欠驱动手指机构研究现状
吴立成1,杨国胜1,孙增圻2
(1. 中央民族大学 信息工程学院,北京,100081;
2. 清华大学 计算机系 智能技术与系统国家重点实验室,北京,100084)
摘要:对欠驱动手指机构及其设计与分析等方面的理论研究现状进行文献综述和详细的分析,指出有待进一步研究的关键问题。在此基础上对欠驱动手指机构的下一步研究进行了展望。
关键词:机器人手指;欠驱动手指机构;研究现状
中图分类号:TP24 文献标志码:A 文章编号:1672-7207(2011)S1-0417-06
Review on underactuated finger mechanism
WU Li-cheng1, YANG Guo-sheng1, SUN Zeng-qi2
(1. School of Information Engineering, Minzu University of China, Beijing 100081, China;
2. State Key Lab of Intelligent Technology and Systems, Department of Computer Science and Technology,
Tsinghua University, Beijing 100084, China)
Abstract: The researches about underactuated finger mechanism and it’s design and analyse theory were reviewed. Current primary unsolved problems was also pointed out. In addition, some important future research directions were proposed.
Key words: robotic finger, underactuated finger mechanism, state of the art
机器人的各项功能一般都要通过手部操作来完成,灵巧手是机器人的重要组成部分。一方面,机器人手具有较好的性能和较高的拟人化程度,应具有较多的关节自由度。但另一方面,为降低拟人机器人手的控制难度并减小手的体积和质量,需要减少驱动器数目。采用驱动器少于关节自由度的欠驱动手指机构(Underactuated finger mechanism)设计机器人手指,可同时满足这2方面的要求,还可使机器人手指能够自适应地抓取不同形状和尺寸的物体。因此,欠驱动手指机构成为一个重要的研究方向。欠驱动机器人手指一般可采用腱驱动、摩擦轮或特殊连杆机构等方式来实现。其中,腱驱动或摩擦轮实现的欠驱动手指只能实现较小的抓持力。为实现结构紧凑、大抓持力的欠驱动拟人手指,必须采用欠驱动连杆机构来设计和制作机器人手指。但目前各种连杆式欠驱动多指手都还存在机构复杂、体积大、制造维修成本高等缺点[1]。此外,欠驱动手指机构复杂,并带有弹性元件,其分析与设计的理论和技术也亟待进一步完善。研究欠驱动手指机构及其分析与设计理论,实现的结构紧凑、抓持力大、操作简单的新型欠驱动机器人手指,在工业机器人、拟人机器人、人体假肢及航天机器人等领域都具有广泛的应用前景。本文作者对欠驱动手指机构的研究现状及发展动态进行了分析,并提出了下一步研究的方向和相关研究的技术方案。
1 典型的欠驱动手指机构
国内外对于机器人灵巧手的研究已有30多年的历史,研制成功了许多各具特色的灵巧手。但目前多指灵巧手存在的主要问题是机构复杂、控制要求高、成本高,操作使用需要专业知识,因此,至今机器人多指灵巧手仍停留在实验室,达不到实用化的要求。为实现低成本、操作简单的灵巧手,许多学者开始尝试使用欠驱动机构来设计机器人手指。
欠驱动手指设计方案中常用机构包括差动机构(行星齿轮差动机构、滑轮差动机构)、力矩开关(Torque switch)机构、基于弹性机械元件和机械限位的连杆机构。目前的欠驱动机器人手指中,腱驱动和连杆机构是最主要的2类机构。其中,腱驱动手指机构最早为Mullen[2]在1972年设计成功。此后,Crisman等[3]也申请了一个相关专利。Massa等[4-6]研制的康复假手SPRING中也采用了一种腱驱动手指。Cabas等[7]提出了一种采用非圆滑轮来优化腱驱动手指性能的方法。Krut[8]提出了具有“力等方”特性的腱驱动手指。典型的腱驱动手指机构,结构紧凑(如图1(a)所示)。但由于腱驱动会引起机构中的关节摩擦力增大,以及在工作中腱本身受拉力产生的弹性变形,因此这种腱驱动欠驱动机构只能应用于负载较小,对手指接触力要求不大的场合[9]。摩擦轮驱动的手指也存在同样的问题。为实现较大的抓持力,就必须采用连杆机构来设计欠驱动机器人手指。在连杆式欠驱动手指机构的研究方面,Gosselin等[10]于1998年申请了一项美国专利,并对其进行了改进[11]。仿健驱动机制的连杆式欠驱动手指机构如图1(b)所示,该机构用连杆模拟了腱驱动手指的运动机制,采用该机构制作的手指如图1(c)所示。该机构的缺点在于结构不够紧凑,因此指节的尺寸较大,无法实现仿人指尺寸的机器人手指。此外,张文增 等[12]研制的TH-1手和TH-2手也采用了欠驱动手指机构。TH-1手的拇指机构通过一个含弹簧的被动移动副来实现欠驱动操作,TH-2手使结构更紧凑[13](如图1(d)所示)。该机构存在的主要问题是齿条安装在手指的高度方向,决定了齿条的平动行程非常有限,为了实现下一指节的有效转动,齿轮和齿条必须有非常大的传动比,导致指节上很小的抓持力都需要非常大的电机驱动力才能实现。一般情况下,手指能实现的抓持力很小,甚至不如腱驱动手指,并且随着指节数的增加,电机驱动力量指数性增大,因此该机构实际上难以用于2个以上指节的手指。而一般机器人除拇指外,手指至少采用3指节才比较合适。此外,Begoc等[14]提出了一种气动驱动的机器人手指(如图1(g)所示)。该手指与差动传动实现自适应抓持相类似,通过气体的自动分配,也可实现对不同物体的自适应抓持。但气动系统体积质量大,控制复杂。吴立成等[15]提出了一种8连杆欠驱动手指机构(如图1(e)所示)。该机构结构紧凑,可实现大的抓持力,其按照人类手指的外形尺寸完成的一种设计(如图1(f)所示)。但该机构目前存在的问题是包含1个滑移关节,不利于制作和维护。
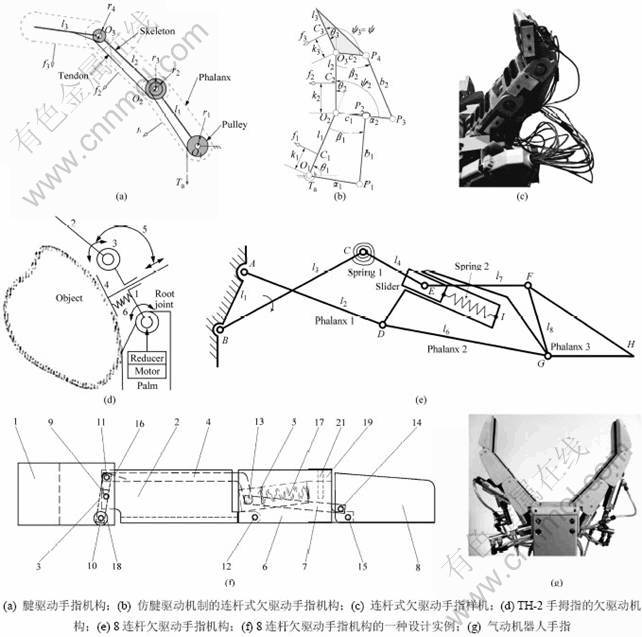
图1 典型的欠驱动手指机构
Fig.1 Typical underactuated finger mechanisms
采用含有非驱动关节的运动链也可形成欠驱动机械手。这种机械手一般包含2个或3个关节,由电机驱动1个主动关节,其余的关节处有抱闸之类的制动器装置。它的工作原理是利用动力学耦合控制关节到预定的位置,再利用制动装置固定抓取构形,完成夹持或抓取。目前研究较多的是Pendubot的被动关节,虽然具有简单的机械结构,但是控制复杂,与机器人安全、可靠、控制简单的要求相违背。更重要的是这种关节虽然能够适应物体的形状,但未驱动关节不能施加主动力,难以实施稳定的抓持,因此实际上无法用于机器人手指[16]。
国内外还有一些少自由度全驱动的机器人手指被误称为欠驱动手指。例如Dechev等[17]研制的TBM手每个手指只有1个驱动器,但手指机构的自由度也是1个,不是真正的欠驱动。目前国内有些所谓的“欠驱动多指手”实际上也是通过机械耦合方式的少自由度全驱动灵巧手。
2 欠驱动手指机构的设计与分析
在欠驱动手指机构的设计与分析等方面,Zollo等[18]提出了一种以手指运动仿生人指的自然运动为设计目标的机器人手指设计方法。Laliberte等[19]讨论了2自由度欠驱动手指的体系结构,并提出了一个分析欠驱动手指行为的仿真工具。骆敏舟等[22]对三指手抓物时抓持特性进行了分析。吴立成等[23-24]完成了所提出8连杆欠驱动手指机构的运动学建模与静力学分析,初步探讨了等价机构内在机制及其导出方法,采用Matlab进行了仿真分析,并完成了该机构的机械设计及自适应抓持不同形状和大小物体的动力学仿真。Nava Rodriguez等[25]提出了一种仿人机器人手指尺寸设计的优化设计方法,该方法以手指运动仿生人指的自然运动等目标的加权和为总优化目标,通过对机构尺寸搜索寻优来完成尺寸设计,方法的适用性和效果都还有待提高。目前,连杆式欠驱动手指的设计都还是凭直觉、仿生或根据计算机仿真结果对设计进行调整等方法来进行,相关的设计理论还很缺乏[20]。
由于驱动器少于运动自由度,因此欠驱动手指各指节对物体的抓持力必然无法独立调节。此外由于欠驱动手指机构本身含有弹性元件,当指节处的接触力较大时,手指将出现回卷现象[20],导致抓持位形被破坏,甚至将物体弹出。这些因素对欠驱动手指的抓持性能有决定性的影响,但目前在连杆式欠驱动手指的力学性能及抓持稳定性分析方面,相关研究还非常少。以往对于灵巧手抓持稳定性的研究实质上讨论的是被抓物体在不同抓持位形和各指节抓持力分配情况下的稳定性问题,而对于包含弹性元件的欠驱动手指,还应该讨论手指机构本身的稳定性。只有物体和手指机构都保持稳定时,才是稳定的抓持。欠驱动手指出现的回卷现象是机构本身失稳的结果,应该通过对欠驱动机构本身的稳定性分析来进行研究。Birglen等[20]讨论了驱动力和抓持力之间的关系,其所用的雅可比矩阵推导方法只适用于本类型机构,无法用于其他类型欠驱动手指机构;提出了分析2指节欠驱动手指抓持稳定性的一种思路。还提出了计算某个抓持位形能否在驱动力加大时保持稳定(即不回卷)的方法。但其研究没有明确讨论手指机构的稳定性问题,而且由于相关研究的前提是忽略弹簧作用力,因此其结论有很大局限性。
在手指表面覆盖摩擦力大的柔软材料,形成指节与物体的面接触,对于克服回卷,增加抓持稳定性大有裨益。但表面材料的变形不利于精确控制被抓物体的位姿。摩擦力与欠驱动手指抓持稳定性关系,尤其是定量关系,还有待进一步的理论研究。
3 研究展望
综上所述,目前在欠驱动手指机构的设计与分析等方面的理论研究还很欠缺,需要进一步研究。另一方面,现有欠驱动手指机构都还存在一定的缺陷,有必要研究新型的欠驱动手指机构。本文提出的下一步研究重点及相关研究的技术方案。
(1) 研究欠驱动手指机构等价机构及基于等价机构的设计方法。研究和分析欠驱动手指机构由于弹簧元件的作用,在抓持过程的不同阶段等价于一个单自由度简单机构的内在机制。研究导出不同抓持阶段的等价机构的方法。研究基于等价机构的欠驱动手指机构尺寸设计方法。
一方面,弹性元件连接的被动关节不受外力时,如忽略惯性力,该关节无运动,相当于前后杆件固接。另一方面,当某指节抓持到物体时,其运动受到物体的约束,进而约束手指机构的相关关节[23]。分析不同抓持状态(如全指节自由、单指节抓持、某几个指节抓持、全指节抓持等)下弹簧受力及指节运动受约束的情况,通过将相关关节固接导出等价机构。建立完整的抓持状态与等价机构表。给定手指外形尺寸,以可达空间(手指机构最大行程决定的手指运动的最大空 间[24])最大化为主要设计指标,并考虑手指的拟人性、传动效率等方面的影响因素。按照从最接近手掌的指节到最远端指节的顺序,依次设计该指节自由运动时的单自由度等价机构,直到完成整个欠驱动手指机构的尺寸设计。
(2) 研究欠驱动手指机构抓持力分析方法及弹性元件的参数设计方法。目前欠驱动手指机构的初始状态一般都简单地设定为手指平伸,机构中弹性元件在初始状态下(即手指平伸时)的弹力为0。但观察人类和其他生物可以发现,生物手指在平静状态下并不是平伸的,而是处于平伸和紧握状态之间。因此手指在平伸时,手指中的弹性元件有一定的预紧力。虽然抓持较大物体时,须先克服预紧力来张开手指,但实现抓持后弹性元件的预紧力能辅助抓持。预紧力对手指力学性能的影响,尤其是其与抓持稳定性的关系是一个值得研究的问题。
因此,下一步应研究抓持力与驱动力和弹力之间雅可比矩阵的推导方法,定义并研究手指机构的抓持稳定性,研究抓持位形与抓持稳定性之间的关系,并研究弹性元件参数及其预紧力(手指平伸时弹簧产生的弹力)与抓持力和抓持稳定性的关系。提出欠驱动手指机构弹性元件参数及其预紧力的设计方法。
抓持力与驱动力和弹力之间的雅可比矩阵可依据其物理意义,采用独立关节激励法来推导。通过分析欠驱动手指机构本身的受力稳定性,导出抓持位形与抓持稳定性之间的关系,进而导出可达空间中抓持稳定子空间。将弹簧系数及初始行程代入雅可比矩阵,导出它们与抓持力的显性关系式,进而研究预紧力与抓持稳定性的关系。依据上述关系,以典型全接触抓持位形下抓持力可调幅度最优为目标设计弹簧系数及预紧力(即初始行程)。
(3) 人手抓持和抓握的运动机理分析和欠驱动手指机构的变拓扑机构型综合。通过分析人类手指解剖学结构和观察其实际运动状况,建立更加精确的人类手指运动模型,在对人手指行为结构特征以及抓握动作的自适应运动机理和不同驱动方式切换的变拓扑分析的基础上,从中发掘人手指抓持和抓握中的欠驱动运动规律。为此进行人手指运动识别,建立人手指精确抓持和动力抓持运动识别系统,考虑欠驱动手指机构运动拓扑结构与控制操作性融合的途径,使机器人手指机构再现人手抓持运动机理和不同驱动方式的切换,以较少的驱动器实现尽可能多的关节运动,在不增加手指轮廓和重量的前提下提高其运动灵活性和可操作度。
(4) 欠驱动手指机构非完整系统运动学分析和力分析。包括欠驱动单手指机构运动学分析和力分析以及在此对整个欠驱动灵巧手系统的运动学、静力学和动力学分析。研究含曲面高副点接触的运动学和动力学输入输出关系及相应正逆解算法,为控制策略提供基础。欠驱动方式使系统具有二阶非完整性,这一方面增加了建模和控制的难度,另一方面也为优化手指的抓持规划提供了更为广阔的空间。
研究针对不同物理性质物体的精确抓持和动力抓持动力学建模与参数辨识的创新理论与方法,进行面向位置/力混合控制的机构模块化设计及优化等问题的研究,以及复杂环境下手指机构冗余问题和容错问题研究。包括物体目标识别以及自主定位的基础理论方法和关键实现技术。研究故障状态下的系统自重构与保成本可靠控制(Reliable control)等。
(5) 研制新型欠驱动手指的原理样机并实施相关的科学试验。采用转动关节代替目前8连杆欠驱动手指机构(如图1(e)所示)中存在的滑移关节,研制新型的全转动关节连杆式欠驱动手指机构。可在继承原机构优点的基础上,降低制造成本和提高可维护性。研究过程应注意对系统运动学、动力学、运动规划与控制等问题的数字仿真与实验研究,并采用对系统硬件在环的半物理仿真以提高关键问题仿真的可信度。硬件方案可以是采用嵌入式ARM技术的微处理器和DSP器件组成两级控制系统,充分利用ARM芯片系统管理和控制性能和DSP处理速度快的特点。同时在ARM中植入嵌入式操作系统ARM-Linux,利用Linux系统强大的网络功能,使手指控制系统随时能接入以太网,即插即用,方便对手指的远程监测和控制,可以利用无线局域网将各单个手指的状态信息打包上传主控计算机和PC机,以便运行更加复杂的控制算法。
4 结论
本文对目前典型的欠驱动手指机构进行了讨论,对其分析与设计理论的现状进行了分析和综述,着重指出了现有研究的不足和有待进一步研究的关键问题。在此基础上对欠驱动手指机构的下一步研究重点进行了展望,并初步提出了相关的研究方案。
参考文献:
[1] Ceccarelli M, Tavolieri C, Lu Z. Design considerations for underactuated grasp with a one D.O.F. anthropomorphic finger mechanism[C]//Proc of IEEE/RSJ Inter Conference on Intelligent Robots and Systems. Beijing: 2006: 1611-1616.
[2] Mullen J F. Mechanical hand: USA, US 3694021[P]. 1972-09-26.
[3] Crisman J D, Kanojia C, Zeid I. Robot arm end effector: USA, US 5570920[P]. 1996-11-05.
[4] Massa B, Roccella S, Carrozza M C, et al. Design and development of an underactuated prosthetic hand[C]//Proc of the 2002 IEEE International Conference on Robotics & Automation. Washington DC, 2002: 3374-3379.
[5] Carrozza M C, Suppo C, Sebastiani F, et al. The SPRING hand: development of a self-adaptive prosthesis for restoring natural grasping[J]. Autonomous Robots, 2004, 16: 125-141.
[6] Carrozza M C, Cappiello G, Stellin G, et al. A cosmetic prosthetic hand with tendon driven under-actuated mechanism and compliant joints: ongoing research and preliminary results[C]// Proc of the 2005 IEEE International Conference on Robotics and Automation (ICRA 2005). Barcelona, 2005: 2661-2666.
[7] Cabas R, Cabas L M, Balaguer C. Optimized design of the underactuated robotic hand[C]//Proc of the 2006 IEEE International Conference on Robotics and Automation (ICRA 2006). Orlando, 2006: 982-987.
[8] Krut S. A force-isotropic underactuated finger[C]//Proc of the 2005 IEEE International Conference on Robotics and Automation (ICRA 2005). Barcelona, 2005: 2314-2319.
[9] Ceccarelli M. Fundamentals of Mechanics of Robotic Manipulation, Dordrecht[M]. Dordrecht Netherlands: Kluwer Academic Publishers, 2004: 241-298.
[10] Gosselin C, Laliberte T. Underactuated mechanical finger with return actuation: USA, US 5762390[P]. 1998-06-09.
[11] Laliberte T, Gosselin C. Actuation system for highly underactuated gripping mechanism: USA, US 6505870[P]. 2003-01-14.
[12] 张文增, 陈强, 孙振国, 等. 变抓取力的欠驱动拟人机器人手[J]. 清华大学学报: 自然科学版, 2003, 43(8): 1143-1147.
ZHANG Wen-zeng, CHEN Qiang, SUN Zhen-guo, et al. Underactuated humanoid robot hand with changeable grasping force[J]. Journal of Tsinghua University: Sci & Tech, 2003, 43(8): 1143-1147.
[13] Zhang Wen-zeng, CHEN Qiang, SUN Zhen-guo, et al. Passive adaptive grasp multi-fingered humanoid robot hand with high under-actuated function[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Automation. New Orleans, LA, 2004: 2216-2221.
[14] Bégoc V, Krut S, Dombre E, et al. Mechanical design of a new pneumatically driven underactuated hand[C]//2007 IEEE International Conference on Robotics and Automation. Roma, 2007: 927-933.
[15] WU Li-cheng, Giuseppe Carbone, Marco Ceccarelli, et al. Problems and a Design Solution for An Underactuated Finger Mechanism[C]//Proceedings of the International Conference on Information Computing and Automation (ICICA’07). Chengdu, 2007: 373-376.
[16] Fantoni I E, Lozano R, Spong W M. Energy control of the Pendubot[J]. IEEE Transactions on Automatic Control, 2000, 45(4): 725-729.
[17] Dechev N, Cleghorn W L, Naumann S. Multiple finger, passive adaptive grasp prosthetic hand[J]. Mechanism and Machine Theory, 2001, 36: 1157-1173.
[18] Zollo L, Roccella S, Guglielmelli E, et al. Biomechatronic design and control of an anthropomorphic artificial hand for prosthetic and robotic applications[J]. IEEE/ASME Transactions on mechatronics, 2007: 12(4): 418-429.
[19] Laliberte T, Gosselin C M. Simulation and design of underactuated mechanical hands[J]. Mechanism and Machine Theory, 1998, 33: 39-57.
[20] Birglen L, and Gosselin C. M., Kinetostatic analysis of underactuated fingers[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 211-221.
[21] Birglen L, Gosselin C M. Grasp-state plane analysis of two-phalanx underactuated fingers[J]. Mechanism and Machine Theory, 2006, 41: 807-822.
[22] Luo M, Mei T, Wang X, et al. Grasp characteristics of an underactuated robot hand[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Automation. New Orleans, 2004: 2236-2241.
[23] WU Li-cheng, Giuseppe C, Marco C. Designing an underactuated mechanism for a 1 active DOF finger operation[J]. Mechanism and Machine Theory, 2009, 44(2): 336-348.
[24] WU Li-cheng, Marco C. A numerical simulation for design and operation of an underactuated finger mechanism for LARM hand[J]. Mechanics Based Design of Structures and Machines, 2009, 37(1): 86-112.
[25] Nava Rodriguez N E, Carbone G, Ceccarelli M. Optimal design of driving mechanism in a 1-DOF anthropomorphic finger[J]. Mechanism and Machine Theory, 2006, 41: 897-911.
(编辑 赵俊)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:中央民族大学自主科研计划项目(0910KYZY52);国家自然科学基金资助项目(60875062,61004023);教育部科技重点项目(211212);人力资源和社会保障部留学人员科技活动项目(2010)
通信作者:吴立成(1972-),男,江西宜春人,博士,副教授,从事机器人、智能系统等研究;电话:010-68931648;E-mail:wulicheng@tsinghua.edu.cn

