弱信号下BDS接收机卫星信号发射时间恢复方法
吴鹏,龚航,刘文祥,王飞雪
(国防科技大学 电子科学与工程学院,湖南 长沙,410073)
摘要:传统的GPS弱信号定位算法存在对本地概略位置和时钟精度要求高的问题。针对这一不足,提出一种混合星座分步解算的弱信号定位算法。首先通过GEO观测数据将用户位置误差压缩到20 km,降低算法对本地时钟精度要求,其次加入非GEO卫星改善DOP值,计算接收机精确位置。相对于传统弱信号定位方法,本文算法将接收机本地时钟精度要求,理论上可由187.5 s增大至1 500 s。B1频点实测数据分析结果表明:当无法获得较准确概略位置时,本文方法可将本地时钟偏差允许范围提高达2 h以上;与传统方法相比,可以在最不利的情况下,减少近一半的初次信号发射时间整秒模糊搜索的计算量。
关键词:全球导航卫星系统;北斗卫星导航系统;弱信号;信号发射时间恢复
中图分类号:TN967.1 文献标志码:A 文章编号:1672-7207(2014)10-3435-08
Method for BDS receiver satellite time-of-transmission recovery in weak signal environment
WU Peng, GONG Hang, LIU Wenxiang, WANG Feixue
(College of Electronic Science and Engineering, National University of Defense Technology, Changsha 410073, China)
Abstract: There is a problem that the local approximate location and clock accuracy are required to be high when traditional GPS weak signal positioning algorithm is applied. In response to this shortage, a positioning algorithm was proposed by using the step-by-step solution for mixed constellation in a weak signal environment. First, compressing the user position error to 20 km through the GEO observation data, thereby the local clock accuracy requirements were reduced, and then the precise location of the receiver was calculated by adding non-GEO satellites which can improve the DOP value. Relative to the traditional weak signal positioning method, local receiver clock accuracy requirements can be relaxed from 187.5 s to 1 500 s by this proposed algorithm academically. B1 frequency measured data results show that the allowed range of local clock deviation can be up to 2 h through the above method, when accurate approximate location can not be gotten. Simultaneously, nearly half of the calculation amount is reduced compared with the traditional method, when the initial fuzzy search is in the most adverse circumstances.
Key words: global navigation satellite system (GNSS); Beidou navigation satellite system (BDS); weak signal; signal transmission time recovery
导航接收机通过测量卫星信号发射时刻结合本地时间确定伪距值,从而完成定位解算任务。卫星信号时间一般由导航电文确定的毫秒级以上整数时间及伪码相位测量获得的毫秒级以内的时间共同组成[1-2]。但由于存在遮挡、森林衰减、信号干扰等,接收机收到信号载噪比衰减可能达到10~35 dB[3],接收机往往不能接收或者不能完整接收电文信息进行位同步、帧同步以获得卫星信号发射时间的毫秒整数部分,无法利用传统方法完成定位解算。辅助型GPS接收机(Assisted-GPS)[4]是利用将接收机毫秒时间设为待求未知数的方法,引入第5颗卫星观测方程进行求解。接收机利用移动蜂窝网络(GSM)等辅助方法获取用户的概略位置和时间、卫星电文等信息,在解得接收机毫秒时间后,可以进行定位解算。关于恢复信号发射时间的算法,GPS接收机的应用已经有大量学者进行研究。文献[5]提出了卫星发射时间的毫秒算法原理以及全球应用时的问题,证明了当概略位置或本地钟差满足限定条件时,若采用遍历的方法搜索,则需要1.5× 107次搜索尝试,无法在实际工程中应用;文献[6-9]论证了对接收机可以通过5颗卫星的伪码相位测量值确定卫星时间的毫秒整数,从而完成定位计算,但均需要满足条件,即钟差已知,概率位置误差150 km内,或等效为位置已知,接收机等效钟差误差在187.5 s以内;文献[10-11]进一步研究了当概略位置不确定时的搜索范围,并对位置误差超限时的计算量进行了量化分析,研究了参与解算的观测卫星数不同时对搜索次数的影响,证明卫星数越少,搜索速度越快;在GPS系统中,以MEO卫星相对地表静止接收机最大速度800 m/s为例,当接收机钟差超过187.5 s时,卫星信号发射时间的毫秒时间模糊不确定,搜索次数导致的计算量至少成243倍增长,不易于实际应用[11]。获得较准确的接收机本地概略位置和本地钟差是GPS信号发射时间恢复算法的关键。接收机的本地时钟误差通过影响卫星位置的计算,从而影响解算方程中的伪距估计值,也可视为等效的接收机概略位置误差。在本文中,将本地概略位置误差与本地时钟误差引起的最大等效概略位置误差之和,称为等效误差和,记为△P。
 (1)
(1)
式中:|△u|为接收机概略位置误差;|v|为所有观测卫星中相对地表接收机的速度最大值;|△t|为开机时的时间估计误差。在|△u|与|△t|一定时,降低|v|,可以降低△P,有利于扩大算法的适用范围和降低初次计算时的卫星毫秒整数模糊度搜索的计算量。我国的BDS系统是采用混合星座的导航系统[2],截止到2012年底,在轨工作卫星有5颗地球静止轨道(GEO)卫星、4颗中地球轨道(MEO)卫星和5颗倾斜地球同步轨道(IGSO)卫星。按照我国BDS建设规划,到2020年之前,主要实现中国及周边亚太地区的24 h全天候定位授时服务。主要靠全天可见的GEO卫星和其他IGSO、MEO卫星保障,其中IGSO卫星轨道周期为24 h左右,MEO卫星轨道周期为12 h左右,如何最大化的利用GEO卫星和周期可见的IGSO、MEO卫星是现阶段BDS主要的研究问题。BDS特殊的GEO卫星具有信号覆盖范围较大,可见时间长的优点,根据这个特点可以计算出当接收机概略位置无误差时,接收机本地时钟的误差允许的最大范围,可以达到1 500 s。本文作者提出一种基于BDS混合星座的恢复算法,即压缩分步法。当具有高程信息辅助时,可直接使用4颗GEO卫星解算得到接收机位置;否则,可利用4颗GEO卫星对位置误差进行压缩,将△P压缩到20 km以内,达到IGSO和MEO的信号发射时间毫秒级整数的解算条件,再进行第2步解算精确位置。
1 BDS接收机时间恢复方法
1.1 BDS星座条件分析
在式(1)中,|△t|通过|v|影响△P,而研究BDS中的时间恢复算法需要对其卫星轨道特征进行分析。
GPS由单一的MEO卫星组成,其相对地表的接收机的速度不超过800 m/s[1-6]。而在BDS星座中,存在3种类型卫星,其轨道数据可以通过接口控制文件(interface control document,ICD)进行确定。但需要注意的是,实际运行时的卫星轨道未必完全符合ICD的定义。这主要是因为卫星在各种摄动因素影响下,会偏离轨道,需要通过轨道机动的方式纠正,尤其是GEO卫星轨道机动更为频繁[12-13]。考虑这些因素,采集BDS中2013年3月份的电文数据,对其轨道信息进行统计分析。
参考文献[6]中的分析方法,画出卫星轨道相对地球运行的几何示意图,如图1所示,其中O为地心,S为卫星,箭头方向为运动方向,r为地球半径,h为卫星轨道半径,β为地球表面用户仰角,α为卫星速度矢量和位置矢量的夹角,γ为卫星速度矢量和用户视线矢量的夹角。设卫星速度为v0,根据几何关系,可以确定,卫星在用户视线矢量方向上的速度投影值v为
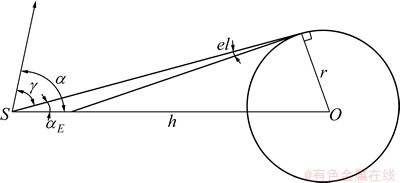
图1 卫星轨道相对地球运行几何示意图
Fig. 1 Sketch of satellite orbit relative to earth geometric
 (2)
(2)
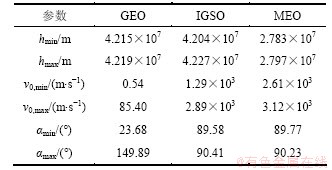
根据采集的电文数据进行分析,统计得到各种类型卫星的运动范围如表1所示。
表1 卫星运动范围
Table 1 Scope of satellite motion
式(2)中,根据余弦函数特征,可知当

即当

可以获得|v|max的表达式如下

当俯仰角β取5°,地球半径r取地球长半轴6 378 137 m时,可得各卫星相对地表静止接收机的运动速度最大值,如表2所示。
表2 卫星相对地表最大速度
Table 2 Max speed of satellite relative to surface

文献[1]中建议考虑最坏情况,同时兼顾一定的小范围接收机动态,所以,将|v|max约定为800 m/s,类似地在BDS中,本文将GEO,IGSO和MEO的|v|max分别约定为100,500和800 m/s。
1.2 伪距残差方程
GNSS接收机中,卫星i的伪距可表示为

其中: 为信号发射时间;tr为本地时间;
为信号发射时间;tr为本地时间; 为时刻的卫星i的位置;u为接收机位置;c为光速;为接收机本地钟差。
为时刻的卫星i的位置;u为接收机位置;c为光速;为接收机本地钟差。
对和又可以分解为由毫秒级部分和毫秒级以下部分,表示如下:


令 ,伪距公式可改写为
,伪距公式可改写为

在弱信号情况下,无法通过导航电文获得卫星时间的毫秒,导致伪距观测方程增加了未知数 。通过已有信息辅助求解,是完成接收机定位解算的前提。
。通过已有信息辅助求解,是完成接收机定位解算的前提。

 为卫星信号传播时延,伪距残差方程可表示为
为卫星信号传播时延,伪距残差方程可表示为


 (3)
(3)
其中: ,为接收机钟差毫秒以内部分导致的伪距测量误差;εi表示观测噪声。
,为接收机钟差毫秒以内部分导致的伪距测量误差;εi表示观测噪声。
1.3 BDS星座条件引入
在残差方程(3)中,考虑卫星时延估计初值τi和φchip的影响,将伪距残差方程在概略位置和估计钟差按泰勒级数展开,忽略二阶以上分量,可得


式中: ,为概略位置的卫星视线矢量;
,为概略位置的卫星视线矢量; 为卫星在
为卫星在 时刻的相对地表接收机最大速度;△τi为卫星估计时延而导致卫星位置误差。根据文献[2],可计算出在卫星信号覆盖范围内,即GEO和IGSO卫星的接收时延为120~138 ms, MEO卫星的接收时延为72~91 ms。计算时,△τi取中间值代入,由此导致的卫星信号发射时间的估计误差,不超过10 ms。如对动态最大的MEO卫星可得卫星三维位置误差最大不超过8 m。相对于△P不超过150 km的应用条件,这里由于△τi引起的误差远小于这个前提,认为可以在方程中忽略。有
时刻的相对地表接收机最大速度;△τi为卫星估计时延而导致卫星位置误差。根据文献[2],可计算出在卫星信号覆盖范围内,即GEO和IGSO卫星的接收时延为120~138 ms, MEO卫星的接收时延为72~91 ms。计算时,△τi取中间值代入,由此导致的卫星信号发射时间的估计误差,不超过10 ms。如对动态最大的MEO卫星可得卫星三维位置误差最大不超过8 m。相对于△P不超过150 km的应用条件,这里由于△τi引起的误差远小于这个前提,认为可以在方程中忽略。有


为了确定方程的解算条件。假设这一残差为0,即已获得解算值,则有


可将卫星发射时间毫秒表示为


其中:d=0.001×c;c为真空中光速,取值为299 792 458 m/s。
1.4 计算的简化条件
当不确定部分
 ≤
≤
时,信号发射时间模糊 不存在多种可能,即唯一。而
不存在多种可能,即唯一。而
 ≤
≤ ≤
≤
由于已将接收机本地钟差的毫秒部分计入表达,其毫秒内的钟差 引起的测量误差
引起的测量误差 ,即绝对值在0.5 ms内[7],所以,计算时,只要确定其他两项和由
,即绝对值在0.5 ms内[7],所以,计算时,只要确定其他两项和由 可能导致的进位问题即可,即考虑
可能导致的进位问题即可,即考虑
 ≤ (4)
≤ (4)
令
 。
。
在处理时,考虑毫秒时间进位的问题,真实的搜索应取区间 。
。
在满足上述条件,且△P小于150 km,即满足快速搜索条件时,直接可以用最小二乘方法确定未知数。
1.5 压缩分步算法
若要在GPS中解算收敛,要求本地时间误差不超过187.5 s。在BDS条件下,选择较低动态的IGSO或GEO卫星,可以将本地时间误差的允许范围增大。
式中: 为已知。则
为已知。则

其中: 可以直接从接收机守时的信息中获取;
可以直接从接收机守时的信息中获取; 从接收机环路跟踪的相位信息获取;u(0)为接收机估计概略位置;利用根据不同卫星类型的不同时延中间值减去估计的τi计算得到。由于无法通过测量等事先获取,在这里进行忽略处理,而根据残差方程解算结果得到。即得到伪距残差方程为
从接收机环路跟踪的相位信息获取;u(0)为接收机估计概略位置;利用根据不同卫星类型的不同时延中间值减去估计的τi计算得到。由于无法通过测量等事先获取,在这里进行忽略处理,而根据残差方程解算结果得到。即得到伪距残差方程为
 (5)
(5)
接收机地表高程辅助测距方程,其表达式[14]为
 ,
,
其中:Ra为地球短半轴;Rb为地球长半轴;h为椭球高估计值。
对伪距残差方程(5)求偏导数[15-16]可以得到以下形式:
其中:
通过观测伪距残差公式可以看出,其在不同类型卫星条件下是一致的。所以,本文提出的压缩分步方法并不限于BDS应用,同样适用于GPS。
2 实验与分析
实验数据选择位于长沙地区的自研BDS接收机接收B1频点C码信号数据,时间为 2013-03-06 T 09:20,选择GEO卫星1~4号,IGSO卫星6号,MEO卫星14号,连续100个历元的数据,时间间隔为1 s。
实验中卫星星座的几何分布精度因子(DOP)的数值,如表3所示。
表3 仿真星座DOP值比较
Table 3 Comparison of simulated constellation DOP values
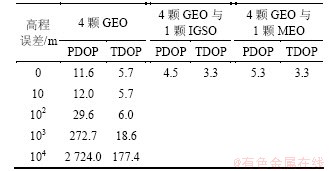
表3中的GEO卫星星座因为有高程信息辅助,其等效DOP值与伪距测量精度、高程的输入精度比值有关,这里BDS接收机的测距误差按6 m计算,列出几个验证的典型值。
2.1 算法精度分析
1) 确定算法初值,获取概略位置和高程信息。辅助BDS位置信息可以通过移动蜂窝网络基站等方法获得概略位置信息和电文信息。高程信息可以通过应用环境如海上或者通过高程气压计进行测量。即使无法获得高程的测量信息,也可以直接估计高程为0 m。
2) 按照本地时间减去BDS卫星的传播时延中间值获取卫星概略信号发射时间的方法,获得的初值。其中GEO和IGSO卫星的传播时延估计为130 ms,MEO卫星估计为70 ms。
3) 利用至少4颗GEO卫星,结合高程输入信息进行迭代解算。若解算的位置高程差异不超过10 km,则认为解算成功,GEO卫星初始卫星时间毫秒整数解算正确;否则,需要重新对进行“+1”搜索。在使用4颗GEO卫星时,最多进行15次搜索。若完成所有搜索都无法成功解算,则解算失败。
4) 完成步骤3)后,就已经确定接收机的概略位置和钟差。该位置精度与用户位置的卫星几何分布和输入高程信息精度有关。
5) 加入1颗非GEO卫星数据,按照步骤3)的方法对卫星的信号发射时间毫秒整数进行搜索,若解算位置与步骤3)误差不超过10 km,并且高程在地表附近,例如取-1~20 km,则认为解算成功。否则认为解算失败。
调整高程辅助信息精度,分别考察3种星座情况,统计定位精度如表4所示。
表4 3种星座情况定位精度
Table 4 Comparison of simulated constellation DOP values m
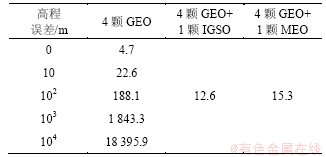
从表4可见:采用纯GEO星座定位时,定位精度主要取决于输入高程误差,并且基本与PDOP值相对应。而采用混合星座定位时,高程信息仅用于等效误差和△P的压缩,在最终的定位精度中并无影响,所以,并不受输入高程信息精度的影响。
2.2 时钟误差适应范围的改善
在采集实测数据基础上,采取以下方式进行评估分析。
1) 每个历元计算位置拉偏的情况,本地概略位置误差为经度、纬度最大误差各为1°,等效为水平距离误差133 km。同时,设置本地高程估计误差为10 km;
2) 在每个历元递增时,设置本地时间误差递增100 s,则第100个历元时间误差为10 000 s;
3) 计算每个时间拉偏值,在概略位置误差在133 km以内,采用传统方法和本文方法在计算卫星信号发射时间恢复的成功率;
4) 分别对4颗GEO与1颗IGSO、4颗GEO与1颗MEO卫星2种情况进行实验,重复步骤1)~4)。
从图2和图3可知:当接收机概略位置误差达到133 km时,接近于等效误差和△P上限时,留给本地时间误差允许的余量|△td|较小。需要说明的是:除了考虑概略位置误差在卫星视线矢量方向的投影对各个卫星误差影响的弱化外,还对时钟误差毫秒内小数的搜索空间增加了一维处理,实测的结果表现出时钟误差的适应范围要大于理论值。
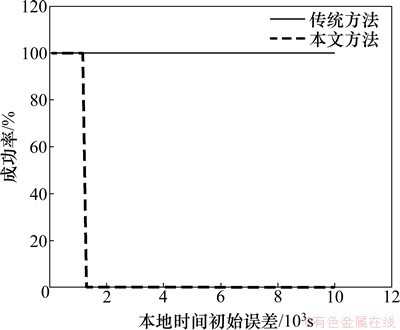
图2 4颗GEO卫星与1颗IGSO卫星解算成功率
Fig. 2 Success rate of solve based on 4 GEO satellite and 1 IGSO satellite
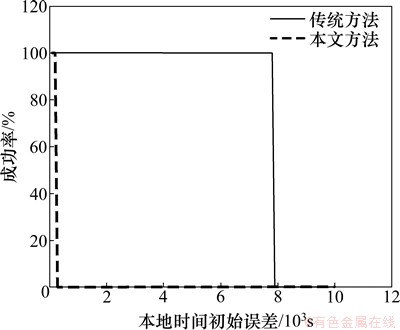
图3 4颗GEO卫星与1颗MEO卫星解算成功率
Fig. 3 Success rate of solve based on 4 GEO satellite and 1 MEO satellite
前面已经说明采用传统方法解算时,解算卫星中最大动态卫星决定了算法对时钟误差的最大适应范围|△td|。对比图2和图3中的传统方法可以发现:当最大动态卫星为IGSO,相比为MEO时,|△td|较大。而在图2和图3各自的2种方法对比中,发现本文算法可以有效利用GEO卫星的低动态特点,进行压缩分步计算,增大成功解算时的|△td|最大范围。此外,对比本文算法在第二步解算时采用的卫星,采用MEO时,|△td|接近8×103 s,而采用IGSO时,|△td|超过10×103 s以上。由此可见,压缩分步的计算方法能通过第一步压缩等效误差和△P (其大小取决于输入高程精度和PDOP),但第2步计算仍受到第5颗解算卫星的动态影响,动态较小的卫星方能获得更大的|△td|适应范围,所以,建议第2步计算在PDOP能保障的前提下,优先选择较低动态卫星,如IGSO卫星。
2.3 计算量分析
文献[11]已有对类似GPS算法的计算量分析,但其分析忽略了2个问题:
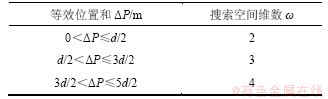
1) 根据方程(4)中的等效位置和取值范围,当其小于d/2时,可确定搜索范围为即每颗卫星的搜索空间为2,用ω表示。每个初始的卫星时间的毫秒整数估计值 都存在进位的可能,所以,搜索空间不能理想的认为为1,ω至少为2。
都存在进位的可能,所以,搜索空间不能理想的认为为1,ω至少为2。
2) 当n颗卫星时间的毫秒整数可能产生取值维数ω时,会产生多个重复的搜索组合,例如全取和全取(+1)时,最终的差异会体现在解算的接收机本地钟差中,这2种情况的钟差差值为1 ms,这种毫秒级的差异只会对卫星位置计算时产生可以忽略的影响。所以,认为第2种搜索组合,可以通过第1种组合全体增加相同数值(如1或2)得到,将这种组合视为冗余组合,不进行搜索。
表5所示为等效误差和△P与ω的关系,搜索空间维数仅取决于△P的范围。
在搜索空间维数ω确定时,所选观测卫星数据越少,初次搜索计算量越小。本文方法采用5颗卫星计算,所以,这里采用5颗卫星时与GPS算法进行比较。
表5 △P与ω的对应关系
Table 5 Correspondence relationship of △P and ω
搜索时只需选择非冗余组合,首选确定n颗卫星中有i颗为0的情况,其次在剩下的(n-i)颗卫星中存在的组合情况为(ω-i)(n-i),则当n颗卫星的搜索维数为ω时,最大搜索次数为 。
。
在最佳情况下,搜索空间维数最小为2。在使用传统方法计算卫星信号时间模糊度,因为最少需要5颗卫星,在模糊度初值最不利情况时需要搜索31次,而本方法只需要4颗卫星,再加入非GEO进行第2次计算,产生最多2次搜索,只需要搜索(15+2)次,可以有效降低实际应用中的计算量。需要指出的是:在进行首次的卫星时间整毫秒搜索时,本文方法最理想情况下,也要进行至少2次解算迭代,不如传统方法最理想情况下只需要1次搜索的情况。在后续的计算中,就不再需要进行搜索,2种方法不存在计算量差异。
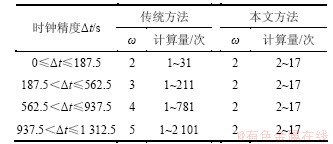
在一般情况下,无法获得高程辅助信息。为了改善卫星几何分布质量,BDS定位所使用的卫星均含有非GEO卫星。在观测卫星总数为5时,分别考虑观测卫星中有IGSO卫星或无IGSO(有MEO)卫星这2种情况,假设概略位置误差为0,即等效位置和△P仅受本地时钟误差影响,对传统方法与本文方法的计算量进行比较,如表6和表7所示。
将本文方法应用于GPS时,可以得到表7中第1种时间精度条件下,即△t≤187.5时,对计算量的预期优化,即从1~31次改善到2~17次。除了最理想情况出现即所有卫星的整毫秒估计的均未发生进位情况外,传统方法只需要1次搜索,其余情况下本文方法在计算量上均较少。
表6 存在IGSO卫星时初始搜索次数范围分析
Table 6 Number of initial search range analysis when IGSO satellite exists
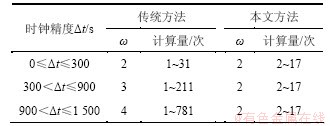
表7 仅存在MEO卫星时初始搜索次数范围分析
Table 7 Number of initial search range analysis when only MEO satellite exists
3 结论
1) 本文方法可以有效解决传统方法应用过程中对接收机本地时钟要求严格的问题。通过GEO观测数据可将用户位置误差压缩到20 km,理论上将本地时钟精度要求由187.5 s增大至1 500 s。当概略位置误差较大时,相对于传统方法,本文方法可以提高钟差适用的范围。
2) 提出实际应用时对计算量估计,应考虑数值进位带来的搜索维数扩展问题。其次对搜索空间中的冗余组合情况进行分析剔除,给出了新的计算量估计的解析式。与传统方法相比,在最不利的情况下,可以减少近一半搜索的计算量。
参考文献:
[1] Kaplan E D, Hegarty C J. Understanding GPS: principles and applications[M]. 2nd ed. Norwood, MA: Artech House, 2006: 113-152.
[2] 北斗卫星导航系统空间信号接口控制文件公开服务信号B1I(1.0版)[EB/OL]. [2012-12-01]. http://www.beidou.org/
BeiDou Navigation Satellite System Signal In Space Interface Control Document Open Service Signal B1I (Version 1.0) [EB/OL]. [2012-12-01]. http://www.beidou.org/
[3] Agarwal N, Basch J, Beckmann P. Algorithms for GPS operation indoors and downtown[J]. GPS Solutions, 2002, 6(3):149-160.
[4] Diggelen F V. Indoor GPS theory & implementation[C]//IEEE Position, Location & Navigation Symposium. CA, 2002: 40- 247.
[5] Sirola N,  J. GPS position can be computed without the navigation data[C]//ION GPS. Portland, 2002: 2741-2744.
J. GPS position can be computed without the navigation data[C]//ION GPS. Portland, 2002: 2741-2744.
[6] Sirola N. A Method for GPS positioning without current navigation data[D]. Tampere: Tampere University of Technology, 2001: 35-39.
[7] Sirola N, J. Solving GPS time and position without navigation data[C]//Proceedings of the ENC-GNSS. Copenhagen, Denmark, 2002: 27-34.
[8] Sirola N. Exhaustive global grid search in computing receiver position from modular satellite range measurements[J]. Journal of Physics: Conference Series, 2006, 52: 73-82.
[9] 宋成, 王飞雪, 庄钊文. 微弱信号下基于模糊度解算的辅助式GPS 接收机定位算法研究[J]. 通信学报, 2009, 30(9): 89-94.
SONG Cheng, WANG Feixue, ZHUANG Zhaowen. Method for assisted-GPS positioning based on ambiguity resolution in weak signal environment[J]. Journal on Communications, 2009, 30(9): 89-94.
[10] 陈陌寒, 巴晓辉, 王云, 等. 辅助式GPS 接收机的快速定位算法研究[J]. 科学技术与工程, 2011, 11(10): 2220-2224.
CHEN Mohan, BA Xiaohui, WANG Yun, et al. A fast positioning algorithm for assisted-global position system[J]. Science Technology and Engineering, 2011, 11(10): 2220-2224.
[11] 曹卉, 袁洪. 辅助式GPS接收机信号发射时间恢复算法研究[J]. 空间科学学报, 2012, 32(3): 585-591.
CAO Hui, YUAN Hong. Method for time-of-transmission recovery based on assisted-GPS positioning[J]. Chinese J Space Sci, 2012, 32(3): 585-591.
[12] 李征航, 张卫星, 龚晓颖, 等. 导航卫星自主定轨时轨道机动问题的处理方法[J]. 武汉大学学报(信息科学版), 2011, 36(11): 1309-1313.
LI Zhenghang, ZHANG Weixing, GONG Xiaoying, et al. Solution of orbit maneuver problem in autonomous orbit[J]. Geomatics and Information Science of Wuhan University, 2011, 36(11): 1309-1313.
[13] 黄华. 导航卫星广播星历参数模型及拟合算法研究[D]. 南京: 南京大学天文与空间科学学院, 2012: 5-6.
HUANG Hua. Research on the Broadcast ephemeris parameters model and its fitting algorithm[D]. Nanjing: Nanjing University. School of Astronomy and Space Science, 2012: 5-6.
[14] 吴鹏, 王飞雪. 北斗系统三星定位中DOP值计算方法及分析[C]//第二届中国卫星导航学术年会. 上海, 2011: 1-6.
WU Peng, WANG Feixue. The method and analysis of DOP calculation in three-satellite positioning in BD system[C]//The Second Sector of the Chinese Satellite Navigation Conference (CSNC). Shanghai, 2011: 1-6.
[15] 鲁郁. GPS全球定位接收机原理与软件实现[M]. 北京: 电子工业出版社, 2009: 116-126.
LU Yu. GPS receiver-principle and software implement[M]. Beijing: Publishing House of Electronics Industry, 2009: 116-126.
[16] Smith P D, Rowe R. Comparative A-GPS and 3G-Matrix testing in a dense urban environment[C]//Proc ION GNSS 19th International Technical Meeting of the Satellite Division. Portland, 2006: 3006-3011.
(编辑 杨幼平)
收稿日期:2013-10-11;修回日期:2013-12-28
基金项目(Foundation item):教育部新世纪优秀人才支持计划项目(NCET-08-0144)(Project (NCET-08-0144) supported by Program for New Century Excellent Talents in University)
通信作者:吴鹏(1983-),男,陕西西安人,博士,讲师,从事卫星导航信息处理算法的研究;电话:0731-84576085;E-mail: wp4nnc@gmail.com

