DOI: 10.11817/j.issn.1672-7207.2017.10.010
�����˶�ƽ̨�������ɶ����ͬʱ��������
��������֣�ϣ����ģ�����ʣ��μ���
(���ϴ�ѧ ���繤��ѧԺ�������ܸ�����������ص�ʵ���ң����� ��ɳ��410083)
ժҪ�����һ��ͬʱ�����˶�ƽ̨�����ɶ����ķ���������ֱ�ļ��������Ϊ�������Խ��⾵��Ϊ��������������������1��б���⾵�;۽��������Թ��λ�ƴ�������ɲ���ϵͳ���о����������ֱ���˶�ƽ̨2��ֱ�߶�����3���Ƕ�����ͬʱ�������Ҳ���ͷ�������ӣ�����ֱ�߶����ķֱ���С��0.1 ��m���Ƕ����ķֱ���С��1�壻ֱ�߶ȺͽǶȲ������ȷֱ�ﵽ1 ��m��5�塣����ϵͳ�ṹ�����ڰ�װ�͵��ڣ��������˶�ƽ̨�����ɶ����ܲ�����
�ؼ��ʣ�ͬʱ�����������ɶȣ��˶���ֱ�������˶�ƽ̨
��ͼ����ţ�TN247 ���ױ�־�룺A ���±�ţ�1672-7207(2017)10-2628-07
Simultaneous measurement of five-degree-of-freedom motion errors of high-precision motion platforms
WANG Lijun, ZHENG Yu, L Wen, LI Jipan, DUAN Ji��an
Wen, LI Jipan, DUAN Ji��an
(State Key Laboratory of High Performance Complex Manufacturing,
School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: A quite simple and novel method for simultaneous measurement of five-degree-of-freedom motion errors was proposed. The collimated laser beam was used as the reference line, and only a cube corner prism was adopted in the moving platform as the sensitive element. The optical system was composed of a rhombic prism, a focus lens and three detectors. The results show that the horizontal and vertical straightness errors as well as pitch, yaw and roll angle errors can be measured simultaneously. At the same time, the measuring head is smart and wireless. The resolution of the straightness and angle errors can reach 0.1 ��m, 1��, respectively, and the measurement accuracy of straightness errors and angular errors are about 1 ��m and 5��within the travel range of a high-precision motion platform. This system is compact and can be easily equipped to any motion platforms to implement the measurement of multi-degree-of-freedom motion errors.
Key words: simultaneous measurement; five-degree-of-freedom; motion errors; collimated beam; high-precision motion platform
�����˶�ƽ̨��ʵ���ɼ���λ������Ĺؼ��������ھ��ܻ�е�ӹ����������������ϡ����ɵ�·�����������Ҫ��Ŀ�깤�����ж���6�����ɶȵIJ����������Ϳ���[1]����ֱ���˶�ƽ̨Ϊ���������ص����˶�ʱ��6�����ɶ��˶���������λ����z��ֱ�߶�����x�͡�y�Լ�3���Ƕ����ƫ�ڽǡ����������ǡ��¡���ת�ǡ��á�Ŀǰ��������Щ�����Ҫ���Dz����Լ��������Ϊ�����ĵ���������������ÿ��ֻ�ܲ���1������������ÿ��������������Ҫʹ�ò�ͬ���͵IJ��������Լ����µ����˶�ƽ̨���������̳��ҽ�����ںܴ������ԣ�����Ȼ�������˶�ƽ̨���ٲ����͵�����Ҫ����ˣ��о������ɶ����ľ��ܲ��������뼼��������λ�õľ�ȷ���ƺ͵�������Ҫ�����塣�����������ڼ�����漼��[2-4]�����似��[5-7]��ֱ����[8-9]���Ӿ���������[10-11]�Ȳ�ͬ�Ĺ�ѧԭ����ӿ�ֳ��˶���ͬʱ�����˶�ƽ̨�����ɶ����ķ�����FAN��[12-13]���һ�ֻ����Ĺ������������ɶ�ͬʱ��������������4������λ�Ʋ����Ǻ�2�����̽���������L�ͷ��侵��ֱ���⾵�ȹ�ѧԪ������ͬʱ����ֱ���˶�ƽ̨�������ɶ������ṹ�ϸ����ҳɱ��ϸߡ�LIU��[14]��ƵIJ���6�����ɶȵ��˶�����ϵͳ���ɴ��������·��������ϼ�������Ǻ�����̽�������ɣ���ʵ�������£��нϸߵIJ������ȣ�����ϵͳ����ͷ���й��£����ʺ�Ŀ��ƽ̨���ٰ�װ������FENG��[15-16]��ֱ�������Ϊ�����������ý��⾵���ֹ�Ƭ������̽�������Ⱥ�ʵ����ֱ�ߵ��������ɶȺ������ɶ�ͬʱ������������ͷ��������ϴ����ڰ�װ�ھ��ܶ��г��˶�ƽ̨�ϡ������������һ�ֻ��ڼ���ֱ�����������ɶ����ͬʱ��������������ͷ����1�����⾵ͬʱ��Ϊֱ�߶ȺͽǶȵ������������̶�������1��б���⾵�;۽��������·����ϸ߾��ȵĹ��λ�ƴ�������ʵ�ֶԾ����˶�ƽ̨�Ķ�άֱ�߶ȼ���άת������ͬʱ����������ϵͳ�Ĺ�ѧԪ�������ҽṹ������ͷΪ������Ƭ�������С���������ӣ����ڰ�װ�͵�����ͨ��ʵ����������Կ��١�ȷ�ز����˶�ƽ̨�˶������е����ܹ����㾫�ܲ�����Ҫ��
1 ����ԭ����ϵͳ
ͼ1��ʾΪ�˶�ƽ̨��6�����ɶ�����ͼ1��֪������ֱ���˶�ƽ̨��Z�����ƶ�ʱ����Ҫ����3��λ�����(��x����y����z)��3���Ƕ����(���������£�����)�����У���λ����z�IJ��������Ѿ����죬����ͨ����ͳ�ļ�������Ǽ���ȷ�ز�����������άֱ�߶����(��x����y)����ά�Ƕ����(����������)��ת�������õ�����������ͬ�������ԭ������·Ҳ��ͬ��
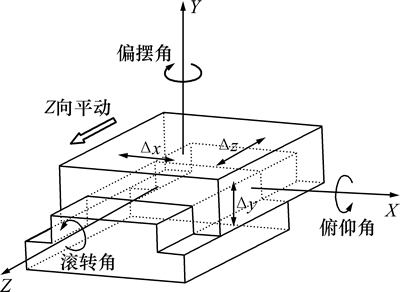
ͼ1 �˶�ƽ̨�������ɶ����
Fig. 1 Six-degree-of-freedom motion errors of a motion platform
1.1 ֱ�߶ȺͽǶȲ���ԭ��
��άֱ�߶�������ԭ����ͼ2��ʾ����������Ԫ����1�����⾵����װ�ڴ�����˶�ƽ̨�ϣ��������������䵽���⾵������䣬��1��������̽����(QD)���ա���ƽ̨�˶�ʱ���ں����С�x�������С�y��ƫ�ƣ�����������������⾵�������QD�Ͼ��ܼ��Ŵ�2����ƫ�ƣ���
 ��
�� (1)
(1)
ʽ�У�X��Y�ֱ�ΪQD�Ͻ��յĹ����ˮƽ����ֱ�����λ�ƣ���x�͡�y�ֱ�Ϊ��Ӧ�����ֱ�߶�����QD��λ�÷ֱ���Ϊ0.1 ��m����ֱ�߶��������۷ֱ����ܴﵽ0.05 ��m��
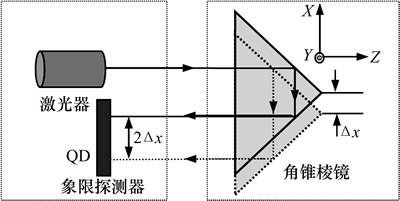
ͼ2 ֱ�߶�������ԭ��
Fig. 2 Schematic diagram for measuring straightness errors
��ά�Ƕ����IJ�������ƽ�淴�侵Ϊ����Ԫ��������ԭ����ͼ3��ʾ������Ԫ����װ�ڴ����˶�ƽ̨�ϣ���������ͨ��1���̶���װ�ķֹ⾵���䵽���侵�ϣ�����صĹ��߾�����(Lens)�۽�����λ������ƽ���λ������̽����(PSD)���ա�ͨ��������֪���÷�����߶��˶�ƽ̨��ƽ�ƺ�ת�����У���ֻ�Ը�����ƫ�����С�����ƽ̨һ���˶���ƽ�淴�侵��������������������ƫ��������ʱ��������������2���ĽǶ�ƫת�������۽���PSD����㷢����Ӧ��λ�ƣ���
 ��
�� (2)
(2)
ʽ�У�X��Y�ֱ�ΪPSD���յĹ����ˮƽ����ֱ�����λ�ƣ������͡��·ֱ�Ϊ��Ӧ����ĽǶ���fΪ���Ľ��ࡣ��ѡ��������f=200 mm��PSD��λ�÷ֱ���Ϊ1 ��m�����ά�Ƕ��������۷ֱ���Ϊ0.5�塣
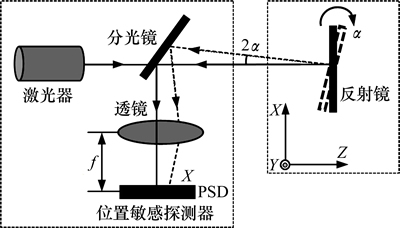
ͼ3 ������(ƫ�ڽ�)������ԭ��
Fig. 3 Schematic diagram for measuring pitch and yaw errors
��ת����������Խ���[17]����ϵͳͨ�����˶�ƽ̨ͬһˮƽλ����2����ͬ�㴦��ֱ�����λ�Ʊ仯����Ӳ�����ת��������������1�����⾵�飬��2�������侵������ɣ���Ϊ����ͷ��װ���˶�ƽ̨�ϡ�����ԭ����ͼ4��ʾ�����й̶�������1��б���⾵�������������IJ�������ͨ����б���⾵�ֳ�����ƽ�й⣬���䵽���⾵����䣬��2��������̽����(QD1��QD2)���ա���ת��Ϊ
 (3)
(3)
ʽ�У�Y1��Y2�ֱ�ΪQD1��QD2�Ͻ��յĹ������ֱ�����λ�ƣ�����Ϊ��ת����hΪ2��ƽ�й���֮��ľ��롣ѡ��h=28 mm��QDλ�÷ֱ���Ϊ0.1 ��m����ת�������������۷ֱ���Ϊ0.4�塣
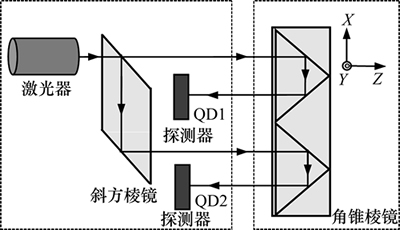
ͼ4 ��ת��������ԭ��
Fig. 4 Schematic diagram for measuring roll error using cube corner prism
1.2 �����ɶ�������ϵͳ
�������ϲ���ԭ����ͼ5��ʾΪһ�������ɶ����ͬʱ��������������װ�����ƶ���ͷ�̶�������ɡ��ȶ��ļ����������Ĺ��߾���б���⾵�ֳ�2��ƽ�й���1��2�����У�����1�����ƶ����ֵĽ����侵�ķֹ�Ĥ�ϣ��������3���ص��̶����֣������۽������λ�����д������ϣ����ƫ�ڽǺ�������������ɽ����侵��������䣬��������̽����(QD1)���գ���ֱ�ӵõ�ֱ�߶�������һ����2���䵽���⾵�ϻ������QD2���գ����QD1���յ���Ϣ����ֺ�õ���ת����
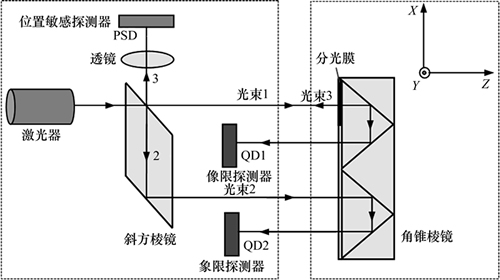
ͼ5 �����ɶ����ͬʱ����ϵͳʾ��ͼ
Fig. 5 Schematic diagram for simultaneously measuring five-degree-of-freedom motion errors
2 ʵ�������
Ϊ��֤����������ϵͳ�Ŀ�������ɿ��ԣ���ʵ���������¶Բ���ϵͳ���б궨ʵ�顢�ظ���ʵ��;��ȶԱ�ʵ�顣
��άֱ�߶Ⱥ���ά�Ƕ��������ı궨���Dz���Ӣ��Renishaw��˾��XL80���������ϵͳ��Renishaw XL80�ǻ���������Ԫ�����������������λװ�þ���У�õĸ������������ܹ��ֱ������λ���ȡ�ֱ�߶ȡ��Ƕȵ������Ŀ��ʵ��װ����ͼ6��ʾ�����У��м䲿���Ǵ��⾫��ֱ���˶�ƽ̨�����氲װ�б�ϵͳ�IJ������⾵��Renishaw XL80�ĽǶȲ������侵��ƽ̨�������Ҳ�ֱ�װ��ϵͳ�����Ĺ�ѧ�����XL80��������ǵļ���ͷ����̶��IJο����侵����ƽ̨�˶�ʱ��ͬʱ�õ���ϵͳ��Renishaw XL80��������ǵĶ�����
2.1 ֱ�߶ȺͽǶȱ궨
Renishaw XL80���������ֱ�߶Ȳ�����ΧΪ��2.5 mm����ֱ�߶ȷֱ���Ϊ0.01 ��m���������ܶ��г��˶�ƽ̨�ľ���Ϊ��0.5 ��m����άֱ�߶����궨ʵ������ͼ7��ʾ����x�͡�y�궨��Χ�ڡ�70 ��m���С��������ϵ��R�ֱ�Ϊ0.999 9��0.999 8��ʵ�ʲ����ֱ��ʿɴﵽ0.1 ��m��
Renishaw XL80��������ǵ�ƫ�ڽǺ����Dz�����ΧΪ��10�㣬�ֱ���Ϊ0.01�壬��������Ϊ��0.1�塣��ά�Ƕ����궨ʵ������ͼ8��ʾ�������͡��±궨��Χ�ڡ�600����У��������ϵ��R�ֱ�Ϊ0.999 9��0.999 8��ʵ�ʲ����ֱ��ʸ���1�塣
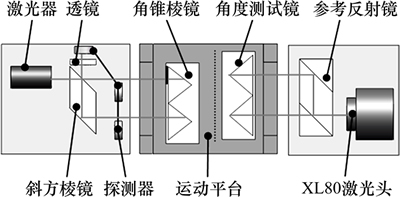
ͼ6 ʵ��װ��
Fig. 6 Experimental setups for errors measurement

ͼ7 ֱ�߶����궨ʵ��
Fig. 7 Calibration results of straightness error
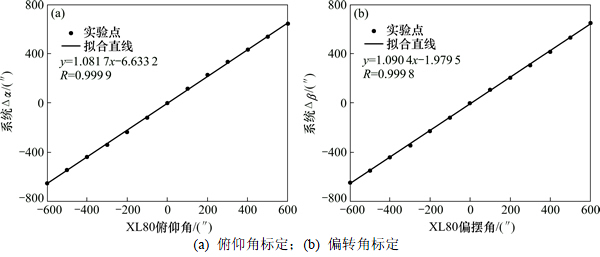
ͼ8 �����Ǻ�ƫ�ڽ����궨
Fig. 8 Calibration results of pitch and yaw errors
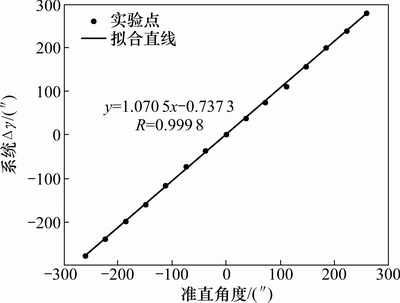
��ת����������ͨ����ƽ̨ͬһˮƽλ����2����ͬ�㴦��ֱ�����λ�Ʊ仯����Ӳ����ģ���ˣ�����ͬʱ��2��������ֱλ�Ƶ�������̽�������б궨���궨ʵ������ͼ9��ʾ����ת�ǡ��ñ궨��Χ�ڡ�300����У��������ϵ��ΪR=0.999 8��ʵ�ʲ����ֱ���ԼΪ1�塣
�ۺ�����ʵ�������Կ�������άֱ�߶�����ά�Ƕȼ���ת�����IJ��������кܺõ�ʾֵ���ԣ������ķֱ���������ֵ������ܹ����о��ܲ�����
ͼ9 ��ת�����궨ʵ��
Fig. 9 Calibration results of roll angle error
2.2 �ظ��ԺͶԱ�ʵ��
ͼ10��ʾΪϵͳ���ظ��Բ���ʵ����(���˶�ƽ̨�г�13 mm������Χ�ڣ���ͬʱ�����3���ظ�����ʵ�飬ÿ1 mm����Ϊ1��������)�����У�ͼ10(a)��ʾΪ��άֱ�߶�X�����ʵ������ͼ10(b)��ͼ10(c)��ʾ�ֱ�Ϊ��ά�Ƕ�(ƫ�ڽ�)��ת���������������ͼ10���Կ�����ϵͳֱ�߶ȺͽǶ����������ظ������ã���Ӧ��ֱ�߶Ȳ�����ƫ�����0.5 ��m���Ƕȴ��ڵ�ƫ�����4�塣���XL80�������ϵͳ��ͬ�������¶��˶�ƽ̨�ظ��Բ��������������Ϊ���ƫ�����Ҫԭ�����˶�ƽ̨����������ڵķ����϶��
ͼ11��ʾΪ����ϵͳ��Renishaw XL80��ͬһ�˶�ƽ̨�����������ĶԱ�ʵ����(ʵ��װ����ͼ6��ʾ)�����˶�ƽ̨�г�13 mm�IJ�����Χ�ڣ�ÿ1 mm����Ϊ1���ԱȲ����㡣ͼ11(a)��(b)��ʾ�ֱ�Ϊ��άֱ�߶ȺͶ�ά�ǶȵĶ���ȶ�ʵ��������ͼ11���Կ�������ƽ̨�˶��ķ�Χ�ڣ�ϵͳ��Renishaw XL80�IJ������ƽӽ���ֱ�߶Ȳ�����֮��ƫ����0.8 ��m���ڣ����ݾ�����С���ݷ����������߲�����ֱ�߶�����൱����ƫ�ڽǶȶ�Ӧ���ƫ����4�����ڡ�
��ʵ�������������˶�ƽ̨�����г��ڣ���άֱ�߶ȡ���ά�Ƕ������������ܹ��ֱ�ﵽ1 ��m��5�壬���ԱȲ�����֮�仹�Ǵ���һ����ƫ��������������ƫ�����Ҫԭ�����¡�

ͼ10 �ظ��Բ���ʵ��
Fig. 10 Experimental results of measurement repeatability

ͼ11 �������Ա�ʵ��
Fig. 11 Comparison experiment results of straightness and angle errors
1) ����ϵͳ�������ڵ�����Ҫ��б���⾵�ͽ��⾵�ļӹ�����ת�����IJ���Ҫ��������������ϸ�ƽ�У������⾵�����ӹ����Ĵ��ڣ�ʹʵ�ʵ�2���ⲻ��������ƽ�й⣬���²����������ƫ�ͬʱ�����⾵��Ϊ���������������������ڵ��������ᵼ��������ߺͳ�����߲����ϸ�ƽ�У���Բ����������Ӱ�졣����ϵͳ������ͨ�������궨����С��
2) ϵͳ���в���ʱ�����⾵������Ԫ������ƽ̨�����ƶ�������ĸ����ǡ�ƫ�ڽ����Ҳ���ֱ�߶ȵ��������������á����ǵ������ľ����˶�ƽ̨�г̽�С��������Ӱ�����ý�С��
3) ���ڶԱȲ�����Renishaw XL80�ǵ�����������������������鰲װ��λ�ü��߶��뱾ʵ��ϵͳ��λ�ü��߶Ȳ�һ�£��Ҳ�����������Եģ����Ա�ʵ������ƫ������˲��ɺ��Ե�Ӱ�졣
4) ��绷��������������Ҫ�ǿ���������������ͱ������̽������Ӱ����ɵ���
3 ����
1) ���һ�ֻ��ڼ���ֱ�����������ɶ��˶����ͬʱ��������������1�����⾵��Ϊ����������1�ΰ�װ���ܹ�ͬʱ����ֱ���˶�ƽ̨2��ֱ�߶�����3���Ƕ�������ϵͳ�ṹ���������㣬����ͷ�����С���������ӣ������ھ����˶�ƽ̨�����ɶ����ͬʱ������
2) ϵͳ�������õ��ظ��Ժ��ȶ��ԣ�����ֱ�߶����ķֱ��ʸ���0.1 ��m���Ƕ����ķֱ�������1�壬ֱ�߶ȡ��Ƕ����������ȷֱ�ﵽ1 ��m��5�塣�÷����ܹ����١�ȷ�ز���ֱ���˶�ƽ̨5�����Զ�λƽ̨��λ�ú���̬����������Ҫ���塣
�ο����ף�
[1] ����, �μ���. ����ӷ�װ�������˶�ƽ̨ĩ����̬����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(5): 1290-1295.
YANG Bo, DUAN Jian. Opto-electronics packaging platform for ultra-precision position and attitude adjustment[J]. Journal of Central South University (Science and Technology), 2011, 42(5): 1290-1295.
[2] MENQ C H, ZHANG Jihua, SHI Jian. Design and development of an interferometer with improved angular tolerance and its application to x�Cy theta measurement[J]. Review of Scientific Instruments, 2000, 71(12): 4633-4638.
[3] ZHANG Caini, WANG Xiangzhao. Sinusoidal phase-modulating laser diode interferometer for measuring angular displacement[J]. Optical Engineering, 2004, 43(12): 3008-3013.
[4] GAO Wei, ARAI Y, SHIBUYA A, et al. Measurement of multi-degree-of-freedom error motions of a precision linear air-bearing stage[J]. Precision Engineering, 2006, 30(1): 96-103.
[5] KIM J A, BAE E W, KIM S H, et al. Design methods for six-degree-of-freedom displacement measurement systems using cooperative targets[J]. Precision Engineering, 2002, 26(1): 99-104.
[6] LIU C H, JYWE W Y, CHEN C K. Development of a simple system for the simultaneous measurement of pitch, yaw and roll angular errors of a linear stage[J]. The International Journal of Advanced Manufacturing Technology, 2005, 26(7/8): 808-813.
[7] HUANG H L, LIU C H, JYWE W Y, et al. Development of a DVD pickup-based four-degrees-of-freedom motion error measuring system for a single-axis linear moving platform[J]. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2010, 224(1): 37-50.
[8] FAN K C, CHEN M J, HUANG W M. A six-degree-of-freedom measurement system for the motion accuracy of linear stages[J]. International Journal of Machine Tools and Manufacture, 1998, 38(3): 155-164.
[9] ����, �����, ����. ��ѧֱ���������뾫�ȷ���[J]. �����뼤���, 2011, 40(2): 282-286.
YANG Zhen, LI Guangyun, HE Lei. Measurement methods and precision analysis of optical collimation[J].Infrared and Laser Engineering, 2011, 40(2): 282-286.
[10] ����, ̷��ƽ, �¹�ǿ, ��. ���������Ӿ��IJ���װ�þ���У����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2014, 45(4): 1072-1076.
WANG Xian, TAN Jianping, CHEN Guoqiang. Active vision-based accuracy calibration technology for measurement devices[J]. Journal of Central South University (Science and Technology), 2014, 45(4): 1072-1076.
[11] ����, ���䲨, ����˫, ��. ���ڶ�ֱ��������ɶȲ�������[J]. �����뼤���, 2014, 43(11): 3597-3602.
L Yong, FENG Qibo, LIU Lishuan, et al. Six-degree-of-freedom measurement method based on multiple collimated beams[J]. Infrared and Laser Engineering, 2014, 43(11): 3597-3602.
[12] FAN K C, CHEN M J. A 6-degree-of-freedom measurement system for the accuracy of X-Y stages[J]. Precision Engineering, 2000, 24(1): 15-23.
[13] FAN K C, CHU C L, LIAO J L, et al. Development of a high-precision straightness measuring system with DVD pick-up head[J]. Measurement Science and Technology, 2003, 14(1): 37-50.
[14] LIU C H, JYWE W Y, HSU C C, et al. Development of a laser-based high-precision six-degrees-of-freedom motion errors measuring system for linear stage[J]. Review of Scientific Instruments, 2005, 76(5): 055110.1-055110.6.
[15] FENG Qibo, ZHANG Bin, KUANG Cuifang. Four Degree-of-Freedom Geometric Error Measurement System with Common-Path Compensation for Laser Beam Drift[J]. International Journal of Precision Engineering and Manufacturing, 2008, 9(4): 26-31.
[16] FENG Qibo, ZHANG Bin, CUI Cunxing, et al. Development of a simple system for simultaneously measuring 6DOF geometric motion errors of a linear guide[J]. Optics Express, 2013, 21(22): 25805-25819.
[17] ����ɽ, ����, ����� ��ת�����Ĺ�ѧ���ܲ��������о�[J]. ��ѧѧ��, 2000, 20(10): 1403-1406.
MA Junshan, WANG Xiangzhao, FANG Zujie. Optical precision measurement technique of rolling error[J]. Acta Optica Sinica, 2000, 20(10): 1403-1406.
(�༭ ����ƽ)
�ո����ڣ�2016-10-07�������ڣ�2016-12-19
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51475479)�����Ҹ��¼����о���չ�ƻ�(863�ƻ�)��Ŀ(2012AA040406)������ʡ��Ȼ��ѧ����������Ŀ(14JJ2010)���㽭��ѧ���嶯�������ϵͳ�����ص�ʵ���ҿ��Ż���������Ŀ(ZKF-201401) (Project (51475479) supported by the National Natural Science Foundation of China; Project (2012AA040406) supported by the National High-Tech R&D Program of China; Project (14JJ2010) supported by the Natural Science Foundation of Hunan Province, China; Project (ZKF-201401) supported by the Open Project of Stage Key Laboratory of Fluid Power Transmission and Control, Zhejiang University)
ͨ�����ߣ�֣�ϣ���ʿ�������ڣ����¼��ɹ���������װ���������뼼���о���E-mail��zhengyu@csu.edu.cn

