导电聚合物驱动器的系统辨识和运动控制
杨毅,王湘江,曾庆生
(南华大学 机械工程学院,湖南 衡阳,421001)
摘要:基于导电聚合物具有生物相容性、低电压驱动且可在空气和流体中使用等优点,采用导电聚合物制作弯曲驱动器,并建立实验系统对其运动位移进行测量并进行控制研究。首先,为了建立导电聚合物驱动器控制系统传递函数模型,分别采用最小二乘离线辨识和神经网络在线辨识方法,对驱动器建立准确的二阶数学模型。其次,根据系统辨识模型建立驱动器系统逆模型,并对开环逆模前馈控制进行研究。最后采用逆模前馈PID控制方法对驱动器进行精确运动控制,并与传统PID控制的控制性能进行比较。实验结果表明:逆模前馈PID控制具有很高的控制精度和鲁棒性。
关键词:导电聚合物驱动器;模型辨识;逆模型;运动控制;鲁棒性
中图分类号:TH165 文献标志码:A 文章编号:1672-7207(2014)04-1085-06
Model identification and motion control for conducting polymer actuators
YANG Yi, WANG Xiangjiang, ZENG Qingsheng
(School of Mechanical Engineering, University of South China, Hengyang 421001, China)
Abstract: Conducting polymer can be used to manufacture bending actuators due to their biocompatibility, requiring low actuation voltages and ability to operate in air or liquid media, and an experimental system was established for its movement displacement measurement and control research.Firstly, in order to establish the conducting polymer actuators control system’s transfer function model, a least squares off-line identification and neural network on-line identification method were employed to set up accurate second order mathematical model.Secondly, based on the system model, the inverse model was proposed,and open-loop inverse model feed-forward control were studied. Finally, the feed-forward controller with a PID was used to precision motion control ,and its command following performance was compared with that of traditional PID control.The experimental results show that the inverse model feed-forward controller with a PID has high accuracy and robustness.
Key words: conducting polymer actuators; model identification; inverse model; motion control; robustness
导电聚合物是一种新兴的电致聚合物(也叫人工肌肉),可用作驱动器和传感器的智能材料,它在生物机器人和生物医学设备中有广阔的应用前景[1-6]。聚吡咯(PPy)和聚苯胺是2种最常用的导电聚合物。导电聚合物与电解液接触,在正电压作用下会发生氧化反应。在氧化过程中,负离子进入或正离子离开导电聚合物,以保持电势平衡,在负电压作用下会发生与氧化反应相反的还原反应。负离子迁移的导电聚合物在氧化反应作用下会发生体积膨胀,在还原反应作用下会发生体积收缩。正离子迁移的导电聚合物则完全相反。不同配置的导电聚合物驱动器有双层弯曲型、多层弯曲型、直动型。多层聚吡咯弯曲型驱动器的中间层为非晶、多孔隙的聚偏二氟乙烯(PVDF)层,它不仅是聚吡咯聚合物的基体材料,而且是电解液的容器。驱动器的两边为聚吡咯层。当驱动器两侧加上电压时,正极被氧化负极被还原。被氧化的聚吡咯层吸收负离子而膨胀,被还原的聚吡咯层释放负离子而收缩,最终导致驱动器弯曲。导电聚合物驱动器只需要很低的驱动电压(2 V以下),就可产生相当大的应力和应变输出,并且同时具有质量小和生物相容性好等优点,可广泛应用于机器人和生物医学领域,例如生物微操作系统、仿生系统和生物医学设备[7-9]。根据驱动器的静态和动态行为建立精确的数学模型对驱动器的可行性研究、优化设计和控制都是十分有用的[10-12],但模型的精度、适应性和基于有效数学模型控制其弯曲运动的控制方法还有待进一步研究[13-15] 。在此,本文作者通过制作3层膜聚吡咯驱动器的实验装置,采用离线和在线辨识方法建立新的系统模型来实现对驱动器控制,再通过离线和在线辨识方法证明模型辨识的有效性。设计包括基于逆模前馈控制、PID控制和逆模前馈PID控制等多种方法对辨识模型进行控制,实验结果证明逆模前馈PID控制器能提供准确的运动控制精度。
1 实验装置
图1所示为弯曲型聚合物驱动器的结构。它由3个主要层组成:2个聚吡咯(PPy)层和1个可储存电解液的PVDF夹层。PPy层可以在液体电解质中进行电解,PVDF层两面镀很薄的金层,以提高导电性。弯曲驱动器所需的长度和宽度从大块的结构中剪切得到,这种复合结构呈现出像双层悬臂那样的简单弯曲运动。当电位差或电流通过夹紧的聚合物(PPy)两电极时,聚合物驱动器产生电化学反应将在其顶端输出弯曲机械运动。
图2所示为模型辨识和系统控制的实验装置。利用MATLAB的实时工具箱RTW对硬件在回路中进行实时控制,选用的工作方式为单机型Real-time windows target方案,通过目标链接的方式和Simulink联系在一起,按照单独的实时内核方式驱动外部硬件设备,完成系统实时控制。

图1 导电聚合物驱动器的几何形状
Fig. 1 Geometry of conducting polymer actuator
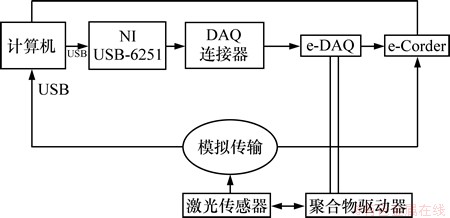
图2 实验装置示意图
Fig. 2 Schematic representation of experimental setup
2 模型辨识
为了建立驱动器的辨识模型,通过实验得到系统模型参数。实验中用于模型辨识和系统控制的是1个长约5 mm、宽约2 mm的PPy驱动器,输入电压信号u(t),u(t)=2sin(πt),输出结果y(t)由激光传感器测量。系统被视为1个黑箱,系统模型参数通过输入电压u(t)和输出y(t)确定。
2.1 离线辨识
驱动器离散系统的动力学方程可由多项式表示:
 (1)
(1)
其中: ;
;
 ;ai和bi分别为线性系统参数;z-1为向后移位运算符号,z-1y(t)=y(t-1)。
;ai和bi分别为线性系统参数;z-1为向后移位运算符号,z-1y(t)=y(t-1)。
由文献[9]可知驱动器可近似为二阶系统,采用最小二乘法来确定模型参数。待估参数向量θ为
 (2)
(2)
数据向量为
 (3)
(3)
式(1)可以改写成
 (4)
(4)
其中:
 ;
;
系统参数的最小二乘估计θ为
 (5)
(5)
在图2所示的系统中,输入u(t)=2sin(πt),由激光位移传感器测量得到输出y(t),由Simulink对输入输出结果进行记录,其采样时间设定为0.002 s。将测量结果代入由式(5)编写的程序中,得到离散传递函数的二阶模型为
 (6)
(6)
图3所示为辨识过程示意图,其中P表示驱动器,v(t)为干扰信号。图4所示为驱动器实际输出和模型预测输出以及输出误差比较。从图4可以看出:驱动器输出信号y(t)和辨识系统输出信号yG(t)之间误差e(t)非常小,说明式(6)所表示的二阶模型有效。
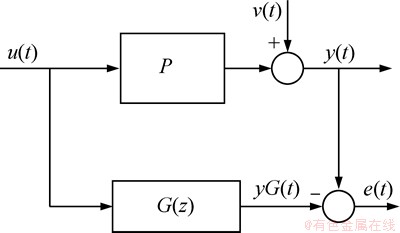
图3 模型辨识过程示意图
Fig. 3 Schematic of model validation procedure
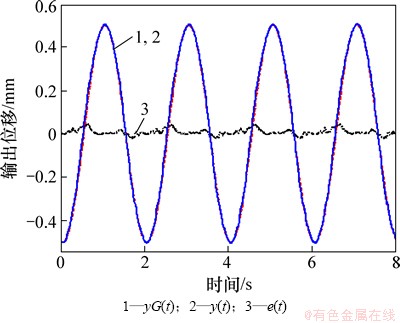
图4 驱动器实际输出和模型预测输出以及输出误差比较
Fig. 4 Comparison of real actuator output and output predicted by model and associated modeling error
2.2 在线辨识
为了进一步验证式(6)的准确性,采用神经网络辨识,辨识方法如图5所示。式(1)可以写成
 (7)
(7)
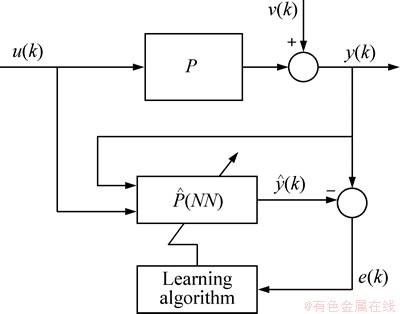
图5 神经网络在线辨识方法示意图
Fig. 5 Schematic of neural network identification method
线性系统参数ai和bi被定义为神经网络的权值wi,则驱动器待估参数向量 为
为
 (8)
(8)
式(4)可以表示为
 (9)
(9)
神经网络的训练规则为
 (10)
(10)
其中:

 (11)
(11)
 (12)
(12)
 ,0<α<2 (13)
,0<α<2 (13)
ci为权重因子,0<ci<1,ci=μi;0<μ<1。
使用上述离线辨识二阶模型估计参数作为神经网络在线辨识加权系数的初始值,可减少在线辨识的计算时间。根据式(9)和(10),得到驱动器的神经网络辨识模型。在图2所示系统中,输入u(t)=2sin(πt),由激光位移传感器测量得到位移输出y(t),在Simulink中构建神经网络辨识模型,可在线实现参数辨识。
图6所示为二阶收敛模型参数的收敛结果,各参数逐渐趋近于常数,说明系统神经网络算法正确,且系统的二阶性质明显。另外,各参数最后围绕着1个固定常数上下波动,说明在线调整是不断进行的,同时也说明系统不完全是一个二阶定常系统,存在着非线性和随机干扰。但是,当要求精度不是特别高时,完全可以将系统视为二阶定常系统。图7所示为在线辨识模型输出y1(t)和驱动器实际产出的输出y(t)以及输出误差e(t)。因为参数的在线调整使得误差很小,所以,曲线y(t)和y1(t)几乎重叠。

图6 模型参数的收敛性
Fig. 6 Convergence of model parameters
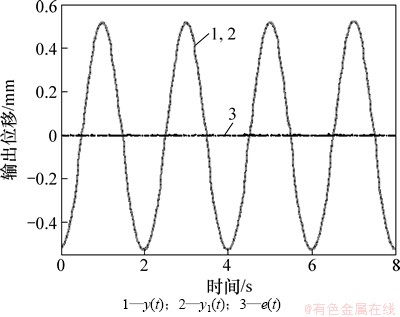
图7 驱动器实际输出和在线辨识模型预测输出以及输出误差比较
Fig. 7 Comparison of real actuator output and output predicted by model and associated modeling error from on-line identification
3 控制系统的设计和执行
运用在线辨识方法得到的模型,采用3个控制方法:逆模型控制、逆模前馈PID控制和PID控制。逆模型控制是一种完全的开环控制系统,不需要任何反馈数据的控制器。式(5)所示离散传递函数不是最小相位系统,其零点不在z平面的单位圆里面,因此,传递函数的倒数是不稳定的,故式(5)不能直接用作建立逆模型控制系统,需要构建逆模型G-1(z)。逆模型滞后于驱动器,可通过函数模型G1(z)和最优函数模型G2(z)来设计逆模型。函数模型为
 (14)
(14)
最优函数模型为
 (15)
(15)
其中:Δ为大于等于1的整数。最优函数模型是不稳定的,因为它的极点不在z平面单位圆里面,G2(z)可以扩展为
 (16)
(16)
由于|b0|≈|b1|,可知式(16)中多项式系数ri非常小,可忽略不计,因此,得到的弯曲驱动器的近似逆模型为
 (17)
(17)
图8所示为逆模型控制系统示意图,输出为
 (18)
(18)
在图2所示系统中,输入yd(t)=0.5sin(πt)的期望输出,在Simulink中构建逆模型G-1(z)作为驱动器的前馈控制器。图9所示为驱动器的实际输出、期望输出和跟踪误差e(t)。
为了便于比较,式(19)给出了离散PID控制器,如图10所示。
 (19)
(19)
其中:
 (20)
(20)
在图2所示系统中,由Simulink中现有模块构建离散PID控制器,通过反复试验,PID控制器参数比例系数、积分系数和微分系数分别选定为kp=250,ki=30,kd=30。图11所示为PID控制输出与期望输出的比较结果。尽管PID控制器是鲁棒控制方法,但轨迹跟踪误差还是比较大。

图8 逆模型控制器示意图
Fig. 8 Schematic of inversion-based feedforward controller
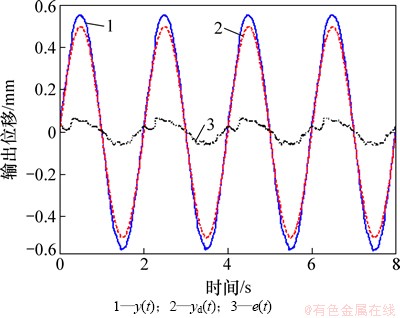
图9 驱动器实际输出和逆模型控制系统期望输出比较以及跟踪误差
Fig. 9 Comparison of real actuator output and desired output under inversion-based feedforward controller and associated tracking error

图10 PID控制方法示意图
Fig. 10 Schematic of PID control strategy

图11 驱动器实际输出和PID控制系统期望输出比较以及跟踪误差
Fig. 11 Comparison of real actuator output and desired output under PID controller and associated tracking error
设计一种逆模前馈PID控制方法来提高系统的鲁棒性,以便更好地适应驱动器参数变化和操作参数变化。其原理如图12所示。
其输出可描述为
 (21)
(21)

图12 逆模前馈PID控制器示意图
Fig. 12 Schematic of feedforward controller with PID controller
在图2所示系统中,由Simulink构建如图12所示的RTW系统进行控制实验。图13所示为逆模前馈 PID控制的实验结果。必须指出的是,跟踪误差e(t)远比逆模型控制和经典的PID控制的小。这是因为系统中逆模前馈控制起关键作用, PID控制是在出现误差时再进行调整,经典的PID所需要调整的误差较大,而逆模前馈PID控制由于只需要调整逆模前馈控制后的误差,所需要调整的误差要小得多,所以,控制效果要比经典PID控制的效果好。为定量反映3种控制方法的效果,由式(22)可得表1所示的3种控制方法均方根误差SRM。
表1 3种控制方法的均方根(RMS)误差
Table 1 RMS of tracking errors under three control strategies
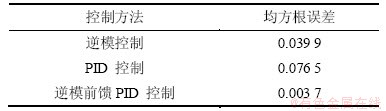
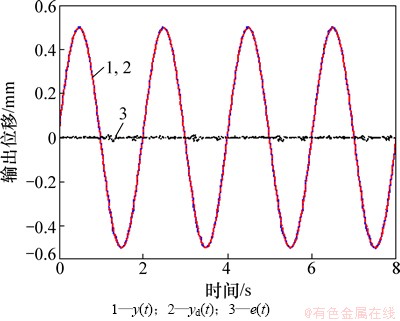
图13 驱动器实际输出和前馈PID控制系统期望输出比较以及跟踪误差
Fig. 13 Comparison of real actuator output and desired output under feedforward PID controller and associated tracking error
 (22)
(22)
本研究用3种不同的控制方法对系统进行运动控制,其中PID控制为传统的控制方法,将图9和图11与图13进行比较发现:本文所提出的开环逆模控制方法比PID控制有更高的控制精度,输出均方根误差减小近50%,而开环逆模控制的硬件结构更加简单,若在实际系统中采用,将大幅度降低控制系统成本。从图13可以看出:采用带逆模前馈的PID控制方法,最大位移输出大幅度减小,信号跟踪精度较前2种提高了1个数量级,并且其主要误差是由传感器带来的高频误差。综合来看,在工作环境稳定且要求不太高时可采用开环逆模控制;当工作要求较高时,采用加前馈逆模的PID控制。此2种方法都比传统的PID控制方法有明显优势。需要指出的是:当采用加逆模前馈的PID控制方法时,要注意PID参数的选取,避免出现饱和、振荡等情况发生。
4 结论
(1) 运用离线和在线辨识方法建立了导电聚合物驱动器中典型3层共轭PPy驱动器的二阶离散传递函数。通过神经网络在线辨识,进一步验证了模型的准确性。
(2) 针对高度敏感的智能驱动器出现的系统参数不稳定性和受干扰性,逆模前馈PID控制系统是最优的控制方法。但必须注意的是,它的执行是基于反馈控制器(需要1个外部传感器)。当不方便安传感器时,可以使用基于准确传递函数的逆模型,这样的模型可以通过在线辨识方法确定。
参考文献:
[1] Vidal F, Plesse C, Palaprat G, et al. Conducting IPN actuators: From polymer chemistry to actuator with linear actuation[J]. Synthetic Metals, 2006, 156: 1299-1304.
[2] 贺曦敏. 以导电聚合物构建的驱动器的制备与性能研究[D]. 北京: 清华大学化学系, 2006: 4-20.
HE Ximin. Fabrication and properties research of actuators based on conducting polymer[D]. Beijing: Tsinghua University. Department of Chemistry, 2006: 4-20.
[3] 徐岩, 赵刚, 杨立明, 等. IPMC人工肌肉的制备工艺研究[J]. 功能材料, 2013, 44(11): 1646-1650.
XU Yan, ZHAO Gang, YANG Liming, et al. Research on preparation technique of IPMC artificial muscle[J]. Journal of Functional Materials, 2013, 44(11): 1646-1650.
[4] Han G, Shi G. Conducting polymer electrochemical actuator made of high-strength three-layered composite films of polythiophene and polypyrrole[J]. Sensors and Actuators B, 2004, 99: 525-531.
[5] Gaihre B, Alici G, Spinks G M, et al. Synthesis and performance evaluation of thin film PPy-PVDF multilayer electroactive polymer actuators[J]. Sensors and Actuators A, 2011, 165: 321-328.
[6] Hiraoka M, Fiorini P, O’Callaghan J, et al. Miniature conductive polymer actuators for high pressure generation in lab onchip systems[J]. Sensors and Actuators A, 2012, 177: 23-29.
[7] Fuchiwaki M, Tanaka K, Kaneto K. Planate conducting polymer actuator based on polypyrrole and its application[J]. Sensors and Actuators A, 2009, 150: 272-276.
[8] Alici G, Devaud V, Renaud P, et al. Conducting polymer microactuators operating in air[J]. Journal of Micromechanics and Microengineering, 2009, 19: 1-9.
[9] Nguyen C H, Alici G, Wallace G G. Modelling trilayer conjugated polymer actuators for their sensorless position control[J]. Sensors and Actuators A, 2012, 185: 82-91.
[10] Shoa T, Yoo D S, Walus K, et al. A dynamic electromechanical model for electrochemically driven conducting polymer actuators[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(1): 42-49.
[11] Alici G. An effective modelling approach to estimate nonlinear bending behaviour of cantilever type conducting polymer actuators[J]. Sensors and Actuators B, 2009, 141: 284-292.
[12] Du P, Lin X, Zhang X. A multilayer bending model for conducting polymer actuators[J]. Sensors and Actuators A, 2010, 163: 240-246.
[13] John S W, Alici G, Cook C D. Inversion-based feedforward control of polypyrrole trilayer bender actuators[J]. IEEE/ASME Transactions on Mechatronics, 2010, 15(1): 149-156.
[14] Yao Q, Alici G, Spinks G M. Feedback control of tri-layer polymer actuators to improve their positioning ability and speed of response[J]. Sensors and Actuators A, 2008, 144: 176-184.
[15] Fang Y, Tan X, Alici G. Robust adaptive control of conjugated polymer actuators[J]. IEEE Transactions on Control Systems Technology, 2008, 16(4): 600-612.
(编辑 陈灿华)
收稿日期:2013-07-11;修回日期:2013-09-17
基金项目:湖南省教育厅科学研究重点项目(13A081);湖南省科技厅科技计划重点项目(2013FJ2016);湖南省教育厅科研项目(11C1089);衡阳市科技项目(2013KS77)
通信作者:杨毅(1979-),男,湖南长沙人,硕士,高级实验师,从事机械制造和机电系统非线性控制的研究;电话:13327344488;E-mail:51269314@qq.com

