DOI: 10.11817/j.issn.1672-7207.2016.11.013
¶ЛЗъГжіЭБӘЦбЖчөДҙҙіЙФӯАнј°ЙијЖ
БЦі¬Ј¬ХФПаВ·Ј¬Фш¶«
(ЦШЗмҙуС§ »ъРөҙ«¶Ҝ№ъјТЦШөгКөСйКТЈ¬ЦШЗмЈ¬400044)
ХӘТӘЈәёщҫЭБӘЦбЖч№ӨЧчФӯАнЈ¬ҪбәПҝХјдЧшұкұд»»АнВЫЎў№ІйоЗъГжЗуҪвАнВЫј°ХэҪ»·ЗФІГжіЭВЦёұҙ«¶ҜФӯАнЈ¬Мбіц¶ЛЗъГжіЭБӘЦбЖчХвТ»РВөДҪб№№РОКҪЈ¬ҪЁБў¶ЛЗъГжіЭБӘЦбЖчЗуҪвөД№ІйоЧшұкПөЈ¬НЖөј¶ЛЗъГжіЭБӘЦбЖчөД¶ЛЗъГжІОКэ·ҪіМЈ¬ЙъіЙ¶ЛЗъГжЈ»ҪбәП¶ЛЗъГжіЭіЭЕМөДјёәОІОКэЙијЖАнВЫЈ¬ІЙУГЎ°№ІйоҪШПЯН¶У°·ЁЎұРВРНіЭГжЙъіЙ·Ҫ·ЁЈ¬НЁ№эsolidworksИнјю¶Ф¶ЛЗъГжіЭіЭГжҪшРРјёәОЗуҪвЈ¬»сөГ¶ЛЗъГжіЭБӘЦбЖчөДБ¬ҪУіЭГжј°К®ЧЦЦбКҪ¶ЛЗъГжіЭНтПтБӘЦбЖчөДИэО¬КөМеДЈРНЈ»Ҫ«¶ЛЗъГжіЭБӘЦбЖчУҰУГУЪТұҪрөИ№ӨіМЙиұёЦРЈ¬СйЦӨ¶ЛЗъГжіЭБӘЦбЖчјёәОЙијЖ·Ҫ·ЁөДХэИ·РФәНФЪ№ӨіМУҰУГЦРөДҝЙРРРФЎЈ
№ШјьҙКЈә¶ЛГжіЭРОЈ»№ІйоЗъГжЈ»БӘЦбЖчЈ»ИэО¬ҪЁДЈ
ЦРНј·ЦАаәЕЈәTH133.4 ОДПЧұкЦҫВлЈәA ОДХВұаәЕЈә1672-7207(2016)11-3707-08
Constructing principle and design of curved-face gear coupling
LIN Chao, ZHAO Xianglu, ZENG Dong
(The State Key Laboratory of Mechanical Transmission, Chongqing University, Chongqing 400044, China)
Abstract: According to the working principle of coupling, spatial coordinate transformation theory, solving theory of conjugate curved surface and the drive principle of curved-face gear, the new structure of the curved-face gear coupling was put forward. The conjugate system of the curved-face gear coupling was established. The parameter equation of the curved-face of the curved-face gear coupling was deduced. According to the geometrical parameter design of curved-face gear coupling theory, the method of conjugate cutting line projection was used to generate the tooth surface. A geometrical mathematical model was built to solve the curved-face gear coupling through the solidworks, which can get the tooth surface and of the curved-face gear coupling 3-D entity model. The applications in the field of engineering facility, such as metallurgy etc, were put forward. The advantages of the curved-face gear coupling in engineering application were verified.
Key words: transverse tooth profile; conjugate curved surface; coupling; 3-D modeling
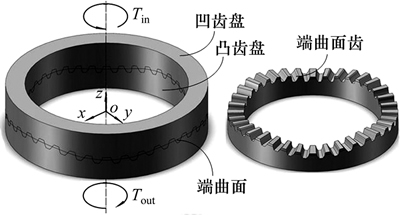
¶ЛГжіЭБӘЦбЖчКЗУГАҙБ¬ҪУБҪЦб»тЦбУл»ШЧӘМеЈ¬ҙ«өЭЧӘҫШәНФЛ¶ҜөДТ»АаБӘЦбЖчЎЈТ»°гөД¶ЛГжіЭБӘЦбЖчУЙ2ёц¶ЛіЭЕМ№ІН¬ЧйіЙЈ¬¶ЛіЭЕМКЗЦёФЪУлБӘЦбЖчЦбПЯҙ№ЦұөДЖҪГжЙПЈ¬ВЦіЭСШФІЦЬҫщФИ·ЦІјөДіЭРОБӘҪУФӘјюЎЈ¶ЛГжіЭБӘЦбЖчФЪҙу№ҰВК¶ҜБҰЧ°ЦГЦРУҰУГ№г·әЈ¬Изҙу№ҰВКМъВ·»ъіөЎўҙу№ҰВКАлРДКҪС№Лх»ъЎўҙуРНІсУН·ў¶Ҝ»ъөДЗъЦбЎўәҪҝХәН№ӨТөУГИјЖшВЦ»ъ»тХфЖыВЦ»ъөДОРВЦЧӘЧУәНС№Лх»ъЧӘЧУөИЙиұёЎЈ¶ЛГжіЭБӘЦбЖчЧоФзУЙGleason№«ЛҫМбіц[1]Ј¬°ҙХХВЦіЭҪб№№·ЦОӘ»ЎіЭј°ЦұіЭ2ЦЦРОКҪЎЈ¶ФУЪ»ЎіЭ¶ЛГжіЭБӘЦбЖчЈ¬Gleason№«ЛҫКЧПИҪйЙЬБЛ»ЎіЭ¶ЛіЭБӘЦбЖчјёәОЙијЖј°јУ№Ө№эіМЈ¬ЛжәуСРҫҝХЯМбіц»ЎіЭ¶ЛіЭЕМјёәОЙијЖј°Зҝ¶ИјЖЛг·Ҫ·Ё[2]ЎўҪшРР»ЎіЭ¶ЛіЭБӘЦбЖчөДЗҝ¶И·ЦОц[3]Ўў»ЎіЭ¶ЛіЭБ¬ҪУВЭЛЁУҰБҰЧҙМ¬·ЦОц[4]ТФј°»ЎіЭ¶ЛіЭЕМөДҪУҙҘ·ЦОц[5]Ј¬ЦБҪс»ЎіЭ¶ЛіЭБӘЦбЖчөД·ўХ№ТСҪПіЙКмЎЈ¶ФУЪЦұіЭ¶ЛГжіЭБӘЦбЖчЈ¬НхИ«ПИөИ[6]НЖөјБЛЦұіЭ¶ЛіЭЕМВЦіЭЗҝ¶ИРЈәЛ№«КҪЈ¬ҝЙ°ҙХХJB/T 3242ЎӘ1993[7]СЎИЎІОКэҪшРРЙијЖЈ¬ёшіцБЛҪПЗЎөұөДЙијЖ·Ҫ·ЁЎЈМЖҪшФӘөИ[8]УЦҪшТ»ІҪМбіцТ»ЦЦЦұіЭ¶ЛіЭЕМјёәОІОКэЙијЖ·Ҫ·ЁУлПаУҰНдЗъЗҝ¶ИРЈәЛјЖЛ㹫КҪЈ¬ёГ·Ҫ·ЁУЕ»ҜБЛ¶ЛіЭЕМјёәОЙијЖЎЈЧЫЙПЛщКцЈ¬ПЦУРөД¶ЛГжіЭБӘЦбЖчҫщОӘФЪ¶ЛЖҪГжЙПІјіЭөДРНКҪЈ¬ЙРГ»УРҪ«ЗъГжЙПІјіЭУҰУГУЪБӘЦбЖчөДСРҫҝЎЈОӘҙЛЈ¬ұҫОДЧчХЯМбіц¶ЛЗъГжМЭРОіЭБӘЦбЖчөДРОКҪЈ¬ІўУл¶ЛГжМЭРОіЭБӘЦбЖчҪшРР¶ФұИ·ЦОцЎЈ¶ЛЗъГжіЭБӘЦбЖчІ»Н¬УЪ¶ЛГжіЭБӘЦбЖчЈ¬Жд¶ЛіЭЕМөДВЦіЭІў·ЗҫщФИ·ЦІјФЪУлБӘЦбЖчЦбПЯҙ№ЦұөДЖҪГжЙПЈ¬¶шКЗіКТ»¶Ё№жВЙ·ЦІјФЪАаЛЖФІЦЬІЁРОөДЗъГжЙПЎЈёщҫЭЗъГж№ІйоАнВЫЈ¬ёГЗъГжУлНЦФІіЭВЦҪЪЗъГж»ҘОӘ№ІйоЗъГж[9]Ј¬ІўЗТЖдіЙ¶ФФЛ¶ҜјдөДДЪФЪБӘПөәНПа»ҘЧӘ»»№жВЙ·ыәПХэҪ»·ЗФІГжіЭВЦёұөДДцәПҙ«¶Ҝ№жВЙЎЈ¶ЛЗъГжіЭБӘЦбЖчМШКвөДВЦіЭ·ЦІјРОКҪА©ҙуБЛВЦіЭәбҪШГж»эәНҪУҙҘГж»эЈ¬УРР§МбёЯБЛЖдФШәЙіРФШДЬБҰЎЈЛьДЬТФёьРЎөДіЯҙзёьәГөШВъЧгёЯҫ«¶ИЎўёЯіРФШДЬБҰәНёЯЙъІъВКөДРиТӘЎЈ
1 ¶ЛЗъГжіЭБӘЦбЖчЙъіЙФӯАн
ЖХНЁөД¶ЛГжіЭБӘЦбЖчЈ¬Жд¶ЛіЭЕМөД¶ЛіЭҫщФИ·ЦІјФЪУлБӘЦбЖчЦбПЯҙ№ЦұөДЖҪГжЙПЎЈёГАаБӘЦбЖч№ӨЧчКұІъЙъөДФШәЙәНіе»чИ«УЙ¶ЛГжіЭАҙіРКЬЈ¬өұ¶ЛГжіЭКЬіе»чФШәЙ·ўЙъ¶ПБСКұЈ¬БӘЦбЖчҪ«ОЮ·ЁјМРш№ӨЧч¶шТэЖрКВ№КЎЈұҫОДЛщЙијЖөД¶ЛЗъГжіЭБӘЦбЖчДЬ№»ҪвҫцЙПКцОКМвЈ¬ІўЗТФЪ¶ФЦРРФЎўіРФШДЬБҰөИ·ҪГжУРҙу·щ¶ИМбёЯЎЈ¶ЛЗъГжіЭБӘЦбЖч¶ЛіЭЕМөД¶ЛіЭіКТ»¶Ё№жВЙ·ЦІјФЪАаЛЖФІЦЬІЁРОөД¶ЛЗъГжЙПЎЈ
¶ЛЗъГжіЭБӘЦбЖчөД¶ЛЗъГжКЗ»щУЪҪвОцЗъГжөД№ІйоЗъГжЗуҪвАнВЫЈ¬НЁ№э№ІйоФЛ¶Ҝ·ҪіМөДјЖЛгЈ¬ЛщЗуҪвөГіцөДУлНЦФІіЭВЦҪЪЗъГжПа№ІйоөД№ІйоЗъГжЎЈИ»¶шЈ¬ҪцНЁ№эҪвОцЗъГжөД№ІйоАнВЫІ»ДЬВъЧгПЦҙъЙијЖУлјУ№ӨјјКхөДРиТӘЈ¬№КұҫОДТІАыУГХэҪ»·ЗФІГжіЭВЦёұөДЙијЖАнВЫ¶Ф¶ЛЗъГжҪшРРБӘәПЗуҪвЎЈ
іЈУГөДіЭРОУРҫШРОЎўМЭРОЎўҫвіЭРОәНИэҪЗРОЎЈҫвРОіЭОЮЦбПт·ЦБҰө«І»ұгУЪҪУәПУл·ЦАлЈ¬МЭРОіЭЗҝ¶ИҪПёЯЈ¬іе»чРЎ№КУҰУГҪП№гЈ¬ҫвіЭРОіЭЗҝ¶ИЧоёЯө«Ц»ДЬҙ«өЭөҘ·ҪПтЧӘҫШ[10]ЎЈұҫОДҫщІЙУГМЭРОіЭЈ¬БҪАаБӘЦбЖчөДФӯАнКҫТвНјИзНј1ЛщКҫЎЈ
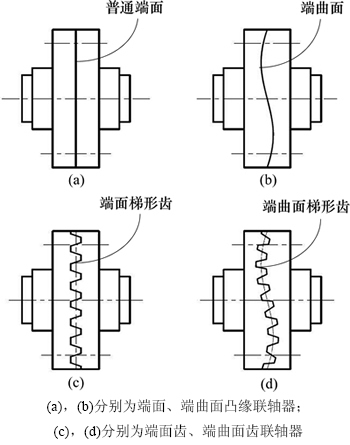
Нј1 БӘЦбЖчЙъіЙФӯАнНј
Fig. 1 Coupling generated schematic diagram
¶ЛЗъГжіЭБӘЦбЖчөД¶ЛЗъГжҙжФЪ¶юҙОіРФШТФј°¶юҙО¶ФЦРөДМШөгЈ¬№К¶ш¶ЛЗъГжіЭБӘЦбЖчҫЯУРёЯіРФШДЬБҰЎўҙ«¶ҜЧӘҫШҙуЎўёЯёХРФТФј°ЧФ¶Ҝ¶ЁРДөДУЕКЖЎЈ
2 ¶ЛЗъГжөДЗуҪв·Ҫ·Ё
ҪвОц·ЁЗуҪв№ІйоЗъГжөДТ»ёцЦШТӘДЪИЭҫНКЗ№ІйоМхјюөДҪЁБўәНұд»»Ј¬ОӘҙЛ, ҪЁБўИзНј2ЛщКҫөДЧшұкПөЎЈФЪНј2ЦРЈ¬ДёЗъГжStЦёНЦФІЦщіЭВЦҪЪЗъГжЈ¬№ІйоЗъГж Цё¶ЛЗъГжЈ¬ЧшұкПө
Цё¶ЛЗъГжЈ¬ЧшұкПө ОӘУлДёЗъГжSt№МҪбЈ¬ЖдИЖЧЕ
ОӘУлДёЗъГжSt№МҪбЈ¬ЖдИЖЧЕ өД
өД ЦбДжКұХлРэЧӘБЛ
ЦбДжКұХлРэЧӘБЛ Ј»ЧшұкПө
Ј»ЧшұкПө Ул№ІйоЗъГж№МҪбЎЈ
Ул№ІйоЗъГж№МҪбЎЈ ОӘёЁЦъ¶ҜЧшұкПө,ЖдИЖЧЕөД
ОӘёЁЦъ¶ҜЧшұкПө,ЖдИЖЧЕөД ЦбЛіКұХлРэЧӘБЛ
ЦбЛіКұХлРэЧӘБЛ Ј¬ІўЗТәН
Ј¬ІўЗТәН ЦШәПЈ»
ЦШәПЈ» ОӘёЁЦъ¶ҜЧшұкПө, ЖдСШЧЕөД
ОӘёЁЦъ¶ҜЧшұкПө, ЖдСШЧЕөД ЦбЛ®ЖҪТЖ¶ҜRЈ»ОӘёЁЦъ¶ҜЧшұкПөЈ¬ЖдСШЧЕөД
ЦбЛ®ЖҪТЖ¶ҜRЈ»ОӘёЁЦъ¶ҜЧшұкПөЈ¬ЖдСШЧЕөД Цбҙ№ЦұТЖ¶Ҝ
Цбҙ№ЦұТЖ¶Ҝ Ј¬¶шәуУЦИЖЧЕЧФЙнЧшұкПөөД
Ј¬¶шәуУЦИЖЧЕЧФЙнЧшұкПөөД ЦбЛіКұХлРэЧӘБЛ90ЎгЎЈФЪЧшұкПөЦРЈ¬ДёЗъГжStЦщЧшұк·ҪіМОӘ
ЦбЛіКұХлРэЧӘБЛ90ЎгЎЈФЪЧшұкПөЦРЈ¬ДёЗъГжStЦщЧшұк·ҪіМОӘ

Нј2 №ІйоЧшұкПөөДҪЁБўУлұд»»
Fig. 2 Establishment and transformation of conjugate system
 (1)
(1)
КҪЦРЈәОӘНЦФІ·ҪіМөДј«ҪЗЈ»aОӘНЦФІөДіӨ°лЦбЈ»kОӘНЦФІөДЖ«РДВКЈ»bОӘДёЗъГжөДҝн¶ИЈ»ЙПұкұнКҫЛщКфЧшұкПөЈ»ПВұкұнКҫКёБҝ¶ЛөгЛщФЪЗъГжЎЈФЪЧшұкПөЦРЈ¬ДёЗъГжStөДҫШХу·ҪіМОӘ
 (2)
(2)
КҪЦРЈәA21ОӘУЙЧшұкПөөҪөДұд»»ЦРөДРэЧӘұд»»ҫШХуЈ»ОӘёЁЦъ¶ҜЧшұкПөИЖЧЕz2ЦбРэЧӘөДҪЗ¶ИЎЈ
ёщҫЭҝХјдЧшұкЧӘ»»ФӯАнЈ¬ЧшұкПөөҪөДұд»»ЦРөДРэЧӘұд»»ҫШХуОӘ
 (3)
(3)
№ІйоМхјюОӘ

ЖдЦРЈә Ј»ПВұкәНұнКҫәҜКэКёБҝ
Ј»ПВұкәНұнКҫәҜКэКёБҝ ¶ФёГІОКэөДЖ«өјКэЎЈҪ«№ІйоМхјюУлЧшұкПөЦРДёЗъГжStөД·ҪіМБӘБўЈ¬ҫНөГөҪ№ІйоЗъГжEөДҪвОцҫШХу·ҪіМЈә
¶ФёГІОКэөДЖ«өјКэЎЈҪ«№ІйоМхјюУлЧшұкПөЦРДёЗъГжStөД·ҪіМБӘБўЈ¬ҫНөГөҪ№ІйоЗъГжEөДҪвОцҫШХу·ҪіМЈә
 (4)
(4)
¶ЁТеn2ОӘ¶ЛЗъГжөДҪЧКэЈ¬ұнКҫёГ¶ЛЗъГжФЪ ·¶О§ДЪУлДёЗъГжSt№Ійо№ц¶ҜөДЦЬЖЪёцКэЎЈёщҫЭ¶ЛЗъГж·вұХөДМхјюУР[11]
·¶О§ДЪУлДёЗъГжSt№Ійо№ц¶ҜөДЦЬЖЪёцКэЎЈёщҫЭ¶ЛЗъГж·вұХөДМхјюУР[11]
 (5)
(5)
КҪЦРЈәi12ОӘХэҪ»ұдҙ«¶ҜұИГжіЭВЦёұҙ«¶ҜұИЎЈ
ёщҫЭКҪ(1)әНКҪ(5)ЛгөГRЈ¬ҙъИлКҪ(4)өГөҪ¶ЛЗъГжіЭБӘЦбЖчөД¶ЛЗъГжІОКэ·ҪіМОӘ
 (6)
(6)
ИЎn2=2Ј¬ КұЈ¬¶ЛЗъГжНјРОИзНј3ЛщКҫЈ¬ОӘұнҙпЗеОъЈ¬НјЦРҪцПФКҫБЛ¶ЛЗъГжДЪНвұЯПЯЎЈҝЙјы¶ЛЗъГжЛжЖ«РДВКөДФцҙуЈ¬ІЁ·щ»бұдҙуЈ¬ДЪНвҫ¶І»ЧчёДұдЎЈ¶ЛЗъГжІЁ·щұд»Ҝ»б¶ФБӘЦбЖчөД¶ФЦРРФДЬУл¶ЛЗъГжіЭС№БҰҪЗөИІъЙъУ°ПмЎЈ
КұЈ¬¶ЛЗъГжНјРОИзНј3ЛщКҫЈ¬ОӘұнҙпЗеОъЈ¬НјЦРҪцПФКҫБЛ¶ЛЗъГжДЪНвұЯПЯЎЈҝЙјы¶ЛЗъГжЛжЖ«РДВКөДФцҙуЈ¬ІЁ·щ»бұдҙуЈ¬ДЪНвҫ¶І»ЧчёДұдЎЈ¶ЛЗъГжІЁ·щұд»Ҝ»б¶ФБӘЦбЖчөД¶ФЦРРФДЬУл¶ЛЗъГжіЭС№БҰҪЗөИІъЙъУ°ПмЎЈ
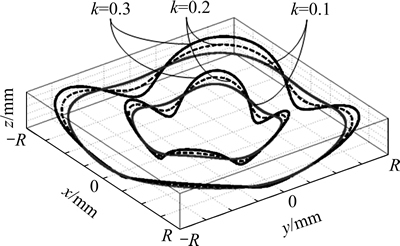
Нј3 ¶ЛЗъГжј°Ж«РДВКkөДУ°Пм
Fig. 3 Curved-face and influence of eccentricity k
3 ¶ЛЗъГжіЭЙијЖ№эіМ
¶ЛЗъГжіЭөДЙијЖ№эіМҫНКЗЦёҪ«ВЦіЭ°ҙХХТ»¶Ё№жВЙ·ЦІјФЪ¶ЛЗъГжЙПөД№эіМЈ¬ЖдФмРНЦұҪУФҙУЪХэҪ»·ЗФІГжіЭВЦЈ¬ІўІЙУГУлЖдПаЛЖөДјУ№Ө·Ҫ·ЁҪшРРЙијЖЎЈ
3.1 јёәОІОКэјЖЛг
¶ЛЗъГжіЭБӘЦбЖчөДіЭРОҪб№№ИзНј4ЛщКҫЎЈНј4ЦРЈәD 1ОӘ¶ЛЗъГжіЭЕМНвҫ¶Ј»D2ОӘДЪҫ¶Ј»BОӘіЭҝнЈ»RОӘҪЪЗъПЯЦщГж°лҫ¶Ј»z2ОӘ¶ЛЗъГжіЭіЭКэЈ»pОӘіЭҫаЈ»haОӘіЭ¶ҘёЯЈ»hfОӘіЭёщёЯЎЈ
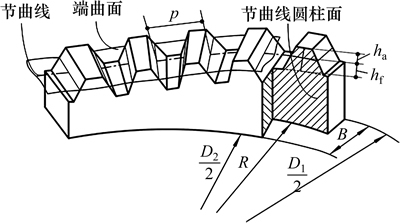
Нј4 ¶ЛЗъГжіЭіЭРОҪб№№КҫТвНј
Fig. 4 Gear tooth structure diagram of curved-face
3.1.1 ІОҝјЦұҫ¶D
АыУГТФПВ№«КҪ[12]іхІҪИ·¶Ё№М¶ЁКҪ¶ЛЗъГжіЭБӘЦбЖчөДіЯҙзЈә
 (7)
(7)
КҪЦРЈәDОӘБӘЦбЖчІОҝјЦұҫ¶Ј»TОӘБӘЦбЖчЧӘҫШЎЈ
3.1.2 ҪЪЗъПЯЦщГж°лҫ¶R
УЙКҪ(5)ҝЙЦӘЈәҪЪЗъПЯЦщГж°лҫ¶RУлНЦФІЦщіЭВЦҪЪЗъПЯөД№ШПөОӘ
 (8)
(8)
КҪЦРЈәRОӘ¶ЛЗъГжіЭБӘЦбЖчөДҪЪЗъПЯЦщГж°лҫ¶ЎЈ
ҪбәПІОҝјНвҫ¶іЯҙзDУлҪЪЗъПЯЦщГж°лҫ¶RЈ¬СЎ¶ЁНвҫ¶D1ЎЈФЪТ»°гЗйҝцПВЈ¬ИЎіЭҝнBОӘБӘЦбЖчНвҫ¶өД0.125ұ¶Ј¬јМ¶шҝЙЗуіцДЪҫ¶D2ЎЈ
3.1.3 ¶ЛЗъГжіЭіЭКэz2
ФЪСЎФсБЛ¶ЛЗъіЭБӘЦбЖчөДіхІҪіЯҙзәуЈ¬ҫНРиТӘИ·¶ЁіЭКэәНіЭҝнЎЈ¶ЛЗъГжіЭөДДЈКэОӘmЈ¬¶ЛЗъГжіЭКэz2УлНЦФІЦщіЭВЦz1өД№ШПөОӘ Ј¬іЭҫа
Ј¬іЭҫа ЎЈ
ЎЈ
3.1.4 ¶ЛЗъГжіЭіЭ¶ҘёЯhaәНіЭёщёЯhf
¶ЛЗъГжіЭөДіЭ¶ҘёЯЎўіЭёщёЯУліЭИ«ёЯөДјЖЛ㹫КҪ[13]ИзПВЈә



КҪЦРЈәhaОӘ¶ЛЗъГжіЭіЭ¶ҘёЯЈ»hfОӘ¶ЛЗъГжіЭіЭёщёЯЈ»mОӘ¶ЛЗъГжіЭөДДЈКэЈ» ОӘіЭ¶ҘёЯПөКэЈ»
ОӘіЭ¶ҘёЯПөКэЈ» ОӘ¶ҘП¶КэЎЈ
ОӘ¶ҘП¶КэЎЈ
3.2 ¶ЛЗъГжіЭіЭГжјёәО·ЁЗуҪв
3.2.1 №ІйоҪШПЯН¶У°·Ё
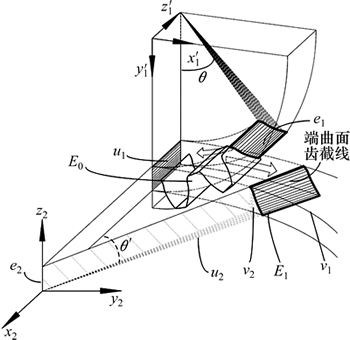
№ІйоҪШПЯН¶У°·ЁКЗЦё»щУЪ№ІйоЗъГжЗуҪвФӯАнөДұкёЛПЯ»г·ЁөДјёәО»ҜЎЈУЙУЪұкёЛПЯ»г·ЁҙъКэұд»»әНјёәОұд»»·ұФУЈ¬јЖЛг№ӨЧчБҝҙуЈ¬ЗТјЖЛг»ъІ»ДЬЦұҪУНкіЙЎЈУЦТтОӘёГұкёЛПЯ»г·ЁөДјёәОЧӘ»»ЧсСӯБЛХэҪ»·ЗФІГжіЭВЦёұЙијЖ№жВЙЈ¬№КұҫОДАыУГДёЗъГжE0Ул№ІйоЗъГжE1өДјёәОЧӘ»»№ШПөЈ¬ІўҪиЦъsolidworksөДЗъГж№№ҪЁ№ҰДЬЈ¬Ҫ«ұкёЛПЯ»г·ЁҪшРРБЛјёәО»ҜұнҙпЈ¬РОіЙБЛТ»ЦЦРВөДіЭГжҙҙҪЁ·Ҫ·Ёјҙ№ІйоҪШПЯН¶У°·ЁЎЈ№ІйоҪШПЯН¶У°·ЁИЖ№эБЛҙ«Ні№ІйоАнВЫ№ШУЪ№ІйоЗъГжұШРлБ¬РшПаЗРҪУҙҘХвТ»ПЮЦЖЈ¬¶шКЗЧЕСЫУЪЗъГжЦ®јдХжКөөДҪУҙҘЗйҝцЈ¬УГұкёЛЙдПЯХвТ»ЦРјдГҪҪйөДҪШИЎАҙГиКцЗъГжЦ®јдКөјКөД№ІйоФЛ¶ҜЎЈЖд»щұҫФӯАнОӘЈәПИЙи¶ЁДёЗъГжE0ФЪЖдЙПёчөгҙҰ°ҙјИ¶Ё·ҪПт·ўіцЎ°ұкёЛЙдПЯЎұЈ¬РОіЙН¶У°ПЯ»гЎЈөұЛщЗу№ІйоЗъГжE1УлН¶У°ПЯ»г°ҙТСЦӘҙ«¶Ҝ№ШПөҪшРР»ШЧӘФЛ¶ҜКұЈ¬Н¶У°ПЯ»гҪ«ұ»№ІйоЗъГжE1ФЪБ¬Рш»ШЧӘПВЛщҪШИЎЈ¬¶шН¶У°ПЯ»гөДЛщУРҪШПЯұгГиКцБЛ№ІйоЗъГжE0ЎЈ
ДёЗъГжE0ЦёНЦФІіЭВЦіЭГжЈ¬№ІйоЗъГжE1Цё¶ЛЗъГжіЭіЭГжЎЈУЙНј5ҝЙҪшТ»ІҪБЛҪв№ІйоҪШПЯН¶У°·ЁөД»щұҫФӯАнәНЗуҪв·Ҫ·ЁЎЈНјЦРe1әНe2·ЦұрҙъұнөҘТ»ЧФЎў№«ЧӘҪЗ¶ИөДЎ°ұкёЛЙдПЯЎұДёПЯЈ»u1әНu2·ЦұрҙъұнЧФЎў№«ЧӘ·ҪПтөДН¶У°ПЯ»гЈ»v1әНv2·ЦұрҙъұнЧФЎў№«ЧӘН¶У°ПЯ»гЗъГжЧйЎЈ
3.2.2 іЭГжЗуҪв№эіМ
ОӘСйЦӨұҫ·Ҫ·ЁөДХэИ·РФЈ¬ҫӯјёәОІОКэјЖЛг·Ҫ·ЁөГіцјёәОІОКэИзұн1ЛщКҫЈ¬ІўТФҙЛОӘАэҪшРР¶ЛЗъГжіЭіЭГжөДЗуҪвЎЈ
Нј5 №ІйоҪШПЯН¶У°·ЁөДјёәОФӯАн
Fig. 5 Method of conjugate cutting line projection
1) јёәОЧӘ»»№ШПөИ·¶ЁЎЈёщҫЭХэҪ»·ЗФІГжіЭВЦёұПа¶ФФЛ¶ҜФӯАнЈ¬јЩЙи¶ЛЗъГжіЭЕМГ«Еч№М¶ЁЈ¬НЦФІЦщіЭВЦөДҪЪЗъГжФЪ¶ЛЗъГжЙПЧчҙҝ№ц¶ҜЈ¬НЦФІЦщіЭВЦөДЧФЧӘҪЗ¶ИУ빫ЧӘҪЗ¶И№ШПө[14]ИзПВЈә
 (9)
(9)
НЦФІЦщіЭВЦіЭГжE0ИЖЦбПЯ·ўіцЎ°ұкёЛЙдПЯЎұ(НкіЙЧФЧӘ)Ј¬РОіЙН¶У°ПЯ»гЎЈ°ҙХХТФЙПјёәО№ШПөИ·¶Ё№«ЧӘҪЗ¶ИЈ¬Н¶У°ПЯ»гҪ«ФЪХвР©ҪЗ¶ИДЪұ»№ІйоЗъГжE1ЛщҪШИЎЎЈИЖ¶ЛЗъГжіЭЕМЦбПЯ·ўіц¶ФУҰёчҪЗ¶ИөДЎ°ұкёЛЙдПЯЎұЈ¬РОіЙН¶У°ПЯ»г(НкіЙ№«ЧӘ)Ј¬БҪН¶У°ПЯ»гЗъГжЧйөДҪ»ПЯјҙОӘұ»·ҙЗуіцөД¶ЛЗъГжіЭҪШПЯЈ¬Б¬ҪУЛщУРҪШПЯјҙНкіЙ¶ЛЗъГжіЭөДіЭГжЗуҪвЎЈ
2)Ў°ұкёЛЙдПЯЎұҪЗ¶ИЗшјдөДИ·¶ЁЎЈИЎНЦФІЦщіЭВЦіЭГжE0өД1/4Іҝ·ЦЈ¬јҙz1/2ёціЭГжЧчОӘЎ°ұкёЛЙдПЯЎұөД·ўЙъЗъГжЈ¬іхКјПаО»Д¬ИП¶ЁОӘіӨ°лЦбОӘYЦбҙ№Цұ·ЕЦГЎў¶М°лЦбОӘXЦбЛ®ЖҪ·ЕЦГЎЈФЪҙ№ЦұУЪНЦФІіЭВЦЦбПЯөДЖҪГжЙПЈ¬Ҫ«ёчөҘТ»іЭГжБҪ¶Лөг·ЦұрУлЦбРДБ¬ПЯЈ¬БҪБ¬ПЯУлYЦбөДјРҪЗјҙОӘёГөҘТ»іЭГжөДЎ°ұкёЛЙдПЯЎұЧФЧӘҪЗ¶ИЗшјдЎЈФЪёГЗшјдДЪЈ¬ТФТ»¶ЁҪЗ¶И(ұҫОДТФ0.5Ўг)»®·ЦіцИфёЙёчЧФҙъұнөҘТ»ЧФЧӘҪЗ¶ИөДЎ°ұкёЛЙдПЯЎұДёПЯЎЈ·ЦұрҪ«ЧФЧӘҪЗ¶ИҙъИлКҪ(9)јҙҝЙЗуіц№«ЧӘҪЗ¶ИЗшјдЎЈ
НЦФІЦщіЭВЦөДіЭКэОӘz1Ј¬ДЈКэОӘmЈ¬НЦФІЦщіЭВЦҪЪЗъПЯФЪ ҪЗ¶ИДЪЧЬіӨ¶ИОӘLЈ¬Жд¶ФУҰөДЗЎәГКЗz1ёціЭҫаЈ¬ФтУҰВъЧгИзПВМхјюКҪЈә
ҪЗ¶ИДЪЧЬіӨ¶ИОӘLЈ¬Жд¶ФУҰөДЗЎәГКЗz1ёціЭҫаЈ¬ФтУҰВъЧгИзПВМхјюКҪЈә

јҙ
 (10)
(10)
КҪЦРЈә ЎЈ
ЎЈ
°ҙХХјёәОЧӘ»»№ШПөКҪ(9)Ј¬јЖЛгіц1ёцЦЬЖЪДЪёчВЦіЭіЭГжөДЎ°ұкёЛЙдПЯЎұЧФЧӘҪЗ¶ИЗшјдУ빫ЧӘҪЗ¶ИЗшјдЈ¬Изұн2ЛщКҫЎЈ
3) ¶ЛЗъГжіЭіЭГж№№ҪЁЎЈТФіЭГж5ОӘАэЈ¬Йи¶ЁіЭГж5ОӘДёЗъГжE0Ј¬ФЪЧФЧӘҪЗ¶ИЗшјд39.5Ўг~46ЎгДЪЈ¬И·¶ЁіцҙъұнөҘТ»ЧФЧӘҪЗ¶ИөДЎ°ұкёЛЙдПЯЎұДёПЯe1ЎЈПаУҰөШЈ¬ФЪ¶ЛЗъГжіЭөЧГжЙП№«ЧӘҪЗ¶ИЗшјд21.17Ўг~24.43ЎгДЪЈ¬И·¶ЁіцҙъұнөҘТ»№«ЧӘҪЗ¶ИөДЎ°ұкёЛЙдПЯЎұДёПЯe2ЎЈ
ұн1 НЦФІіЭВЦУл¶ЛЗъГжіЭЕМ»щұҫјёәОІОКэ
Table 1 Basic geometric parameters of elliptical gear and curved-face gear

ұн2 Ў°ұкёЛЙдПЯЎұҪЗ¶ИЗшјд
Table 2 Angle range of benchmarking ray

ДёЗъГжE0ЙПЎ°ұкёЛЙдПЯЎұДёПЯe1°ҙЧФЧӘ·ҪПт·ўіцЎ°ұкёЛЙдПЯЎұЈ¬РОіЙН¶У°ПЯ»гu1ЎЈН¶У°ПЯ»гu1ИЖz2Цб»ШЧӘЈ¬РОіЙЧФЧӘН¶У°ПЯ»гЗъГжЧйv1ЎЈ№ІйоЗъГж(¶ЛЗъГжіЭіЭГж) E1ЙПЎ°ұкёЛЙдПЯЎұДёПЯe2°ҙ№«ЧӘ·ҪПт·ўіцЎ°ұкёЛЙдПЯЎ°Ј¬РОіЙН¶У°ПЯ»гu2ЎЈН¶У°ПЯ»гu2СШz2ЦбАӯЙмЈ¬РОіЙ№«ЧӘН¶У°ПЯ»гЗъГжЧйv2ЎЈv1Улv2ЦРөДЗъГжТ»Т»¶ФУҰЈ¬БҪН¶У°ПЯ»гЗъГжЧйөДҪ»ПЯјҙОӘұ»·ҙЗуіцөД¶ЛЗъГжіЭҪШПЯЈ¬¶шЛщУРөД¶ЛЗъГжіЭҪШПЯұгГиКцБЛУліЭГж5Па№ІйоөД¶ЛЗъГжіЭіЭГж5ЎЈ
°ҙҙЛЗъГж№№ҪЁ№жВЙЈ¬ТАҫЭұн2КэҫЭЈ¬Ҫ«ЖдУаіЭГжҪшРРіЙРОІЩЧчЈ¬ҝЙөГіц1ёцЦЬЖЪДЪёчёц¶ЛЗъГжіЭөДіЭГжЈ¬ИзНј6ЛщКҫЎЈЛжә󣬶ФЗуөГөД1ёцЦЬЖЪөДіЭГжҪшРРҫөПсУлФІЦЬХуБРөИІЩЧчЈ¬јҙҝЙөГөҪНкХыөД¶ЛЗъГжіЭіЭГжЎЈ
Нј6 1ёцЦЬЖЪДЪ¶ЛЗъГжіЭөДіЭГж
Fig. 6 Curved-face gear tooth surface in one cycle
4) ¶ЛЗъГжіЭіЭЕМіЙРОЎЈЛщөГөД¶ЛЗъГжіЭіЭГжОӘҪУҙҘіЭГжЈ¬ТФёГҪУҙҘіЭГжОӘ·ЦёоГж¶ФіЭЕМГ«ЕЯҪшРР·ЦёоЈ¬өГөҪН№°јБҪ¶ЛіЭЕМЎЈФЪsolidworks»·ҫіПВөДҫЯМеІЩЧчОӘЈәФЪіЭЕМөЧ¶ЛГжЙП»жЦЖДЪНвИҰІЭНјЈ¬АӯЙмөҪҪУҙҘіЭГжөГТ»¶ЛіЭЕМЈ»ФЪБнТ»·ҪПтіЭЕМөЧ¶ЛГжЙП»жЦЖДЪНвИҰІЭНјЈ¬АӯЙмөҪҪУҙҘіЭГжөГБнТ»¶ЛіЭЕМЎЈЧоЦХөГіцөД¶ЛЗъГжіЭіЭЕМИзНј7ЛщКҫЎЈФЪҙ«өЭН¬СщЕӨҫШКұ(ұҫОДОӘ40 kNЎӨm)Ј¬АыУГANSYSИнјюөДworkbench°жҝйЈ¬Ҫ«¶ЛГжМЭРОіЭНтПтБӘЦбЖчУл¶ЛЗъГжМЭРОіЭНтПтБӘЦбЖчөД¶ЛіЭЕМҪшРРУРПЮФӘ¶ФұИ·ЦОцЈ¬ИзНј8ЛщКҫЎЈ
Нј7 ¶ЛЗъГжіЭБӘЦбЖч¶ЛіЭЕМ
Fig. 7 Curved-face gear tooth plate of coupling
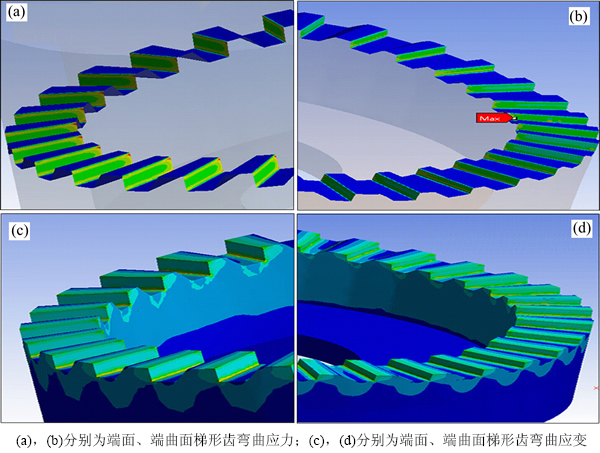
Нј8 БҪАаНтПтБӘЦбЖчіЭЕМANSYS¶ФұИ·ЦОц
Fig. 8 Two types of universal couplingЎҜs ANSYS analysis
4 ¶ЛЗъГжіЭНтПтБӘЦбЖчөДҪЁДЈУл·ЦОц
К®ЧЦЦбКҪНтПтБӘЦбЖчДЬ№г·әУҰУГУЪТұҪрЎўЖрЦШЎў№ӨіМФЛКдЎўҝуЙҪЎўКҜУНЎўҙ¬І°ЎўГәМҝЎўПрҪәЎўФмЦҪ»ъРөј°ЖдЛыЦШ»ъРРТөөД»ъРөЦбПөЦРҙ«өЭЧӘҫШ[15]ЎЈҪ«¶ЛЗъГжіЭёГБ¬ҪУ·ҪКҪУҰУГУЪНтПтБӘЦбЖчөД»°Ј¬Ҫ«ҙу·щ¶ИМбёЯЖдіРФШДЬБҰЎў¶ФЦРРФДЬәНҙ«¶ҜЧӘҫШЈ¬ІўДЬ№»УРР§ЛхРЎБӘЦбЖчМе»эЎЈПВГжУҰУГsolidworks¶ФёГ¶ЛЗъГжіЭНтПтБӘЦбЖчҪшРРИэО¬ҪЁДЈЙијЖЎЈ
ЙијЖУГУЪТұҪрөИ№ӨіМЙиұёөДК®ЧЦЦбКҪ¶ЛЗъГжіЭНтПтБӘЦбЖчЈ¬ҙ«өЭөДЧоҙуЕӨҫШОӘ40 kNЎӨmЈ¬ёщҫЭ¶ЛЗъГжіЭБӘЦбЖчјёәОІОКэөДЙијЖ·Ҫ·ЁЈ¬өГөҪёГБӘЦбЖчөДјёәОІОКэИзПВЈәІОҝјНвҫ¶ОӘ164.22 mmЈ¬ҪЪЗъПЯЦщГж°лҫ¶јЖЛгЦөОӘR=77.21 mmЈ¬ИЎНвҫ¶ОӘD=180 mmЈ¬ИЎ¶ЛЗъГжіЭДЈКэm=4Ј»іЭЕМҪЧКэn2=2Ј¬іЭКэz2=36Ј»И«іЭёЯh2=9 mmЈ»іЭ¶ҘёЯha2=4 mmЈ»іЭёщёЯhf2=5 mmЎЈФЪҙ«өЭН¬СщЕӨҫШ(40 kNЎӨm)КұЈ¬2АаНтПтБӘЦбЖчөДҪб№№ІОКэУлУРПЮФӘ¶ФұИҪб№ыИзұн3ЛщКҫЎЈ
ұн3 2АаНтПтБӘЦбЖч¶ФұИ
Table 3 Two types of universal coupling
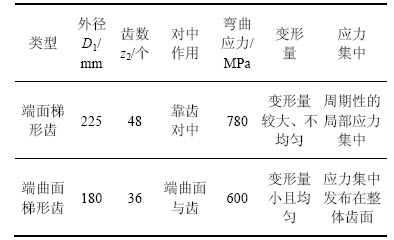
¶ЛЗъГжіЭНтПтБӘЦбЖчДЬ№»ТФёьРЎөДМе»эАҙіРКЬН¬СщөДЕӨҫШЈ¬УРАыУЪҪЪФјЙъІъіЙұҫЈ»¶ЛЗъГжіЭҙжФЪ¶юҙОіРФШТФј°¶юҙО¶ФЦРөДМШөгЈ¬Ҫш¶шМбёЯБЛФШәЙіРФШДЬБҰәН¶ФЦРРФДЬЈ¬Н¬КұҫЯУРБЛЧФ¶Ҝ¶ЁРДөДЧчУГЈ»ANSYS¶ФұИ·ЦОцөГіц¶ЛЗъГжМЭРОіЭөДіЭёщЗҝ¶ИПаұИУЪ¶ЛГжМЭРОіЭМбёЯБЛ20%Ј»¶ЛЗъГжМЭРОіЭөДұдРОБҝәНұдРОіМ¶ИПаұИУЪ¶ЛГжМЭРОіЭРЎ¶шҫщФИЈ»З°ХЯҙжФЪЦЬЖЪРФҫЦІҝУҰБҰјҜЦРЈ¬¶шәуХЯөДУҰБҰјҜЦР·ЦІјФЪХыМеіЭГжЎЈ
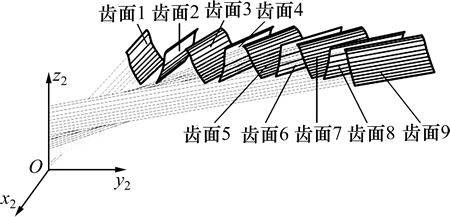
°ҙјЖЛгөГіцөДјёәОІОКэЈ¬АыУГsolidworksИнјю¶Ф¶ЛЗъГжіЭНтПтБӘЦбЖчҪшРРИэО¬ҪЁДЈЈ¬ИзНј9ЛщКҫЎЈ
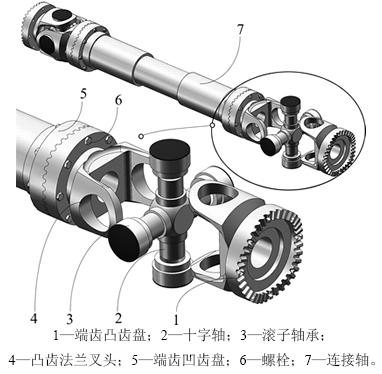
Нј9 ¶ЛЗъГжіЭНтПтБӘЦбЖч
Fig. 9 Curved-face gear universal coupling
5 ҪбВЫ
1) МбіцБЛ¶ЛЗъГжіЭБӘЦбЖчХвТ»РВөДҪб№№РОКҪЈ¬ҪЁБўБЛ¶ЛЗъГжіЭБӘЦбЖчЗуҪвөД№ІйоЧшұкПөЈ¬НЁ№эЗъГж№ІйоЗуҪв·Ҫ·ЁНЖөјіцБЛ¶ЛЗъГжіЭБӘЦбЖчөД¶ЛЗъГжІОКэ·ҪіМЈ¬ЙъіЙБЛ¶ЛЗъГжЈ¬К№өГВЦіЭ·ЦІјФЪ¶ЛЗъГжЙПіЙОӘҝЙДЬЎЈ
2) ҪбәП¶ЛЗъГжіЭБӘЦбЖчөДјёәОІОКэЙијЖАнВЫЈ¬ІЙУГЎ°№ІйоҪШПЯН¶У°·ЁЎұРВРНіЭГжЙъіЙ·Ҫ·ЁЈ¬НЁ№эsolidworksИнјю¶Ф¶ЛЗъГжіЭіЭГжҪшРРјёәОЗуҪвЈ¬»сөГБЛ¶ЛЗъГжіЭБӘЦбЖчөДБ¬ҪУіЭГжј°ИэО¬КөМеДЈРНЎЈ
3) ҝЙТФҪ«¶ЛЗъГжіЭБӘЦбЖчУҰУГУЪТұҪрөИ№ӨіМЙиұёЦРЈ¬СйЦӨБЛ¶ЛЗъГжіЭБӘЦбЖчјёәОЙијЖ·Ҫ·ЁөДХэИ·РФәНФЪ№ӨіМУҰУГЦРөДҝЙРРРФЎЈ
ІОҝјОДПЧЈә
[1] ұұҫ©іЭВЦі§. ёсАыЙӯЧ¶іЭВЦјјКхЧКБПТлОДјҜ(өЪ2·ЦІб)[M]. ұұҫ©: »ъРө№ӨТөіц°жЙз, 1983: 141-143.
Beijing Gear Works. Gleason bevel gear technical data (The second volume)[M]. Beijing: Mechanical Industry Press, 1983: 141-143.
[2] DEMIN A I. Calculation and design of curvic couplings[J]. Mach Tool, 1978, 49(1): 27-30.
[3] PISANI S R, RENCIS J J. Investigating CURVIC coupling behavior by utilizing two-and three-dimensional boundary and finite element methods[J]. Engineering Analysis with Boundary Elements, 2000, 24(3): 271-275.
[4] RICHARDSON I J, HYDE T M. Three-dimensional finite element investigation of the bolt stresses in an aero-engine curvic coupling under a blade release condition[J]. Journal of Aerospace Engineering, 2000, 214(4): 231-245.
[5] BRADLEY J N. Digital inspection of fixed curvic coupling contact pattern[D]. California: California Polytechnic State University, 2012: 23-30.
[6] НхИ«ПИ, Т¶Дюҫь, МАО°. БӘЦбЖч·ЁАј¶ЛГжіЭөДЙијЖј°УРПЮФӘ·ЦОц[J]. »ъРөЙијЖ, 2011, 28(11): 43-46.
WANG Quanxian, YE Ningjun, TANG Wei. Design and finite element analysis on the end surface teeth of coupling flange[J]. Journal of Machine Design, 2011, 28(11): 43-46.
[7] JB/T 3242ЎӘ1993, SWZРНХыМеЦбіРЧщК®ЧЦЦбКҪНтПтБӘЦбЖч[S].
JB/T 3242ЎӘ1993, SWZ The overall bearing cross shaft universal coupling[S].
[8] МЖҪшФӘ, АЧ¶ШІЖ, БхПт¶«, өИ. ЦұіЭ¶ЛіЭЕМЙијЖСРҫҝ[J]. »ъРөЙијЖ, 2013, 30(12): 6-11.
TANG Jinyuan, LEI Duncai, LIU Xiangdong, et al. Design study for straight end-toothed disc[J]. Journal of Machine Design, 2013, 30(12): 6-11.
[9] РӨАҙФӘ, БОөАСө, ТЧҙ«ФЖ. №ІйоЗъГжЗуҪвАнВЫУл·Ҫ·ЁСРҫҝ[J]. »ъРөҝЖС§УлјјКх, 2002, 21(3): 345-347.
XIAO Laiyuan, LIAO Daoxun, YI Chuanyun. An overview of the theory and method on the conjugate surface design[J]. Mechanical Science and Technology, 2002, 21(3): 345-347.
[10] е§Бј№у, јНГыёХ. »ъРөЙијЖ[M]. өЪ8°ж. ұұҫ©: ёЯөИҪМУэіц°жЙз, 2006: 343-356.
FU Lianggui, JI Minggang. Mechanical design[M]. 8th ed. Beijing: Higher Education Press, 2006: 343-356.
[11] №ЁәЈ. ХэҪ»·ЗФІГжіЭВЦёұөДҙ«¶ҜЙијЖУлМШРФ·ЦОц[D]. ЦШЗм: ЦШЗмҙуС§»ъРө№ӨіМС§Фә, 2012: 10-13.
GONG Hai. Transmission design and characteristic analysis of orthogonal non-circular face gear drive[D]. Chongqing: Chongqing University. College of Mechanical Engineering, 2012: 10-13.
[12] »ЖөЗәм, Фшиә. №М¶ЁКҪ¶ЛГж»ЎіЭБ¬ЦбҪЪөДЙијЖ[J]. »ъРөЙијЖУлСРҫҝ, 2013, 29(1): 31-34.
HUANG Denghong, ZENG Tao. Design method for fixed curvic coupling[J]. Machine Design & Research, 2013, 29(1): 31-34.
[13] ОвРтМГ, НхәЈ№у. ·ЗФІіЭВЦј°·ЗФИЛЩұИҙ«¶Ҝ[M]. ұұҫ©: »ъРө№ӨТөіц°жЙз, 1997: 34-40.
WU Xutang, WANG Haigui. Non-circular gear and non uniform than transmission[M]. Beijing: Mechanical Industry Press, 1997: 34-40.
[14] БЦі¬, АоЙҜЙҜ, №ЁәЈ. ХэҪ»ұдҙ«¶ҜұИГжіЭВЦөДЙијЖј°ИэО¬ФмРН[J]. әюДПҙуѧѧұЁ(ЧФИ»ҝЖС§°ж), 2014, 41(3): 49-55.
LIN Chao, LI Shasha, GONG Hai. Design and 3D Modeling of orthogonal variable transmission ratio face gear[J]. Journal of Hunan University (Natural Sciences), 2014, 41(3): 49-55.
[15] јЦҫҙЖҪ. ЦШФШК®ЧЦЦбКҪНтПтБӘЦбЖчөДФЛ¶Ҝ·ВХжј°Ҫб№№УЕ»Ҝ[D]. әП·К: әП·К№ӨТөҙуС§, 2013: 1-5.
JIA Jingping. Overloading the cross shaft universal coupling motion simulation and structure optimization[D]. Hefei: Hefei University of Technology, 2013: 1-5.
(ұајӯ іВ°®»Ә)
КХёеИХЖЪЈә2016-02-20Ј»РЮ»ШИХЖЪЈә2016-04-27
»щҪрПоДҝ(Foundation item)Јә№ъјТЧФИ»ҝЖС§»щҪрЧКЦъПоДҝ(51275537) (Project(51275537) supported by the National Natural Science Foundation of China)
НЁРЕЧчХЯЈәБЦі¬Ј¬ҪМКЪЈ¬І©КҝЙъөјКҰЈ¬ҙУКВҙ«¶ҜПөНіҙҙРВЙијЖАнВЫУл·Ҫ·ЁЎўіЭВЦҙ«¶ҜПөНіөДЙијЖЎў·ЦОцУлЦЖФмСРҫҝЈ»E-mail: linchao@cqu.edu.cn

