Intelligent monitoring-based safety system of massage robot
��Դ�ڿ������ϴ�ѧѧ��(Ӣ�İ�)2016���10��
�������ߣ����� �ʤ ������ ���� ������ ����� ���h ��
����ҳ�룺2647 - 2658
Key words��robot; fault tree; safety strategies for robots; intelligent safety
Abstract: As an important attribute of robots, safety is involved in each link of the full life cycle of robots, including the design, manufacturing, operation and maintenance. The present study on robot safety is a systematic project. Traditionally, robot safety is defined as follows: robots should not collide with humans, or robots should not harm humans when they collide. Based on this definition of robot safety, researchers have proposed ex ante and ex post safety standards and safety strategies and used the risk index and risk level as the evaluation indexes for safety methods. A massage robot realizes its massage therapy function through applying a rhythmic force on the massage object. Therefore, the traditional definition of safety, safety strategies, and safety realization methods cannot satisfy the function and safety requirements of massage robots. Based on the descriptions of the environment of massage robots and the tasks of massage robots, the present study analyzes the safety requirements of massage robots; analyzes the potential safety dangers of massage robots using the fault tree tool; proposes an error monitoring-based intelligent safety system for massage robots through monitoring and evaluating potential safety danger states, as well as decision making based on potential safety danger states; and verifies the feasibility of the intelligent safety system through an experiment.
J. Cent. South Univ. (2016) 23: 2647-2658
DOI: 10.1007/s11771-016-3326-3

HU Ning(����)1, LI Chang-sheng(�ʤ)2, WANG Li-feng(������)2, HU Lei(����)2, 3,
XU Xiao-jun(������)2, ZOU Yun-peng(�����)2, HU Yue(���h)2, SHEN Chen(��)2
1. School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China;
2. School of Mechanical Engineering and Automation, Beihang University, Beijing 100191, China;
3. School of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China
 Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Central South University Press and Springer-Verlag Berlin Heidelberg 2016
Abstract: As an important attribute of robots, safety is involved in each link of the full life cycle of robots, including the design, manufacturing, operation and maintenance. The present study on robot safety is a systematic project. Traditionally, robot safety is defined as follows: robots should not collide with humans, or robots should not harm humans when they collide. Based on this definition of robot safety, researchers have proposed ex ante and ex post safety standards and safety strategies and used the risk index and risk level as the evaluation indexes for safety methods. A massage robot realizes its massage therapy function through applying a rhythmic force on the massage object. Therefore, the traditional definition of safety, safety strategies, and safety realization methods cannot satisfy the function and safety requirements of massage robots. Based on the descriptions of the environment of massage robots and the tasks of massage robots, the present study analyzes the safety requirements of massage robots; analyzes the potential safety dangers of massage robots using the fault tree tool; proposes an error monitoring-based intelligent safety system for massage robots through monitoring and evaluating potential safety danger states, as well as decision making based on potential safety danger states; and verifies the feasibility of the intelligent safety system through an experiment.
Key words: robot; fault tree; safety strategies for robots; intelligent safety
1 Introduction
With the development of artificial intelligence, the capabilities of robots for serving humans have been constantly improved, and the content of the services that robots can provide has also become diversified. However, the threats posed by robots to the safety of humans have also increased. As an important attribute of robots, safety is involved in each link of the full life cycle of robots, including the design, manufacturing, operation, and maintenance. The existing definition of safety, safety theories and preventative measures have also been continuously revised and perfected during the process of robot development. At the initial development stage of robots, robots were applied in such structured environments as industrial production lines; robots were used to replace humans to complete repeated production activities in onerous and dangerous environments that were not suitable for humans. The dangers of robots are manifested as follows [1-2]: 1) Robot errors occur on their own; 2) Robots collide with humans, resulting in harm to humans; 3) Operators make operation errors, resulting in the occurrence of erroneous actions.
Focusing on the analysis of the causes of robot accidents, the formulation of safety and protection standards, the safety design methods for robot systems and the implementation measures for such systems [2], early research on robot safety formulated implementation methods for robot safety [3-9] and various industrial standards [10-12], including the design of redundancy, automatic fault prevention devices, software and hardware fault prevention and protection, and emergency devices; the evaluation of the safety of working environments and the design of improvements to the safety of working environments; and the determination of the limiting conditions for the safety of manipulator movements. In recent years, robots, particularly service robots, have begun to enter into society. Based on the interactive relationship among humans, robots, and the environment, the tasks and safety issues of robots are classified into the following levels.Foundation item: Projects(2012AA041601, 2015AA0400614) supported by the Hi-Tech Research and Development Program of China; Project(2012BAI14B02) supported by the National Key Technology R&D Program of China; Project(61333019) supported by the National Natural Science Foundation of China; Project(SKLRS-2013-MS-09) supported by the Open Fund of State Key laboratory of Robotics and System, China; Project(YWF-14-JXXY-001) supported by the Scientific Research Business Fund, China; Project(2014ZX04013011) supported by the National Science and Technology Major Project of the Ministry of Science and Technology of China
1) A robot of this level independently completes a certain task. The robot has a definite task and does not exchange information and energy with humans or the environment. Therefore, the safety measures and standards for industrial robots of this level satisfy the safety requirements for this type of robot.
2) A robot of this level assists humans in completing a certain task. Humans are responsible for the subtask allocation of each component of the human-robot- environment system, the monitoring of the system status, and the execution of the system tasks. A robot of this level exchanges information and energy with the surrounding humans and environment. Therefore, in addition to the dangers of industrial robots (industrial robots may collide with humans; operators may make operation errors; robot errors may occur on their own), the potential dangers of a robot of this level also include indirect harm to humans caused by the misoperation of the robot resulting from the decision-making function; such indirect harm increases with the increasing intelligence level of the robot and the increasing degree of the complexity of the task. Traditional methods of using safety standards and safety strategies at the mechanical level to lower the dangers of robots cannot effectively solve the aforementioned safety issues. Therefore, various types of research related to robot safety, such as research on robot reliability analysis, research on the reliability design, and research on fault detection and diagnosis, have been performed; methods for improving robot safety have been proposed, including reservation measures [13-19], the fault- tolerant technique [20], maintenance and repair methods, and methods for system fault detection and diagnosis [21-23], which can effectively lower the safety risk. However, because a robot exists in a passive interaction situation, when a robot error occurs, only the robot safety status can be sent to the human-robot-environment system in an information interaction mode; the human- robot-environment system fault caused by the robot error is monitored and addressed by humans who are the active entities in the human-robot interaction. Humans are far inferior to robots in aspects such as storage capacity, calculation capacity, fatigue resistance capacity, and reaction speed; therefore, humans are disadvantageous in the real-time and stability aspects of safety control.
3) A human assists a robot with a certain task. The robot is responsible for the subtask allocation of each component of the human-robot-environment system, the monitoring of the system status, and the execution and control of the system tasks. The human of this level has a passive interaction role in the human-robot-environment system. The robot must complete intelligent decision- making tasks at the human-robot-environment system level in addition to the tasks that 2nd-level robots must complete. Therefore, in addition to the safety issues that 2nd-level robots have, robots of this level also have safety issues related to task monitoring and allocation at the human-robot-environment system level that are caused by intelligent decision making. Focusing on the safety issues of robots of this level, researchers have conducted studies on the safety system structures of robot systems and intelligent perception systems for robot safety statuses from the human-robot-environment perspective [24-26], establishing the fuzzy critical importance degrees for the bottom events of the human-robot-environment system and a sorting method for the fuzzy critical importance degrees of minimal cut sets, and proposed methods for improving robot safety based on robot safety inspection [26]. The sorting of the fuzzy critical importance degrees of minimal cut sets provides support for fault prediction and monitoring. The monitoring of robot safety provides conditions for curbing safety accidents in a timely fashion. However, as measures for ensuring safety [27], monitoring-based safety strategies are only used to terminate the movements of robots when faults occur; monitoring- based safety strategies do not integrate the safety monitoring information into the intelligent robot control systems and thus do not provide timely intelligent decision-making support for robots to complete system tasks while ensuring the avoidance of accidents. Therefore, the existing safety standards and measures cannot satisfy the safety requirements of massage robots, whose target tasks are to provide treatment, in heavily personalized massage environments.
A massage robot-based treatment system have been developed. The present study introduces the ��intelligent safety�� concept into the research on massage robot safety systems. A safety status feedback system for massage therapy tasks is established using the massage therapy system as the object and the key nodes of the fault tree of the massage therapy system as the parametric variables. The potential massage therapy system faults are analyzed and diagnosed on the basis of the status information of the key nodes. When the massage therapy system is under a condition of uncertainty, the target task of the massage therapy system is completed through modifying the tasks of the subsystems or the structure of the robot control system while ensuring the safety of the system.
2 Materials and methods
2.1 Massage robot-based massage therapy system and task allocation of system
The massage robot-based massage therapy system consists of a massage therapist, a patient, a massage robot system, and a massage environment. The massage robot system consists of an interaction device, an expert system, a control subsystem, and a robot body. The robot body consists of a digital massage platform, a massage manipulator, parallel-series-connected massage heads, a humanoid massage hand, a visual positioning system, and a physiological information acquisition system. As the support structure of the massage therapy system, the digital massage platform supports and adjusts the position of the patient; in addition, the digital massage platform also serves as the installation platform for other systems and provides a movement function with 3 degrees of freedom (3-DOF) for the massage heads as well as an audio playback function. The massage manipulator, which is connected to the digital massage platform and the massage head, provides position control for the massage heads. The parallel-series-connected massage heads have 3-DOF and can realize specific massage manipulations. The humanoid massage hand can simulate the massage manipulation techniques of a massage therapist, such as grasping and finger kneading. The visual positioning system realizes the tracking and detecting of the massage locations on the patient��s body as well as the visual servo function of the massage robot. The physiological information acquisition system acquires the basic physiological information of the patient to analyze the physiological state of the patient and provide a basis for robot safety. The control subsystem accepts and processes the internal and external information of other subsystems, controls the coordinated motion of each subsystem, and realizes intelligent massage operations. Figures 1 and 2 show the framework of the massage therapy system and the physical prototype of the massage robot.
The massage operation process of massage therapy system is as follows:
1) The massage therapist determines the indication of the patient based on the description provided by the patient;
2) The massage therapist designs a personalized massage plan based on the expert database and determines the workflow of the massage platform;
3) The patient lies on the massage bed in the prone position with his head placed in the face cradle;
4) The massage therapist acquires the threshold values of the pain points of the patient using a pain point pressure acquisition sensor to determine the personalized parameters of the massage force;
5) The massage therapist attaches markers, which can be recognized by the massage robot, to the corresponding pressure points on the patient��s body;
6) The massage robot completes the corresponding massage operations (including vibrating, palm kneading, finger pressing, rolling, grasping, etc.) via the massage terminal and the dexterous 3-finger massage hand according to massage process set by massage therapist;
7) The system monitors the physiological signal of the patient in real time during the massage process, and the massage therapist and the patient can disrupt or terminate the massage process through voice or manual operation.
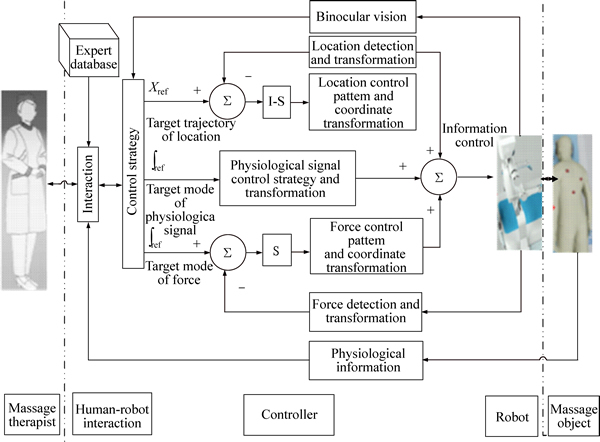
Fig. 1 Framework of massage therapy system
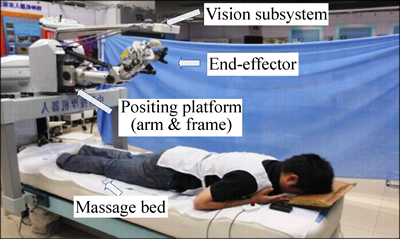
Fig. 2 Physical prototype of massage robot
2.2 Dangerous state and fault analysis of massage robot
2.2.1 Information and energy-interactive model of massage therapy system
Any activity in the human-robot-environment system of massage robot-based massage therapy, in essence, is an information and energy exchange among the human, the robot, and the environment. First, the human perceives the information of the robot and the environment through the interaction device and makes a decision. Then, the human commands the locomotive organs to send control information to the controller of the machine via the interaction device; i.e., the human operates the corresponding actuating mechanisms of the machine to complete various motion functions, and the control effect is reflected on the interaction device. Thus, a closed-loop system of information and energy transfer is formed as shown in Fig. 3.
2.2.2 Potential safety dangers of massage therapy system and manifestations of such potential safety dangers
The massage therapist-patient-massage robot system and the massage environment constitute a human-robot-environment system of massage therapy. In addition to the faults of each component of the system, the potential safety dangers of the system also include the potential faults that can occur during the process of information and energy exchange among the components of the system and the safety relationship between the function output of the entire system and the target task of the system. Based on the task allocation of the massage therapy system, we know that the massage robot conducts an information and energy exchange with the human and the environment in an active mode in the key steps of the massage therapy process.
Potential safety dangers that affect the function output of the massage therapy system and the manifestations of such potential safety dangers. The main attribute of the massage robot-based massage therapy system is that the massage therapist controls the robot to apply a force and motion with a certain rhythm on some particular locations on the surface of the patient��s body to stimulate the patient��s nerves, regulate the patient��s immune system and spur the patient��s physiological function to become normal with the aim of helping the patient heal naturally. Clinically, the massage effect is often evaluated based on the changes in the softness of the soft tissue at the massage location. After an effective massage, the Young��s modulus of the soft tissue at the massage location increases, and the soft tissue becomes softer. If the softness of the soft tissue at the massage location does not change after the massage, then the massage therapy is ineffective. Therefore, the potential safety dangers of the function output of the massage therapy system are manifested as follows: the various internal potential safety dangers of the massage therapy system result in the function output of the massage therapy system not meeting the massage therapy target and the softness parameter of the soft tissue at the massage location does not change.
As a subsystem of the massage therapy system, humans are passive entities in the information and energy interaction. Human errors (i.e., human behavior errors) are concentrated within the range of subsystem tasks and transferred to the massage robot system via the information and energy interaction. Human behavior errors include negligence errors, execution errors, redundancy errors, sequential errors, and temporal errors. The well-known ��technique for human error rate prediction�� provides quantitative analytical steps for human errors. Therefore, the reliability of a certain behavior of a human (R) is:
 (1)
(1)
where R1 represents the input-related reliability, which is the reliability of the information of sound, light, and force perceived by the human through such organs as ears, eyes and skin; R2 represents judgment-related reliability, which is the reliability of the processing and evaluation of the received signals by the human��s brain; and R3 represents output-related reliability, which is the reliability of the reaction made by the human based on the human��s judgment. Table 1 lists the reference values of R1, R2 and R3.
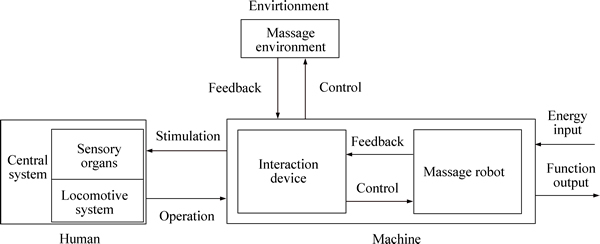
Fig. 3 Information and energy-interactive model of massage therapy system
The error probability of a certain movement of a human is:
 (2)
(2)
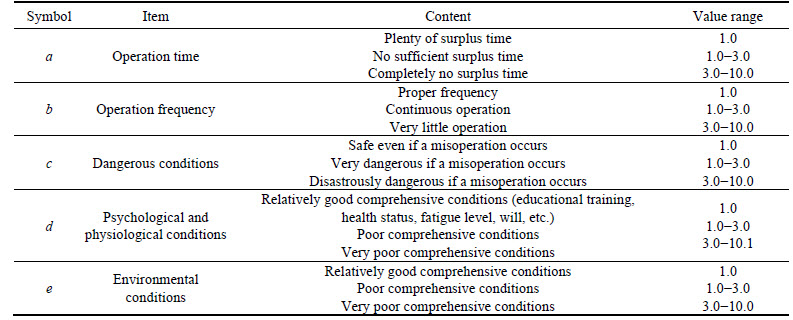
where k represents the behavior coefficient. The table below lists the value ranges of the behavior coefficient of a person. In this regard, k=abcde, where a represents the operation time coefficient; b represents the operation frequency coefficient; c represents the dangerous condition coefficient; d represents the psychological and physiological condition coefficient; and e represents the environmental condition coefficient.
It can be seen from the factors that affect human behavior reliability, and human safety reliability in the massage therapy system is affected by such factors as the massage therapy environment and the professional training of the massage therapist (Table 2). In terms of the task allocation of the massage therapy system, human behavior involves the formulation of the massage therapeutic scheme and the massage parameters. A human behavior error results in the occurrence of a massage therapeutic scheme error, which propagates in the fault direction of the function output of the massage therapy system and eventually becomes an AND-gates structure that, together with the intelligent robot safety system, affects the function output of the system.
In the massage therapy system, the tasks of the massage environment are to play audio files and provide a suitable ambient temperature and suitable ambient lighting. Therefore, massage environment faults are manifested as temperature, lighting, and sound that are not in harmony with the massage environment. Such massage environment faults affect the function output of the system by disrupting the human behavior in the massage therapy system.
In the human-robot-environment system of massage therapy, the potential safety dangers of the massage robot that is the active entity of the information and energy interaction include robot faults (eg, robot joint failures,driver failures, and mechanism deformation), massage therapy system status monitoring faults (eg, positioning sensor failures, force sensor failures, visual tracking sensor failures, biosensor failures, and massage pains�� threshold values acquisition sensor failures), and task execution and control faults of the massage therapy system (eg, controller faults, control algorithm faults, and safety control strategy errors).
Table 1 Reference values of R1, R2 and R3

Table 2 Value ranges of behavior coefficient of a person
The tasks that the massage robot system undertakes, such as the control of the massage therapy system tasks and the monitoring of the massage therapy system status, are related to the function output of the massage therapy system; faults in the execution of the related tasks directly affect the safety of the function output of the massage therapy system. However, robot errors result in the occurrence of fault events that harm the human and terminate the massage tasks.
2.2.3 Analysis of massage robot faults based on fault tree
The fault tree analysis (FTA) technique, which analyzes system faults using logical methods, has the following characteristics: the FTA technique is a visual analysis technique with a clear train of analysis and strong logicality; in addition, the FTA technique can be used to qualitatively and quantitatively analyze system faults. Furthermore, the FTA technique provides mathematical and graphical expression methods for event combinations that result in system failures. In the massage therapy system, the massage robot subsystem, as the active entity of the information and energy interaction, undertakes such tasks as the monitoring of the massage therapy system status, task allocation, and task execution and control. Therefore, the fault nodes of the massage robot are analyzed using the function output fault of the massage therapy system (ineffective massage therapy) as the top event of the fault tree of the massage robot to provide a basis for the intelligent safety control of the robot system.
It can be seen from the fault tree of the massage therapy system (Fig. 4) and the fault tree of the massage robot subsystem (Fig. 5) that the occurrence of the top event of the massage robot (T represents ineffective massage therapy) is jointly induced by the fault event C1 and the intelligent safety system failure event C2 of the massage robot. The fault event C1 of the massage robot is triggered by its child nodes�Cthe human-harming event C11 and the massage therapy target non-realization event C12�Cthrough an OR-gates structure. The massage therapy target non-realization event C12 can be further divided into 2 child nodes, the massage therapy task termination event C121 and the ineffective massage therapy event C122, which triggers the father node through an OR-gates structure. The intelligent safety system failure event C2 of the massage robot includes 4 child nodes (the physiological parameter acquisition fault event s21, the massage pressure parameter acquisition fault event s22, the massage force-induced soft tissue deformation parameter acquisition fault event s23 and the expert system error for massage state evaluation and selection s24), which are connected through an OR-gates structure.
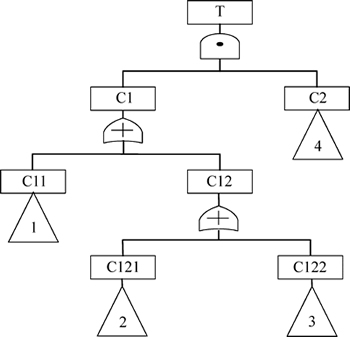
Fig. 4 Structure of fault tree of massage robot
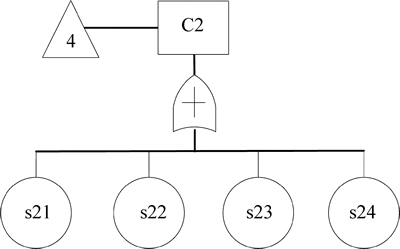
Fig. 5 Fault tree of an intelligent safety system failure event
The analytical results of the fault tree of the massage robot show that there are 4 first-order minimal cut sets of the massage robot: 1) the physiological parameter acquisition fault event; 2) the massage pressure parameter acquisition fault event; 3) the massage force-induced soft tissue deformation parameter acquisition fault event; 4) the system error in the selection of experts for massage state evaluation.
These 4 first-order minimal cut sets form single points of fault that are the weakest links of the massage robot. These 4 events are all related to the intelligent massage robot safety system event, the detection of the massage therapy system fault status and the execution and control of the system tasks. Massage robot faults (e.g., robot sensor faults, robot mechanism faults, controller errors, faults in which the robot harms the human, etc.) are avoided using perfected safety measures, which are formulated based on mature industrial robot safety standards and implementation measures, and the safety of the related links have been strengthened.
2.3 Safety monitoring-based intelligent robot safety system
The safety monitoring-based intelligent robot safety system (Fig. 6) consists of a massage robot, humans (a massage therapist and a patient), a massage environment and an intelligent safety controller. The human completes tasks such as the determination of indications and the therapeutic scheme as well as emergency response. The massage robot performs the specific massage therapeutic scheme. The massage environment adjusts and improves the massage therapeutic effect based on the therapeutic scheme. The intelligent safety controller uses the internal and external sensors of the massage robot to monitor the status and the fault information of the human-robot- environment system of massage therapy and automatically adjusts the tasks and parameters of each component of the human-robot-environment system based on the massage therapy task targets. The intelligent safety controller performs several functions, including fault detection, separation and evaluation, and decision making; the intelligent safety controller intelligently determines system faults that have already occurred and will occur using the information of the key links of the system and the fault tree model of the system; in addition, the intelligent safety controller revises the task allocation and control parameters of the system, screens system faults and their impacts, and intelligently ensures the safety of the system through the decisions made by the system, e.g., through the fault-tolerant control technique.
2.4 Intelligent safety controller design based on fault- tolerant control technique
There are two aspects of the functions of the intelligent safety controller:
1) The intelligent safety controller monitors the status of the massage robot system and determines whether there is a fault in the diagnostic object; if there is a fault in the diagnostic object, then the intelligent safety controller further determines the nature of the fault, the cause of the fault, the type of the fault, and the location where the fault occurs.
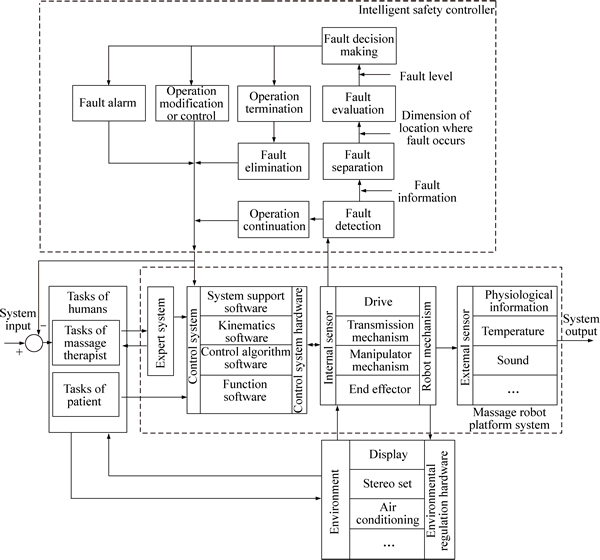
Fig. 6 Structure of intelligent safety system
2) When there is a local fault in the system, the intelligent safety controller adjusts the task allocation and control parameters of each component of the robot to complete the task target.
2.4.1 Setting of massage robot fault points
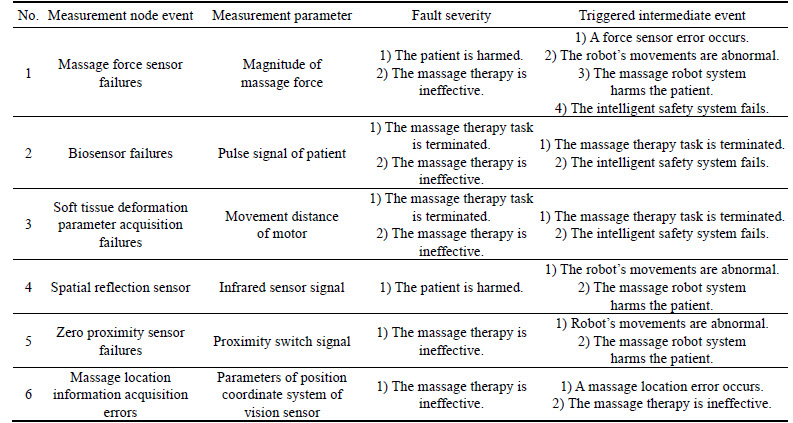
The reliability of the massage therapy system involves human reliability, robot hardware reliability, and robot software reliability. The existing research results show that among the 3 types of reliability, human reliability is the lowest, robot hardware reliability is the highest, and robot software reliability is in between. Therefore, in addition to the weak links of the system that are analyzed using the fault tree, fault inspection points of the massage robot should also be set based on the reliability of the system components as well as on the propagation paths of the faults that occur at the fault inspection points. Fault inspection points are set in the following links of the massage robot. Table 3 shows the setting of the bottom event fault detection points.
2.4.2 Fault diagnosis and identification based on fault tree model
The fault tree model-based fault diagnosis system is a model-based fault diagnosis expert system. The fault tree model-based fault diagnosis system uses the causal relationship between the child nodes and the father node to obtain expert knowledge in fault diagnosis to construct the knowledge base of the expert system. Based on this knowledge base, the fault tree model-based fault diagnosis system determines the possible locations of the fault sources of the system using a certain rule-based inference mechanism, with the fault information of the system serving as the inference premise. The fault tree model reflects the fault propagation paths and directions. The fault sources, located at the bottom layer of the fault tree, trigger the occurrence of the top event via the bottom event, the intermediate event, and the top event. A positive deterministic causal chain is constructed between the child nodes and the father nodes of the fault tree. The child nodes are the deterministic fault sources of the father nodes.
The positive causal relationship of the fault tree is expressed in the following IF-THEN form:
Rule i IF ((AND, OR)(h) i) THEN (c)
where i represents the rule number; ((AND, OR)(h) i) represents the premise of the rule; and (c) represents the conclusion.
Each fault propagation path of the fault tree is a directed edge and corresponds to a rule; the premise of the rule is the start point (child node) of the directed edge, and the conclusion of the rule is the end point (father node) of the directed edge. The fault tree model expresses the positive causal relationship between the child nodes and the father node. The fault tree model uses the abnormal nodes as the start points of inference and uses the information of the measurement points and the fault propagation directions and paths of the fault tree for backward inference to obtain the states of the bottom events to determine the fault sources and their severity. If there are sufficient measurement points, then the states of all the bottom events can be obtained; otherwise, the set of certain fault sources and the set of possible fault sources are given. The set of certain fault sources includes all the bottom events that are in definite states. The set of possible fault sources is a set of the bottom events that are in indefinite states. The elements of the set of certain fault sources and the set of possible fault sources consist of all the bottom events of the fault tree.
Table 3 Setting of bottom event fault detection points
Assumption 1): The father node is triggered by the child nodes (a1, a2, ��, an) in the AND-gates structure, and the father node is in the set of normal nodes; then, the child nodes are all in the set of normal nodes.
Assumption 2): The father node is triggered by the child nodes in the AND-gates structure, and one of the child nodes is in the set of fault nodes; then, the father node is in the set of fault nodes.
Assumption 3): The father node is triggered by the child nodes in the AND-gates structure, the father node is in the set of fault nodes, and all the child nodes are in the set of normal nodes; then, the child node is in the set of fault nodes.
Assumption 4): The father node is triggered by the child nodes in the OR-gates structure, and all the child nodes are in the set of normal nodes; then, the father node is in the set of normal nodes.
Assumption 5): The father node is triggered by the child nodes in the OR-gates structure, and the father node is in the set of fault nodes; then, all the child nodes are in the set of fault nodes.
When a certain node becomes abnormal, it is necessary to determine the location of the fault source using the inference method in Fig. 7.
After performing the above inference for all the rules, 3 new sets��a set of fault nodes, a set of normal nodes, and a set of unknown nodes��can be obtained. The bottom events in the set of fault nodes are used to form possible fault sources, and the bottom events in the set of unknown nodes are used to form possible fault sources to determine the locations of the fault sources.
2.4.3 Massage robot fault decision making based on fault-tolerant technique
Based on the analysis of the massage robot faults, physiological data acquisition faults are some of the weakest links in the system. The emotional state model for physiological parameters shows that there is a strong relationship between the physiological parameters and the emotion of the patient; the physiological parameters can be used to indirectly analyze the reaction of the patient to the massage therapy operation to determine whether the massage therapy parameters are reasonable and whether the massage therapy is effective. The physiological parameters have important significance for the monitoring of the massage robot safety system.
The parameters of a patient, such as heart rate, blood pressure, respiratory rate and body temperature, provide important information on the patient. The physiological state of the patient during the massage therapy process can be determined in real time based on these parameters. The physiological parameter acquisition module converts biomedical signals to electrical signals through the signal detection and preprocessing component. The physiological parameter acquisition module extracts and analyzes the parametric data from the patient��s body through operations such as noise reduction, filtering, and amplification and compares the parametric data from the patient��s body with the preset threshold values to determine the physiological state of the patient and convey the results to the massage robot system and the massage therapist through the communication and display devices.
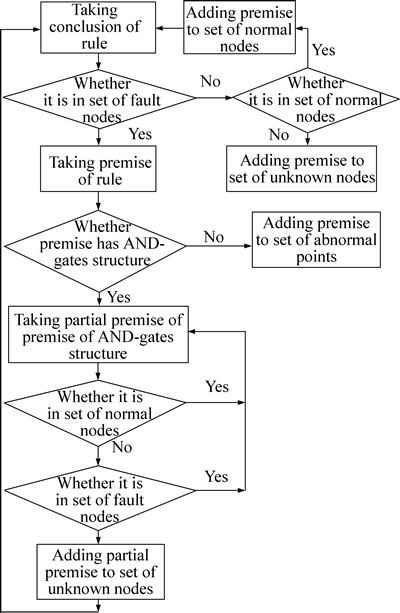
Fig. 7 Inference method to determine location of fault source
A physiological parameter acquisition module only provides information to the massage therapy system unidirectionally and does not accept feedback information. Therefore, hardware redundancy design is used to equip the system with multiple physiological parameter acquisition modules. Before the system starts its massage therapy task, the physiological parameter acquisition modules are first self-inspected and maintained. When a fault occurs in a physiological parameter acquisition module, the physiological parameter acquisition module can be replaced in a timely fashion. Based on the analysis of the massage robot faults, the location information data acquisition faults are some of the weakest links in the system. According to the massage efficacy model, the soft states of the soft tissues at the massage locations on the patient��s body change during the massage, based on which the massage therapeutic effect and the reasonableness of the parameters can be determined.
The Young��s modulus is a parameter that characterizes the soft states of the soft tissues at the massage locations on the patient��s body. From the massage efficacy model established based on the characteristic parameters of soft tissues, the Young��s modulus is closely related to massage force and deformation. The deformation parameter can be described using movement distance. The examination of the joints of the massage robot has high accuracy and real-timeliness that are higher than those of visual position tracking. In addition, each joint of the robot is connected to the movement output of the robot in series; thus, the failure of any sensor will have an impact on the occurrence of robot safety faults. Therefore, the direct massage movement distance acquisition structure is used for the massage robot, and the visual position tracking data are used as the redundancy scheme; when the occurrence of a movement fault is detected, the robot separates and reduces the impact caused by the fault through analyzing the parameters of the visual position tracking sensor.
3 Experimental study
3.1 Analytical fault-tolerant experiment on soft tissue deformation parameter acquisition device
The visual tracking sensor is used as the analytical redundancy device for the soft tissue deformation parameter acquisition device. In the massage robot subsystem, the main task of the visual tracking sensor is to acquire the coordinate parameters of the massage locations and the coordinate parameters of the end of the massage hand, which are used to guide the massage robot to search for the locations where massage operations need to be performed. There is a certain relationship between the relative locations of 2 markers and the soft tissue deformation parameters in the vector direction of the massage force. Therefore, the accuracy of the relative distance between the coordinate parameters of the marker at the massage location acquired by the visual tracking sensor and the coordinate parameters of the marker at the end of the massage hand is the key to the analytical fault-tolerant feasibility of the soft tissue deformation parameter acquisition device.
The accuracy measurement experimental platform (Fig. 8) consists of a single-dimensional motion unit (consisting of a single-dimensional motion platform, a stepping motor driver and a motion controller), a binocular vision sensor, and a target marker (fixed onto the one-dimensional motion platform). The massage robot tracks the movement of the target marker.
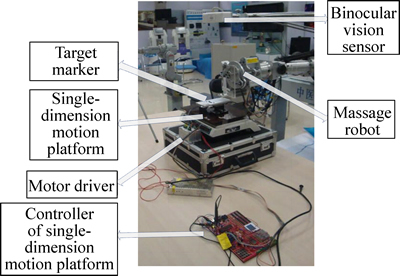
Fig. 8 Accuracy measurement experimental platform
The experimental process is as follows: 1) the target marker is fixed on the single-dimensional motion platform; 2) the single-dimensional motion platform is controlled to move to an arbitrary point within the visual range of the robot; 3) the tracking program of the massage robot is initiated to track the target marker; 4) the tracking program records the deviation value of each sample during the process; 5) the data obtained after the stabilized tracking are processed. The tracking program records the deviation value obtained from each sampling as shown in Fig. 9. The obtained data are processed to obtain the error value E=0.26��0.27.
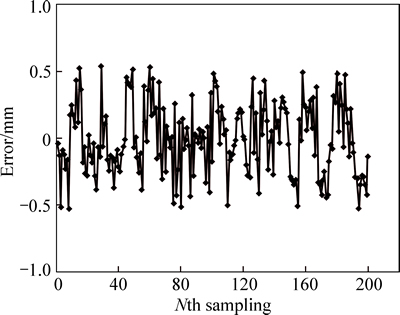
Fig. 9 Tracking errors obtained from visual tracking
3.2 Clinical massage experiment
According to the operation process of the massage robot-based massage therapy system described in Section 2.1, massage therapy was performed on 20 patients with lumbar muscle strain. The softness parameter of the soft tissue at the same massage location on each patient��s body was acquired before and after the massage using a soft tissue tension tester (ZL 02253003.7) (a soft tissue measurement instrument that is often used in clinical massage therapy) and the accompanying analytical system to analyze the therapeutic effect of the massage.
The soft tissue tension tester consists of a force sensor and a displacement sensor. The force sensor is used to measure the pressure on the soft tissue; the displacement sensor is used to measure the soft tissue deformation amount under the corresponding pressure; the pressure and the corresponding soft tissue deformation amount are plotted in a 2-dimensional coordinate system to form a loading-unloading curve. The soft tissue deformation amount under a pressure of 200 g is defined as L. The ratio of the area between the loading curve and the unloading curve to the area below the loading curve is defined as R. L reflects the softness of the soft tissue and R reflects the energy loss of the soft tissue during the loading and unloading process. The greater L is, the softer the soft tissue is. The greater R is, the greater the energy loss is and the poorer the elasticity of the soft tissue is. The displacements are compared under a load of 1.96 N and the fraction of the absorbed energy. The results are shown in Table 4.
Figure 10 shows the data of 2 of the 20 patients. It can be seen that for both Case 1 and Case 2, there are significant increases in the L and R values after the therapy. Therefore, the massage robot could provide a relatively good massage effect.
Table 4 Displacement and fraction before and after therapy
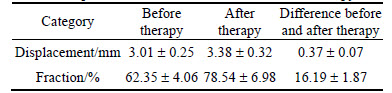
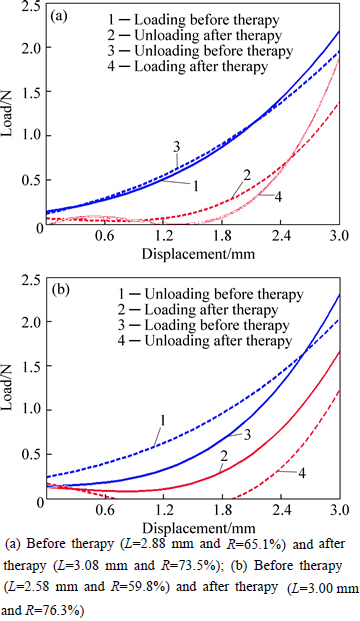
Fig. 10 Data of patients:
4 Discussion and conclusions
The development trend of robots is characterized by robots�� entry into human-robot society to serve humans. With the development of intelligent robot control techniques, robots will undertake increasingly active interaction tasks during the interaction process with humans. Therefore, robot safety in the process of serving humans is an issue in robot application that must be urgently addressed. In addition, the definition of robot safety must also be expanded from the ��robots do not harm humans�� principle to take into account the safety and reliability of controlling a robot and the robot��s human-robot-environment system to realize the target tasks of the system. The present study uses the fault tree model to obtain expert knowledge regarding robots monitoring human-robot-environment system fault statuses and establishes a fault tolerant technique-based intelligent safety controller for massage robots through setting reasonable fault monitoring points. In addition, the present study proposes a fault monitoring-based intelligent robot safety system and verifies the feasibility of the proposed intelligent robot safety system using a massage robot; the proposed intelligent robot safety system provides a feasible method for improving robot safety in a human-robot coexisting society.
To verify the accuracy of the theoretical analysis, an analytical fault-tolerant experiment was conducted on the soft tissue deformation parameter acquisition device and clinical massage experiments. The results of the analytical fault-tolerant experiment on the soft tissue deformation parameter acquisition device show that the relative distance between the parameter coordinates of the marker at the massage location and the coordinates of the marker on the end of the massage hand acquired by the visual tracking sensor have relatively high accuracy and that the maximum static tracking error of the system is 0.428 mm, which satisfies the measurement accuracy requirement of the soft tissue deformation parameters. Twenty clinical experiments are completed, all of which are successful. The clinical experiments prove that the massage robot can complete safe and effective massage operations. The comparison between the displacements under a load of 1.96 N before and after the therapy and the comparison between the fractions of the absorbed energy in the work before and after the therapy shows that the massage robot can provide a remarkable therapeutic effect and can fully relax the waist of each patient.
Research on the intelligent safety mechanisms of massage robots is very important for ensuring the safety of patients and robots. An even more thorough study will be planed to conduct in the next step based on the findings of the present study. In addition, the correctness of the theory will be verified through more massage robot experiments.
References
[1] WU Hai-bin, YANG Jian-ming. Progress in robot safety research during human-robot interaction [J]. China Safety Science Journal, 2011, 21(11): 79-86. (in Chinese)
[2] HU Zheng. Review of robotic safety engineering [J]. China Mechanical Engineering, 2004, 15(4): 370-375. (in Chinese)
[3] AUGUSTSSON S, CHRISTIERNIN L G, BOLMSJ G. Human and robot interaction based on safety zones in a shared work environment [C]// HRI '14: Proceedings of the 2014 ACM/IEEE international conference on Human-robot interaction. New York, NY: ACM; Piscataway, NJ: IEEE, 2014: 118-119.
[4] WANG Ke-yi, ZHANG Li-xun. Driving properties of plane wire-driven robot [J]. Journal of Central South University, 2013, 20(1): 56-61.
[5] ZOU Yu-peng, ZHANG Li-xun, MA Hui-zi, QIN Tao. Hybrid force control of astronaut rehabilitative training robot under active loading mode [J]. Journal of Central South University, 2014, 21(11): 4121-4132.
[6] SANDERS M, BRODT P, WENTWORTH R. Safety in the industrial robot environment [C]// University Programs in Computer- Aided Engineering, Design, and Manufacturing. Reston, Virginia: ASCE, 1989:190 �C197.
[7] HADDADIN S, ALBU-SCHAFFER A, STROHMAYR M. Injury evaluation of human-robot impacts [C]// Robotics and Automation, ICRA 2008. Piscataway, NJ: IEEE, 2008: 2203-2204.
[8] KIM H, KIM I, CHO C, SON J. Safe joint module for safe robot arm based on passive and active compliance method [J]. Mechatronics, 2012, 22(7): 1023-1030.
[9] PARMIGGIANI A, RANDAZZO M, NATALE L, METTA G. Analternative approach to robot safety [C]// Intelligent Robots and Systems (IROS 2014), 2014 IEEE/RSJ International Conference on. Piscataway, NJ: IEEE, 2014: 484-489.
[10] LI Jing, MA Yuan-sheng, LIANG Fang-hua. Analysis on quoted standards in industrial products manufacture licenses implementation rules [J]. Standard Science, 2014(5): 34-37.
[11] FRYMAN J. Updating the industrial robot safety standard [C]// ISR/Robotik 2014; 41st International Symposium on Robotics; Proceedings of VDE. Piscataway, NJ: IEEE, 2014: 1-4.
[12] CHEN Sheng-jun. Research on some basic problems concerning our space robot�� srsm [J]. ROBOT, 2002, 24(5): 471-474. (in Chinese)
[13] SHU S. An universal heuristic method for solving the redundancy optimization problems [J]. Acta Automatica Sinica, 2000, 26(5): 74-76.
[14] Shu Song-jia. A precision method for optimizing the reliability of a redundant control system and its application [C]// IEEE International Conference on Systems Engineering. Piscataway, NJ: IEEE, 2000: 123-125.
[15] HU Lei, LIU Wen-yong, XU Ying, WAGN Yu. Functional redundancy-based safety strategies for orthopaedic robots [J]. Chinese High Technology Letters, 2006, 16(10): 1019-1024. (in Chinese)
[16] SHU Song-jia. The synthesis of the most reliable control systems [J]. Acta Automatica Sinica, 1980, 6(1): 8-9.
[17] LAIBLE U,  T, PRITSCHOW G. A fail-safe dual channel robot control for surgery applications [J]. Safety Science, 2001, 2187(5): 75-85.
T, PRITSCHOW G. A fail-safe dual channel robot control for surgery applications [J]. Safety Science, 2001, 2187(5): 75-85.
[18] BICCHI A, TONIETTI G. Fast and" soft-arm" tactics [robot arm design] [J]. Robotics & Automation Magazine, 2004, 11(2): 22-33.
[19] ZINN O, SALISBURT J. A new actuation approach for human friendly robot design [J]. The International Journal of Robotics Research. 2003, 23: 379-398.
[20] CHENG Y, ZHU Z L, GAO J L. A compensator design for system integrity against actuator failure [J]. Acta Automatica Sinica, 1990, 16(4): 297-301.
[21] MOTAMED C, SCHMITT. A vision based safety device for uncontrolled robotic environments [C]// Systems Engineering in the Service of Humans, International Conference on. Piscataway, NJ: IEEE, 1993: 528-533.
[22] ABDALLAH A, MOTAMED C, SCHMITT A. Change detection for human safety in robotic environments [C]// SPIE's 1994 International Symposium on Optics, Imaging, and Instrumentation. International Society for Optics and Brussels, Belgium: Photonics, 1994: 357-361.
[23] STENTZ A, HEBERT M. A complete navigation system for goal acquisition in unknown environments [J]. Autonomous Robots, 1995, 2: 127-145.
[24] 
 A, TORRES-MORENO J. A flexible multibody model of a safety robot arm for experimental validation and analysis of design parameters [J]. Journal of Computational and Nonlinear Dynamics, 2014, 9(1): 011003.
A, TORRES-MORENO J. A flexible multibody model of a safety robot arm for experimental validation and analysis of design parameters [J]. Journal of Computational and Nonlinear Dynamics, 2014, 9(1): 011003.
[25] MICHALOS G, MAKRIS S, SPILIOTOPOULOS J, MISIOS I, TSAROUCHI P, CHRYSSOLOURIS G. Robo-partner: Seamless human-robot cooperation for Intelligent, flexible and safe operations in the assembly factories of the future [C]// Procedia CIRP. Amsterdam: Elsevier, 2014, 23: 71-76.
[26] KULI D, CROFT E A. Real-time safety for human�Crobot interaction [J]. Robotics and Autonomous Systems, 2006, 54(1): 1-12.
[27] BDIWI M. Integrated sensors system for human safety during cooperating with industrial robots for handing-over and assembling tasks [C]// Procedia CIRP, 2014, 23: 65-70.
(Edited by FANG Jing-hua)
Received date: 2015-05-26; Accepted date: 2015-11-15
Corresponding author: HU Ning; Tel: +86-17801098570; E-mail: huning302@163.com

