���ڶ���ģ�͵���ģ������Ӧ���Ƽ���������
�������ͳ��������֣������
(����������ѧ ��Ϣ��ѧ�뼼��ѧԺ��������100029)
ժҪ�����ȳ��������ģ������Ӧ����(MFAC)�߽�ģ���߿��Ƶ��ص㣬�Ƶ����ڶ��ס���ģ�͡��ĸĽ���ģ������Ӧ���Ʒ��������Ƶ�αƫ�����������ɵĵ�����ʽ�������һ��ģ�͵�MFAC������ȣ��Ľ����Կ���ʹÿ�ε����ķ�ģ����ȷ���Ӷ���һ����߿��ƾ��ȡ����ţ���ԸĽ�MFAC�IJ����������⣬��������Ż������Ŀ����������������������ñ�ʶ���Ľ���ģ����Բ�ͬ��Ŀ�꺯�������Ż���ʹ����ʵ�÷�Χ���ӹ㷺��ͨ����������ʵ��Աȿ��Կ���������Jeu-tr������ָ����в����Ż��ĸĽ�MFAC��������̬��Ӧ��ã����Ż������������١���ˣ�����Ч���õ��������ơ�
�ؼ��ʣ���ģ������Ӧ���ƣ�����ģ�ͣ������������ݶ��½��Ż�
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2012)05-1795-08
Model free adaptive control and parameter tuning based on
second order universal model
WANG Jing, JI Chao, CAO Liu-lin, JIN Qi-bing
(College of Information Science and Technology, Beijing University of Chemical Technology, Beijing 100029, China)
Abstract: An improved model free adaptive control (MFAC) based on second-order universal model was derived, which can greatly improve the model and control precision. The control law and pseudo-partial-derivative were iteratively derived. For the parameter tuning of improved MFAC, a parameter optimization algorithm was presented. Using the approximate identified model, the optimal controller parameters were obtained for several different objective functions, which had wide scope of application. The Jeu-tr performance index makes the system possess better dynamic response, and less iteration times. The simulation results show the effectiveness of improved MFAC control strategy and parameter tuning method.
Key words: model free adaptive control; second-order universal model; parameter tuning; gradient descent optimization algorithm
��ģ������Ӧ�����������������ض��������ѧģ�͵ġ���ģ�͡���ijЩ�����ƹ��ܡ�ģ����� ��[1-2]�����ñ߽�ģ�߿��Ƶķ�ʽ���õ��µĹ۲����ݺ��ٽ�ģ�ٿ��ƣ�ʹÿ�εõ��ġ���ģ�͡���ȷ���Ӷ�������������Ҳ��֮�õ����ơ���ģ������Ӧ������Ϊһ�ֲ������ڶ�����ѧģ�͵ļ���Ч�����й㷺�����Ե��Ƚ����Ʋ��ԣ��ںܶิ�ӹ��̿����еõ��ɹ�Ӧ��[3]�����Ƕ�����ͬ�Ŀ���ϵͳ���ԣ���ͬ�Ŀ������������õ��Ŀ���Ч����ȫ��ͬ���ر��ǵ����������ı�ʱ���������Խ�����һЩ�仯����ǰ�������������������Ӧ���ߵ������������¹ʵķ���[4]��ͬʱ���������Խ��ܼ��ŵ�Ҫ��ҲԽ��Խ�ߣ����ϺõĿ���Ч�����Դﵽ���ܼ��ŵ�Ŀ�ġ�Ҫ��ýϺõĿ���Ч��������Ҫ�ϺõĿ�������������ˣ��Ż������������Ƿdz���Ҫ�ġ����������������MFAC�еĹؼ����ء���ģ�͡����иĽ�����һ����չΪ���ס���ģ�͡���ʹ��ÿ�ε����õ��ġ���ģ�͡����Ӿ�ȷ���Ӷ������߿��ƾ��ȡ�Ȼ������ֽ���ģ������Ӧ���������в������������о����ٵ���״����������ڸĽ���ģ������Ӧ���ƵĻ����½��ݶȷ��IJ����Ż������㷨�������ò�ͬ������ָ����п��������������ͽ���Աȷ����о���
1 ���ڶ���ģ�͵ĸĽ���ģ������Ӧ���������
1.1 ���ס���ģ�͡�
����һ����ɢʱ�������ϵͳ��
 (1)
(1)
���� ��
�� �ֱ�Ϊϵͳ����������룻m��n�ֱ�Ϊϵͳ����[5]��
�ֱ�Ϊϵͳ����������룻m��n�ֱ�Ϊϵͳ����[5]��
���ȼ��裺
����1��ϵͳ(1)����������ɹ۲�ģ��ɿ��Ƶġ�������ijһϵͳһ���н����������ź� ������һ���н�Ŀ��п��������źţ�ʹ��ϵͳ�ڴ˿��������źŵ����������������ϵͳ�����������
������һ���н�Ŀ��п��������źţ�ʹ��ϵͳ�ڴ˿��������źŵ����������������ϵͳ�����������
����2�� ����ϵͳ��ǰ�Ŀ��������ź���ƫ�����������ġ�
����ϵͳ��ǰ�Ŀ��������ź���ƫ�����������ġ�
����3��ϵͳ(1)�ǹ���Lipsehitz�ģ������������ʱ�̵�k�� �У�
�У�
 ��
�� ����
���� (2)
(2)
���� ��
�� ��b��1������0�ij�����
��b��1������0�ij�����
�Է�����ϵͳ(1)������������ϼ�����������ô�� ��
�� ʱ��һ������αƫ����
ʱ��һ������αƫ���� ��
�� ��ʹ��ϵͳ��������ʽ��ʾ[6]��
��ʹ��ϵͳ��������ʽ��ʾ[6]��

 (3)
(3)
��дΪ��
 (4)
(4)
������b����c��
��ʽ(3)Ϊϵͳ(1)�Ķ��ס���ģ�͡�(Second-order universal model)��������֪��ϵͳ��ǰʱ�̵���������뵱ǰʱ�̵������йأ���������ǰʱ�̵�������أ���ˣ���������ģ�͵�������Դ������㷺��ϵͳ��Ϣ��
1.2 ���ڶ��ס���ģ�͡���ģ������Ӧ���ƹ���
1.2.1 ���ƹ��ɵ���
�������µĿ�������������
 (5)
(5)
���У� ��Ȩ�����ӣ���
��Ȩ�����ӣ��� ʱ�̵ĸ���ֵ��
ʱ�̵ĸ���ֵ�� �����룬ʹ�ÿ����������ı仯�ܵ�Լ�������ܿ˷���̬��������ʽ(3)����ʽ(5)������������Ϊ0���ã�
�����룬ʹ�ÿ����������ı仯�ܵ�Լ�������ܿ˷���̬��������ʽ(3)����ʽ(5)������������Ϊ0���ã�



�����½��ݶȷ����ã�

 (6)
(6)
������k (0����k��2)�Dz�������[6]��
�ӿ������㷨(6)���Կ������������ϵͳ���ܿ�ϵͳ������ѧģ�ͽṹ��ϵͳ�����أ�����ϵͳI/O�������[7]��
1.2.2 αƫ��������
��ͳ�IJ�����������Ӧ���Ǽ�С��ϵͳģ�������ϵͳ��ʵ���֮���ƽ����Ȼ����Ӧ�ô��������Ƶ����IJ��������㷨�ڹ��Ʋ���ʱ��������Ĺ���ֵ�����仯̫�죬���߾��Ƕ�ijЩͻ��ĸ����ĸ��Ź������У�Ϊ�ˣ���������µIJ�������������


 (7)
(7)
���У�Ϊkʱ��ϵͳ������� ��
�� ΪȨ�����ӡ��ֱ�������������0���õ�ƫα�������ƣ�
ΪȨ�����ӡ��ֱ�������������0���õ�ƫα�������ƣ�

 (8)
(8)
 (9)
(9)
���� ��
�� Ϊ�������С�
Ϊ�������С�
2 ���ס���ģ�͡���ģ�Ϳ�������������
�����ģ������Ӧ�����������϶ࡢ���õ����ʲ������ص㣬���������п������������������ȣ����ס���ģ�͡���ģ������Ӧ�������Ŀɵ�����Ϊ ��
�� ��������������������ʵ�����������ʵ�鷢�֣����������Կ�����Ӱ���С����ˣ������������ص����������������ڶ��ס���ģ�͡����������ų��֣�����ʽ(6)��֪������(0, 2)֮��ȡ����ֻҪ���ı�ֵһ������ϵͳ��Ӱ�첢�����ԡ���ˣ������������ס���ģ�͡���ģ�Ϳ��������������ĺ����������Ż���
��������������������ʵ�����������ʵ�鷢�֣����������Կ�����Ӱ���С����ˣ������������ص����������������ڶ��ס���ģ�͡����������ų��֣�����ʽ(6)��֪������(0, 2)֮��ȡ����ֻҪ���ı�ֵһ������ϵͳ��Ӱ�첢�����ԡ���ˣ������������ס���ģ�͡���ģ�Ϳ��������������ĺ����������Ż���
�����Ż��㷨��Ҫ�����������ݶԱ��ض����ʶ��һ����ģ�ͣ���ģ��ֻ�DZ��ض���Ľ��ƣ��ڴ˶��κθ߽��Ӷ����ʹ�ö��Ӵ��ͺ�ģ�ͽ��ƣ����ڲ�������Ч����δ���ʶ���ϴ���� ���˴�ʱ��ϵͳ��ʶ����Υ����ģ�Ϳ��Ƶ���ּ�����������ж���ϵͳ��ʶ������Ϊ�����Դ��ͺ����

 (10)
(10)
ʽ�У���Ϊ���ͺ�ʱ�䡣
��ͳ�IJ����Ż��㷨�Ƚϼ�[8]������ԭ�����������⣬ʹ�������ȽϷ��㣬�������������ڱȽϸ��ӵı��ض���ͳ������������ʹ�á���ˣ���Ҫѡ��һ���Ż����ȸ��ҿ��������ڽ�Ϊ���ӵı��ض���IJ����Ż��㷨�����ݶ��½������Ժܺõ���������Ҫ��
2.1 ����ָ���ѡȡ
���ס���ģ�͡���ģ������Ӧ�������IJ����Ż�����Ѱ�Һ��ʵĿ�������������ʹ�ڹ��������仯��ʱ��ϵͳ�Ծ��н�С�ij��������Ͽ����Ӧ�ٶȺͽϸߵĿ��ƾ��ȡ���������Ҫ��ͬ�������Ż�ʱ�����õ�Ŀ�꺯��Ҳ����ͬ��
2.1.1 ISEϵ��Ŀ�꺯��
����PID���������������㷨��Zhuang��[9]�������������Ϊ��
 (11)
(11)
ʽ�У� Ϊ���������������źţ�
Ϊ���������������źţ� Ϊ�������������ɵļ��ϡ����������п�����3��n��ȡֵ����n=0��1��2����n=0ʱ��Ϊ���ƽ��(ISE)��n=1ʱ��Ϊʱ���Ȩ�����ƽ������(ISTE)��n=2ʱ��Ϊʱ��ƽ����Ȩ�����ƽ������(ISTTE) ��[10]��
Ϊ�������������ɵļ��ϡ����������п�����3��n��ȡֵ����n=0��1��2����n=0ʱ��Ϊ���ƽ��(ISE)��n=1ʱ��Ϊʱ���Ȩ�����ƽ������(ISTE)��n=2ʱ��Ϊʱ��ƽ����Ȩ�����ƽ������(ISTTE) ��[10]��
�������n=0ʱ�������ݶ��½������Ż��㷨�����Ƶ���
���ȣ�������ָ��(11)ת������ɢ��ʽ������
 (12)
(12)
���ո���ʽ(6)��(10)��(12)�������õ�����ISE����ָ����ݶ��½��������Ż��㷨��


 (13)
(13)
2.1.2 IAEϵ��Ŀ�꺯��
����ʹ�õĻ���������ֵ����(IAE)�Լ�������ֵ��ʱ��˻��Ļ���(ITAE)��СΪĿ��ĵ��ڹ���[11]�������ʽ�ֱ���ʽ(14)��ʽ(15)��ʾ��
 (14)
(14)
 (15)
(15)
������ISE����ָ���Ż��㷨���Ƶ����̣����Եõ�����IAE����ָ����ݶ��½��������Ż��㷨��

(16)
2.1.3 JeuĿ�꺯��
�������������ۺ�����ָ�꣬������Ӧ�ٶȡ��ȶ��Ժͳ�������Щָ�ꡣ��ʹ�������ȽϷ��㣬���������������ijһ����ָ���Ҫ��ϸߣ����磺Ҫ���������С����ֵʱ����̡�����ʱ����̵ȣ���������ʽ����ʵ�֡���ˣ���������Ŀ�꺯��[12]��
Ϊ�˻������Ĺ������ܺͶ�̬���ԣ��������ƽ����������ָ����Ϊ�����Ż���Ŀ�꺯����ͬʱΪ�˱��ⳬ����������Ŀ�꺯���м����˿����������ƽ���Ŀ�꺯��Ϊ��
 (17)
(17)
ʽ�У�e(t)Ϊϵͳ��u(t)Ϊ������������� ��
�� ΪȨֵ��������Ż��㷨Ϊ��
ΪȨֵ��������Ż��㷨Ϊ��





 (18)
(18)
���⣬Ҳ����������ָ��(17)�Ļ����ϼ���Գ�����d������ʱ��tr��Լ������������
 st. tr and mind (19)
st. tr and mind (19)
2.2 �Ľ���ģ�Ϳ��ƵIJ��������㷨ʵ��
�����ݶ��½����Զ��ס���ģ�͡���ģ������Ӧ�������IJ�������˼·���£�
(1) �����������ݶԱ��ض����ʶ��1����ģ�ͣ�
(2) ���ݿ���Ҫ��ѡȡ�����Ż�������ָ�ꣻ
(3) ������������������Ŀ��������������趨��
(4) ����ʽ(6)��֪��ѡȡ��ΧΪ(0, 2)����ˣ��ڲ�������ʱ���ڸ÷�Χ��ѡ���ʼֵ��
(5) ��������ָ��ļ������õ� ��
��
(6) �����½��ݶȷ������е�������
 (20)
(20)
���У�  (JΪĿ�꺯��)��
(JΪĿ�꺯��)��
(7) �ж��Ƿ���������ָ��Ҫ�������㣬�����������������û�ﵽҪ������ת����5������ ������
����(5)~(7)��Ϊ�����ݶ��½������ж��ס���ģ�͡���ģ�Ϳ��Ʋ����Ż��IJ��裬��ͼ1��ʾ��
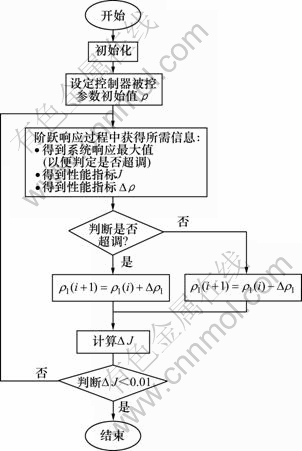
ͼ1 �ݶ��½��������Ż�����ͼ
Fig.1 Flow chart of parameter optimization of gradient descent method
3 �����о�
�������ˮ��������Դ��ͺ����Ϊ[13]��
 (21)
(21)
���У���̬����K=5������ʱ�䳣��T=3�����ͺ�ʱ�� =60��
=60��
3.1 ���ס���ģ�͡���ģ������Ӧ���Ʒ����о�
��ʽ(6)���Կ������������Ǽ�����ģ������Ӧ�������Ŀ������ã�ʹ�ÿ�������������ȶ��� ȷ��
���������

�Ľ���ģ������Ӧ���������Ʋ���Ϊ��
=0.003 5��=0.35����=2����=2����=0.1��
MFAC���Ʋ�����=0.002 8(�������ͬ���ס���ģ�͡���ģ������Ӧ������)���������˵�����������ϴ���Ϊ��ʽ(6)��֪��
 �����ס���ģ�͡���ģ������Ӧ��������MFAC���Ʒ�����ϵͳ��Ӧ���߶Ա���ͼ2��ʾ��
�����ס���ģ�͡���ģ������Ӧ��������MFAC���Ʒ�����ϵͳ��Ӧ���߶Ա���ͼ2��ʾ��

ͼ2 �Ľ�MFAC�볣��MFAC��Ӧ���߶Ա�
Fig.2 Comparison of improved MFAC and MFAC
��ͼ2��֪�����ס���ģ�͡���ģ������Ӧ�����㷨��MFAC�ĵ���ʱ��ֱ�Ϊ326 s��523 s���������ֱ�Ϊ1.40%��0.14%��������ʱ��ֱ�Ϊ216 s��300 s�����Կ�������2�ֿ��Ʒ����У����ס���ģ�͡���ģ������Ӧ�������ĵ���ʱ����̣����MFAC���200 s�����ܳ�������MFAC���Դ��������ϵͳ���Ҫ��(2%)������ʱ��Ҳ�Ͽ죬������1 000 sʱ�������ض������Է����˸ı�ʱ�����ס���ģ�͡���ģ������Ӧ�����㷨�������ȵ�������ֵ̬��������������ˣ����ס���ģ�͡���ģ������Ӧ���ƾ��нϺõ�³���ԺͽϿ����Ӧ�ٶȡ�
3.2 ���ס���ģ�͡���ģ������Ӧ���Ʋ����Ż��ķ����о�
�����Ż��㷨��Ҫ�����������ݶԱ��ض����ʶ��һ����ģ�ͣ���ͼ3��ʾ�����Կ���ʵ�ʶ������ʶ���Ľ��ƶ������ܴ�ʵ�ʶ������ʶ����Ա����¡�
ʵ�ʶ��� ��
��
��ʶ����
���ݱ�ʶ������Կ�������ʶ���ı��ض��������ʵ�ʶ���ƫ��ܴ����˵���ڶ��ס���ģ�͡���ģ�Ϳ������IJ��������б�ʶ������Ҫ�ϸߵľ��ȣ��������üĶ��״��ͺ���ɶ����и߽ױ��ض�����ƣ����÷�Χ�㡣���������ݱ�ʶ���Ķ����������Ż��㷨��ʵ�����״��ͺ������п����������Ż���

ͼ3 ʵ�ʶ������ʶ����Ľ�Ծ��Ӧ����
Fig.3 Step response for real and identified objective
3.2.1 ISEϵ��Ŀ�꺯�������Ż�����
�����½��ݶȷ�Ϊ�Ż��㷨������ʽ(11)ΪĿ�꺯���Զ��ס���ģ�͡���ģ������Ӧ���������в����Ż����Ż������ͼ4��ʾ������������1��ʾ��
��n=0ʱ����Ȩ�������ڳ�ʼֵ=0.01ʱ������ϵͳ���н϶̵�����ʱ�䣬�������ϴ���ʵ��ϵͳ����������ƫ��С�����������࣬����ʱ�䳤��ϵͳ�ȶ�ԣ��ƫС��ȱ�㣻��nΪ1��2ʱ���ٿ��Ǵ����ʼ������Ȩ����ɹ��̺��ڳ��ֵ����нϺõ�ѡ���ԣ���ӳϵͳ�Ŀ����Ժ;�ȷ�ԣ���Ƚ϶��ԣ�ISTE���Ż�Ч����á�
3.2.2 IAEϵ��Ŀ�꺯�������Ż�����
����Ŀ�꺯��ʽ(14)��(15)�Զ��ס���ģ�͡���ģ������Ӧ���������в����Ż����Ż�����Ч����ͼ5��ʾ���Ż��������������ղ���������2��ʾ��

ͼ4 Ŀ�꺯���ֱ�ΪISE��ISTE��ISTTE�IJ����Ż�Ч��
Fig.4 Comparison of ISE, ISTE and ISTTE parameter optimization effects
��1 ISEϵ��Ŀ�꺯�������Ż�Ч���Ա�
Table 1 Results of ISE, ISTE and ISTTE parameter optimization

��2 IAEϵ��Ŀ�꺯�������Ż�Ч���Ա�
Table 2 Results of IAE and ITAE parameter optimization

IAE�����е�������ʽ(11)����ͬ��ITAE�����нϴ�ͬ����ͼ5���Կ���������ʼ����=0.01ʱ�����ߵ��Ż�Ч����û�����Բ��죬������ʼֵΪ=0.001ʱ��ITAE�Ż����IJ������Ա�IAE�ĺá�ITAE�Ըտ�ʼ�����Ҫ��Ƚϵͣ�������Ӧ���������ֵ����Ҫ��Ƚϸߡ��������˿���ϵͳ��Ҫ��Ŀ����Ժ;�ȷ�Ե�Ʒ�ʡ���ˣ����������Ż������������еõ�Ӧ�á�
3.2.3 �Ա��ܽ�
����������Ŀ�꺯�����Ż�Ч����õļ�������ָ����жԱȣ��Ա�õ����Ŀ�꺯����
���ȣ�ͨ�����½��ݶȷ������Ż��ķ�����Կ������ڱ�ʶģ����ʵ��ģ�����ϴ������£��Կ��Խ����ס���ģ�͡���ģ������Ӧ�����������������Ϻõij̶ȣ�֤�����Ż��㷨����ֻ���ö��״��ͺ�ģ�ͣ�������Ż��κθ߽��ӵ���ʵ�����н�ǿ��ʵ���ԡ�
��ͼ6����3���Կ�����ISTEĿ�꺯����Ҫ�Խϴ�������͡��Դ�ΪĿ�꺯�������������Ʋ�������Ӧ���ߣ����п��ٵ������ٶȣ���Ҫ�϶̵�����ʱ�䡣���ǣ��������Ƚϴ��ȶ�����Ҫ��ʱ��Ƚϳ�������������ν�С��ƫ��������ȶ�����ˣ����ܺܺ�������Ƶ�Ҫ��
��ITAEĿ�꺯�������ISTE��˵���Ż�Ч����ԽϺã��ȶ��Ը���һЩ�����ǣ�����ڴ�Լ��������Jeu���ȶ���������Զ��������Jeu����ָ��Ļ�����������Լ��������������dС��1%������ʱ��tr��300 s������ʽ(19)��ʾ������Jeu-tr��ָ���Ӧ���Ż������������٣�����ʵ������١���ˣ�Ϊ�������ۺϿ������ܵ�Ҫ��ѡ��Jeu-tr��ΪĿ�꺯������ģ������Ӧ���������в����Ż��ܵõ���õĽ����

ͼ5 Ŀ�꺯���ֱ�ΪIAE��ITAE�IJ����Ż�Ч��
Fig.5 Comparison of IAE and ITAE parameter optimization effects

ͼ6 Ŀ�꺯���ֱ�ΪISTE��Jeu-tr��ITAE�IJ����Ż�Ч��
Fig.6 Comparison of ISTE, Jeu-tr and ITAE parameter optimization effects
��3 Ŀ�꺯�������Ż�Ч���Ա�
Table 3 Results of ISTE, Jeu-tr and ITAE parameter optimization

4 ����
(1) ���Ļ�����ģ������Ӧ�����С���ģ�͡��ĸ������߿��ƹ����С���ģ�͡����ȵĽǶȳ���������˶��ס���ģ�͡���������˻��ڶ��ס���ģ�͡�����ģ������Ӧ����(Second order universal MFAC)�㷨�����Ƶ��˿������ͷ�ģ�͵ĵ�����ⷽ�̡��볣����ģ������Ӧ���ƱȽϵķ������������÷������нϿ����Ӧ�ٶȣ����ҶԹ��̶���������㶯���н�ǿ��³���ԡ�
(2) Ϊ�˽���Ľ���ģ������Ӧ�����������������⣬������½��ݶȲ����Ż��㷨����Բ�ͬ���͵�Ŀ�꺯�����в����Ż���������˵���˸ò����Ż��㷨����Ч�ԣ����ô�Լ�����������ƽ������������ƽ����Ȩ(Jeu)ΪĿ��õ��IJ�������Ч����ѣ����˶��ס���ģ�͡�MFAC�IJ���������
�ο����ף�
[1] ��־��. ��ģ�Ϳ�����������Ӧ�õĽ�չ[J]. �Զ���������Ӧ��, 2004, 23(2): 34-37.
HAN Zhi-gang. The progress of theory and application of model free controller[J]. Techniques of Automation and Applications, 2004, 23(2): 34-37.
[2] Hou Z S, Huang W H. The model-free learning adaptive control of a class of SISO nonlinear systems[C]//Proceedings of the American Control Conference. New Mexico, l997: 343-344.
[3] Tan K K, Lim S Y, Lee T H, et al. Adaptive predictive control of a class of SISO nonlinear systems[J]. Dynamics and Control, 2001, 1l(2): 151-174.
[4] ���IJ�. ��¯����ϵͳ��Ƽ�����PCS7�ϵ�ʵ��[D]. ����: ����������ѧ��Ϣ��ѧ�뼼��ѧԺ, 2010: 23-24.
LI Wen-bo. Design of control system of boiler and realization based on PCS7[D]. Beijing: Beijing University of Chemical Technology. College of Information Science and Technology, 2010: 23-24.
[5] ����, ��ѩ, ��С��, ��. ���е����������������ģ������Ӧ����[J]. �����DZ�ѧ��, 2009, 30(6): 204-208.
MA Yan, CHEN Xue, XIE Xiao-hua, et al. Research on MFA control algorithm with tracking differentiator[J]. Chinese Journal of Scientific Instrument, 2009, 30(6): 204-208.
[6] ������. �Dz���ģ�ͼ�������Ӧ��������[M]. ����: ��ѧ�����, 1999: 117-163.
HOU Zhong-sheng. Non-parameter model and adaptive control theory[M]. Beijing: Science Press, 1999: 117-163.
[7] Cheng G S. Model-free adaptive control[J]. IEEE Computing and Engineering, 2004, 1(3): 28-33.
[8] �ܱ���, �콨Ծ, ������, ��. ���̿���ϵͳ��PID�����������Ż����о�[J]. ��Դ����, 2001, 22(5): 194-197.
ZHOU Bao-lin, ZHU Jian-yue, CAI Ning-sheng, et al. A study on parameter optimization of PID controller in process control system[J]. Energy Technology, 2001, 22(5): 194-197.
[9] Zhuang M, Atherton D P. Automatic tuning of optimum PID controllers[J]. Control Theory and Applications, IEE Proceedings D, 1993, 140(6): 216-224.
[10] Zhuang M, Atherton D P. Tuning PID controllers with integral performance criteria[C]//International Conference on CONTROL & Institution of Electrical Engineers Computing and Control Division. Proceedings of IEE Conference on Control. London: IEE, 1991: 481-486.
[11] ���, ���, Ѧ����. ����ITAEָ���PID�������������Ƚ��о�[J]. �й��������ѧ��, 2003, 23(8): 206-210.
XU Feng, LI Dong-hai, XUE Ya-li. Comparing and optimum seeking of PID tuning methods base on ITAE index[J]. Proceedings of the CSEE, 2003, 23(8): 206-210.
[12] ��ΰ��, �챣��, ������. ���ڸĽ�����Ⱥ�㷨��PID�����Ż������о�[J]. ���������, 2005, 31(24): 41-43.
XIONG Wei-li, XU Bao-guo, ZHOU Qi-ming. Study on optimization of PID parameter based on improved PSO[J]. Computer Engineering, 2005, 31(24): 41-43.
[13] ����̩, ������. һ������Դ��ͺ�ϵͳ�ĸĽ���ģ������Ӧ����[J]. ����������Ӧ��, 2008, 25(4): 623-626.
JIN Shan-tai, HOU Zhong-sheng. An improved model-free adaptive control for a class of nonlinear large-lag systems[J]. Control Theory & Applications, 2008, 25(4): 623-626.
(�༭ ����ƽ)
�ո����ڣ�2011-05-17�������ڣ�2011-10-10
������Ŀ��������Ȼ��ѧ����������Ŀ(61174128��60974031)�������У��������ҵ���������Ŀ(ZZ1223)
ͨ�����ߣ�����(1972-)��Ů���ӱ���ɽ�ˣ���ʿ�����ڣ����¸��ӹ�ҵϵͳ��ģ���Ƚ����ơ����ܿ��Ƶ��о����绰��13693674108��E-mail: jwang@mail.buct.edu.cn

