ёґєПРНі¬ЙщВнґпЧЭПтХс¶ЇЅЁДЈ
ТЧУЧЖЅ, ЦУ ѕт
(ЦРДПґуС§ »ъµз№¤іМС§Фє, єюДП і¤Йі, 410083)
ХЄТЄ: Хл¶ФІЙУГТ»О¬АнВЫДЈРНФЪСРѕїёґєПРНі¬ЙщВнґпХс¶ЇМШРФК±·ЦОцЅб№ыіцПЦОуІоµДЗйїц, ЙијЖТ»ЦЦРВРНЛ«¶ЁЧУёґєПРНі¬ЙщВнґп; АыУГВнґпµД¶ФіЖРФЅЁБўБЛ¶ЁЧУЧЭПтХс¶Ї·ЦОцОпАнДЈРН; Ѕ«¶ЁЧУЧЭПтУлєбПтХс¶ЇµД¶ЇДЬН¬К±ТэИлHamilton·ЅіМ, НЖµјБЛїјВЗВнґпєбПтХс¶ЇР§У¦µД¶ЁЧУЧЭПтХс¶Ї·ЦОцОў·Ц·ЅіМУл¶ЇБ¦±ЯЅзМхјю; ФЛУГMapleИнјю¶Ф¶ЁЧУФЛ¶ЇОў·Ц·ЅіМЅшРРЗуЅв, »сµГБЛ¶ЁЧУЧЭПтХс¶Ї№МУРЖµВК; ІЙУГУРПЮФЄДЈРНУлТ»О¬АнВЫДЈРН¶Ф¶ЁЧУµДЧЭПтХс¶Ї№МУРЖµВКЅшРР¶Ф±ИјЖЛг, Іў¶ФВнґпФРН»ъµД№МУРЖµВКЅшРРІв¶ЁЎЈ СРѕїЅб№ы±нГч: ЛщЅЁДЈРН±ИТ»О¬АнВЫДЈРНѕЯУРёьёЯµД·ЦОцѕ«¶И; ·ЦОцЅб№ыУлКµСйЦµј°УРПЮФЄјЖЛгЦµОЗєПЎЈ
№ШјьґК: і¬ЙщВнґп; С№µзМХґЙ; №МУРЖµВК; ЧЭПтХс¶Ї; єбПтХс¶Ї
ЦРНј·ЦАаєЕ:TM356 ОДПЧ±кК¶Вл:A ОДХВ±аєЕ: 1672-7207(2005)03-0452-06
Modeling of longitudinal vibration of hybrid ultrasonic motor
YI You-ping, ZHONG Jue
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: One-dimensional model will lead to analytical error when the vibration characters of hybrid ultrasonic motor are considered. A new type of hybrid ultrasonic motor with 2 stators was developed. Considering the symmetrical properties of this motor, a physical model for longitudinal vibration analysis of the stator was established. By introducing the kinetic energy of the vibrations in longitudinal and transversal directions into the Hamilton equation, the differential equation for longitudinal vibration analysis and the dynamical boundary conditions were deduced, in which the transversal vibration effect was considered. The Maple software was used to solve these differential equations and the eigenfrequency of longitudinal vibration for the stator was obtained. For the purpose of comparison with the refined theoretical model, a finite element model and a one-dimensional model were used to compute the eignefrequency of longitudinal vibration. Furthermore, the eignefrequency of this motor prototype was measured in the experiment. The research results show that the theoretical model proposed has much higher accuracy than one-dimensional model. The analytical results agree well with the experimental results and the calculted results obtained by the finite element method.
Key words: ultrasonic motor; piezoceramic; eigenfrequency; longitudinal vibration; transversal vibration
і¬ЙщВнґпКЗТ»ЦЦАыУГС№µзМХґЙµДДжС№µзР§У¦КµПЦ»ъµзДЬБїЧЄ»»µДРВРНВнґп, УЙУЪЛьѕЯУРµНЛЩґуЕ¤ѕШЎў ПмУ¦їмЎў їШЦЖМШРФєГЎў І»КЬґЕіЎУ°Пмј°ФЛ¶ЇЧјИ·µИУЕБјРФДЬ, ФЪєЅїХєЅМмЎў »ъЖчИЛЎў ОўРН»ъРµєНЧФ¶ЇїШЦЖµИБмУтѕЯУР№гА«µДУ¦УГЗ°ѕ°[1-3]ЎЈ
ёґєПРНі¬ЙщВнґпКЗТ»ёцЧЭЎўЕ¤ёґєПАКЦ®НтХс¶ЇПµНі, УЙЧЭПтУлЗРПтС№µзМХґЙ(PZT)ХсЧУЧйіЙ, 2ёцХсЧУФЪ¶ЁЧУЦР·Ц±рј¤·ў2ёцХэЅ»µДХс¶ЇДЈМ¬, ЖдЦРЗРПтPZTХсЧУК№¶ЁЧУІъЙъЕ¤ЧЄХс¶ЇДЈМ¬, НЁ№э¶ЁЎў ЧЄЧУјдµДД¦ІББ¦Зэ¶ЇЧЄЧУФЛ¶Ї; ЧЭПтPZTХсЧУІъЙъЦбПтХс¶ЇДЈМ¬, їШЦЖ¶ЁЎў ЧЄЧУјдµДД¦ІББ¦, Ѕ«Л«ПтЕ¤ЧЄХс¶ЇЧЄ»»ОЄЧЄЧУµДµҐПтФЛ¶Ї[4,5]ЎЈ УЙУЪёґєПРНі¬ЙщВнґп±ИРРІЁРНі¬ЙщВнґпѕЯУРёьґуµДКдіцБ¦ѕШєНёьєГµДµНЛЩОИ¶ЁРФ, ЧФ·ўГчТФАґФЪі¬ЙщВнґпСРѕїБмУтКЬµЅ№ъДЪНвС§ХЯµДЖХ±й№ШЧў[6-13]ЎЈ И»¶ш, ёґєПРНі¬ЙщВнґпЦ»УР10¶аДкµД·ўХ№АъК·, ВнґпЙијЖАнВЫМеПµ»№І»НкЙЖ, ДїЗ°ЅЁБўµДЧЭПтХс¶Ї·ЦОцДЈРН¶ј»щУЪТ»О¬АнВЫ, ВнґпЅШГжµДєбПт±дРО±»єцВФ[14-18]ЎЈ КВКµЙП, ёґєПРНі¬ЙщВнґпТСІ»ФЩЦ»КЗПёі¤ёЛ, І»·ыєПТ»О¬АнВЫµДККУГМхјю, ТтґЛ, ёґєПРНі¬ЙщВнґпЧЭПтХс¶Ї·ЦОцАнВЫДЈРНЙРґэЅшТ»ІЅСРѕїЎЈ ОЄґЛ, ЧчХЯЙијЖБЛТ»ЦЦЛ«¶ЁЧУёґєПРНі¬ЙщВнґп, Ж乤ЧчФАнУлS.UehaµИЙијЖµДµҐ¶ЁЧУёґєПРНі¬ЙщВнґпПаЛЖ[2], І»Н¬µДКЗЧчХЯМбіцµДёґєПРНВнґпє¬УР2ёц¶ЁЧУ, ЗТФЪ¶ЁЧУЙПЙијЖБЛ2ёцЦ§іЕ»·ЎЈ Хл¶ФІЙУГТ»О¬АнВЫДЈРН·ЦОцёґєПРНі¬ЙщВнґпЧЭПтХс¶ЇЦРґжФЪµДОКМв, АыУГВнґпµД¶ФіЖРФЅЁБў¶ЁЧУЧЭПтХс¶Ї·ЦОцµДОпАнДЈРН; ёщѕЭHamiltonФАнНЖµјїјВЗВнґпєбПтХс¶ЇР§У¦µД¶ЁЧУЧЭПтХс¶Ї·ЦОцµДОў·Ц·ЅіМУл¶ЇБ¦±ЯЅзМхјю; ІЙУГУРПЮФЄДЈРНУлТ»О¬АнВЫДЈРН¶Ф¶ЁЧУµД№МУРЖµВКЅшРРјЖЛг, Іў¶ФВнґпФРН»ъµД№МУРЖµВКЅшРРІвКФЎЈ
1 ЧЭПтХс¶ЇОпАнДЈРНУлІДБП±ѕ№№·ЅіМ
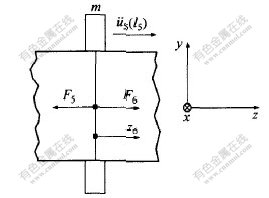
Л«¶ЁЧУёґєПРНі¬ЙщВнґпОЄ¶ФіЖЅб№№, ЧЄЧУµДєс¶ИЅП±Ў, ¶ЁЧУЧЭПтХс¶ЇОпАнДЈРНµД±ЯЅзїЙКУОЄТ»¶Л№М¶ЁЎў Т»¶ЛЧФУЙЎЈ УЙУЪ¶ЁЧУЦРј¤·ўµДЧЭЎў Е¤Хс¶ЇП໥Ѕвсо, ЧЭПтХс¶ЇОпАнДЈРНїЙУГНј1±нКѕЎЈЖдЦР,uiОЄѕЦІїЧш±кzi·ЅПтµДО»ТЖЎЈ
УЙПЯРФС№µзАнВЫїЙЦЄ, ТФУ¦±дSєНµзіЎЗї¶ИEОЄЧФ±дБїµДЧЭПтХс¶ЇРНPZTІДБПµД±ѕ№№·ЅіМОЄ:
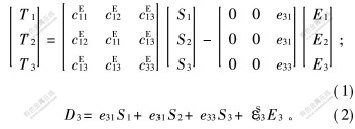
ЖдЦР: TiОЄУ¦Б¦·ЦБї; SiОЄУ¦±д·ЦБї; DiОЄµзО»ТЖ·ЦБї; cEijОЄєг¶ЁµзіЎПВµДµЇРФіЈКэ; eijОЄС№µзУ¦Б¦іЈКэ; ¦ЕSijОЄєг¶ЁУ¦±дПВµДЅйµзіЈКэЎЈ
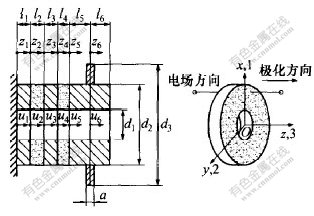
Нј 1 ¶ЁЧУЧЭПтХс¶Ї·ЦОцОпАнДЈРН
Fig. 1 Physical analysis model of longitudinal
vibration of stator
єцВФѕ¶ПтУ¦Б¦, јґT1=T2=0, ФтКЅ(1)єН(2)±дОЄ:
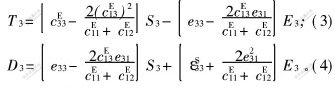
ЅшТ»ІЅјт»ЇµГµЅЧЭПтХс¶ЇРНPZTІДБПµД±ѕ№№·ЅіМОЄ:

ФЪ·ЦОцЧЭПтХс¶ЇК±, єс¶ИЗР±дХс¶ЇРНPZTСШЦбПтµДУ¦Б¦ОЄ:

¶ФУЪєс¶ИЗР±дХс¶ЇРНPZT, Н¬СщјЩЙиT2=T3=0, µГµЅПВБР№ШПµКЅ:
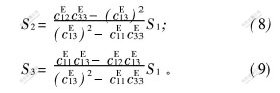
Ѕ«·ЅіМ(8)єН(9)ґъИл·ЅіМ(7)µГ:

ЖдЦР: Y4ОЄєс¶ИЗР±дХс¶ЇРНPZTµДµЇРФДЈБїЎЈ
2 ЧЭПтХс¶Ї·ЦОцАнВЫДЈРН
2.1 ЧЭПтХс¶ЇОў·Ц·ЅіМµДНЁЅвРОКЅ
ёщѕЭЧЭПтХс¶Ї·ЦОцОпАнДЈРН(Нј1), Hamilton·ЅіМѕЯУРТФПВРОКЅ:

ЖдЦР: [AKT^]iОЄПµНіµД¶ЇДЬ; [AKH^]iОЄПµНіµДмК; ¦ДWiОЄНвЅз¶ФПµНіЧцµДР鹦ЎЈ
Т»О¬АнВЫЦ»їјВЗБЛІДБПµДЦбПт±дРО, µ±¶ЁЧУєбЅШГжЅПґуК±, ОЄ»сµГѕ«И·µДХс¶Ї·ЦОцАнВЫДЈРН, У¦їјВЗЖдѕ¶Пт±дРОЎЈ УЙНј1ЛщКѕµДЧш±кПµїЙЦЄ, ¶ЁЧУДЪИОТвТ»µгµДЛЩ¶ИКёБїїЙ±нКѕОЄ:

ЖдЦР: u±нКѕО»ТЖ; (ЁB)±нКѕ¶ФК±јдЗуµјЎЈ
ИфS1=S2, ФтПµНіµД¶ЇДЬ±нґпКЅОЄ:
ЖдЦР: IpОЄј«№ЯРФѕШ; AОЄ¶ЁЧУєбЅШГж»э; ¦С<sub>LiОЄ¶ЁЧУІДБПµДЦКБїГЬ¶ИЎЈ ТэИл»ШЧЄ°лѕ¶ip,ѕЭIp=i2pA, ·ЅіМ(13)їЙЅшТ»ІЅјт»ЇОЄ:
ёщѕЭІДБП±ѕ№№·ЅіМ(1), (2)ТФј°ЧЭПтХс¶Ї·ЦОцОпАнДЈРН, їјВЗВнґпєбПт±дРОР§У¦µДПµНі¶ЇДЬ№ШПµКЅИзПВЎЈ
¶ФЧЭПтХс¶ЇРНPZT,УР:

¶ФЖдЛыІДБП,УР:
ЖдЦР: ¦ФiОЄІґЛЙ±И; (Ўд)±нКѕ¶ФЧш±кµДЖ«µјКэЎЈ
ЧЭПтХс¶ЇРНPZTµДмКОЄ:

Ѕ«ІДБП±ѕ№№·ЅіМ(3)ј°(4)ґъИлКЅ(17), µГ:

µЇРФІДБПУлЕ¤ХсРНPZTµДмКОЄ:

ФЪ¶МВ·МхјюПВ, НвЅз¶ФПµНіЛщЧцµДР鹦¦ДWi=0ЎЈ
Ѕ«ДЬБї·ЅіМ(15), (16), (18)ј°(19)ґъИлHamilton·ЅіМ(11)ІўХыАнµГ:

ёщѕЭ·ЅіМ(20),їЙµГµЅ¶ЁЧУЧЭПтХс¶ЇОў·Ц·ЅіМОЄ:
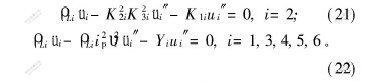
ФЪРіІЁј¤АшПВ, їЙТэИл·ЦАл±дБїРОКЅ:u(z,t)=U(z)Ў¤ej¦ёt,E3(z,t)=E3(z)Ў¤ej¦ёt,¦Х(t)=¦ХЎ¤ej¦ёt,D3(t)=D3Ў¤ej¦ёt,ґъИл·ЅіМ(21)єН(22)µГ:

¦ёОЄЅЗЖµВКЎЈ
·ЅіМ(23)µДНЁЅвРОКЅОЄ:

ЖдЦР: C1iєНC2iОЄґэ¶Ё»э·ЦіЈКэ, УЙВнґпµД±ЯЅзМхјюєНБ¬РшРФМхјюИ·¶ЁЎЈ
2.2 ±ЯЅзМхјю
УЙ¶ЁЧУХс¶Ї·ЦОцОпАнДЈРНїЙЦЄ, ВнґпЧЭПтХс¶Ї±ЯЅзМхјюОЄТ»¶Л№М¶ЁЎў Т»¶ЛЧФУЙ, ТтґЛ,ґжФЪТФПВ№ШПµКЅ:
U1(0)=0;(25)
U6Ўд(l6)=0ЎЈ(26)
ёщѕЭБ¬РшРФМхјю, ФЪЅШГжz1=l1, z2=l2, z3=l3, z4=l4єНz5=l5ґ¦, О»ТЖВъЧгПВБР·ЅіМ:
Ui(li)=Ui+1(0), i=1,Ў,5ЎЈ(27)
ФЪЅШГжz5=l5ґ¦, УЙУЪФцјУБЛµчХы»·, ёЅјУµДЦКБїmЅ«К№ёГЅШГжСШЦбПтµДКЬБ¦F·ўЙъ±д»Ї, »·µДїн¶ИФЪ·ЦОцЦР±»єцВФ, їґЧчјЇЦРЦКБїЎЈ ЖдКЬБ¦·ЦОцИзНј2ЛщКѕЎЈ
Нј 2 ЅШГжz5=l5µД¶ЇБ¦±ЯЅзМхјю
Fig. 2 Dynamical boundary condition on
cross section z5=l5
УЙЕЈ¶Щ¶ЁВЙїЙµГЅШГжz5=l5ґ¦µД¶ЇБ¦Б¬РшМхјюОЄ:
Y5AU5Ўд(l5)-Y6AU6Ўд(0)=m¦ё2U5(l5)ЎЈ(28)
УЙ·ЅіМ(20)µГµЅИзПВ¶ЁЧУёчЅШГжµД¶ЇБ¦Б¬РшМхјюЎЈ
a. ФЪЗшУт1єН2µДБ¬ЅУґ¦:
b. ФЪЗшУт3єН4µДБ¬ЅУґ¦:
c. ФЪЗшУт4єН5µДБ¬ЅУґ¦:
(YM-¦СM¦ё2i2p¦Ф2M)U3Ўд(l3)=(Y4-¦С4¦ё2i2p¦Ф24)U4Ўд(0);(31)
d. ФЪЗшУт4єН5µДБ¬ЅУґ¦:
(YM-¦СM¦ё2i2p¦Ф2M)U5Ўд(0)=(Y4-¦С4¦ё2i2p¦Ф24)U4Ўд(l4)ЎЈ(32)
ЖдЦР:YM±нКѕµЇРФІДБПµДµЇРФДЈБї; ¦ФMОЄµЇРФІДБПµДІґЛЙ±И; ¦СMОЄµЇРФІДБПµДЦКБїГЬ¶ИЎЈ
·ЅіМ(24)УР12ёц»э·ЦіЈКэ, їЙНЁ№э12ёц±ЯЅзМхјю·ЅіМ(25), (26), (27)(є¬5ёц±ЯЅзМхјю·ЅіМ), (28), (29), (30), (31)єН(32)ЗуЅвЎЈ
3 ЧЭПтХс¶Ї№МУРЖµВК·ЦОц
Ѕ«ЙПКцЧЭПтХс¶ЇОў·Ц·ЅіМНЁЅвґъИлБ¬РшРФМхјюУл¶ЇБ¦±ЯЅзМхјю, їЙµГµЅЧЭПтХс¶ЇОў·Ц·ЅіМЧйµД±нґпРОКЅ:
AC=rЎЈ(33)
ЖдЦР: AОЄПµКэѕШХу; CОЄ»э·ЦіЈКэѕШХу; C=(C11, C12, C21, C22, Ў, C61, C62); rОЄНвБ¦ѕШХуЎЈ
·ЅіМ(33)ѕЯУР·ЗБгЅвµД±ШТЄМхјюОЄ:
det(A)=0ЎЈ(34)
·ЅіМ(34)јґОЄЧЭПтХс¶ЇЖµВК·ЅіМ, НЁ№эёГ·ЅіМїЙТФ¶ФЛ«¶ЁЧУёґєПРНВнґпЅшРРХс¶Ї·ЦОцУлЅб№№ІОКэУЕ»ЇЎЈ Ѕ«¶ЁЧУµДІДБПІОКэ(±н1)ґъИлЧЭПтХс¶ЇЖµВК·ЅіМ, АыУГMapleИнјюЗуЅвёГѕШХу·ЅіМЎЈ
ОЄСйЦ¤ЧЭПтХс¶ЇДЈРНµДѕ«И·¶И, ·Ц±рІЙУГТ»О¬АнВЫДЈРНЎў УРПЮФЄДЈРН¶Ф¶ЁЧУЧЭПтХс¶ЇЅшРРАнВЫјЖЛг,Н¬К±¶ФВнґпСщ»ъЅшРРКµСйСРѕї, Ів¶ЁБЛ¶ЁЧУµДЧЭПтХс¶ЇЖµВКЎЈ Жд¶Ф±И·ЦОцЅб№ыИзНј3ЛщКѕЎЈ
ІЙУГ±ѕОДµДѕ«И·ДЈРНјЖЛгµГµЅµДµЪТ»ЅЧ№МУРЖµВКОЄ20.5 kHz, КµСйІвКФЦµОЄ19.48 kHz, УРПЮФЄјЖЛгЦµОЄ20.75 kHz, Т»О¬АнВЫДЈРНµДјЖЛгЅб№ыОЄ22.8kHzЎЈ ПФИ», ФЪЅЁДЈ№эіМЦР,УЙУЪїјВЗБЛ¶ЁЧУµДєбПт±дРО,ДЈРНјЖЛгЦµУлКµјКЅб№ыёьОЄЅУЅьЎЈ ±ѕОДЅЁБўµД¶ЁЧУЧЭПтХс¶Ї·ЦОцАнВЫДЈРНµДѕ«¶ИёЯУЪТ»О¬АнВЫДЈРН, Жд·ЦОцЅб№ыУлКµСйКэѕЭТФј°УРПЮФЄЅб№ыОЗєПЎЈ
±н 1 ВнґпІДБПІОКэ
Table 1 Material parameters of motor

![]()
1ЎЄКµСйЅб№ы; 2ЎЄѕ«И·ДЈРНЅб№ы;
3ЎЄУРПЮФЄДЈРНЅб№ы; 4ЎЄТ»О¬АнВЫДЈРНЅб№ы
Нј 3 ЧЭПтХс¶ЇТ»ЅЧ№МУРЖµВКАнВЫ·ЦОцЅб№ы
УлКµСйЅб№ы
Fig. 3 Analysis and experiment results for the
first order eigenfrequency of longitudinal vibration
4 Ѕб ВЫ
a. АыУГЛщМбіцµДёґєПРНі¬ЙщВнґпµД¶ФіЖРФТФј°ЧЭЎў Е¤Хс¶ЇЅвсоµДМШµг, ЅЁБўБЛ¶ЁЧУЧЭПтХс¶Ї·ЦОцОпАнДЈРНУл±ЯЅзМхјюЎЈ
b. Ѕ«¶ЁЧУЧЭПтУлєбПтХс¶ЇµД¶ЇДЬН¬К±ТэИлHamilton·ЅіМ, НЖµјБЛїјВЗВнґпєбПтХс¶ЇР§У¦µД¶ЁЧУЧЭПтХс¶Ї·ЦОцАнВЫДЈРН, ФЛУГMapleИнјю¶Ф¶ЁЧУХс¶Ї·ЦОцАнВЫДЈРНЅшРРЗуЅвЎЈ
c. ЛщЅЁБўµДАнВЫДЈРН±ИТ»О¬АнВЫДЈРНѕЯУРёьёЯµД·ЦОцѕ«¶И, ·ЦОцЅб№ыУлКµСйЦµј°УРПЮФЄјЖЛгЦµОЗєПЎЈ
ІОїјОДПЧ:
[1]Sashida T, Kenjo T. An introduction to ultrasonic motors[M]. Oxford: Clarendon Press, 1993.
[2]Ueha S, Tomikawa Y. Ultrasonic motorsЎЄЎЄtheory and applications[M]. Oxford: Clarendon Press, 1993.
[3]Wallaschek J. Piezoelectric ultrasonic motors[J]. Journal of Intelligent Material Systems and Structures, 1995,6(1): 71-83.
[4]Nakamura K, Kurosawa M, Ueha S. Design of a hybrid transducer type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1993, 40(4): 395-401.
[5]Nakamura K, Kurosawa M, Ueha S. Characteristics of a hybrid transducer-type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1991, 38(3): 188-193.
[6]ЛпєПГч, №щ»Ф. ЧЭЕ¤ёґєПРНі¬Йщµз»ъФ¤С№Б¦єНКдіцЕ¤ѕШµД№ШПµ[J]. Д¦ІБѧѧ±Ё, 2001, 21(1): 51-54.
SUN He-min, GUO Hui. The relation of pre-pressure and output-torque of longitudinal and torsional ultrasonic motor[J]. Tribology, 2001, 21(1): 51-54.
[7]Satonobu J, Friend J, Nakamura K, et al. Numerical analysis of the symmetric hybrid transducer ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferro-electrics and Frequency Control, 2001, 48(6): 1625-1631.
[8]Kurosawa M, Ueha S. Hybrid transducer type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferro-electrics and Frequency Control, 1991,38(3): 89-92.
[9]Tomikawa K, Adachi M, Aoyagi T, et al. Some constructions and characteristics of rod type piezoelectric ultrasonic motors using longitudinal and torsional vibrations[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1992, 39(5): 600-608.
[10]Aoyagi M, Tomikawa Y. Improvement in performance of longitudinal and torsional vibrator combination-type ultrasonic motor[J]. Jpn J Appl Phys, 1999, 38(5B): 3342-3346.
[11]Takahashi S. Multilayer piezoelectric ceramic actuators and their applications[J]. Jpn J Appl Phys, 1985, 24(2): 41-45.
[12]БЦКйУс.јРРДКЅС№µзі¬ЙщЕ¤ЧЄ»»ДЬЖчµДЙијЖ[J].С№µзУлЙщ№в,1994,16(1):24-28.
LIN Shu-yu. Design of piezoelectric ceramic ultrasonic trosional sandwich transducers[J]. Piezoelectrics & Acoustooptics, 1994,16(1):24-28.
[13]№щєЈСµ,ОєСа¶Ё,№щјЄ·б,µИ.ЧЭЕ¤ёґєПРНі¬ЙщІЁµз»ъС№µзХсЧУµДЙијЖ[J].С№µзУлЙщ№в,2000,22(5):341-344.
GUO Hai-xun, WEI Yan-ding, GUO Ji-feng, et al. The devign of the piezoelectric vibrator of the congitudinal-torsional composite USM[J]. Piezoelectrics & Acoustooptics, 2000, 22(5): 341-344.
[14]Aoyagi M, Tsuchiya S, Murasawa Y. Trial production of an ultrasonic motor using longitudinal and torsional vibrations of a rod vibrator driven by piezo-ceramic plates inserted in its axial direction[J]. Jpn J Appl Phys, 1997, 36(9B): 6106-6109.
[15]Ф¬КАГч, ЅЄїЄАы, ЗъЅЁїЎ,µИ. »щУЪЕ¤ЧЭёґєПРНі¬Йщµз»ъ¶ЇБ¦С§ДЈРНµДДЈДвјЖЛг[J]. С№µзУлЙщ№в, 2002, 24(4): 318-322.
YUAN Shi-ming, JIANG Kai-li, QU Jian-jun, et al. A dynamic model of longitudinal and torsional hybrid type ultrasonic motor[J]. Piezoelectrics and Acoustooptics, 2002, 24(2): 318-322.
[16]РмРс, БєСЮґє, К±РЎ»ў. ЧЭЕ¤Хс¶Їі¬ЙщВнґпµДБ¦С§ДЈРН[J]. Йщѧѧ±Ё, 2003, 28(3): 223-228.
XU Xu, LIANG Yan-chun, SHI Xiao-hu. Mechanical modeling of a longitudinally vibration ultrasonic motor[J]. Acta Acustica, 2003, 28(3):223-228.
[17]Aoyagi M, Tomikawa Y, Takano T. Simplified equivalent circuit of an ultrasonic motor and its applications[J]. Ultrasonics, 1996, 34(4): 275-278.
[18]LIN Shu-yu. Study on the sandwiched piezoelectric ultrasonic torsional transducer[J]. Ultrasonics, 1994, 32(6): 461-464.
КХёеИХЖЪ:2005 -03 -28
»щЅрПоДї:№ъјТЧФИ»їЖС§»щЅрЦШґуПоДї(50390064); №ъјТЎ°973Ў±јЖ»®ПоДї(2003CB716202)
ЧчХЯјтЅй:ТЧУЧЖЅ(1966-), ДР, єюДППжМ¶ИЛ, І©Кї, ё±СРѕїФ±, ґУКВі¬Йщ»»ДЬЖчУлОўµзЧУ·вЧ°µИСРѕї
ВЫОДБЄПµИЛ: ТЧУЧЖЅ, ДР, І©Кї; µз»°: 0731-8836499(O); E-mail: yyp@mail.csu.edu.cn

