用专家系统方法寻找机器人无碰撞路径
来源期刊:中南大学学报(自然科学版)1988年第2期
论文作者:蔡自兴
文章页码:204 - 211
关键词:机器人; 轨迹; 规划; 碰撞; 通道; 决策规划; 知识; 数据库/专家系统; 知识库
Key words:robots; path; planning; collision avoidancee; channels; decision rules; knowledge; data libraries/expert system; knowledge base
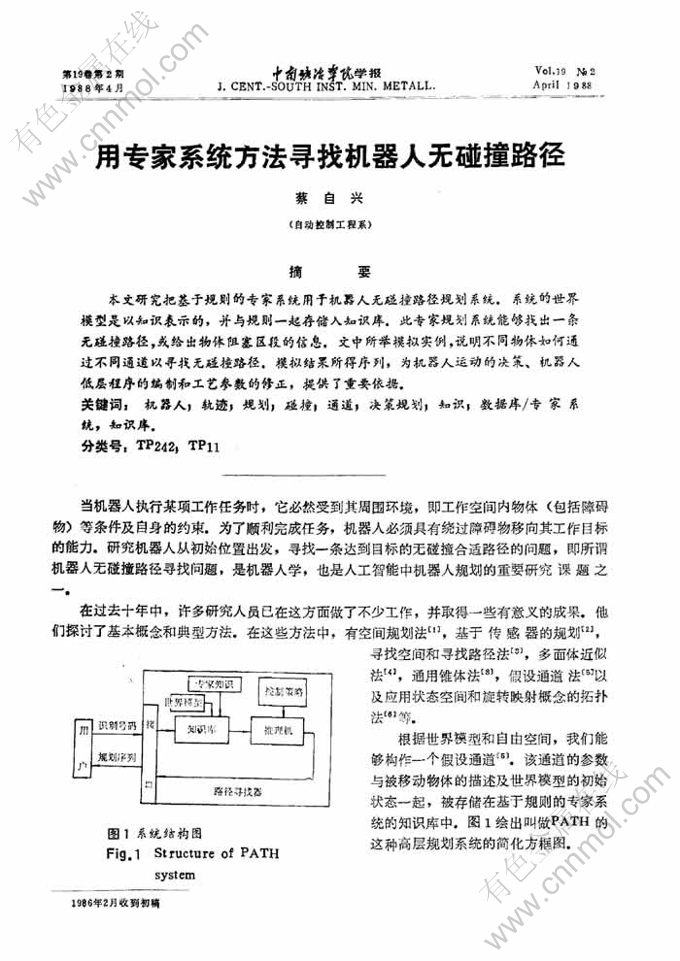
摘 要:本文研究把基于规则的专家系统用于机器人无碰撞路径规划系统。系统的世界模型是以知识表示的,并与规则一起存储入知识库。此专家规划系统能够找出一条无碰撞路径,或给出物体阻塞区段的信息。文中所举模拟实例,说明不同物体如何通过不同通道以寻找无碰撞路径。模拟结果所得序列,为机器人运动的决策、机器人低层程序的编制和工艺参数的修正,提供了重要依据。
Abstract: A rule-based expert system has been developed and used to a robotic planningsystem with collision-avoidance.The world model is represented as theknowledge data and stored in the knowledge base with rules.The expert system can finda collision-avoidance path.Otherwise,it shows the collision section in which the movedobject is bloked.Several examples for the different objects to pass through thedifferent channels and to find a collision-avoidance path have been tested.The simula-ting results of the planner give out the planning sequence or blocked section(s).Theoutput information is useful for making decision of the robot motion and modify-ing the technological parameters of the world.