自适应模糊控制在船舶航向控制中的应用
聂海强,王锡淮,肖健梅
(上海海事大学 电气自动化系,上海,200135)
摘要:船舶航向控制器设计一直是船舶运动控制的重要研究课题之一,它与船舶航行的经济性、安全性和舒适性密切相关。由于船舶的动态具有大惯性、大时滞和非线性等特点,且受模型参数摄动以及船舶运动中风、浪、流等外界干扰的影响,使得控制器的设计成为一个复杂的问题。研究船舶航迹跟踪控制问题,采用自适应模糊控制方法,设计船舶航迹跟踪控制器。应用Matlab仿真工具以一条模型船为对象,对设计的控制器进行计算机仿真研究。仿真结果表明:船舶实际航迹能够跟踪期望航迹,达到满意的效果,验证所设计控制器的有效性。
关键词:非线性;船舶航迹跟踪控制;自适应模糊控制
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2011)S1-0985-06
Adaptive fuzzy control and its application for ship steering
NIE Hai-qiang, WANG Xi-huai, XIAO Jian-mei
(Department of Electrical and Automation, Shanghai Maritime University, Shanghai 200135, China)
Abstract: The design of ship course controller is one of the most important research topics of ship motion control, which is closely related to the economic, security and comfort of ship. Because of the high inertia, strong time lag and non-linearity characteristics, the model parameter perturbations, as well as the effects of wind, wave and current disturbances, designing a high performance ship course controller is always a very complex issue. The ship trajectory tracking control was investigated. The ship trajectory tracking control was designed by the adaptive fuzzy control method. Eventually, the simulation studies for a replica were carried out by utilizing Matlab toolbox. The simulation results are satisfied that the actual trajectory of the ship can track the desired one and the effectiveness of the controller is verified.
Key words: non-linearity; ship trajectory tracking control; adaptive fuzzy control
在20世纪90年代末,人们开始对船舶航迹控制的研究给予了极大的关注。至今,关于船舶航迹控 制[1]的理论研究已经取得一些研究成果。各种控制算法不断涌现,为航迹控制提供了充足的理论依据。Pacini等[2]采用LQG方法设计控制器使船舶航迹控制系统达到局部渐近稳定。马壮等[3]应用模糊和PID相结合的方法使船舶航迹控制系统达到半全局指数稳定的效果。张桂臣等[4]利用反传多层感知神经网络构建了MFA自动舵系统,使实际航迹逼近计划航线。上述方法大多采用线性模型,有些虽然采用非线性船模,但所取得的控制效果有一定的局限。船舶操纵是一个极为复杂的控制过程,由于船舶动态具有大惯性、时滞、非线性等特点,船在航行中又易受风、浪、流等环境因素的影响使得船舶航迹控制成为一个含有干扰项的非线性控制[5]问题。基于自适应模糊模型的船舶航迹跟踪控制器的设计,可以满足当今对船舶优化控制性能的要求。
本文作者由自适应模糊控制[6-7]的理论基础,利用船舶操纵的平面运动模型[8],采用模型参考自适应模糊控制方法,建立自适应模糊控制的操舵系统,对船舶操舵系统进行仿真研究。利用MATLAB工具[9],将模型参考自适应模糊控制运用于船舶操舵系统,观察航向及舵角输出曲线,分析系统的抗干扰性。仿真结果表明,船舶实际航迹能跟踪期望航迹,达到满意的控制效果,验证所设计控制器的有效性。
1 系统描述
1.1 自适应模糊控制操舵系统[10-11]
自适应模糊控制操舵系统框图[2]如图1所示。从图1可以看出:该控制系统由自适应模糊机构、舵机伺服系统、船舶、干扰和必要的传感器组成。
该操舵系统是将自适应机构通过模糊算法来实现。图1中:ψr为给定航向;ψ为实际航向,e(e=ψr-ψ),ec(ec=de/dt)和δc分别为航向误差、误差变化率和控制舵角;k1和k2为偏差及其变化率的量化因子。
1.2 船舶平面运动模型
船舶操纵运动数学模型[8]描述船舶在运动过程中对控制输入(舵角)的响应特性,了解和掌握船舶运动模型是对船舶进行仿真研究的基础。
船舶的实际运动异常复杂,在一般情况下具有6个自由度。在附体坐标系内考察,这种运动包括跟随3个附体坐标轴的移动及围绕3个附体坐标轴的转动,前者以前进速度u、横漂速度v、起伏速度w表述,后者以首摇角速度r、横摇角速度p及纵摇角速度q表述。在惯性坐标系内考察,船舶运动可以用它的3个空间位置x,y和z以及3个姿态角即首摇角ψ、横摇角φ、纵摇角θ来描述。
数学模型是实际系统的简化,太复杂和精细的模型可能包含难于估计的参数,也不便于分析。本文作者研究船舶航迹跟踪问题,所以可以忽略起伏运动、横摇运动及纵摇运动,而只需讨论前进运动、横漂运动和首摇运动,这样就简化成一种只有3个自由度的平面运动问题。船舶平面运动坐标系如图2所示。其中:O点为动坐标系原点,在船舶操纵性研究中,O点通常取在船中剖面处,Ox轴取为船纵轴,以指向船首为正;Oy轴与纵剖面垂直,以指向右弦为正;Oz轴垂直于水线面,以指向龙骨为正,这样就组成了一个固结在船体上的右手坐标系。
根据表达线性和角动量守恒定理,可以得到描述船舶在水平面的纵荡、横荡和艏摇运动的方程式:
式中:m为船舶的质量;XG为船舶重心的坐标;Iz为船体绕z轴的转动惯量;r为船舶旋转角速度;u和v分别表示沿Ox和Oy轴的线速度;X,Y和N为水动力和力矩。
对于一般船舶的操纵运动,考虑到操舵机构所能实施的操舵速度是有限的,且船舶本身的惯性很大,故对高频扰动反应很小,所以在操舵响应中,主要是低频运动。传递函数在低频下可降阶为一阶模型,其对应的频域方程为:

上式称为一阶响应模型,也称野本(Nomoto)方程,它既能抓住其响应特性本质,又比二阶方程更简化。
1.3 参考模型
在航向跟踪控制中,希望用期望航向ψr代替航向变化的设定参考信号ψ,一种简单的方法是应用模型参考技术。本文作者将采用参考模型:
式中:ωn和ξ是描述闭环系统行为的设计参数;ψ为设定航向变化的指令信号;ψr为期望航向的光滑参考轨迹。参考模型可视为对指令首向角的预滤波。预滤波可避免大的输入信号引起的数值解方面的困难。不管参考首向角ψ的幅值改变多大,参考模型的动态特性均与船舶动态相匹配。
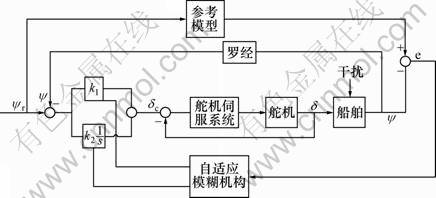
图1 自适应模糊控制操舵系统
Fig.1 Adaptive fuzzy control system
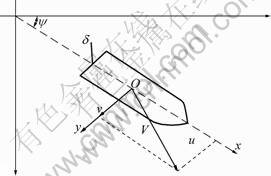
图2 船舶平面运动坐标系
Fig.2 Ship plane motion co-ordinate
1.4 舵机伺服系统
舵机伺服系统包含2个电动液压转向子系统:液压转动伺服操作系统和方向舵伺服执行器。舵机伺服系统的输入来源于自动驾驶仪,被称为控制方向偏向角(δc),输出是实际船舵角(δ)。
2 船舶航迹控制器设计
用模糊集理论设计的自适应机构[12],只要根据系统的模糊信息,用模糊条件语句写出控制规则,就能求出较合理的控制作用。此外,模糊算法比较简单,便于联机实时控制,提供了一种实现自适应控制的方法。
2.1 模型参考自适应模糊控制算法
模型参考自适应模糊控制是将自适应机构通过模糊算法来实现如图1所示。图中k1和k2为可调参数。设计模型参考自适应模糊控制器的关键在于设计模糊自适应机构其设计方法又与设计基本模糊控制器的方法完全相同。即首先将精确量模糊化,其次通过模糊运算,最后由模糊判决给出修正量。
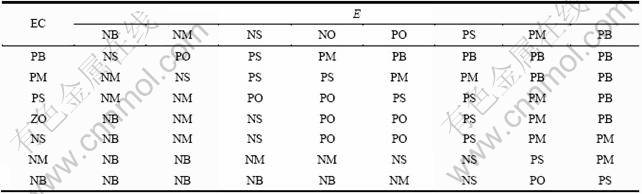
表1和2所列分别为操舵系统可调参数k1和k2的控制规则,根据偏差及偏差变化以及相应控制规则,经过模糊推理合成和模糊判决,完成参数k1和k2的自适应调整,从而实现系统的自适应。
表1 k1参数控制表
Table 1 Control parameter for k1
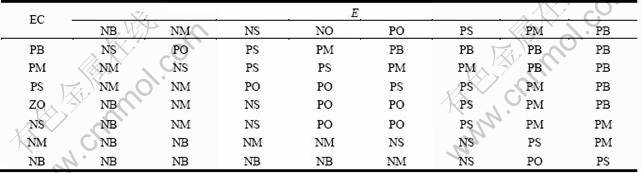
表2 k2参数控制表
Table 2 Control parameter for k2
2.2 输入输出语言变量及隶属度函数的设定
为方便起见,通过量化因子,将输入输出变量的论域统一为[-6,6]。
输入变量如下:
(1) 航向偏差:e=ψr-ψ。语言变量取值:负大(NB);负中(NM);负小(NS);负零(NO);正零(PO);正小(PS);正中(PM);正大(PB)。
(2) 航向偏差变化率:ec=de/dt,语言变量取值:负大(NB);负中(NM);负小(NS),零(ZO);正小(PS);正中(PM);正大(PB)。
输出变量为:k1和k2。语言变量取值:负大(NB);负中(NM);负小(NS);负零(NO);正零(PO);正小(PS);正中(PM);正大(PB)。
4个变量的隶属度函数均采用对称、均匀分布的三角形函数。输入输出变量的隶属函数曲线如图3所示。
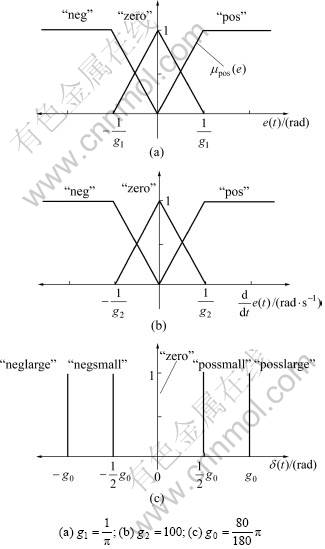
图3 输入输出变量的隶属函数曲线
Fig.3 Membership functions for inputs and output
2.3 模糊控制规则的设计
根据经验较为丰富的船舶驾驶人员,将操纵规则用语言总结出来,然后将为其转化模糊控制规则。表1和2所列分别为船舶操舵系统可调参数k1和k2的控制规则。
2.4 模糊推理及反模糊法
模糊推理采用Mamdani型算法,反模糊法采用重心法。
3 系统仿真
这里以中远集团集装箱船shanghai号实船数据进行仿真,用Matlab工具针对非线性船舶航迹跟踪控制系统,采用自适应模糊控制方法,进行仿真研究。船长350 m,船宽39.8 m,满载吃水15 m,这里设船速为5 m/s。则得到如图4~9所示的船舶航迹跟踪控制仿真结果。
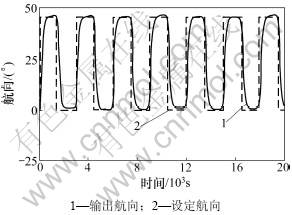
图4 输出航向历史曲线
Fig.4 Ship heading (sold) and desired ship heading (dashed)
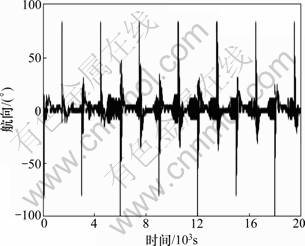
图5 输出舵角历史曲线
Fig.5 Rudder angle
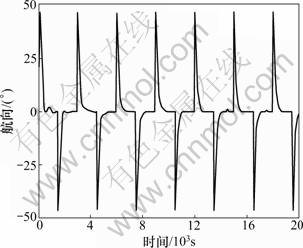
图6 输出航向与设定航向之差历史曲线
Fig.6 Ship heading error between ship heading and desired heading
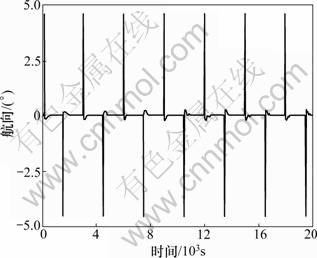
图7 偏差率
Fig.7 Change in ship heading error
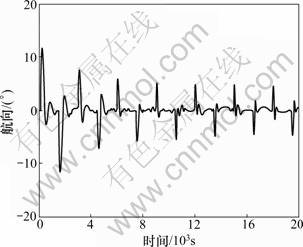
图8 输出航向与参考模型航向之差历史曲线
Fig.8 Ship heading error between ship heading and reference model heading
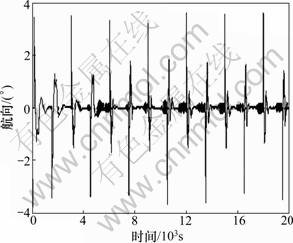
图9 偏差率(输出航向与参考模型航向之间)
Fig.9 Change in heading error between output and reference model
由图4和图5可以看出:该控制系统具有较好的控制性能,可以使实际输出航向(实线)可以渐进跟踪期望的航向参考轨迹(虚线),调节时间较短,施舵合理,符合操舵规律。由图6~9可以看出:跟踪误差较小,具有较强的适应性。
4 结论
本研究设计的自适应模糊控制船舶航向跟踪控制器,为船舶航向控制提供了一种有效的方法。仿真研究的结果表明,该系统具有较强的鲁棒性和良好的稳定性。
参考文献:
[1] Enab Y M. Intelligent controller design for the ship steering problem[J]. IEE Proc-Control Theory Application, 1996, 143(1): 17-24.
[2] Pacini P J, Kosko B. Adaptive fuzzy systems for target tracking[J]. Intelligent Systems Engineering, 1992, 1(1): 3-21.
[3] 马壮, 万德钧, 黄林. 一种新型模糊-PID控制航迹自动舵[J]. 舰船电子工程, 1999, 6: 21-25.
MA Zhuang, WAN De-jun, HUANG Lin. A new fuzzy-PID controller for ship navigation[J]. Ship Electronic Engineering, 1999, 6: 21-25.
[4] 张桂臣, 任光. 在线自整定PID船舶自动舵的设计与实现[J]. 中国造船, 2007, 48(30): 44-48.
ZHANG Gui-chen, REN Guang. Design and implementation of self-tuning PID marine automatic steering[J]. Ship Building of China, 2007, 48(30): 44-48.
[5] 胡跃明. 非线性控制系统理论与应用[M]. 北京: 国防工业出版社, 2002.
HU Yue-ming. Non-linear control system theory and application [M]. Beijing: National Defense Industry Press, 2002.
[6] 刘金琨. 智能控制[M]. 北京: 电子工业出版社, 2005.
LIU Jin-kun. Intelligent control[M]. Beijing: Electronic Industry Press, 2005.
[7] Astrom K J, Wittenmark B. Adaptive control[M]. New York, US: Addison-Wesley, 1995.
[8] 贾欣乐, 杨盐生. 船舶运动数学模型[M]. 大连: 大连海事大学出版社, 1998.
JIA Xin-le, YANG Yan-sheng. Ship motion mathematic model[M]. Dalian: Dalian Maritime University Press, 1998.
[9] 张国良. 模糊控制及其MATLAB应用[M]. 西安: 西安交通大学出版社, 2002.
ZHANG Guo-liang. Fuzzy control and Matlab application[M]. Xi’an: Xi’an Jiaotong University Press, 2002.
[10] 吴秀恒. 船舶操纵性与耐波性[M]. 北京: 人民交通出版社, 1999.
WU Xiu-hen. Ship maneuverability and seakeeping[M]. Beijing: China Communications Press, 1999.
[11] 程启明, 刘其明. 船舶自动舵控制技术发展研究[J]. 计算机自动测量与控制, 2000, 8(6): 2-4.
CHENG Qi-ming, LIU Qi-ming. The study on development of the control techniques on ship autopilot[J]. Computer Automated Measurement & Control, 2000, 8(6): 2-4.
[12] 诸静. 模糊控制原理及应用[M]. 北京: 机械工业出版, 1995.
ZHU Jing. Fuzzy control theory and application[M]. Beijing: Mechanical Industry Press, 1995.
(编辑 李艳红)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:上海海事大学科研基金资助项目(09-15)
通信作者:聂海强(1984-),男,山东淄博人,硕士研究生,从事船舶控制工程研究;电话:13621775863;E-mail: 916916618@163.com

