���������滮��·���յ�����
����1,2�����и�2������1������1
(1. ���ϳ���ѧԺ ��ľ����ѧԺ������ ������413000��
2. ��ɳ������ѧ ��ͨ���乤��ѧԺ������ ��ɳ��410004)
ժҪ�����·���յ������м�ʻԱ�ĸ��Ի��������һ�ֻ��������滮��·���յ����������ȣ����������滮�����Ļ���˼�룬�����ܹ���ӳ��ʻԱ����ƫ�õ�·���յ�ģ�ͣ���������·�����۵�ָ����ϵ�����ƫ�ú�������ѧ����ʽ�Լ������Ӧ��ƫ�����ӣ�Ϊ·���յ��ṩ��ģ�ͻ�����Ȼ���ڹ�����ͨ·�����ݿ�Ļ����ϣ�ͨ����ƺ��ʵĴ��ۺ���������A*�㷨�����õ�һ���ܹ���ӳ��ʻԱ����ƫ�õ�����·������������������������Ƶ�·���յ������ܹ������ʻԱ�ĸ��Ի�����
�ؼ��ʣ������滮��·���յ���ƫ�ú�����A*�㷨
��ͼ����ţ�U491.4 ���ױ�־�룺A ���±�ţ�1672-7207(2012)08-3287-07
Route guidance method based on physical programming
LONG Qiong1,2, HU Lie-ge2, ZHANG Lei1, YU Jie1
(1. School of Civil Engineering, Hunan City University, Yiyang 413000, China;
2. School of Traffic and Transportation, Changsha University of Science & Technology,Changsha 410004, China)
Abstract: Aiming at the driver��s individual demand during the route guidance process, a route guidance method based on physical programming was proposed. Firstly, guidance model which reflects the driver��s individual demand well was constructed on the physical programming basic idea, which includes constructing the route evaluation index system, designing the preference function��s mathematical expression and its corresponding preferred factors, providing the foundation model for the route guidance process. Secondly, an optimal route which reflects the driver��s individual demand well was obtained by using A-star algorithm after the cost function was designed and the traffic road network database was constructed. The simulation results show that the proposed route guidance method can satisfy the driver��s individual demand.
Key words: physical programming; route guidance; preference function; A-star algorithm
·���յ�ϵͳ(Route guidance system)�����ܽ�ͨϵͳ�ĺ�����ɲ���֮һ[1-2]��·���յ�ϵͳͨ���յ���Ϣ���ı�����ߵij�����Ϊ�����ͳ����߶�δ֪��ͨ״̬�Ľ��ǣ�Ϊ��ʻԱ�ҵ��ӵ�ǰλ�õ�Ŀ�ĵص�������ʻ·��������ʻԱ��������·���������Ҫ�����˶��죬Ҳ����ʱ�������Ŀ�IJ�ͬ���仯����ˣ�����·���ı�����Ψһ�̶�����ġ��ڵ�ǰ�Ĵ����·���յ�ϵͳ�У����Ż�Ŀ��һ���ʾΪ����ʱ����̻���о������[3-4]����û�����뿼�Ǽ�ʻԱ���Ը��ص㡢��ͨ״��������Ŀ�ĵ����أ����ԣ��䡰���š��ĺ����������ģ�����õ����Ž�Ҳ��һ���ܹ������ʻԱ������[5-6]����ˣ���·���յ������У������ʻԱ�ĸ���ƫ�ã�����·���յ�ϵͳ�ĸ��Ի��ص㣬Э���ø���ѡ���, ���һ����Ч������·���յ���������Ҫ���塣�ܶ��о��߳�������ģ�������˹����ܡ�������������������������⣬��Pang��[7]�����һ�ֻ���ģ���������·��ѡ�����÷�������ģ�����������Ӱ��·��ѡ��ĸ������ص���ع�ϵ�����ո��ݼ�ʻԱ��ƫ�ø������п���·�������������÷����辭���������ѵ������ܱȽ���Ч���ı�ƫ����Ϣ�ĵ�������ϵͳ�ṩ��������Ҫ�������·���������[5]���ڲ�η������ͻ�ɫ�������۽�����һ�ָ��ݼ�ʻԱ��ƫ������Ӧѡ������·���ķ������ܹ��ڿ���·���������������ʻԱ����ƫ�õ�����·��������û�н�����·��ѡ������·���յ����̣����Կ���·�����и��Ի�ѡ���������һ���ľ����ԡ�Ϊ�ˣ���������������ܽ�ͨϵͳ��·���յ�������ص㣬����ʻԱ����ƫ������Ϊƫ�ú���������·���յ������У����һ�ֻ��������滮��·���յ��������÷�����ֿ����˼�ʻԱ�ĸ��Ի������ܹ����㲻ͬ��ʻԱ�ĸ���ƫ�ã�����Ӧ��Ϊ��ʻԱ�ṩ����������·����
1 �����滮��������
1.1 ����˼·
�����滮��Messac��1995�������һ�ִ�����Ŀ���Ż�����������Ч�������÷�����������ƹ�������һ����������Ȼ�Ŀ���У��Լ�����㸺��������ʵ��Ӧ�á��÷����ܹ��ӱ����ϰ���ʹ���ߵ�ƫ�ã��Ǵ�����Ŀ���Ż�������¿�ܡ������˼·�ǣ�����ƫ�ú���������ͬ��������ĸ������Ŀ��ת��Ϊ������ͬ�������������ٵ������Ŀ�ꡣͨ����ƫ�ú������Ż���Ѱ����ۺ�Ŀ����������ŵ���Ƶ���Ϊ��������Ž⡣��ˣ�����ƫ�ú����������滮����Ĺؼ�������ӳ����߶Ը����Ŀ���ƫ�ó̶�[7-10]��
1.2 ƫ�ú�������ѧ����
ƫ�ú��������ָ��ĺ������ǵ�i�����ָ��xi��ƫ�ú���Ϊui(xi)�������滮�ж����ָ���ƫ�÷�Ϊ����4�����ͣ�(1) Class1�����ָ��ԽСԽ�ã�(2) Class2�����ָ��Խ��Խ�ã�(3) Class 3�����ָ������ijֵ��ã�(4) Class4�����ָ����ijȡֵ��Χ��á�ƫ�ú����ַ�Ϊ����Ӳ(S��H) 2�����͡�����ƫ�ú�����ָƫ�ú���ֵ�ڿ������������ָ��仯�����ֶ����ָ�겻ͬȡֵ�IJ�ͬƫ�ó̶ȡ�����Ӳ��ƫ�ú����������ָ���ڿ�������ʱ����ֵ��ȡ��С����ʾֻҪ���ָ����м��ɡ���ˣ�ƫ�ú�������ͼ1��ʾ��8�ֻ������͡��ڹ����Ż������У�һ�������ƫ�ú����������Ŀ�꣬Ӳƫ�ú�������Լ�� ������
Ϊ���Ӿ��塢������������ߵ�ƫ�ã������滮����ƫ�ú��������Ŀ���Ϊ���������IJ�ͬ����̶ȵ����䡣��Class1-S��Ϊ������ijһ���Ŀ��������仮�֣�
(1) ��������(xi��xi1)������߿��Խ��ܵķ�Χ���ҶԸ÷�Χ�ڵ�Ŀ��ֵ��������
(2) ������(xi1��xi��xi2)������������Ŀɽ��ܷ�Χ��
(3) ��������(xi2��xi��xi3)������߿ɽ��ܵķ�Χ��
(4) ��������(xi3��xi��xi4)������߿ɽ��ܵ��������ķ�Χ��
(5) �ܲ�������(xi4��xi��xi5)��Ŀ���ڸ�����ɽ��ܵ��ܲ�������
(6) ���ɽ�����(xi5��xi)��Ŀ���ڸ÷�Χ�ڲ��ɽ��ܡ�
���У�xi1~xi5������߸�����ƫ�ø����ĵ�i�����Ŀ�������˵�ֵ����ͼ2��ʾ��
1.3 �����滮�������ѧģ��
����[11]ȡ�����Ŀ���ƫ�ú���ƽ��ֵ�ij��ö�����Ϊ�ۺ�ƫ�ú�������
 (1)
(1)
���У�nΪƫ�ú����ĸ������ɼ��������滮������Ա���Ϊ���ۺ�ѡ����ʵ�ƫ�ú�������xi(i=1��2������n)��ʹ���ۺ�ƫ�ú���ֵJ��С����J��min����ͨ������£���ƫ�ú�������xi֮�������ϵģ��⽫���滮���̴������Ѷȡ�

ͼ1 ƫ�ú����Ļ�������
Fig.1 Fundamental type of Preference functions

ͼ2 ƫ�ú��������仮��ʾ��ͼ
Fig.2 Interval differentiate schemes of preference functions
2 ·���յ�ģ����
ʽ(1)������1�������滮�����ͨ����ѧģ�͡���ʽ(1)���Կ�������ģ�ͶԸ�����·��ѡ���йص�����(ƫ�ú���)ͬ�ȿ������⽫Ӱ��·���յ�������ԣ�Ҳ���Է�ӳ��ʻԱ�ĸ��Ի��ص㡣��ʵ�ϣ���ͬ��ʻԱ����ÿ��ƫ�ú����Ŀ��س̶Ȳ���һ����ͬ���ڲ�ͬ�������(�粻ͬ����Ŀ�ġ���ͬ��������ͬʱ��)����ʹ��ͬһ��ʻԱ����ÿ��ƫ�ú����Ŀ��س̶�Ҳ����ڲ��졣��ˣ���·���յ������У�Ϊ�����ּ�ʻԱ�ĸ��Ի�ƫ�ã��б�Ҫ���ۺ�ƫ�ú���������ƫ��ϵ����i�����⣬���ǵ����ö����ǵ����������������������ۺ�ƫ�ò���ʵ�����壬���ԣ��������·���յ����Ż�ģ��Ϊ
 (2)
(2)
���У�ui(j)��ʾ����������·�����еĵ�j����·��������ָ��xi��ƫ��ֵ��1/m��Ϊ����·�����۱���һ���Զ�����ļ�Ȩ���ӡ���һ������£��������ָ���ƫ�ú�����ΪClass1-S�ͺ�Class2-S�ͣ���
xi��xi5(Class1-S)
�� xi��xi5(Class2-S)
��ʽ(2)���Կ��������Ǽ�ʻԱ����ƫ�õ�����·��ģ������������ָ��xi��ƫ�ú���fi�Լ�ƫ��ϵ����i������ء���ˣ������ܹ���ӳ��ʻԱ�Ը�ƫ�õ�·���յ�ģ�͵Ĺؼ����ڣ�·������ָ����ϵ�Ĺ������յ�ƫ�ú�������ѧ�����Լ�ƫ��ϵ���������3�����档
2.1 ·������ָ����ϵ�Ĺ���
����1��·�������ӣ�������������ʻ���������ʻʱ���Dz����ģ���Ӧ�ÿ��ǿ���·�����ص㡢��ʻԱ���Ը��ص㡢�ض����е�����(��Ŀ�ġ�Ԥ��)�Լ���ʻ����(����������������)�����أ���ˣ�·�����۾���һ���������ԣ����˶��졣�����ۺϿ��Ǽ�ʻԱ�ĸ��Ի�����������[4]������·������ָ����ϵ���µ�����ָ����ϵ��
P={xi|i=1��2������6} (3)
���У�x1Ϊ��ʻ���룬��ʻ����Խ�̣�ƫ�ú���ֵԽС��������Խ�ߣ�x2Ϊ��ʻ�ٶȣ���ͨ���յ�ϵͳ��������Ԥ�ȸ��ݵ�ǰ��ͨ״������ÿ�ε�·�ϵ�ƽ����ʻ�ٶȣ���ʻ�ٶ�Խ�ߣ�ƫ�ú���ֵԽС��������Խ�ߣ�x3Ϊӵ���̶ȣ���Ҫ���ǵ�·�ϵij����ܶȡ��Ŷӳ��ȡ���Ƶȴ�ʱ��ȣ�ӵ���̶�Խ�ͣ�ƫ�ú���ֵԽС��������Խ�ߣ�x4Ϊͨ�з��ã���Ը��ٹ�·���������շѵ�·��ͨ�з���Խ�٣�ƫ�ú���ֵԽС��������Խ�ߣ�x5Ϊ��ʻ�Ѷȣ���Ҫ���ǵ�·���ȡ������������˼��ǻ����������ȡ���ʻ�Ѷ�ԽС��ƫ�ú���ֵԽС��������Խ�ߣ�x6Ϊ��;���ۣ����г�;����ʱ����;������ʱҲ��1����Ҫ���ǵ����ء���;����Խ�ã�ƫ�ú���ֵԽС��������Խ�ߡ�
2.2 ƫ�ú�������ѧ����
ƫ�ú���ȡֵû���ϸ�����ֻ���ܷ�ӳ���ڲ�ͬƫ������������߶�Ŀ��ֵ������ȼ���[5]���������ƫ�ú�������Ϊ��Ȼ��������(��Class1-SΪ��)������ʽ���£�
 (4)
(4)
���У�eΪ��Ȼ�����ĵ�����
2.3 ƫ��ϵ�����
����ͬһ·������ָ�꣬ÿ����ʻԱ����ע�س̶Ȳ�һ��һ�¡����磬�����ڸ�ʱ��ʱ����ʻԱͨ��ע�ص�����ʻ�������ʻ�ٶȣ�����ʻ�����Ƚ�����ʱ����ʻԱͨ����Ҫ���ǵ�·����ʻ�Ѷȣ��������ʱ����ʻԱͨ����ѡ����нϺ���;���۵�·����ˣ�Ϊ�����ּ�ʻԱ�ĸ��Ի������б�Ҫ��ƶԲ�ͬ·������ָ���ƫ��ϵ����
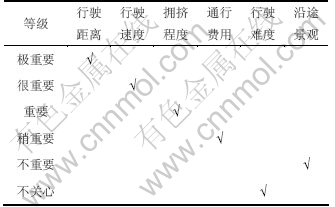
����ƫ�ó̶����½���˳���Ľ�ƫ��ϵ����Ϊ6���ȼ���������Ҫ����������Ҫ��������Ҫ����������Ҫ����������Ҫ�����������ġ������1��ʾ��
�������С������ġ���ƫ��ָ���Ӧ��ƫ��ϵ����0������ƫ��ϵ���������۸�Ȩ��������Ӧ��ֵ����
 (5)
(5)
��1 ·��ѡ�����ص�ƫ�ó̶Ƚ���
Table 1 Interface of preference of path selection factors
3 ·���յ�����
3.1 ����˼·
����A*�㷨[11]����·�������������˼·���£��ڹ�����ͨ·�����ݿ�Ļ����ϣ�����ǰ�湹����·���յ�ģ�ͣ���ƺ��ʵĴ��ۺ������Ӽ�ʻ������������A*�㷨�ڽ�ͨ·����������չ��Ӧ��·���ڵ㣬ֱ����չ��Ŀ��ڵ�������Ӷ���Ŀ��ڵ��������㣬���յõ�һ���ܹ���ӳ��ʻԱ����ƫ�õ����� ·����
3.2 ·�����ݿ��
�������û�ƫ��ʱ��·�����ݿ�Ĺ�������Ҫ������ͨ·����ÿ����·�ij��ȣ�����Ҫ����ÿ�����е�·�ϵ���ʻ�ٶȡ�ӵ���̶ȡ�ͨ�з��á��г��Ѷȡ���;���۵����أ����ԣ�������ÿ����·���������ݽṹ���£�
Road={long, velo, crowd, fee, difficulty, landscape} (6)
ʽ�У�longΪ��·���ȣ�velo, crowd, fee, difficulty��landscape����Ϊ�Ը�����·�ϵ���ʻ�ٶȡ�ӵ���̶ȡ�ͨ�з��á��г��Ѷȡ���;���۵����ۡ���˵�����ǣ����ڼ�ʻԱ���ԣ�����ĵ�����ʻ��·�̣����ԣ����ڵ�����·�ij���������û������ġ���ˣ������ݿ���Σ�ֻ�豣�����ȣ���������������ֵ�ϵ����ۡ�Ϊ�˱������۱��IJ�ͬ������·�����۵������ԣ��ڴ˲���ͳ�Ʒ�����Щ�����������У��Ӷ��õ�һ���Ͽ۵�������ֵ��
�Զ�ij����·�ϵ���ʻ�ٶ�����Ϊ�������ȣ����ݾ���ȷ���ٶ����۵����仮�ֲ�������С��������Ϊv1��v2��v3��v4��v5��Ȼ��ͨ���յ�ϵͳ��������ʵʱ���������·�ϵ�ƽ��ʱ�٣������ʽ(4)��ȷ��������·����ʻ�ٶȵ���ֵ����(ƫ�ú���ֵ)��
 (6)
(6)
������������ֵ���۷�������ʻ�ٶ��������ơ�����ֵ���۽���ɽ�ͨ���յ�ϵͳ��������ͳһ�������Ӷ������˽�ͨ·�����ݿ⣬Ϊ��̵�·���յ������ṩ����֧�֡�
3.3 ���ۺ���
��·���յ�ģ��(ʽ(2))���Կ��������Ǽ�ʻԱ����ƫ�õ�·���յ���һ����Ŀ���Ż����⡣Ϊ���������Ч�ʣ���֤����������·���ܹ������ʻԱ�ĸ���ƫ�ã�ͬʱ���ǵ���ʻԱ���ĵ�����ʻ��·�̣��Ե�����·���Ƚ���������û������ģ�����������ָ�������Ե�����·�������۵ģ�Ϊ�ˣ����Ľ����ۺ�����Ϊ2���֣��������ʻ��·�����۵Ĵ��ۺ����������������ָ����ۺϴ��ۺ������ֱ����A*�㷨��˼�����·������[12]�����ۺ������£�
f(k)=f1(k)+f2(k) (7)
���У�f1(k)Ϊ�����ʻ��·��x1�����۴��ۺ�����
f1(k)=��1u1(g1(k)+h1(k)) (8)
ʽ�У�g1(k)Ϊ��ʻԱ����ʼλ�õ���ǰ·���ڵ��ʵ��·�����ۣ�h1(k)Ϊ�ӵ�ǰ·���ڵ㵽���յ�λ�õ�����·�����ۣ���ȡh1(k)Ϊ��ǰ·���ڵ����յ��ֱ�߾��룻u1(��)Ϊ·���������ۺ�����f2(k)Ϊ�����������ָ��x2~5���ۺϴ��ۺ�����
 (9)
(9)
gi(k)Ϊ��ʻԱ����ʼλ�õ���ǰ·���ڵ��������۲���xi��ʵ�����۴��ۣ�hi(k)Ϊ�ӵ�ǰ·���ڵ㵽���յ�λ�õ��������۴��ۡ�������ͨ������£�hi(k)����Ԥ����Ϊ���о����㣬���Ľ���·�����۽���������������ȡ��
 (10)
(10)
3.4 �㷨����
���������滮��·���յ��㷨���岽�����¡�
Step 1����ʼ����ȷ����ʻ����Ŀ�ĵ㣬������Ӧ�Ľ�ͨ·�������ݵ�ǰ�Ľ�ͨ״�������ܽ�ͨϵͳ�Զ���ÿ����·������ֵ���ۣ�ȷ����ƫ�ú���ֵ(ע������ͨ�з��á��г��Ѷȡ���;���۵ȣ������ڽ�ͨ·�����ݿ���ij��ڽ������ۣ�������ӵ����ʻ�ٶȡ�ӵ���̶ȵȣ�����Ҫʵʱ���и���)��
Step 2�����Ի�ѡ��ʻԱ�������ն�ϵͳ���������ƫ�ã����1��ʾ��
Step 3������·����������������Ŀ�ĵ����꣬����A*�㷨�ڽ�ͨ·���������������ߵ�����·����
1) ����1��ֻ������ʼ�ڵ������ͼG������ʼ�ڵ����OPEN���У���CLOSED���ÿա�
2) ��OPEN��Ϊ�գ���ʧ���˳���
3) ѡ��OPEN���еĵ�1���ڵ㣬������OPEN��������CLOSED���С�
4) ����ǰ�ڵ�ΪĿ��ڵ㣬��Ŀ��ڵ�ĸ��ڵ�ָ��ָ��ǰ�ڵ㣬·���������̽�������Ŀ��㿪ʼ���ϻ���ֱ����ʼλ�ã��õ�����ʼ��Ŀ�����С����·����
5) ���ڽ�ͨ·��ͼ����չ��ǰ·���ڵ㡣�������̽ڵ㼯M��ע�ǰ�ڵ�����Ȳ���M�У���G�а���M�ij�Ա��ʹ֮��Ϊ��ǰ�ڵ�ĺ�̡�
6) ��M��ÿһ������G�еij�Ա����һ��ָ��ǰ�ڵ��ָ�롣��M����Щ��Ա�ӵ�OPEN�У���M��ÿһ������OPEN�л�CLOSED�еij�Աm������Ŀǰλ���ҵ��ĵ���m�����·��ͨ����ǰ�ڵ㣬�Ͱ�����ָ��ָ��ǰ�ڵ㡣��������CLOSED�е�M��ÿһ����Ա�����¶�������G�е�ÿһ����̣���ʹ����˳�ŵ�ĿǰΪֹ���ֵ����·��ָ�����ǵ����ȡ�
7) ����f������OPEN����
8) ���ز���3��
Step 4���������·����
4 ��������
Ϊ����֤���ķ�������Ч�ԣ�����ͼ3��ʾ�ĸ����ij��н�ͨ·��ͼ�н���·���յ����档ͼ3�У�OΪ�������ģ�E1��F1��G1��H1��E1����������Ϊ�����ڡ�����������Ϊ�����⡱��A1��B1��C1��D1��A1Ϊ�ƳǸ��٣�A3��B3��C3��D3��A3��A3��C3��B3��D3Ϊ����������A1��C1��B1��D1Ϊ����ά���еĽֵ�������Ϊһ��ij��нֵ�����ͨ·����ÿһ��Ԫ����ı߳���Ϊ1(��A1��D4)������ԽDZ߳�Ϊ (��A1��E1)��
(��A1��E1)��

ͼ3 ��ͨ·��ʾ��ͼ
Fig.3 Traffic network
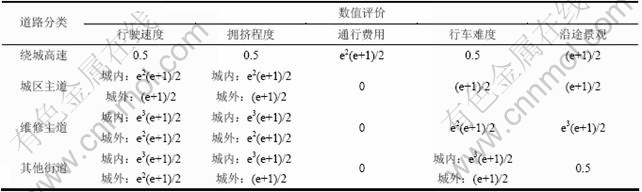
������·�̵����ۣ�ȡ��·����ʼĩ����ֱ�߾���ı�ֵ����Ϊ���۲��������仮��Ϊ�� ��
�� ��
�� ��
�� ��
�� ��
�� ����Ӧ��ƽ��ֵ����Ϊ��0.5��(e+1)/2��e(e+1)/2��e2(e+1)/2��e3(e+1)/2�͡ޡ�������ز����������2��ʾ��
����Ӧ��ƽ��ֵ����Ϊ��0.5��(e+1)/2��e(e+1)/2��e2(e+1)/2��e3(e+1)/2�͡ޡ�������ز����������2��ʾ��
�����ʻԱ��A1������Ҫ�ִ��յ�C1�����ڲ�ͬ��������µ�����·����
(1) ���1����ʻԱ�н������飬ϣ���Ժ̵ܶ�ʱ��ִ��յ�C1������ʻԱ����ʵϰ�ڼ䣬��ʻ������̫������ϣ����·�ϳ�������С��·���Ϻá��ü�ʻԱ����ʻ�������ʻ�ٶ�����Ϊ������Ҫ����ӵ���̶Ⱥ��г��Ѷ���Ϊ����Ҫ��������ָ������Ϊ�������ġ���
���յ�3�ڵķ����Ͳ������·���滮���õ����Ž��Ϊ(ͼ4��ʾ)��
A1��D4��D3��H1��C3��C2��C1
����
A1��A2��A3��F1��B3��B4��C1

ͼ4 �Ż�·��ʾ��ͼ1
Fig.4 Optimization path of traffic network
������������Կ��������������滮�����������ʻ��ʻ���벻̫����ʻ�ٶ�����ϸߣ�����ܹ��Ժ̵ܶ�ʱ��ִ��յ㣻ͬʱ����ѡ��ĵ�·ӵ���̶Ƚϵͣ��г��ѶȽ�С�����ϼ�ʻԱ������������
(2) ���2����ʻԱ������棬ϣ���ڲ������ϴ���õ�����ºú�������;�ķ羰������ע����ʻ�������ʻ�ٶȣ�ͬʱ���ü�ʻԱ�����������Խ�ͨ״����·����խ��������ں����ü�ʻԱ����ʻ�������ʻ�ٶ�����Ϊ������Ҫ����ӵ���̶Ⱥ���ʻ�Ѷ�����Ϊ������Ҫ����ͨ�з�������Ϊ����Ҫ������;��������Ϊ������Ҫ����
ͨ���滮���õ����Ž��Ϊ��
A1��D4��H2��G2��C2��C1
����
A1��A2��E2��F2��B4��C1
��������������˵�ͨ�з��úͺ���;���۵��ص㣬�Ϻ÷�ӳ�˼�ʻԱ�ĸ��Ի�ƫ�á�
����2��������������������ƫ�ú��������룬���������滮��·���յ��������ϼ�ʻԱ����·��ѡ��ľ�����Ϊ�������ܹ����㲻ͬ��ʻԱ�ij�������
��2 ��ͨ·����ز�������
Table 2 Traffic network related parameters settings
5 ����
(1) ���������滮���ۣ�����ƫ�ú����������һ���ܹ���ӳ��ʻԱƫ�õ�·���յ���������������������·���յ�������ϼ�ʻԱ�ĸ��Ի�ѡ��
(2) �÷����ܹ���ЧЭ���ø���·��ѡ�����������·���յ�ϵͳ�ĸ��Ի��ص㣬�ܹ����㲻ͬ��ʻԱ�ĸ���ƫ�ã�����Ӧ��Ϊ��ʻԱ�ṩ����������·����
(3) �÷����˷��������滮����Ŀ�굥һ��ȱ�㣬Ϊ���ܽ�ͨϵͳ���о��ṩ��һ���Ľ�����壻��˵�����ǣ��÷�����·����ͨ��Ϣ�����������ڴ˻����Ͻ�������·�����������÷���ʵ������һ�־�̬��·���յ�����������ʵ�ϣ�·����ͨ��Ϣ��ʵʱ�仯�ģ���ˣ��б�Ҫ���ڶ�̬��·�������Ը��Ի�·���յ����Խ����о���
�ο����ף�
[1] ������. ���н�ͨ���յ�ϵͳ������ģ��[M]. ����: ����ͨ������, 2000: 14-29.
YANG Zhao-shen. The urban traffic flow guidance system theory and model[M]. Beijing: China Communications Press, 2000: 14-29.
[2] ������, ����, Ǯ����. ���ܽ�ͨϵͳ��·���յ��㷨�о���չ[J]. �㽭��ѧѧ��: ��ѧ��, 2005, 39(6): 819-825.
LI Wei-wu, WANG Hui, QIAN Ji-xin. New trends in route guidance algorithm research of intelligent transportation system[J]. Journal of Zhejiang University: Engineering Science, 2005, 39(6): 819-825.
[3] WANG Hui. Transportation shortest path search area model[R]. ProQuest Information and Learning Company, 2003: 119-121.
[4] Younes H, Patrice M S N. A strategic model for dynamic traffic assignment[J]. Networks and Spatial Economics, 2004, 4(2): 291-315.
[5] ����, ��ɭ��, ���d. ���ڻ�ɫ�������۵�����Ӧ����·��ѡ��[J]. �й���·ѧ��, 2003, 16(4): 87-90.
SUN Yan, CHEN Sen-fa, HUANG Kun. Adaptive optimal route selection based on gray evaluation theory[J]. China Journal of Highway and Transport, 2003, 16(4): 87-90.
[6] Jeffer L A, Goutam S P, Vikram M, et al. A multi-agent approach to cooperative traffic management and route guidance[J]. TransPortion Reasearch Part B, 2005, 39(4): 297-318.
[7] Pang K H, Cran T. Adaptive route selection for dynamic route guidance system based on fuzzy neural approaches[J]. IEEE Transactions on Vehicular Technology, 1999, 48(6): 2028-2041.
[8] McAllister C D, Simpson T W, Kemper L, et al. Robust multiobjective optimization through collaborative optimization and linear physical programming[C]//10th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference. Albany, New York, 2004: 1-16.
[9] Achille M, CHEN Xuan. Visualizing the optimization process in real-time using physical programming[J]. Eengineering Optimization, 2000, 32(6): 721-747.
[10] Ӻ����, ����, �ƹ���. ���������滮�ĸ߳����ٷ���������ʽ����켣�Ż�[J]. ����ѧ����2008, 29(5): 1091-1097.
YONG En-mi, CHEN Lei, TANG Guo-jin. Trajectory optimization of hypersonic gliding reentry vehicle based on the physical programming[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(5): 1091-1097.
[11] ���ƾ�, ������, Ф����. �����ʻԱ���Ե�·���滮�㷨[J]. ���������, 2011, 37(5): 264-265.
LONG Ke-jun, WANG Sai-zheng, XIAO Xiang-liang. Driver character-oriented algorithm for route planning[J]. Computer Engineering, 2011, 37(5): 264-265.
(�༭ �²ӻ�)
�ո����ڣ�2011-10-05�������ڣ�2011-12-02
������Ŀ������ʡ��Ȼ��ѧ����������Ŀ(07jj6093)������ʡ������������Ŀ(09c213)
ͨ�����ߣ�����(1967-)��Ů�����ϳ�ɳ�ˣ�˶ʿ��������ʦ����ɳ������ѧ����ѧ�ߣ����½�ͨ��������ơ�������Ŀ�����о����绰��0737-4628998��E-mail��longqiong@126.com

