����Sigmoid�����������Ⱥ����ĸĽ�LMS�㷨
���������Σ���������������Ф���ɣ���
(�վ����̴�ѧ ���պ��칤��ѧԺ������ ����, 710038)
ժҪ������Sigmoid�����䲽����С����(LMS)�㷨�ŵ��Ǽ�����С�������ٶȿ��Ҷ�ʱ��ϵͳ�ĸ������ܺã�������Щ������֮�����統����źŽ�Сʱ���������ӱ仯���죬����δ֪ϵͳ��ʶ�ٶȽ����ҿɿز������١�Ϊ�˷�����ȱ�㣬���Ż����㷨���ܣ�ͨ������Sigmoid�����ͺ��������һ���µı䲽��LMS�㷨�������������ж�̬��������������С���ڻ�ý�С����̬���ͬʱ���ܹ�����ﵽ�������о�����������Ľ��㷨�����ٶ�Ҫ����������S�����Ľ��㷨�Ŀ죻��ʱ��ϵͳ���ٵ�����Ҫ���ڹ�һ�����LMS�㷨�������㷨��������������������ǰ���£��Ϻõؿ˷�����ź��벽������֮���ì�ܣ��ӿ������ٶȣ��������µĿɿر�����ʹ���ظ�����
�ؼ��ʣ�Sigmoid�����ͺ�������С�����㷨���������ӣ�ϵͳ���٣�ϵͳ��ʶ
��ͼ����ţ�TN911 ���ױ�־�룺A ���±�ţ�1672-7207(2014)10-3470-07
Improved LMS algorithm based on Sigmoid quadratic membership function
XU Yang, XU Songtao, MA Jian, YANG Yongjian, XIAO Bingsong, XIANG Jianjun
(College of Aeronautics and Astronautics Engineering, Air Force Engineering University, Xi��an 710038, China)
Abstract: The least mean square (LMS) algorithm based on S-function some advantages such as has a small amount of calculation, high convergence rate and good tracking performance for time-varying systems. But when the signal��s error is small, the step factor changes too fast, and system identification is not quick enough and the controllable variables are few. To solve the above shortcomings, an algorithm based on the sigmoid quadratic membership function was put forward. The results show that convergence rate of the algorithm is superior to other improved algorithms based on the S-function, and the tracking performance of the time-varying system is better than the improved normalized LMS algorithms. The algorithm put forward in this paper not only overcomes the contradiction between the signal��s error and step factor, but also makes the algorithm more flexible by introducing new controllable variable.
Key words: Sigmoid quadratic membership function��LMS algorithm��variable step size��system tracking��system identification
����Ӧ�źŴ������о�һ��ṹ�ɱ��ɵ���ϵͳ����ͨ����������绷���ĽӴ��������������źŴ��������ܡ�����Ӧ�˲����к�ǿ����ѧϰ���Ը����������㷨������ʵ�֣�Ŀǰ�㷺Ӧ����ͨ��ϵͳ������Ӧ���⡢ϵͳ��ʶ���������ŵĵ������״����д����ȷ���[1-5]����С����(least mean square, LMS)�㷨[6]��һ�ֶ��˲���ϵ��������С�����������в���������ʵ�ֵľ�������Ӧ�˲��㷨������LMS�㷨���ӵ�3����Ҫָ��ֱ�Ϊ��̬ʧ���������ٶ��Լ���ʱ��ϵͳ�ĸ�������[7]����ͨLMS�㷨���������ٶȺ���̬�����߲���ͬʱ�ﵽ���Ч����ȱ ��[8-9]��Ϊ�˷���ȱ�㣬�о���Ա���϶Ա䲽��LMS�㷨���иĽ������㷨�������������ж�̬�ı䲽��[10-17]������ද̬�ı䲽���ķ����У�����[13]����˹�һ��LMS(NLMS)�㷨������֤�����������ٶȷ���Ҫ���ڴ�ͳLMS�㷨�������㷨���ڶ���δ֪ϵͳ��ʶ�����ɵ������ٵ�ȱ�㡣����[14]�����������ŷʽƽ��������ΪNLMS���������IJ��������NVSS�㷨�����㷨�������ٶȷ���Ҫ����ǰ�ߣ�������NLMS��ȱ�㲢δ���Խ��������[15]������[14]�Ļ����������������Ӻ�����ϵ��������˦�NVSS�㷨�����㷨��ϵͳ��ʶ�������ٶȵȷ��������Ҫ����������һ��LMS���㷨������ɵ��������Ҽ���������ʵʱϵͳ�����ʺϡ���������[16]����Sigmoid�������Ⱥ������ڲ����������õĵ���Ч������֤���˵������������������Sigmoid���������㷨��ϵͳ��ʶ���������˺ܴ���ߣ�������������ӽ���ʱ���������������л����仯�����ԣ��ɵ��α������١�����[17]����������������ij˻���ΪS�����IJ������÷����ܹ�����LMS�㷨���������������ԣ��ϴ�̶���������ٶȣ�����δ�ܺý��ǰһ�ַ�����ȱ�㡣���������ڴ˻����������һ���µĸĽ����㷨������Ч�������ȱ�㡣���㷨������δ֪ϵͳ��ʶ�����и���ı�ʶ�ٶȣ��������ٶȷ����������������Ҳ����Ѹ�٣�������������1���µı�����ʹ���㷨������Դ�����ӡ�
1 ��ͳLMS�㷨
����LMS�㷨�����˲�����ͼ1��ʾ�������ź�x(n)����m-1����ʱ��Ԫz-1����nʱ�̹���1�������ź�ʸ��X(n)��
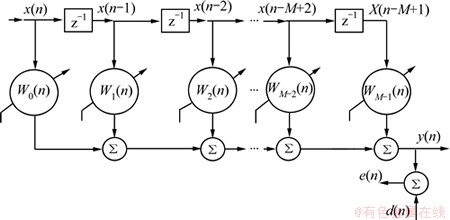
ͼ1 ��������Ӧ�˲����ṹ��ͼ
Fig.1 Block structure of transversal adaptive filter
���������½�����LMS(��С����)�㷨������ʽ���ܽ����¡�
����Ӧ�˲�������������Ϊ
 (1)
(1)
����Ӧ�˲���Ȩϵ������Ϊ
 (2)
(2)
��Ӧ���˲�������ź�Ϊ
 (3)
(3)
����źű�ʾΪ
 (4)
(4)
�����̶���LMS�㷨������������Ϊ
 (5)
(5)
ʽ�У����ǿ��������ٶȺ���̬���IJ��������������ӣ��˴�Ϊ������e(n)Ϊ����źţ����������ź�X(n)����ϵͳ���������ź�d(n)�IJ�ֵ��Ϊ��֤�㷨�������ܹ�������������0<��<1/��max����maxΪ�����ź�ʸ��X(n)������ؾ���Rxx���������ֵ[18]��
2 ��һ��LMS�㷨
�ڴ�ͳ��LMS�㷨�У�ʧ��ֱ�����ͷ��������x(n)�����ȡ���ˣ���x(n)�ϴ�ʱ��LMS�˲����������ݶ������Ŵ����⡣Ϊ�˽��������⣬��ʹ�ù�һ��LMS�˲�����
��һ��LMS�˲�������С������ԭ����һ�ֱ�����ʽ��Լ������Ϊ
 (6)
(6)
ʽ�У� ��ʾ��n+1�ε����˲����µ�Ȩ������x(n)��ʾ��ͷ����������d(n)Ϊ�����źš�
��ʾ��n+1�ε����˲����µ�Ȩ������x(n)��ʾ��ͷ����������d(n)Ϊ�����źš�
���㷨��Ȩϵ���ĵ�����ʽ��Ϊ
 (7)
(7)
ʽ�У�u(n)Ϊ�����������������ų�ͷȨ������ÿ�������еĸ���������Ӱ���㷨�����ٶȵĹؼ�����[19-23]��
����Լ���������ó����յĵݹ����ʽΪ
 (8)
(8)
ʽ�У� Ϊ����������ŷʽƽ��������
Ϊ����������ŷʽƽ�������� Ϊ����Ӧ��������Ϊ1��С�ij���(Ϊ���������С��������˲���ɢ����)��
Ϊ����Ӧ��������Ϊ1��С�ij���(Ϊ���������С��������˲���ɢ����)��
����[14]��NLMS�㷨�Ļ����������NVSS�㷨�����㷨������źŵ�ŷʽƽ������������Ӧ�����ij˻�������ʽ(8)�е������ź�ʸ����ŷʽƽ��������
 (9)
(9)
����[15]��ʽ(9)���������ģ�
 (10)
(10)
ʽ�У��ѣ�0��Ϊ����ϵ������nΪ��n�����������ϵ����
 (11)
(11)
��NVSS�㷨ͨ�������������Ӧ�(i)�����ݵ�ǰ��ȥ��m��������������ϵ����n����ͨ����n������ϵ����������һ���ĵ�������u(n)����Ӱ�졣�÷�����֮NVSS���и���������ٶȣ�����ʱ��ϵͳ�ĸ�������Ҳ���á������ڸ��㷨���������ɵ��ڲ������٣����ʺ��ڹ���ʵ����
3 ����S�����ĸĽ���LMS�㷨
���ڹ�һ��LMS�㷨�������ٶȡ�δ֪ϵͳ�ı�ʶ����IJ��㣬��������������˻���S�������Ⱥ����ı䲽��LMS(SVSLMS)�㷨�����㷨�в�����(n)�������e(n)Ϊ������Sigmoid����(���ͦ�Ϊ����)
 (12)
(12)
����SVSLMS�㷨���������źŵĹ��������ԣ���ǿ���������VSSLMS�㷨�����㷨��ʽ(12)�Ļ����Ͻ��������ģ�
 (13)
(13)
ͨ���Ľ���VSSLMS�㷨��ʹ�ò���ֻ����������Ŀ���ź���أ�����Ӳ������ź��أ��Ӷ������˱䲽��LMS�㷨�������������ԣ�������������ٶȡ�
����2���㷨�У����ڲ������Ӷ���С����źű仯�����ȱ�㣬Ϊ����С�����ڴ˻����Ͻ����˸Ľ�������˸Ľ���SVSLMS(GJSVSLMS)�㷨��
 (14)
(14)
�Ľ���SVSLMS�㷨��ʱ��ϵͳ���ٷ����δ֪ϵͳ��ʶ���������Ե���ߣ�������С���ʱ���������ӱ仯���ǰ����������ߣ�������Ȼ������Ҫ����ܴ���������֤�˻���e(n)�Ĵη���S���������ܣ���ͼ2��ʾ����ͼ2�ɼ�����e(n)��������ʱ���������ӱ仯��֮���η�Ҫ���ܶ࣬���ǵ�e(n)��δΪ��ʱ���������ӹ���ص�����ʹ���佫�����ϴ����̬��
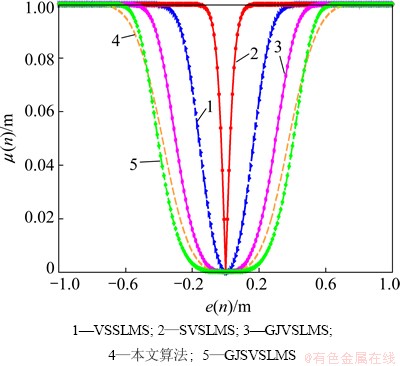
ͼ2 ����S�����㷨e(n)-��(n)�任���߶Ա� (��=40, ��=0.2, ��1=15)
Fig.2 Step size variations of several algorithms in stationary environment
Ϊ�˿˷�e(n)-��(n)֮����ڵ�ì�ܣ�����㷨�������ٶ������ڿ��Ƶ�ȱ�ݣ����������һ�ֻ���Sigmoid�����������Ⱥ����ĸĽ��㷨���䲽�����ӵı���ʽ���£�
 (15)
(15)
�����㷨����Ļ����������л���S�����ı���LMS�㷨�У�GJSVSLMS������Ҫ���������㷨������ͨ������[24]�˽Sigmoid�ͺ����ij˻�����������ĺ���������Ҫ����һ�������ܣ�Ϊ�ˣ������������˻��ڲ�����1��S������ʹ���㷨�ڼ�������Сʱ��������ߡ�
ͨ��ͼ2�Աȱ����㷨�����㷨�IJ������ӵı仯���Կ��Եó�����e(n)�ϴ�ʱ�������㷨�Ц�(n)Ҳ�ϴ����½��ٶ���GJSVSLMS�ļ�����ͬ�����㷨����������̬ʱ����(n)����e(n)�ı�С����С����e(n)�ӽ�0ʱ����(n)�������㷨��Ⱦ��и��ӻ����仯�����ԡ����ұ���������㷨�ɿر���Ҳ�������㷨�Ķ࣬ʹ���㷨���������ڿ��ơ�
4 ���漰���ܷ���
Ϊ�˼��鱾���㷨�������ٶȡ�δ֪ϵͳ�ı�ʶ��ʱ��ϵͳ���ٷ�������ܣ����Ĺ���3�ֲ�ͬ�ķ��滷�������ֱ����һ��LMS������sigmoid�����Ľ��͵�LMS�㷨�����˶Աȣ�ͨ������˵�������㷨�����ܡ�
4.1 ƽ�Ȼ����в�ͬ����ʱ�����㷨��������
Ϊ��ȡ�����Ч���������ȶ�Ӱ���㷨���ܵ�3���������з�����
���˲�������Ϊ2�ף���弤��Ӧ��ϵ��Ϊ[0.8, 0.5]������x(n)�Ǿ�ֵΪ0������Ϊ1�İ�������v(n)�Ǿ�ֵΪ0������Ϊ0.04�İ�������x(n)��v(n)������أ����������500�������������Ϊ��������1 000������ȡ��ֵ�Ľ����
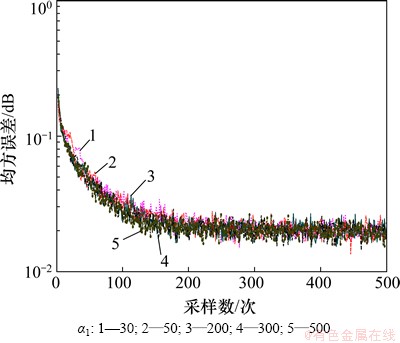
��ͼ3�У���1�ͦ���ͬ�����ֱ�ȡ2��8��15��30��50����ͼ3�ɼ������Ŧ����������ٶȲ�����ߣ��ڱ���ʵ�����������ֵΪ50����ͼ4�У����ͦ�1��ͬ���·ֱ�ȡ0.02��0.05��0.08��0.10��0.20����ͼ4�ɼ������Ŧ����������ٶȲ�����ߣ��ڱ���ʵ�����������ֵΪ0.20����ͼ5�У����ͦ���ͬ����1�ֱ�ȡ30��50��200��300��500����ͼ3~5�ɼ������Ŧ�1���������ٶȲ�����ߣ���������������ȡ���ֵΪ500��
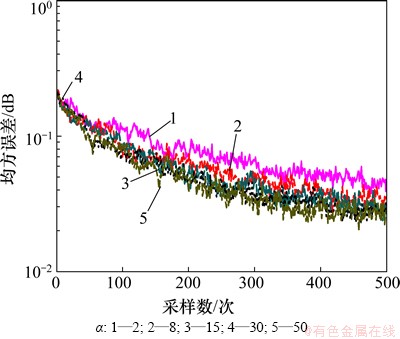
ͼ3 ���Ծ�������Ӱ��(��=0.3; ��1=30)
Fig.3 Influence of �� on MSE
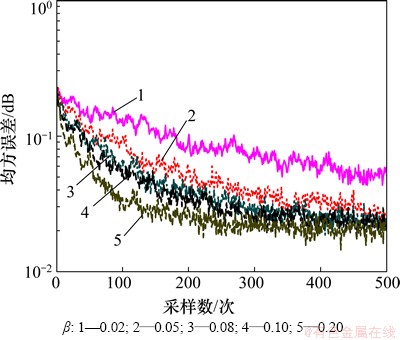
ͼ4 �¶Ծ�������Ӱ��(��1=120; ��=140)
Fig.4 Influence of �� on MSE
ͼ5 ��1�Ծ�������Ӱ��(��=0.3; ��=80)
Fig.5 Influence of ��1 on MSE
���ڹ�һ��LMS�㷨����Ʋ��������S������LMS�㷨����ͬ�����ԣ��˴���ֻ����4�ֻ���S������LMS�㷨���������ܣ��Աȸ��㷨��S�����еIJ���ȡΪʵ���е����ֵ[11]������������ã���=50����=0.20����1=500��������500����������1 000������ȡ��ֵ���ó���4���㷨��ѧϰ���߶Ա���ͼ6��ʾ����ͼ6�ɼ��������S�����ĸĽ�LMS�㷨��ȣ�����������㷨�����ٶ���죬����ʱ����̣����ֳ��˱����㷨�ĸ�Ч�ԡ�
4.2 δ֪ϵͳ������ʶ����
��������Ӧ�˲���������δ֪ϵͳ�Ľ�����Ϊ���ף����ǹ�ͬ������x(n)��ֵΪ0������Ϊ1�İ���������v(n)�Ǿ�ֵΪ0������Ϊ0.02�İ�����������Ӧ�˲����������ź�d(n)Ϊx(n)ͨ���弤��ӦΪ[2, 1, -0.5]��ϵͳ����v(n)�ĺ�[20]��ͨ������[15]��[11]�ó����ڹ�һ��LMS�㷨�Ц�NVSS������Ҫ���Ա�NVSS�;���NLMS�ĺã��ڻ���S������LMS�㷨�У�GJSVSLMS�㷨������Ҫ�������Ļ���S�����ĸĽ�LMS�㷨�ã���ȡ����NVSS=2.9����=50����=0.20ʱ����NVSS��GJSVSLMS�㷨�����ֱܷ�ﵽ��ѡ�
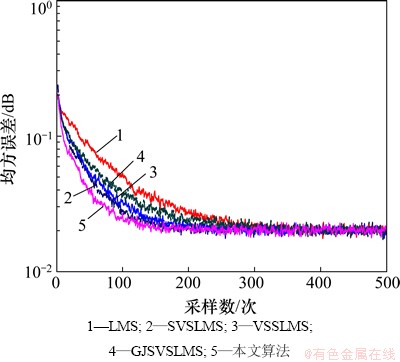
ͼ6 ����S�����㷨�뱾���㷨ѧϰ���߶Ա� (��=0.20; ��=50; ��1=500)
Fig. 6 MSE of several LMS algorithms based on S-Function in stationary environment
����������ã�����NVSS=2.9����=50����=0.20����1=500����������Ϊ1 000����������1 000�κ�ȡƽ���������ͼ7~9��ʾ��
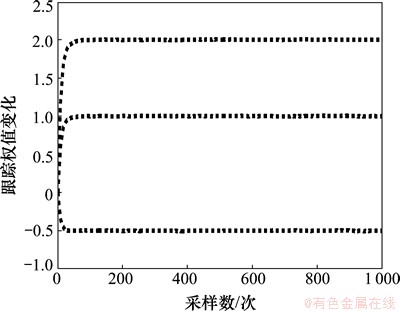
ͼ7 ��NVSS�㷨��ʶ���
Fig.7 Simulation of ��NVSS-LMS algorithm for system identification
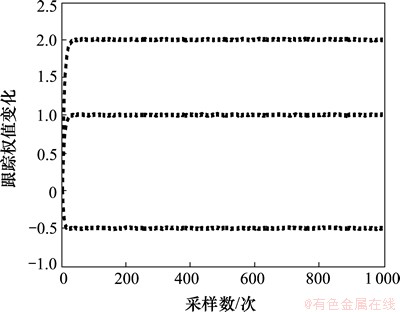
ͼ8 GJSVSLMS�㷨��ʶ���
Fig.8 Simulation of GJSVSLMS-LMS algorithm for system identification
ͼ9 �����㷨ϵͳ������ʶ���
Fig.9 Simulation of GJSVSLMS-LMS algorithm for system identification
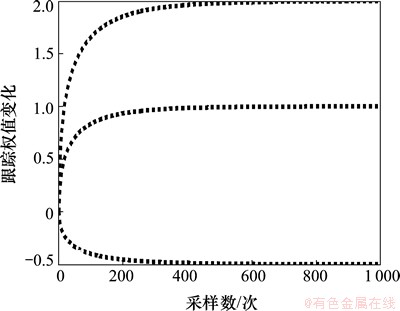
�ж��㷨�����Ӿ��ǿ������㷨��ʶ�Ľ��������ϵͳ����������ͬ[25]����ͼ7~9���Կ�������NVSS�㷨�ڵ����ӽ�400��ʱ�ó�ϵͳ����������GJSVSLMS�㷨�ڴ�Լ����60��ʱ�ó�ϵͳ��������������������Ļ���S����ƽ���㷨�ڵ�����Լ25��ʱ�͵ó�ϵͳ�����IJ��������Աȿ�֪������������㷨��ϵͳ��ʶ����Ҫ���ڦ�NVSS�㷨��GJSVSLMS�㷨�������㷨����Ȩֵ�ı仯�������У�����ͨ��2�������Ⱥ����ij˻�������������ʵ��Ȩ��������ʹ�ý��ٵĵ���������ʶ��ϵͳ������
4.3 ���ٶ�ʱ��ϵͳ���ܷ���
�ڸ��ٶ�ʱ��ϵͳ���ܱȽϵķ����У���Ȼʹ�þ�ֵΪ0������Ϊ1�İ������ź�x(n)��Ϊ��ʱ��ϵͳ������Ӧ�˲����Ĺ�ͬ���룬����Ӧ�˲����������ź�d(n)Ϊx(n)������ʱ��ϵͳ��������ֵΪ0������Ϊ0.04�İ������ź�v(n)֮��[11]���������������Ϊ1 800����ʱ��ϵͳ�ij�ʼ�弤��ӦֵΪ[0.8, 0.5]���ڵ�300��������ʱ����Ϊ[0.4,0.2]��֮��ֱ���600��900��1 200��1 500��ʱ��������2��弤��Ӧֵ֮���������䣬�ֱ����NVSS�㷨����NVSS�㷨��GJSVSLMS�㷨�ͱ�����������㷨���и������ܱȽϡ�
����������ã���NVSS=0.037������NVSS=2.9����=50����=0.20����1=50����������Ϊ1500����������500��ȡƽ��ֵ�������ͼ10��ʾ��
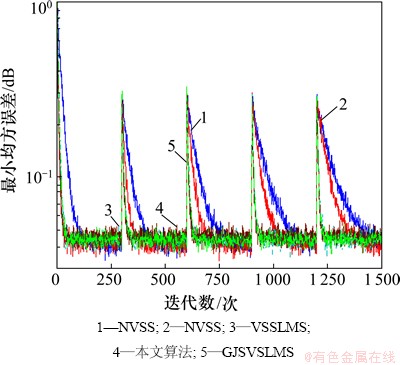
ͼ10 �����㷨�Զ�ʱ��ϵͳ�������ܵıȽ�
Fig.10 Comparison of tracking performance of several algorithms for step change system
��ͼ10���Կ�������5���㷨��ƽ�Ȼ����ж����ŽϺõ���������(��0~200��)����������ϵͳ�У������Ƕ�ʱ��ϵͳ�У�����S�����ĸĽ�LMS�㷨���嶼Ҫ���ڹ�һ����LMS�㷨��
���ķ���������5������㣬NVSS�ͦ�NVSS�㷨(�����ڹ�һ��LMS�㷨)��������ϵͳ���Ž�ǿ�ĸ���������������������������ӣ�����ߵĸ����ٶȻ����Լ��������Ҷ����ٶ�Ҫ��������������㷨���ɼ�������S�������Ⱥ�����˵�������Ȩֵ�仯�����ж�ҪԶ�ȹ�һ���㷨�Ĵ�
�Ա�3������S�����ĸĽ�LMS�㷨���������ٶȴ�����ͬ����Ҳ˵����Sigmoid��������Ȩֵ�仯�ĸ߶������Ժ����õ�³���ԡ�
5 ����
1) �����һ�ֻ���Sigmoid�����������Ⱥ����ĸĽ�LMS�㷨���ڷ�����Ӱ����㷨�����Ӻ����һ����LMS�㷨����������S�����ĸĽ�LMS�㷨�ֱ���ƽ�Ȼ�����ʱ��ϵͳ�����½��жԱȡ���������ʾ�������㷨�������ٶȡ�ϵͳ��ʶ�������ܶ�Ҫ������������S�����ĸĽ�LMS�㷨��
2) ������ϵͳ�µĸ������ܺ��ڹ�һ���㷨��LMS�㷨�������㷨��������1���ɿز�����ʹ�ÿ��������ٶȸ�����
�ο����ף�
[1] Kwong R H, Johnston E W, Variable A. Step size LMS algorithm[J]. IEEE Trans on Signal Processing, 1992, 40(7): 1633-1642.
[2] Boulnasr T A, Mayyas K, Robust A. Variable step-size LMS type algorithm: Analysis and simulation[J]. IEEE Transaction on Signal Processing, 1997, 45(3): 631-639.
[3] κ��, ���컢, ������, ��. ����ͨ����һ�ָĽ��ı䲹��LMS�����㷨[J]. �����ʵ��ѧѧ��(��Ȼ��ѧ��), 2014, 26(1): 42-48.
WEI Wu, ZUO Tianhu, LIU Qilie, et al. A modified variable step size LMS adaptive filtering algorithm in satellite communication[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 2014, 26(1): 42-48.
[4] ����ũ, ͯ����, ����, ��. �Ľ���LMS�㷨�������״���Ŷ���ϵͳ�е�Ӧ��[J]. �վ����̴�ѧѧ��(��Ȼ��ѧ��), 2010, 11(5): 31-34.
LONG Genong, TONG Ningning, LI Hongbing, et al. A Refrained LMS algorithm and its application in radar jamming cancellation system[J]. Journal of Air Force Engineering University (Natural Science Edition), 2010, 11(5): 31-34.
[5] Ang W P, Farhang-Boroujeny B. A new class of gradient adaptive step-size LMS algorithms[J]. IEEE Transaction on Signal Processing, 2004, 49(4): 805-809.
[6] Bershad N J. Behavior of the ��-normalized LMS algorithm with Gaussian inputs[J]. IEEE Transaction on Acoustics Speech, and Signal Processing, 1987, 35(5): 636-644.
[7] ���ޱ�, ��ӥ. ����Ӧ�˲��㷨����[J]. ���ݴ�ѧѧ��(��Ȼ��ѧ��), 2003, 1(2): 44-49.
ZOU Yanbi, GAO Ying. Review for an adaptive filtering algorithm[J]. Journal of Guangzhou University (Natural Science Edition), 2003, 1(2): 44-49.
[8] Widrow B, Mccool J M, Larimoer M G, et al. Stationary and no stationary learning characteristics of the LMS adaptive filter[J]. Proc IEEE, 1976, 64(8): 1151-1162.
[9] Gelfand S B, Wei Y, Krogmeier J V. The stability of variable step-size LMS algorithms[J]. IEEE Trans on Signal Processing, 1999, 47(12): 3277-3288.
[10] ��Դ��, ����, �۾�, ��. �µı䲽����һ����С�����㷨[J]. �廪��ѧѧ��(��Ȼ��ѧ��), 2002, 42(1): 15-18.
GU Yuantao, TANG Kun, CUI Huijuan, et al. A new variable step size normalized LMS algorithm[J]. J Tsinghua Univ (Sci & Tech), 2002, 42(1): 15-18.
[11] ��С��, �����. һ���µı䲽��LMS����Ӧ�˲��㷨[J]. ����ѧ��, 2006, 34(6): 1123-1126.
LUO Xiaodong, JIA Zhenhong. A new variable step size LMS adaptive filtering algorithm[J]. Acta Electronica Sinica, 2006, 34(6): 1123-1126.
[12] ��ӥ, лʤ��. һ�ֱ䲽��LMS����Ӧ�˲��㷨������[J]. ����ѧ��, 2001, 29(8): 1094-1097.
GAO Ying, XIE Shengli. A variable step size LMS adaptive filtering algorithm and its analysis[J]. Acta Electronica Sinica, 2001, 29(8): 1094-1097.
[13] ����ǿ, ������, ֣����. һ���µĿɱ䲽��LMS����Ӧ�˲��㷨[J]. �Ͼ��ʵ�ѧԺѧ��(��Ȼ��ѧ��), 2003, 23(4): 12-16.
WANG Minqing, HU Guilong, ZHENG Baoyu. A novel LMS adaptive filter algorithm with variable step size[J]. Journal of Nanjing Institute of Posts and Telecommunications (Natural Science Edition), 2003, 23(4): 12-16.
[14] Anderson P D. Ingram M A. The performance of the least mean squares algorithm combined with spatial smoothing[J]. IEEE Trans on Signal Processing, 1997, 45(4): 1005-1012.
[15] �����, ��ΰǿ. һ�ֿɱ䲽��LMS�㷨�������ܷ���[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2006, 34(3): 61-64.
YANG Jinming, WANG Weiqiang. A variable step size LMS adaptive filtering algorithm and Its analysis[J]. Journal of South China University of Technology (Natural Science Edition), 2006, 34(3): 61-64.
[16] ������, Τ��. ����S�ͺ����ı䲽��LMS����Ӧ�˲��㷨[J]. ���ߵ繤��, 1996, 26(4): 44-47.
TAN Jingfan, WEI Gang. A variable step size LMS adaptive filtering algorithm based on S-Function[J]. Radio Engineering, 1996, 26(4): 44-47.
[17] ��, ����. һ�ָĽ��ı䲽��LMS����Ӧ�˲��㷨[J]. �ִ��״�, 2008, 30(7): 60-67.
ZHANG Yuan, WANG Hui. An improved variable step size LMS adaptive filtering algorithm[J]. Mordern Radar, 2008, 30(7): 60-67.
[18] ���ɡ��ս�. ����Ӧ�˲���ԭ��[M]. 4��. ����: ���ӹ�ҵ������, 2003: 183-187.
Haykin S. Adaptive filter theory fourth[M]. 4th ed. Beijing: Publishing House of Electronics Industry, 2003: 183-187.
[19] Kwong R H, Johnstone W. A variable step size LMS algorithm[J]. IEEE Trans Signal Processing, 1992, 40(7): 1636-1642.
[20] Gitlin R D, Weinstein S D. The effects of large interference on the tracking capability implemented echo cancellers[J]. IEEE Trans on COM, 1978, 30(6): 833-839.
[21] Tyseer A, Mayyas K. A robust variable step-size LMS type algorithm analysis and simulations[J]. IEEE Trans on Signal Proc, 1997, 45(7); 631-639.
[22] Pazaitls D I, Constantinides A G. A novel kurtosis driven variable step-size adaptive algorithm[J]. IEEE Trans. Signal Processing, 1999, 47(3): 864-872.
[23] Shin H C, Sayed A H, Song W J. Variable step-size NLMS and affine projection algorithms[J]. IEEE Signal Processing Letters, 2004, 11(2): 132-135.
[24] ������, ���ܻ�. MATLAB����ģ��ϵͳ���[M]. ����: �������ӿƼ���ѧ������, 2002: 82-85.
WU Xiaoli, LIN Zhehui. Fuzzy system design based on MATL-AB[M]. Xi��an: Publishing House of XiDian University, 2002: 82-85.
[25] ����, ������, ��С˧. һ�ָĽ�����LMS�㷨������ϵͳ��ʶ�е�Ӧ��[J]. �����DZ�ѧ��, 2007, 28(7): 1340-1343.
LI Zhu, YANG Peilin, XING Xiaoshuai. An improved variable step size LMS algorithm and its application on system identification[J]. Chinese Journal of Scientific Instrument, 2007, 28(7): 1340-1343.
(�༭ ����ƽ)
�ո����ڣ�2013-09-28�������ڣ�2013-12-18
������Ŀ(Foundation item)������ʡ������Ϣϵͳ�ۺϼ����ص�ʵ���һ���������Ŀ(201107Y03)(Project (201107Y03) supported by Electronic Information System Meta-Synthetic Key Laboratory Project Fund of Shanxi Province)
ͨ�����ߣ�����(1989-)���У����ּ����ˣ�˶ʿ������Ŀ������о����绰��15619262557��E-mail��mingze0108@126.com

