ�Ϊ�������ܺġ������Ǿ��ȼ��ۺϿ����ܺĺ;���3������µĸ��ٹ켣ͼ����λ���ͼ������������������ͼ���Ŵ�������ÿ��������Ӧֵ�仯ͼ���ڼ�������������ĵ�����ʱ�����ڵ����ĵ��������㹫ʽ�μ�����[10]��
�ۺϿ����ܺĺ;���ʱ��������ɵã���1ȡ0.6����2ȡ0.4����ȡ10������Ч����ѣ������ܺ��붨λ������ȡ�ýϺõ�ƽ�⡣
�Ƚ�ͼ6��֪����ʹ������ͷ�Լ��ʱ��Ŀ�����켣���⻬��ijЩ�����ƫ��ʵ�ʵ��Զ������Ϊ�Ǵ���㣬����Ч���ϲ��������ͷ�����Ч���кܴ���ߣ�����Ȩ(ͼ6(c2))�ֱ�Ӳ��Լ�� (ͼ6(b2))�ĸ���Ч�����á��Ƚ�ͼ6(b1)��(c1)�ɼ���ͼ6(b1)�е���Ա�ȽϷ�ɢ�����������˶��켣��β������Ҫԭ�������Ӳ��Լ��3���ڵ㽫Ŀ��Χסʹ��ѡ������п��������Ͻ��IJ���ΧסĿ��ĵ㣬��ѡ��Զ�ܶ����ΧסĿ��ĵ㡣����������£�Ŀ��Ķ�λ���Ȳ���û�мӴ�����С����Ҳ�ɴ�ͼ7(b)��7(c)������
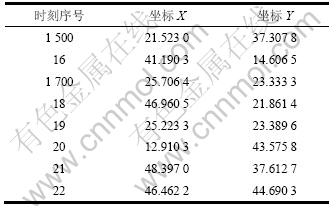
��ͼ6�У�������1���ڵ���2������ѡ�еı�ǡ� ���͡�
���͡� �� ���ⲻ������ڵ�ͬһʱ�̱�2������ѡ�У������ڲ�ͬ��ʱ�̣���2�����˷ֱ�ѡ�С��ɱ�1��2��֪������Ŀ��0������(�������0)�ڵ�30ʱ��ѡ�нڵ�(21.523��37.3078)��������1�ڵ�15ʱ����ѡ������ڵ㡣���⣬����0�ڵ�32ʱ��ѡ�нڵ�(46.4622��44.6903)������1�ڵ�22ʱ��Ҳѡ������ڵ㡣
�� ���ⲻ������ڵ�ͬһʱ�̱�2������ѡ�У������ڲ�ͬ��ʱ�̣���2�����˷ֱ�ѡ�С��ɱ�1��2��֪������Ŀ��0������(�������0)�ڵ�30ʱ��ѡ�нڵ�(21.523��37.3078)��������1�ڵ�15ʱ����ѡ������ڵ㡣���⣬����0�ڵ�32ʱ��ѡ�нڵ�(46.4622��44.6903)������1�ڵ�22ʱ��Ҳѡ������ڵ㡣
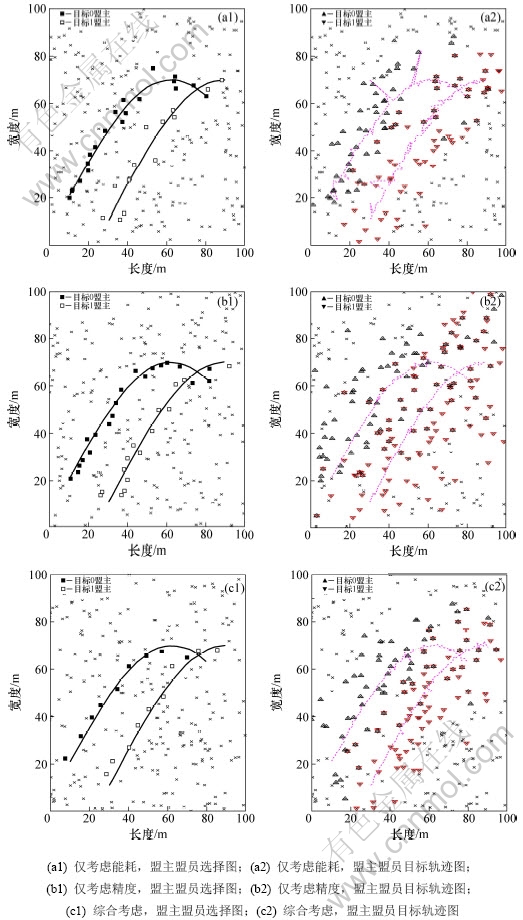
ͼ6 ������Աѡ��Ŀ��켣ͼ
Fig.6 Selection of cluster head and member and tracks of targets
�Ƚ�ͼ7�е�3����ͼ����ʹ������ͷ�Լ��ʱ����λ���ϴ�ʹ������ͷ���λ������Լ�С������Ȩ(ͼ7(c))�ֱ�Ӳ��Լ��(ͼ7(b))������С����һ������ͼ6��ʾ�Ĺ켣ͼ���������
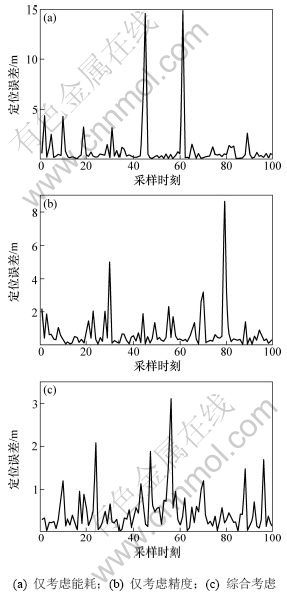
ͼ7 Ŀ��0��λ���
Fig.7 Location error for target 0
ͼ8��ʾ����ѡijһʱ��(����ѡ����100ʱ��)����������������ͼ����������ÿһ���У����������Ӧֵ��Ⱦɫ���Ӧ��4���ڵ�����Ա������Ե�����������ˣ��������������ĵ�����������ͼ8�ɼ��������Ŵ�����ѡ��������Ա������Ӧ���������ĵ�����Խ��ԽС�����Ҽ�С���dz�����������С�������ܺģ�֤���ۺ�����ָ�꺯���ĺ����ԣ������Ŵ��㷨������Աѡ�����Ч�ԡ�
��1 ��ͬ���˵���Ա(Ŀ��0)
Table 1 Members of different clusters (target 0)


ͼ8 ��100ʱ�̸���������������ͼ
Fig.8 Energy consumption of every generation of cluster at 100th time

ͼ9 ��30��60ʱ��ÿ��������Ӧֵ�仯ͼ
Fig.9 Change of every generation of best adaptive value at 30th and 60th time
ͬ�����Ƚ�ͼ8�е�3����ͼ��֪��ͼ8(a)�����ڲ�ʹ������ͷ������ƣ�ֻ����ʹ�ڵ���4�η���Сʱ�������ĵ������dz���(������2.5��105 J)����������ͷ���Ϊ1��Ӳ��Լ������ʱ���ܺĴ������(�����ﵽ15��105 J)����ǰ�ߵ�6���ࡣ��Ȩ��ʽ(ͼ8(c)�ǽϺõ�������ʽ����Ȼ�ܺ��벻ʹ������ͷ�ʱ������������ӣ�����Ӳ��Լ��ʱ���ٺܶࡣ��һ����Ҳ��ͼ6��ͼ7��ʾ�Ĺ���һ�¡��ɼ�������3���ڵ㽫Ŀ��Χס����Ϊ1����Ŀ�꺯�������ܺ�ָ����м�Ȩ��������ۺ�����ָ�꺯����ָ����Ա��ѡ���ܴﵽ�ȼ�С�ܺ�����߾��ȵ�Ŀ�ģ��Ӷ�֤���˱����ۺ�����ָ�꺯���趨�ĺ����ԡ�
��2 ��ͬ���˵���Ա(Ŀ��1)
Table 2 Members of different clusters (target 1)
ͼ9��ʾ����ѡ2��ʱ��(��30��60ʱ��)����3��������Ŵ�������ÿ��������Ӧֵ�ı仯ͼ����ͼ9�ɼ������Ž������������ӣ�ÿ����������Ӧֵ�����������ƣ�ֱ���ҵ����ŵ�4���ڵ㣬��ʱ������Ӧֵ�ﵽ���������������һ������ͼ7�и������������������ٵĹ����������һ��֤���������Ŵ��㷨ѡ����Ա����Ч�ԣ�Ҳ֤���˷�������ѡ����Ա����ȷ�Ժ������ԡ�
6 ����
(1) ���ö�̬���˻��ƽ���Эͬ������䣬����������֯��̬���ˡ�����������������������ܺ�ģ�ͣ�������3�㶨λ��ԭ���������˶�λ���ȣ���������ģ�͡��ڴ˻����ϣ����ܺ�ģ���뾫��ģ�ͽ�ϣ�������ۺ�����ָ�꺯����ָ����Ա��ѡ����������Ŵ��㷨ʵ������Աѡ��
(2) �ڽ�һ���о������У��ɲ��ò�ͬ�Ķ�λ�����о���ν����������ľ���ģ�ͣ��ҽ�һ���Ż��ܺ�ģ�ͣ��Ի�ø��õ������ۺ����ܡ�
�ο����ף�
[1] CUI Li, JU Hai-ling, MIAO Yong, et al. Research development of wireless sensor networks[J]. Journal of Computer Research and Development, 2005, 42: 11-13.
[2] ������. ����������Ŀ�����ϵͳЭͬ��������о���Ӧ��[D]. ����: �廪��ѧ�Զ���ϵ, 2006: 1-5, 24-31.
WANG Yong-cai. Cooperative design of wireless sensor network target tracking system: A theoretical study and applications[D]. Beijing: Tsinghua University. Department of Automation, 2006: 1-5, 24-31.
[3] Tseng Y C, Kuo S P, Lee H W, et al. Location tracking in a wireless sensor network by mobile agents and its data fusion strategies[J]. The Computer Journal, 2004, 47(4): 448-460.
[4] Kaplan L M. Transmission range control during autonomous node selection for wireless sensor networks[C]//2004 IEEE Aerospace Conference Proceedings, 2004: 2072-2087.
[5] ZHU Jing-hua, GAO Hong. An energy efficient algorithm for task allocation in wireless sensor networks[J]. Journal of Software, 2007, 18(5): 1198-1207.
[6] �½�ϼ, 갴���, ���|, ��. ���ߴ��������綯̬Эͬ����������[J]. ��Ϣ�����, 2006, 35(2): 189-199.
CHEN Jian-xia, ZANG Chuan-zhi, LIANG Wei, et al. A dynamic task allocation scheme for wireless sensor networks[J]. Information and Control, 2006, 35(2): 189-199.
[7] �½�ϼ. ���ڶ�̬���˻��Ƶ����ߴ���������������������о�[D]. ����: �й���ѧԺ�����Զ����о���, 2009: 88-98.
CHEN Jian-xia. Research on task allocation in wireless sensor networks based on dynamic coalition mechanism[D]. Shenyang: Shenyang Institute of Automation Chinese Academy of Sciences, 2009: 88-98.
[8] ���, ����, ��Ȫ, ��. ���ߴ�����������Ϣ��֪�е�����֯�㷨[J]. �Զ���ѧ��, 2006(5): 829-833.
WANG Rui, LIANG Yan, PAN Quan, et al. A self-organization algorithm in wireless sensor net-works[J]. Acta Automatica Sinica, 2006(5): 829-833.
[9] Baek J, An S K, Fisher P. Dynamic cluster header selection and conditional re-clustering for wireless sensor networks[J]. Consumer Electronics, IEEE Transactions on, 2010, 56(4): 2249-2257.
[10] LI Hai-hao, LIU Mei, SHEN Yi, et al. Research on task allocation technique for multi-target tracking in wireless sensor network[C]//Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation, 2007: 360-365.
[11] ������. ���ߴ���������[M]. ����: �廪��ѧ������, 2005: 393-394.
SUN Li-ming. Wireless sensor networks[M]. Beijing: Tsinghua University Press, 2005: 393-394.
[12] He T, Huang C D, Blum B M, et al. Range-Free Localization Schemes in Large Scale Sensor Networks[C]//Proc of the 9th Annual Int��l Conf on Mobile Computing and Networking. San Diego: ACM Press, 2003: 81-95.
[13] ��ɯ. ���ߴ����������Ŀ�����ܸ����㷨�о�[D]. ����: �㶫��ҵ��ѧ�Զ���ѧԺ, 2010: 20-31.
WEN Sha. Multi-target intelligent tracking algorithm in wireless sensor network[D]. Guangzhou: Guangdong University of Technology. School of Automation, 2010: 20-31.
(�༭ ������)
�ո����ڣ�2011-08-29�������ڣ�2011-10-29
������Ŀ�����ҽ�������ʿ�����������Ŀ(200805330005)������ʡ�Ƽ��ƻ���Ŀ(2010FJ4029)
ͨ�����ߣ�������(1973-)��Ů�����ϳ�ɳ�ˣ���ʿ�������ڣ��������ߴ�������λ�����о����绰��15973113084��E-mail��wensha0103@163.com

