DOI: 10.11817/j.issn.1672-7207.2016.11.017
基于轨迹线性化的鲁棒制导控制一体化设计
黄长强,蚩军祥,黄汉桥,周欢
(空军工程大学 航空航天工程学院,陕西 西安,710038)
摘要:针对无人作战飞机末端攻击制导控制一体化设计问题进行研究。建立一体化制导与控制系统模型,在此基础上采用轨迹线性化控制方法设计一体化控制律,为处理系统中存在的气动参数摄动、测量误差干扰和目标机动等大量不确定性,采用非线性干扰观测器技术对不确定性进行估计并加以补偿,并基于Lyapunov原理证明所设计方法的稳定性。仿真结果表明:所设计的制导控制一体化方法有效地提高控制精度,并保证良好的鲁棒性。
关键词:轨迹线性化控制;制导控制一体化;非线性干扰观测器;鲁棒性
中图分类号:V448 文献标志码:A 文章编号:1672-7207(2016)11-3735-07
Robust, integrated guidance and control based on trajectory linearization control
HUANG Changqiang, CHI Junxiang, HUANG Hanqiao, ZHOU Huan
(Aeronautics and Astronautics Engineering College, Air Force Engineering University, Xi’an 710038, China)
Abstract: The integrated guidance and control(IGC) design for unmanned combat aircrafts terminal attack was investigated. The IGC system model was established, and an IGC law was designed by the trajectory linearization control(TLC) method. In order to deal with high uncertainties, such as aerodynamic parameter perturbation, measurement error interference, target maneuver, and so on, a nonlinear disturbance observer(NDO) was employed to estimate and compensate for the uncertainties. By using the Lyapunov theorem, the stability of the designed method was proved. Simulation results demonstrate the superiority and effectiveness of the designed IGC method in the aspects of guidance accuracy and system robustness.
Key words: trajectory linearization control(TLC); integrated guidance and control(IGC); nonlinear disturbance observer(NDO); robustness
对于无人飞行器,传统的制导与控制系统设计思想是对制导系统与控制系统分别进行设计,然后将控制回路嵌入到制导回路[1]。这种方法被证明是有效的,其本质是基于串级控制系统频谱分离的假设[2]。然而在无人作战飞机攻击末段,随着弹目相对距离的减小,制导回路的时间常数变小,带宽随之变大,此时频谱分离的假设将不再成立[3],若采用传统方法设计制导控制系统,往往会导致脱靶量大和飞行失稳等问题。制导控制一体化(IGC)[4]设计不再区分制导回路和控制回路,而是将他们作为一个整体考虑。根据相对运动信息与无人作战飞机自身的运动信息直接产生舵偏指令,这样既能避免失稳现象,又能大大提高制导精度。自WILLIAMS等[5]提出IGC这一概念以来,国内外学者研究出多种设计方法,主要包括:最优控制方法[6]、微分几何控制方法[7]、Backsteppin方法[8]、动态逆控制方法[9]、变结构控制方法[3, 10-11]、状态子空间镇定方法[12]等。但上述方法存在以下不足:最优控制的解析解问题;Backstepping的计算膨胀和参数设定问题;动态逆方法对建模误差的敏感性问题;变结构控制方法自身的抖振问题等。为此,轨迹线性化控制(TLC)[13]作为一种新颖有效的非线性跟踪和解耦控制方法,越来越多地被应用到新型导弹、无人机的飞行控制系统中。TLC方法是ZHU[14]在微分代数谱理论基础上发展起来的一种新型非线性控制方法,该方法可视为理想的增益调参方法,物理意义明确,葛辉等[15]利用微分方程奇异摄动理论中的时标分离思想,研究了全驱动自主式水下航行器(AUV)的TLC,姚从潮等[16]将非线性动态逆与TLC相结合,实现了一种高超音速飞行器的轨迹线性化控制。但TLC方法设计面临着两大难题:IGC系统高阶数和系统存在大量不确定性[4]。因此,朱亮等[17]将单隐层神经网络与TLC相结合,提高了控制器的鲁棒性与跟踪性能,孙国强等[18]提出用神经网络在线、自适应地消除动态逆控制系统中的逆误差,提高了歼击机控制系统的鲁棒性。张晓宇等[19]利用模糊神经网络补偿动态逆控制系统的逆误差,可以有效地抑制拦截弹气动参数摄动而引起的控制系统性能的下降。本文作者以TLC方法为基础,对某型无人作战飞机俯冲攻击段俯仰通道的IGC进行设计。首先建立合理的IGC系统模型,然后根据TLC设计思想,定义了跟踪误差方程,并在此基础上设计闭环控制律,为处理系统中存在的气动系数摄动、测量误差干扰、目标机动等非线性不确定因素,引入非线性干扰观测器(NDO)技术进行估计和补偿,最后进行了末端攻击过程的数值仿真。仿真结果表明,所提IGC设计方法能显著提高制导控制精度,同时保证系统具有良好的鲁棒性。
1 IGC系统模型
1.1 相对运动关系
在无人作战飞机末端攻击段,假设无人机与目标已处于同一纵向平面内,为了说明IGC的设计方法,以俯仰通道为例进行推导。图1给出了俯仰攻击平面的相对运动关系。图1中:R为无人机与目标相对距离,Vu和Vt为无人机、目标的运动速度; 和
和 分别为无人机、目标的速度矢量与基准线之间的夹角;q为视线角。由图可得无人机与目标之间的相对运动方程组:
分别为无人机、目标的速度矢量与基准线之间的夹角;q为视线角。由图可得无人机与目标之间的相对运动方程组:

图1 无人作战飞机与目标的运动关系
Fig. 1 Motion relationship of UCAV and target
 (1)
(1)
令 ,
, ,代入式(1)并分别将2个方程左右两边对时间t求一阶导数得
,代入式(1)并分别将2个方程左右两边对时间t求一阶导数得
 (2)
(2)
式中:
 ,
, ,
,
 ,
,
 ,
,
 ,
,
 .
.
其中: 和
和 分别为目标加速度和无人机加速度在视线方向上的分量;
分别为目标加速度和无人机加速度在视线方向上的分量; 和
和 分别为目标加速度和无人机加速度在视线法向上的分量。
分别为目标加速度和无人机加速度在视线法向上的分量。
将 和
和 代入式(2)的第2式得
代入式(2)的第2式得
 (3)
(3)
当无人机速度方向与视线方向夹角不大时, 成立,au为无人机的法向加速度。因此式(3)可近似为
成立,au为无人机的法向加速度。因此式(3)可近似为
 (4)
(4)
式中: .
.
1.2 俯仰通道数学模型
考虑到系统的不确定性和非线性因素,给出某型无人作战飞机俯仰通道控制系统的数学模型。
 (5)
(5)
 (6)
(6)
 (7)
(7)
式中: 为攻角;
为攻角; 为俯仰角速率;
为俯仰角速率; 为升降舵舵偏角;Q为动压;S为特征面积;L为特征长度;m为无人机质量;Jz为绕z轴转动惯量;P为发动机推力;v为无人机速度;
为升降舵舵偏角;Q为动压;S为特征面积;L为特征长度;m为无人机质量;Jz为绕z轴转动惯量;P为发动机推力;v为无人机速度; 为升力相对于攻角的偏导数;
为升力相对于攻角的偏导数; ,
, 和
和 分别为量纲为一的俯仰力矩相对于俯仰角速率、攻角、俯仰舵偏角的偏导数;
分别为量纲为一的俯仰力矩相对于俯仰角速率、攻角、俯仰舵偏角的偏导数; 和
和 为有界未知的不确定项。
为有界未知的不确定项。
1.3 俯仰通道IGC模型
将式(7)代入式(4)并结合式(5)和(6),取:
 ,
,

则可得俯仰通道IGC状态空间模型:
 (8)
(8)
式中:x为系统状态;u为系统输入;y为系统输出; ,
, 表示未知不确定项系数。
表示未知不确定项系数。
2 鲁棒IGC设计
本节基于TLC对IGC控制律进行设计,并引入NDO技术来消除系统未知干扰和未建模动态等非线性不确定因素的影响,提高整个系统的鲁棒性能。控制结构如图2所示。
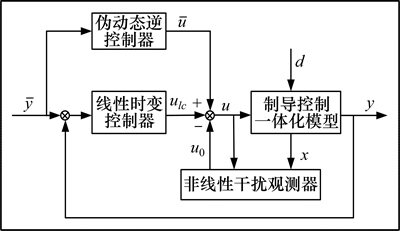
图2 IGC结构框图
Fig. 2 Structure frame of integrated guidance and control
2.1 基于TLC的IGC控制律设计
对于式(8),假设存在非线性函数 ,使匹配条件
,使匹配条件 成立。
成立。
首先令 ,根据TLC方法的设计思想[20],定义标称的系统状态
,根据TLC方法的设计思想[20],定义标称的系统状态 、输入
、输入 和输出
和输出 ,其满足:
,其满足:
 (9)
(9)
由于 广义可逆,因此容易求得标称输入为
广义可逆,因此容易求得标称输入为
 (10)
(10)
为了保证系统的因果性, 将由经过如下伪微分器求得
将由经过如下伪微分器求得
 (11)
(11)
定义状态跟踪误差 ,跟踪误差控制量
,跟踪误差控制量 ,则系统的跟踪误差控制方程可描述为
,则系统的跟踪误差控制方程可描述为


 (12)
(12)
考虑到和可视为系统的时变参数,式(12)可简记为
 (13)
(13)
因此,可将式(13)沿着标称轨迹 线性化得
线性化得
 (14)
(14)
式中: ,
,
 。
。
由式(9),(13)和(14)可以推导出如下结论。
结论1  为式(13)的孤立平衡点,
为式(13)的孤立平衡点, ,
, 连续可微,雅可比阵
连续可微,雅可比阵 有界,且在D上是Lipschitz的,对t一致。
有界,且在D上是Lipschitz的,对t一致。
结论2 式(14)中的 完全可控。
完全可控。
针对式(14),利用线性时变系统PD谱理论[21]设计状态反馈控制律:
 (15)
(15)
从而可得到闭环跟踪误差方程为:
 (16)
(16)
式(16)的第1式在平衡点 指数稳定。根据文献[22]中定理4.13可知:控制律式
指数稳定。根据文献[22]中定理4.13可知:控制律式 亦可保证非线性系统式(13)在平衡点指数稳定。
亦可保证非线性系统式(13)在平衡点指数稳定。
2.2 IGC鲁棒性设计
2.1节中推导是在假设的前提下进行的,但是在实际中d不可能为0。根据扰动系统理论,当模型误差 较小时,TLC控制律可以保证跟踪误差有界。但当逐渐增大时,TLC控制性能将降低甚至失效。对于某型无人作战飞机,由于飞行速度慢、机动性强,容易产生气动参数扰动、测量误差等,因此干扰项d不可忽略,此时采用NDO进行估计和补偿。
较小时,TLC控制律可以保证跟踪误差有界。但当逐渐增大时,TLC控制性能将降低甚至失效。对于某型无人作战飞机,由于飞行速度慢、机动性强,容易产生气动参数扰动、测量误差等,因此干扰项d不可忽略,此时采用NDO进行估计和补偿。
当 时,式(13)可改写为
时,式(13)可改写为
 (17)
(17)
为了克服d的影响,采用如下设计策略:
 (18)
(18)
u0根据NDO输出设计:
 (19)
(19)
式中: 为d的估计。
为d的估计。
由于,则式(13)可写为
 (20)
(20)
因此需要利用 估计并抵消不确定因素d的影响,从而提高控制性能。
估计并抵消不确定因素d的影响,从而提高控制性能。
考虑如下NDO:
 (21)
(21)
式中: 为NDO内部状态,
为NDO内部状态, 为待设计的非线性函数,
为待设计的非线性函数, 表示NDO增益,且满足
表示NDO增益,且满足 。
。
定义观测误差为
 (22)
(22)
由于缺乏d的先验知识,不妨假设 成立,其含义是相对于NDO动态来说,未知干扰变化较慢。因此,NDO误差动态特性为
成立,其含义是相对于NDO动态来说,未知干扰变化较慢。因此,NDO误差动态特性为
 (23)
(23)
联立式(8),(21)和(22),并代入式(23)可得
 (24)
(24)
由于,若选择 使得
使得 对于任意
对于任意 全局指数稳定,那么可以按指数形式逼近d。
全局指数稳定,那么可以按指数形式逼近d。
2.3 鲁棒IGC设计方法的稳定性分析
为便于稳定性分析,首先给出如下引理。
引理1 [23] 对n维连续时间线性时变系统:
 ,
, (25)
(25)
原点为唯一平衡状态,n×n矩阵 的元素均为分段连续的一致有界函数,则原点是指数稳定平衡点的充要条件是:对任给的一个实对称、一致有界、一致正定的时变矩阵
的元素均为分段连续的一致有界函数,则原点是指数稳定平衡点的充要条件是:对任给的一个实对称、一致有界、一致正定的时变矩阵 ,存在2个实数
,存在2个实数 ,使有
,使有 ,
,
Lyapunov方程
 (26)
(26)
的n×n的解阵 为实对称、一致有界、一致正定,即存在2个实数
为实对称、一致有界、一致正定,即存在2个实数 ,使有
,使有
 (27)
(27)
定理1 对于由式(8)和式(23)组成的系统,若满足结论1、结论2及如下2个条件。
A1 对于如式(21) 所示NDO,存在非线性函数使得NDO误差动态特性指数稳定;
A2 存在正实数 和
和 ,使得
,使得 ,
, 成立,其中
成立,其中 为Lipschitz常数。
为Lipschitz常数。
则系统误差 ,
, 均以指数形式收敛至0。
均以指数形式收敛至0。
证明:根据结论1、结论2,利用二元函数泰勒展开,式(20)可写为
 (28)
(28)
式中: 表示线性化高阶项。
表示线性化高阶项。
由文献[22]中定理4.13的证明过程可知:
 (29)
(29)
再由假设A1,对于NDO误差动态特性式(26)存在Lyapunov函数 满足:
满足:
 (30)
(30)
对于整个闭环系统,考虑Lyapunov函数:
 (31)
(31)
式(31)两边对t求导,并根据引理和式(29),(30)可得



 (32)
(32)
由A2成立可得 <0。由式(8)和式(23)组成的系统可使假设A1和A2成立,因此系统误差和均以指数形式收敛至0,证毕。根据定理1可知,本文所设计的鲁棒IGC方法是稳定的。
<0。由式(8)和式(23)组成的系统可使假设A1和A2成立,因此系统误差和均以指数形式收敛至0,证毕。根据定理1可知,本文所设计的鲁棒IGC方法是稳定的。
3 仿真验证
为了验证所设计的IGC系统性能,针对俯冲攻击段的俯仰通道进行数值仿真。在仿真实验中,无人作战飞机攻击分别针对静止和运动目标。仿真场景设置如下:
静止目标坐标为(3 000, 0),运动目标初始坐标为(3 000, 0),依如下速度模型做变加速运动:

增益矩阵 和非线性函数分别为:
和非线性函数分别为:


伪微分器参数设置为 ,
,
 。
。
无人机由巡航转为攻击时,俯仰平面内的各状态如表1所示,攻击过程中无人机速度恒定。
表1 巡航状态参数
Table 1 Cruise state parameter

在无人机的气动参数中引入25%的偏差,测量值存在15%的噪声干扰。设置导引头制导盲区为10 m,进入制导盲区时关闭控制系统,无人机依惯性飞向目标。仿真结果及分析如下。
首先通过对比IGC设计与传统PID设计、变结构控制设计的脱靶量,来比较3种方法的控制精度。其中,传统设计中制导与控制模块分开进行,均采用PID控制律[24],变结构控制方法如文献[25]所示。表2给出了IGC设计和传统PID设计、变结构控制设计的脱靶量对比仿真结果。
表2 脱靶量对比结果
Table 2 Simulate results comparison of miss distance m

由表2可以看出:相对于传统设计与变结构控制设计方法,本文所设计的IGC系统对静止和运动目标有较好的打击效果,IGC设计方法能够较好地提高控制精度。
其次对IGC设计方法的鲁棒性能进行仿真验证。图3~6给出了无人作战飞机采用IGC设计方法攻击地面静止目标和运动目标时主要参数的变化曲线。
由图3可知:攻击静止目标与攻击运动目标的攻击轨迹都较平滑,无大过载机动。由图4可见:该IGC设计能够保证视线角速率 趋近于0,且幅值变化小、收敛速度快,从而保证了较高的制导精度。图5和图6表明:在整个攻击过程中,无人机的攻角和舵偏角波动幅值平稳,说明该设计对气动参数扰动、测量误差干扰和目标机动干扰等未知不确定量有良好的鲁棒性。
趋近于0,且幅值变化小、收敛速度快,从而保证了较高的制导精度。图5和图6表明:在整个攻击过程中,无人机的攻角和舵偏角波动幅值平稳,说明该设计对气动参数扰动、测量误差干扰和目标机动干扰等未知不确定量有良好的鲁棒性。

图3 无人作战飞机攻击轨迹
Fig. 3 Trajectory of UCAV

图4 视线角速率曲线
Fig. 4 Curve of LOS rate

图5 攻角变化曲线
Fig. 5 Curve of attack angle
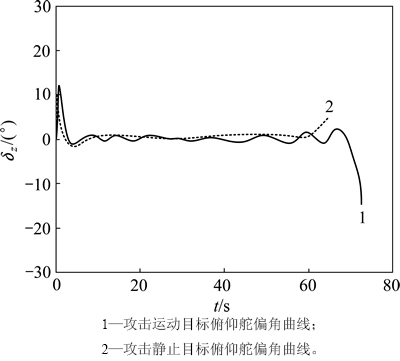
图6 俯仰舵偏角变化曲线
Fig. 6 Curve of control deflection
4 结论
1) 所设计的基于TLC的IGC控制律,较好地提升了系统的制导控制精度。
2) 将制导控制系统的模型误差和未知扰动皆视为不确定性,并利用NDO对IGC模型中的不确定性进行估计并加以补偿,增强了系统的鲁棒性。
3) 基于Lyapunov稳定性理论证明了所设计系统的稳定性。
参考文献:
[1] MAITAL L, TAL S, SHUAL G. Linear quadratic integrated vs separated autopilot-guidance design[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(6): 1722-1730.
[2] YUEH W R, LIN C F. Optimal controller for homing missile[C]// Proceedings of the 1984 American Control Conference. Piscataway, NJ, USA: IEEE, 1984: 737-742.
[3] 侯明哲. 寻的导弹导引与控制一体化设计[D]. 哈尔滨: 哈尔滨工业大学航天学院, 2011: 10-18.
HOU Mingzhe. Integrated guidance and control for homing missile[D]. Harbin: Harbin Institute of Technology. School of Astronautics, 2011: 10-18.
[4] 薛文超, 黄朝东, 黄一. 飞行制导控制一体化设计方法综述[J]. 控制理论与应用, 2013, 30(12): 1511-1520.
XUE Wenchao, HUANG Chaodong, HUANG YI. Design methods for the integrated guidance and control system[J]. Control Theory & Applications, 2013, 30(12): 1511-1520.
[5] WILLIAMS D E, RICHMAN J, FRIEDLAND B. Design of an integrated strapdown guidance and control system for a tactical missile[C]// Proceedings of Guidance and Control Conference. Reston, VA, USA: AIAA, 1983: 57-66.
[6] LIN C F, OHLMEYER E, BIBEL J E, et al. Optimal design of integrated missile guidance and control[C]// Proceedings of 1998 World Aviation Conference. Reston, VA, USA: AIAA, 1998: 1-13.
[7] MENON P K, OHLMEYER E J. Nonlinear integrated guidance-control laws for homing missiles[C]// Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston, VA, USA: AIAA, 2001: 1-9.
[8] SHARMA M, RICHARDS N D. Adaptive integrated guidance and control for missile interceptors[C]// Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston, VA, USA: AIAA, 2004: 1-15.
[9] 尹永鑫, 石文, 杨明. 基于动态逆和状态观测的制导控制一体化设计[J]. 系统工程与电子技术, 2011, 33(6): 1342-1345.
YIN Yongxin, SHI Wen, YANG Ming. Integrated guidance and control based on dynamic inverse and extended state observer method[J]. Systems Engineering and Electronics, 2011, 33(6): 1342-1345.
[10] SHIMA T, IDAN M, GOLAN O M. Sliding mode control for integrated missile autopilot guidance[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(2): 250-260.
[11] 段广仁, 侯明哲, 谭峰. 基于滑模方法的自适应一体化导引与控制律设计[J]. 兵工学报, 2010, 31(2): 191-198.
DUAN Guangren, HOU Mingzhe, TAN Feng. Adaptive, integrated guidance and control law design using sliding mode approach[J]. Acta Armamentarii, 2010, 31(2): 191-198.
[12] TOURNES C, WILKERSON P. Integrated terminal guidance and automatic using subspace-stabilization[R]. AIAA-2001-4275, Reston, VA, USA: AIAA, 2001: 5-17.
[13] 赵春哲, 黄一. 基于自抗扰控制的制导与运动控制一体化设计[J]. 系统科学与数学, 2010, 30(6): 742-751.
ZHAO Chunzhe, HUANG Yi. ADRC based integrated guidance and control scheme[J]. Journal of System Science and Mathematical Science, 2010, 30(6): 742-751.
[14] ZHU J J. Nonlinear tracking and decoupling by trajectory linearization[R]. Huntsville: NASA Marshall Space Flight Center, 1998: 10-23.
[15] 葛辉, 敬忠良, 高剑. 基于轨迹线性化控制方法的全驱动自主式水下航行器轨迹跟踪控制[J]. 上海交通大学学报, 2011, 45(2): 184-189.
GE Hui, JING Zhongliang, GAO Jian. Trajectory tracking of fully actuated AUV based on TLC method[J]. Journal of Shanghai JiaoTong University, 2011, 45(2): 184-189.
[16] 姚从潮, 王新民, 王首斌, 等. 一种高超音速飞行器轨迹线性化控制方法研究[J]. 计算机仿真, 2012, 29(12): 80-85.
YAO Congchao, WANG Xinmin, WANG Shoubin, et al. Research on trajectory linearization control method for hypersonic vehicle[J]. Computer Simulation, 2012, 29(12): 80-85.
[17] 朱亮, 姜长生, 陈海通, 等. 基于单隐层神经网络的空天飞行器直接自适应轨迹线性化控制[J]. 宇航学报, 2006, 27(3): 338-344.
ZHU Liang, JIANG Changsheng, CHEN Haitong, et al. Direct adaptive trajectory linearization control of aerospace vehicle using SHLNN[J]. Journal of Astronautics, 2006, 27(3): 338-344.
[18] 孙国强, 胡寿松. 基于神经网络动态逆的歼击机自适应跟踪控制[J]. 南京航空航天大学学报, 2004, 36(4): 516-519.
SUN Guoqiang, HU Shousong. Neural network dynamic inversion control based on self-organizing fuzzy CMAC neural network[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2004, 36(4): 516-519.
[19] 张晓宇, 王子才. 基于模糊神经网络的质量矩拦截弹动态逆控制[J]. 宇航学报, 2007, 28(3): 551-556.
ZHANG Xiaoyu, WANG Zicai. Dynamic inversion control for mass moment interception missile based on fuzzy neural network[J]. Journal of Astronautics, 2007, 28(3): 551-556.
[20] ZHU J J, BANKER B D, HALL C E. X-33 ascent flight control design by trajectory linearization-A singular perturbation approach[C]// Proceedings of AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston, VA, USA: AIAA, 2000: 1-19.
[21] MICKLE M C, ZHU J J. Bank-to-turn roll-yaw-pitch auto-pilot design using dynamic nonlinear inversion and PD-eigenvalue assignment[C]// Proceedings of the American Control Conference. Piscataway, NJ, USA: IEEE, 2000: 1359-1364.
[22] KAHLIL H K. Nonlinear systems[M]. New Jersey, USA: Prentice-Hall Press, 2002: 35-46.
[23] 郑大钟. 线性系统理论[M]. 北京: 清华大学出版社, 2002: 44-58.
ZHENG Dazhong. Linear system theory[M]. Beijing: Tsinghua University Publisher, 2002: 44-58.
[24] YANG Biao, LIANG Guian, PENG Jinhui, et al. Self-adaptive PID controller of microwave drying rotary device tuning on-line by genetic algorithms[J]. J Cent South Univ, 2013, 20(10): 2685-2692.
[25] CAVALLO A, FERRARA F. Atmospheric re-entry control for a low lift/drag vechicle[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(1): 47-53.
(编辑 陈爱华)
收稿日期:2016-01-20;修回日期:2016-04-09
基金项目(Foundation item):国家自然科学基金资助项目(61601505);中国航空科学基金资助项目(20155196022) (Project(61601505) supported by the National Natural Science Foundation of China; Project(20155196022) supported by the National Aviation Science Foundation of China)
通信作者:黄汉桥,副教授,博士后,从事无人飞行器作战系统与技术方面的研究;E-mail: cnxahhq@126.com

