����PLC�Ĺཬѹ���Զ�����ϵͳ����������о�
����1��������1������1��Ҧ��ϼ1���ƻ�1, 2
(1. ���ϴ�ѧ �����ѧ����Ϣ����ѧԺ����ɫ�����ɿ�Ԥ��������ص�ʵ���ң����� ��ɳ��410083��
2. ���ϻ���ŭ��ˮ�翪������˾������ ������650228)
ժҪ����Թཬѹ�����ܱ���ز㸴�ӵ����������ཬ�豸�ṹ��ʽ���˹������ͺ��Ե�����Ӱ���������Χ���������⣬Ϊ��ʵ�ֹཬѹ���Ķ�̬�����Զ����ƣ��Կɱ����������(PLC)��ѹ��ʽѹ�����������ŷ�����������������ٻ��͵綯���ڷ�����Ϊ���IJ��������ڲ���������ģ��PID�����㷨��д���Ƴ�����ƹཬѹ���Զ�����ϵͳ����ϵͳͨ����ѹ���������ķ���ѹ�����бջ����������������ŷ������������ת���������ſ���ʹѹ�������ȶ����о�������������ཬѹ����0~5 MPa�ڱ仯ʱ���ཬѹ���Զ�����ϵͳ����5~6 s����Ӧʱ����ʵ��ѹ���Զ����ƣ��������ƾ��ȱ�����ѹ���趨ֵ��5%���ڣ��ȶ������ã�������������������˹�����ģʽ�������ֳ��ཬʩ������Ҫ��
�ؼ��ʣ��ཬ��ѹ���������ɱ������������ģ��PID����
��ͼ����ţ�TV736 ���ױ�־�룺A ���±�ţ�1672-7207(2013)10-4055-08
Design and experimentation of grouting pressure automatic control system on PLC
WANG Chao1, XU Lisheng1, XU Meng1, YAO Cuixia1, HUANG Hui1, 2
(1. Key Laboratory of Metallogenic Prediction of Nonferrous Metals, Ministry of Education,
School of Geoscience and Info-Physics, Central South University, Changsha 410083, China;
2. Yunnan Huadian Nujiang River Hydropower Development Co. Ltd., Kunming 650228, China)
Abstract: Aimed at large-scale fluctuations of grouting pressure caused by complex geological conditions of grouting strata, grouting equipment structure, manual control hysteresis and other factors, in order to achieve dynamic detection and automatic control on grouting pressure, the grouting pressure automatic control (GPAC) system was designed based on the control program written by parameter self-tuning fuzzy-PID control algorithm, with core components of programmable logic controller (PLC), piezoresistive pressure transducer, servo motor, driver, reducer and electric control valve. Measured feedback values of piezoresistive pressure transducer can be closed-loop cycle corrected, and the valve opening can be adjusted by servo motor reversing to keep the grouting pressure stable under GPAC system control. The simulation results show that grouting pressure can be automatic controlled in 5-6 s and control precision can be kept on less than 5% of designed pressure value by grouting pressure automatic control system when the grouting pressure changes in the range of 0-5 MPa. Control performances of GPAC system are better than manual control mode, so the need of grouting construction can be well fulfilled.
Key words: grouting; pressure fluctuation; programmable logic controller; fuzzy PID control
�����ཬ��ˮ��������ػ������ͼӹ̴�������Ҫ����֮һ�����ཬʩ���ǵ������ι��̣���ʩ��������Ӧ�Ը���Ҫ������������ʵʱ��غͼ�¼����ȷ�����̵İ�ȫ������[1-2]�����Ź��̼����Ľ����ͷ�չ����Һ�ܶȺ������Ȳ����Ķ�̬��⼼���õ���һ�����ƣ����ཬѹ���ļ��Ϳ���һֱ��δ����Ĺ�������[3]���ཬѹ���ǽ�Һ�ڵز�����ɢ�Ķ�������ֱ��Ӱ��ཬ�������ͼӹ�Ч�������ཬѹ�����ߣ��������к���ˮ�����Ѻ�����ЧӦ���Ӷ������ز�̧�������������幤����������ƻ��Ĺཬ�¹ʣ����ཬѹ��ƫ�ͣ���Һ������Ч����������ϸС��϶�Ϳն���Ӱ��ཬ��������ɰ�ȫ����[4-7]��Ŀǰ���ڹ��ڹ����жԹཬѹ������ÿ������Ʋ��ԣ������ཬѹ�����������������ཬ����������ʱ��ָ��ר�˵��ڰ�װ�ڷ����ܵ��ϵ��ڷ��ķ�о���Ƚ��п��ơ����ڱ���ز���������ĸ����Ժཬ�豸�Ľṹ��ʽ��������ɹཬѹ���仯��ȷ�����˹����ƴ����ͺ��ԺͿ��ƾ��Ȳ��ȱ�ݣ�������ɹཬѹ���ļ������ߺʹ�Χ����[8]��Ϊ��ʵ�ֹཬѹ���Ķ�̬�����Զ����ƣ����߽�ϴ��������������������Զ����Ƽ��������ڿɱ����������(PLC)���з��˹ཬѹ���Զ�����ϵͳ(���GPACϵͳ)����ͨ������ģ��ཬ������֤�豸�ɿ��ԺͿ��ƾ��ȣ���������ʵ�ʹ��̵ļ��Ϳ�����Ҫ��
1 �ཬѹ������������ϵͳ���
1.1 �ཬѹ����������
�ཬѹ��ͨ�����ܹཬ�û����˶�����ʹ����������ͨ������ǰ���Ľ�Һ����������[9]����ϵͳ����У���Ҫ��������3�����ضԹཬѹ����Ӱ�졣
(1) �ཬ�ز���������ԡ��ཬ������ʩ���˸�ѹ�Ĺ�Һ�������壬��ˣ�����ز����϶���ȡ��������췶Χ����ͨ�������϶�еij����P��϶��Ĵֲڳ̶ȵȼ�����������ʹ���ڵ������˶�״���������ӱ仯��������ɹཬѹ������[10]������������������ϵ����K�ۺ������ཬ�ز���������ԡ��ڱ���һ��������£�������ϵ����K����ʱ��ѹ�������ڹཬѹ���½�������K����ʱ��ѹ����С�����ڹཬѹ���������ӽ�����ѹ����
(2) �綯���ڷ�������״���������ڷ��ķ�о���Ȳ�ͬʱ����ǰ����ѹ����һ���������������ٹ�������ϵ����T����������ѹ���������ڵ��ڷ���������ʱ��ѹ����ʾ��T��ѹ��С����ʾ��TС�����ཬѹ������ڷ���T�ĸı�ᷢ�����и������Թ�ϵ�IJ����仯����ԭ���ǣ�����T����ʱ���ཬѹ����������������T��Сʱ���ཬѹ���½�����T�ɸ�����ʽ����õ���
 (1)
(1)
ʽ�У�pT1Ϊ���ڷ�ǰѹ����MPa��pT2Ϊ���ڷ���ѹ����MPa����TΪ���ڷ��Ĺ�������ϵ����QΪͨ�����ڷ���������L/min��ATΪ���ڷ����ڵķ��ڽ������m2��
(3) �ཬ�õ��������ԡ�����K���T�����仯ʱ���ཬ�õ����й����㽫�����仯���õ�ѹ��-�������Խ�����ѹ��������ʹ��������ͻȻ������С���γɹܵ���ˮ����������ɹܵ���Һ��ѹǿ�����������ѹ�������ٷ�������ཬѹ�������仯[11]��
�ز����������������ȷ���ģ����ڷ��Ŀ��ȿ�����Ϊ��綯���ڣ����ཬ���������Կ��Է�ӳ��3�����ضԹཬѹ��Ӱ�����س̶ȡ�
1.2 �ཬѹ���Զ�����ϵͳ
1.2.1 ϵͳӲ�����
�ཬѹ���Զ�����ϵͳ(GPACϵͳ)�ǻ��ڹཬѹ����������������ƣ����ɱ����������(PLC)��ѹ�����������ŷ�������������͵綯���ڷ��Ƚ�����Ч��ϣ�ʹ����Ԫ����ִ�л�������Ԥ��������У��Ӷ�ʵ�ֹཬѹ�����Զ����ơ��ڹཬʩ���У�GPACϵͳ������ཬ�Զ���¼�豸��LJ-IV�ཬ���ϵͳ��[12]�л���ϣ�����Эͬʵ�ֹཬ�����ļ���ѹ���Զ����ơ�ϵͳ��Ҫ������4������ģ����ɡ�
(1) ���ģ�飬Ϊѹ��ʽѹ�������������õ�����ѹ��ЧӦ�Թཬѹ�����ж�̬���[13]��ѹ��������������ΧΪ0~10 MPa����⾫��Ϊ0.2%��
(2) ����ģ�飬ΪS7-400ϵ��PLC������ģ�黯��ƣ�ģ����չ�����ù���ʹ���ܹ�����ÿ����ͬ������������[14]��
(3) ִ��ģ�飬�����ŷ�������������ͼ��ٻ��ȡ�����Ϊ��PLC���͵ĵ��ź�ת���ɵ綯�����ϵĽ�λ�ƻ���ٶ�������Ӷ�����ѹ�����Ʒ��ŵĿ���ʵ��ѹ�����ơ�������ѡ��ASDA-A2�߽����������ŷ��������������þ��и������������������źŴ������������ƾ�Եդ˫���;���ܲ�����ȷ�ĵ���������������ŷ�����Ӷ�ʵ�־���λ���ŷ��������ECMA-C10807ES�������Ž����ŷ����������Ϊ0.75 kW���ת��Ϊ2.39 N��m�����ٻ������ϸ˼��ٻ����ٱ�Ϊ5�����ľ�Ϊ35 mm��������Ϊ1��104 N�����빦��Ϊ0.3 kW�����ݷ�о�ߴ���㣬���ٻ�����ѹ����ΧΪ0~38.5 MPa������ཬѹ�����Ƶ�Ҫ��
(4) ѹ������ģ�飬Ϊ���Ʒ����ܳɣ������綯���ڷ����ֶ����ڷ����书���Ǹ���ִ��ģ��ָ����ڵ綯���Ŀ��ȣ��Ӷ�����ѹ���������ֶ������ڽ���״���µ��˹����ơ�
1.2.2 ѹ���Զ�����ԭ��
GPACϵͳ��ͨ��PLC��ѹ���������ķ���ѹ�����бջ����������������ŷ������������ת���������ſ��Ƚ�������ѹ��������ѹ����������װ�ڹཬ������·��ѹ�����Ʒ����ڶˣ���ӳ�ཬ�Ŀ�ѹ�������������ཬѹ��ת����4~20 mA�ĵ������������ݲɼ����ƿ�������A/Vת�����ƿ���ģ���ź�ת���������ź���PLC��������PLC�Ա�ʵ��ѹ����ཬѹ���趨ֵ�����ݷ������������Ӧ�������ģ���źŸ��ŷ���������������������ݽ��յ��ź������ŷ������ת��ת���Ӷ������綯���ڷ����������ƶ��Ըı䷧�ŵĿ��ȡ���ʵʱ���ֵ(����ʵ�ʹཬѹ��)�����趨ֵʱ�������ſ��Ƚ���ж�ɣ���֮�����ſ��ȼ�С������ж����������ѹ�����ã��������������ϴ��ܲ���ѹ��ʱ�����Ž���ȫ�رգ����н�Һ��������ڣ�������ѹ�������趨ѹ������������ʱ�����Ž�Ѹ����ȫ��ʹ�ཬѹ��ж�ɣ���ֹ̧���¹ʷ������˹���ѭ��ִ�У�����ʵ��ѹ�����Զ����ơ�
1.2.3 �����㷨���������
(1) �����㷨��ϵͳ���Ƴ���ı�д�����˲���������ģ��PID�����㷨�������ó���PID����������̬��Ϻ���̬������ģ�����ƽ�ǿ������Ӧ����������̬���[15-16]���������˼���ǣ���ѹ��ƫ��ϴ�ʱ������ģ�����ƣ��ӿ���Ӧ�ٶȣ���ѹ��ƫ���Сʱ��������̬���̺��л���PID���ƣ����������߿��ƾ��ȡ�
������PID�������Ŀ��ƹ���[17-18]�еĻ��ֺ����������ɢ���������õ�������GPACϵͳ�������Ƶ���ɢPID���Ʊ���ʽ��
 (2)
(2)
ʽ�У�u(k)Ϊ��k�β���ʱ�̵ļ�������ֵ��e(k)Ϊ��k�β���ʱ�������ƫ��ֵ��e(k-1)Ϊ��(k-1)�β���ʱ�������ƫ��ֵ��KpΪ����ϵ����KiΪ����ϵ����KdΪ��ϵ���� ��
�� ��TiΪ����ʱ�䳣����TdΪ��ʱ�䳣����TΪ�������ڣ�kΪ������š�
��TiΪ����ʱ�䳣����TdΪ��ʱ�䳣����TΪ�������ڣ�kΪ������š�
���ڲ������ƣ� ���Ҹ��ݵ���ԭ���ɵã�
���Ҹ��ݵ���ԭ���ɵã�


 (3)
(3)
ʽ�У���e(k)=e(k)-e(k-1)���������� ֻ���������ƫ��ֵe(k)��e(k-1)��e(k-2)�йأ���ʽ�����д����ۼӣ��������Կ�����Ӱ��С������Ч���Ϻá��������㷨�е�Kp��Ki��Kd�����뱻�ض���ṹ��������ƥ�䡣�����ڱ���ز���������ĸ����ԣ��ཬ��·�ľ�ȷ��ѧģ�����õ�����ˣ��������������Ӧ�ٶȺͽ��ͳ�����֮���ì�ܣ���ʱ����Ҫ���ģ��������������̬��ϡ�
ֻ���������ƫ��ֵe(k)��e(k-1)��e(k-2)�йأ���ʽ�����д����ۼӣ��������Կ�����Ӱ��С������Ч���Ϻá��������㷨�е�Kp��Ki��Kd�����뱻�ض���ṹ��������ƥ�䡣�����ڱ���ز���������ĸ����ԣ��ཬ��·�ľ�ȷ��ѧģ�����õ�����ˣ��������������Ӧ�ٶȺͽ��ͳ�����֮���ì�ܣ���ʱ����Ҫ���ģ��������������̬��ϡ�
����������ģ��PID�����㷨�����e�������仯��ecΪ���룬PID�����������ĵ�������Kp����Ki�͡�KdΪ���ֵ���������У�ͨ�����ϼ��e��ec������ģ������ԭ����3��PID�������������ģ������㲻ͬe��ecʱ�Կ��Ʋ����IJ�ͬҪ��ʹ���ض��������õĶ�̬�;�̬���ܡ��㷨ȡe��ec��ģ���о����ֵ��Kp����Ki�͡�Kd��ģ������Ϊ{NB��NM��NS��ZO��PS��PM��PB} = {�����У���С���㣬��С�����У�����}��7������ֵ[19]��e��ec����Kp����Ki�͡�Kd����ͬһ�������������ò���ʽ��������������һ����ʽΪ




���У�AnΪƫ�BnΪƫ��仯�ʣ�PC(��Kpn&��Kin&��Kdn)�������б�������Kpn����������Kin��������Kdn��PID������������ƫ��An��ƫ��仯��Bn�¶�Ӧ�����ֵ�ֱ�Ϊ��Kpn����Kin�͡�Kdn��
(2) ��������ģ�黯��ƣ��˻������������ã�ָʾ��ǿ�������������ӳ����жϳ��ɡ��������ȵ�����������ɳ�ʼ��(��������������ʼ����ʱ�����õ�)��Ȼ�����������ȴ�ѭ����ֱ�������ж�ָ�������ӳ���Ϊֹ������������ͼ1��ʾ�������������¹��ܡ�
1) �ཬ���ܡ����LJ-IV�ཬ���ϵͳ��ɹཬ�������趨�����ཬ�����йز���(�š����ڵ�)���ཬѹ����������Χ(��������)�����ת����ϵͳ������

ͼ1 �ཬѹ���Զ�����ϵͳ��������ͼ
Fig. 1 Flow chart of grouting pressure automatic control system program
2) ͨѶ���ܡ�ʵ����LJ-IV�ཬ���ϵͳ������ת��������ͨѶ(RS-232C)���ܡ�
3) ���ݴ������ܡ������ཬѹ��ʵ��ֵ���趨ֵ֮���ֵ�ġ������������������ݲ���������ģ��PID�����㷨�����㲢���ѹ����������
4) ָ��ִ�й��ܡ�����ѹ������ָ������ŷ����������ת�Ե��ڵ綯���ķ�о���ȡ�
2 ��������
2.1 �����豸
ģ��ཬ���鰴��DL/T 5148��2012(��ˮ��������ˮ��ཬʩ�������淶��)[20]Ҫ����һ��ཬ������ʵʩ�������豸������SGB6-10������ʽ�ཬ�ã�LJ�����ܶȼƣ�K300�͵�������ƣ�KELLERѹ��ʽѹ������������դ�ز�̧����������LJ-IV�ཬ���ϵͳ�������Ŷ���V01���쿪��V02���綯��V03���ֶ���V04��ɵķ����飬GPACϵͳ�����������·������豸�����ͼ2��ʾ�������У�GPACϵͳ��LJ-IV�ཬ���ϵͳ����ʵʱ���ӣ��������ڸ����������ָ��ķ�������¼�ʹ�ӡ��������ʵʱ������ݡ�
2.2 �������ݺͲ���
(1) �ཬ�������������顣ȷ���ཬ�õ��ȶ������㣬ͨ������ཬ������������ѹ�������������ཬ���������Զ�ѹ���Զ����Ƶ�Ӱ�졣Ϊ�˷�ֹ��Һ�����ܹܵ�����Ӱ��������������˲��ֲ�������ˮ��Ϊ�ཬ���ϡ�

ͼ2 ģ��ཬ�����豸��ɺ�·���
Fig. 2 Equipment composition and pipeline design of simulated grouting experiment
(2) �綯���ڷ������������顣����ˮ�ұ�Ϊ1:1��ˮ�ཬҺ���趨��ͬѹ���½��йཬ���飬ͨ��GPACϵͳ���Ʒ��ſ��ȣ���Ⲣ��¼��ͬ�����µ綯��ǰ��ѹ����Һ������������ʽ(1)����������ϵ���������綯���������Զ�ѹ��������Ӱ�졣
(3) �ཬѹ���Զ��������顣�����Ҫ��ı�綯��V01�ķ�о�����������Ŷ����Ӷ�ģ��ʵ�ʹཬ�ز������ϵ����K������ˮ�ұ�1:1��ˮ�ཬҺ�ཬ����ѹ���������ʱ��GPACϵͳ���Ƶ綯��V03�Ŀ������Զ����ƹཬѹ�����쿪��V02���ֶ���V04����ģ��ཬ�ܵ����ŵ��л����ơ����ڱõ��������ԣ��ڽ���������֮ǰ����1�������ң������ȶ�����ʱ�Ľ�Һ������������С����ѹ���仯�����ļ����
2.3 ����������
2.3.1 �ཬ����������
��1��ʾΪ�ཬ�������������������ཬ��p-Q����������ͼ3��ʾ���ӱ�1��ͼ3��֪���ཬ�õ���������ʹ�Ž�������ѹ�����������С��������Ϊ�ڹཬ�����У������ų�ѹ������ߣ��Ӵ��˽���©�𣻵��ཬѹ��Ϊ1~5 MPaʱ���ཬ�õ��������������������1.5%���ڣ������SGB6-10�ཬ��ѡ�ͺ��ʣ������ȶ����������������ԶԹཬѹ���Զ����Ƶ�Ӱ���С��
��1 �ཬ�������������������ݱ�
Table 1 Pulsation performance test result of grouting pump


ͼ3 �ཬ��ѹ��p-����Q��������ͼ
Fig. 3 Pressure-flow performance of grouting pump
2.3.2 �綯���ڷ���������
��2��ʾΪ0.5��1.5��2.5 MPaѹ���£��綯��V01��V03������ϵ���淧�ſ��ȵı仯�����������2��֪���ڲ�ͬѹ���£����ڸ����Ŀ��ȣ���V01��V03������ϵ���仯��С������V01��V03�ڷ�о���Ƚ�Сʱ������������С���ŵ�����ϵ�����ڿ��ȴ���40%ʱ�����ŵ�����ϵ���½����ȼ�С������ȶ��������ȴ���80%ʱ������ϵ����С�����ſ��ȵļ�����������ϵ���������ֲ��䣬ֱ���ӽ���0����ˣ�ʹ���ſ�����40%~80%֮��仯�Թཬѹ�����ȶ���������Ч��
��2 �綯��V01��V03������ϵ��
Table 2 Damping coefficients of electric control valves V01 and V03

ͼ4(a)��ͼ4(b)��ʾΪ��ͬѹ���£���V01��V03������ϵ���濪�ȵı仯���ơ�����ͼ4��֪������ϵ���Ƿ��ŵĹ������ԣ��뷧�ſ����йأ�V01��V03Ϊͬһ���ͷ������ཬ�ܵ��в���λ�ò�ͬ��������ϵ�������˱仯��������Ϊ�ڹཬ��·���Ŷ��£���ͬλ�ö�̬����ѹ����ͬ����������ϵ��������Ϊ����GPACϵͳ���Ƴ����ṩ�˼������ݡ�

ͼ4 ���ڷ�V01��V03����ϵ���仯����
Fig. 4 Tendency charts of damping characteristic of valves V01 and V03
2.3.3 �ཬѹ���Զ�����
ͼ5��ʾΪ�趨2.5 MPaѹ�����з�������ʱ���ཬѹ���Ľ�Ծ��Ӧ���ߡ�����ͼ5��֪����GPACϵͳ�Զ������£��ཬѹ����0�ܿ������趨ֵ���ң�������ʱ��IJ���������ƽ�⣬�ȶ�ͣ�����趨ѹ���ϡ���˵��GPACϵͳ���Ʊȳ���PID���ƾ��и�С�ij��������̵���ʱ�䣬����������ģ�������ڹ����㸽����С��Χ��û����̬������Ӧʱ��̣ܶ����Զ����ƾ��Ƚϸߡ�
ͼ6��ʾΪ��2.0 MPa��4.0 MPaѹ���ཬʱ����·��ʵ��ཬѹ���ı仯���̡����У�A��Ϊģ���Ŷ��¹ཬѹ����ֵ�����ĽΣ�B��ΪGPACϵͳ�Զ����Ƶ���Ӧ�Σ�C��Ϊѹ����GPACϵͳ�����������ȶ��ĽΡ�

ͼ5 �ཬѹ���趨Ϊ2.5 MPaʱ�Ľ�Ծ��Ӧ����
Fig. 5 Step response curves of grouting pressure of 2.5 MPa

ͼ6 �ཬѹ���趨Ϊ2.0 MPa��4.0 MPaʱѹ�����������
Fig. 6 Changes of pressure fluctuations under designed grouting pressure of 2.0 MPa and 4.0 MPa
��ͼ6(a)��ͼ6(b)��֪���ı��Ŷ���V01������ģ�ⲻͬ����ϵ����K�Ĺཬ�ز㡣�ڹ�·�Ŷ��£��ཬѹ��������ֵ��������Ӧ��2.0 MPa��4.0 MPa��ѹ���趨ֵ����������ȷֱ�ﵽ0.38 MPa��1.05 MPa��Ϊѹ���趨ֵ��19%��26%��ѹ�������ȶ���GPACϵͳ���з��������ʼ�Զ����ƣ��ֱ�5 s��6 s�Ŀ�����Ӧʱ�䣬ѹ�������ֱ𱻿�����-0.100~0.100 MPa��-0.200~0.200 MPa��Χ��(��Ϊѹ���趨ֵ��5%)��ѹ�����Զ����ƺ��ٳ�ֵ�������������ȶ����������˹�����������ѹ����������ʵ����ý������30~60 s�IJ�����ӳʱ���ڽ�ѹ�������ȶ����趨ֵ��15%~20%���ɼ����˹��������ܴ���ʱ�ͽϳ���������������������Ա��ʵ�ʲ����������Ч�ʡ�
ͼ7��ʾΪ����ѹ���Զ����Ƶ�����������ͼ7(a)��֪�����ཬѹ����0~5 MPa��Χ�ڱ仯ʱ��GPACϵͳ�����²�ͬѹ���趨ֵ��ʵ��ѹ����ֵʮ�ֽӽ���ѹ������С���ұ仯���ȶ�������ѹ���趨ֵ�����������������������ֵû�г���ѹ���趨ֵ��5%��ͼ7(b)��ʾΪGPACϵͳ���ƾ��Ⱥ���Ӧʱ��ı仯���ߡ�����ͼ7(b)��֪����������ʱ��εĹཬ��ϵͳ������5~6 s�����ѹ���Զ����ƣ�����ƾ��ȱ�����ѹ���趨ֵ��5%���ڣ����ȶ��ԽϺã�GPACϵͳ�Ŀ�������ָ��ԶԶ�����˹����Ƶ�����ָ�꣬����ཬʩ����ѹ�����Ƶ�Ҫ��
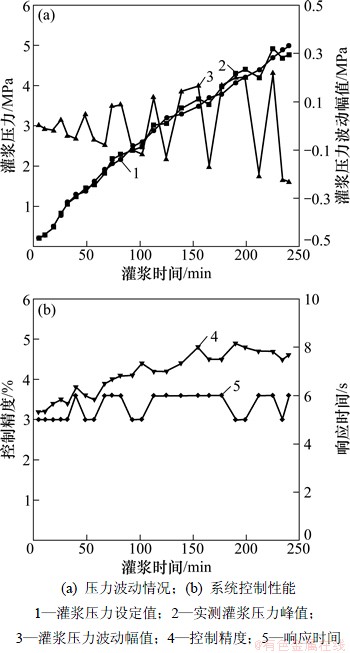
ͼ7 �ཬѹ���Զ�����������
Fig. 7 Results of grouting pressure automatic control test
3 ����
(1) �ཬѹ���IJ�����Ҫ�ܱ���ز��������Ժ͵��ڷ����ȵ�Ӱ�졣���ڲ�ͬ�Ĺཬ������ֻҪ�ཬ�õ�ѡ�ͺ������ȶ����������������Զ�ѹ���Զ����Ƶ�Ӱ��ͽ�С��
(2) ���ڲ���������ģ��PID�㷨�Ŀ��Ƴ���Թཬѹ���ı仯�н�ǿ������Ӧ��������ѹ��ϴ�ʱ��ģ�����Ƽӿ���Ӧ�ٶȣ���ѹ���Сʱ��������̬���л�PID���ƣ����������߿��ƾ��ȡ����Ƴ���PLC���ŷ�������������͵綯���ڷ���������Ч��ϣ�ʵ���˸��ݼ����������������ѹ��ж�ɣ���Ч������ѹ���IJ�����
(3) GPACϵͳ�ɽ�0~5 MPa��Χ�ڵ�ѹ���Զ����ƾ��ȱ�����ѹ���趨ֵ��5%���ڣ�������Ӧʱ��Ϊ5~6 s������Ӧ�죬���ȸߣ��ȶ��Ժã�����ཬʩ����ѹ������Ҫ������Чȡ���˹�ѹ�����ơ�
�ο����ף�
[1] �ž���. �ӻ�������ཬ����[M]. ����: �й�ˮ��ˮ�������, 2002: 75-103.
ZHANG Jingxiu. Technology of base of dam permeate proof and grouting[M]. Beijing: Chinese Water Resources and Hydropower Press, 2002: 75-103.
[2] Kutzner C. Grouting of rock and soil[M]. Rotterdam, Brookfield: A.A. Balkema, 1996: 26-52.
[3] �����. �ཬѹ������ϵͳ�Ĺؼ������о�[D]. ��ɳ: ���ϴ�ѧ��Ϣ��ѧ�빤��ѧԺ, 2009: 15-19.
LI Fengling. Research on key technologies of grouting pressure control system[D]. Changsha: Central South University. School of Information Science & Engineering, 2009: 15-19.
[4] ̷����. �ҹ��ӹ������ķ�չ[J]. ˮ������, 2004, 30(12): 60-63.
TAN Jingyi. The development of dam construction technology in China[J]. Water Power, 2004, 30(12): 60-63.
[5] ZHANG Min, WANG Xinghua, WANG You. Numerical evaluation of uplifting effect for upper structure by grouting[J]. Journal of Central South University of Technology, 2012, 19(2): 553-561.
[6] YANG Xiaoli, ZOU Jinfeng. Estimation of compaction grouting pressure in strain softening soils[J]. Journal of Central South University of Technology, 2009, 16(4): 653-657.
[7] �����, ������, ��Ⱥ̫. ���ڿ���֧���������㷨�Ĺཬ�ز�ʶ��[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2009, 40(2): 478-483.
LI Fengling, XU Lisheng, SHEN Quntai. Grouting stratum identification with fast support vector machine[J]. Journal of Central South University: Science and Technology, 2009, 40(2): 478-483.
[8] ��ΰ. ��϶����ཬѹ�������ȶ��Կ��Ʒ����о�[D]. ��ɳ: ���ϴ�ѧ��ѧ�뻷������ѧԺ, 2008: 15-20.
CHEN Wei. Study on grouting pressure and its stabilization controlling method in fractured rock mass[D]. Changsha: Central South University. School of Geoscience and Environmental Engineering, 2008: 15-20.
[9] ���, ������, ��ǿ, ��. �����������ѹཬѹ���о�[J]. ������ѧ, 2008, 29(7): 1802-1806.
ZOU Jinfeng, XU Wangguo, LUO Qiang, et al. Study on grouting pressure of fracture grouting in saturated soil[J]. Rock and Soil Mechanics, 2008, 29(7): 1802-1806.
[10] Eriksson M, Stille H, Andersson J. Numerical alculations for prediction of grout spread with account for filtration and varying aperture[J]. Underground Space Technology, 2000, 15(4): 353-364.
[11] ����, ������, ����, ��. ���ʽѹˮ���ıõ�ѹ����������[J]. ��е����ѧ��, 2012, 48(14): 164-168.
ZHANG Ning, YANG Minguan, LI Zhong, et al. Pressure pulsation of centrifugal pump with tilt volute[J]. Journal of Mechanical Engineering, 2012, 48(14): 164-168.
[12] ����, �����, �«�, ��. �IJ����ཬ��ѹˮ���ϵͳ�����[J]. ��������ϵͳ, 2010, 29(9): 107-109.
XU Meng, PENG Zhenbin, CHEN Xun, et al. Design of four-parameter detection system for grouting and water-pressing[J]. Transducer and Microsystem Technologies, 2010, 29(9): 107-109.
[13] XIONG Jijun, ZHENG Shijun, HONG Yingping, et al. Measurement of wireless pressure sensors fabricated in high temperature co-fired ceramic MEMS technology[J]. Journal of Zhejiang University: Science C, 2013, 14(4): 258-263.
[14] ���Ӣ. ����PLC��Һѹʵ��̨���ϵͳ�Ŀ���������[D]. ��ɳ: ���ϴ�ѧ��Ϣ��ѧ�빤��ѧԺ, 2010: 26-48.
LI Deying. The development and research of the hydraulic test stand monitoring system based on PLC[D]. Changsha: Central South University. School of Information Science & Engineering, 2010: 26-48.
[15] ��ΰ, �ҽ�, ����, ��. ����ʱ��ķ�����PIDԤ�⺯�����ſ�����[J]. �����DZ�ѧ��, 2011, 32(11): 2461-2467.
GUO Wei, NI Jiajian, LI Tao, et al. Improved fractional-order PID predictive function excitation controller based on time domain[J]. Chinese Journal of Scientific Instrument, 2011, 32(11): 2461-2467.
[16] ���Ǻ�, �ι�. T-Sģ������ϵͳ���ȶ��Է�����ϵͳ�����[J]. �Զ���ѧ��, 2004, 30(5): 731-741.
XIU Zhihong, REN Guang. Stability analysis and systematic design of T-S fuzzy control system[J]. Acta Automatica Sinica, 2004, 30(5): 731-741.
[17] Etedali S,Sohrabi M R, Tavakoli S.Optimal PD/PID control of smart base isolated buildings equipped with piezoelectric friction dampers[J]. Earthquake Engineering and Engineering Vibration, 2013, 12(1): 39-54.
[18] ����, �ٴ���, ��С��, ��. Ӧ��ʽ�;���ѹ����������һ�廯��Ƽ���PID����[J]. ��ѧ���ܹ���, 2013, 21(3): 709-716.
WANG Geng, GUAN Chunlin, ZHANG Xiaojun, et al. Design and control of miniature piezoelectric actuator based on strain gauge senser[J]. Optics and Precision Engineering, 2013, 21(3): 709-716.
[19] ����,����,����ƽ. ƽѹ�������ģ��PID�����������о�[J]. ������ͨ��ѧѧ��, 2011, 45(7): 76-81.
WEN Le, GAO Lin, DAI Yiping. Study on fuzzy PID control of turbine-driven centrifugal compressor[J]. Journal of Xi��an Jiaotong University, 2011, 45(7): 76-81.
[20] DL/T 5148��2012, ˮ��������ˮ��ཬʩ�������淶[S].
DL/T 5148��2012, Technical specification for construction for cement grouting of the hydraulic structures[S].
(�༭ �²ӻ�)
�ո����ڣ�2013-04-20�������ڣ�2013-06-22
������Ŀ��������Ȼ��ѧ����������Ŀ(51208514)��������С��ҵ���»���������Ŀ(12C26214304879)�����ϴ�ѧ�����У��������ҵ���ר���ʽ�������Ŀ(2011QNZT007)
ͨ�����ߣ�����(1981-)���У����ϳ�ɳ�ˣ���ʦ�����µ��ʹ��̺ཬ���������DZ����о����绰��13975809372��E-mail��x1950217@126.com

