DOI: 10.11817/j.issn.1672-7207.2019.04.014
基于新型双功率流差速转向机构的履带车辆转向性能
石志标1,刘江1,高峰2,曾文2
(1. 东北电力大学 机械工程学院,吉林 吉林,132000;
2. 北京航空航天大学 交通科学与工程学院,北京,100191)
摘要:转向机构直接影响履带车辆的转向性能。传统机械式双功率流差速转向机构只能实现数目有限的转向半径,并且往往需要制动器等元件,为此,设计一种具有连续转向半径且可避免磨损的新型机械式双功率流差速转向机构;建立差速转向机构的两电机轴(输入)转速与两半轴(输出)转速的运动学模型。根据两半轴转速与履带车转向半径之间的关系,得到履带车的两电机轴(输入)转速与转向半径的运动学模型;建立考虑履带宽度以及滑转、滑移的履带车稳态转向数学模型;最后进行运动仿真和理论分析对比研究。研究结果表明:对差速转向机构的转速仿真结果与理论值相对误差最大为1.50%,且能够使履带车辆实现任意的连续转向半径,该研究成果能为履带车辆的电机选取、转向控制以及结构优化等提供理论参考。
关键词:差速转向机构;行星机构;履带车辆;运动学模型;动力学模型
中图分类号:TH113 文献标志码:A 文章编号:1672-7207(2019)04-0864-09
Steering performance of tracked vehicle based on mechanical differential steering mechanism with twin driving
SHI Zhibiao1, LIU Jiang1, GAO Feng2, ZENG Wen2
(1. School of Mechanical Engineering, Northeast Electric Power University, Jilin 132000, China;
2. School of Transportation Science and Engineering,
Beijing University of Aeronautics and Astronautics, Beijing 100191, China)
Abstract: Steering mechanism directly affects steering performance of tracked vehicles. Because the traditional differential steering mechanism with twin driving can only realize a limited number of steering radius and often requires the sliding grinding of brake and other components. A new type of differential steering mechanism with twin driving with continuous steering radius and avoiding wear was designed, and kinematic model differential steering mechanism of the two motor shafts(input) and the rotational speed with two shaft(output) between was established. According to relationship between the tracked vehicles steering radius and two shafts speed, kinematic model between the two motor shafts of the tracked vehicles (input) speed and the steering radius were obtained. Finally, a comprarative study of motion simulation and theoretical was analyzed. The steady steering model of tracked vehicle considering width, skids and slips was established. The results show that the maximum relative error of rotation speed between the simulation results and the theoretical values is 1.50%, and the tracked vehicle can achieve continuous steering radius, which can provide theoretical basis for the steering control of the tracked vehicles and the structural optimization of the differential steering mechanism.
Key words: differential steering mechanism; planetary mechanism; tracked vehicle; kinematic model; kinetic model
履带车辆的转向性能作为整车性能评价的重要方面,不仅直接反映履带车辆转向行驶的机动性、准确性,而且影响着履带车辆的动力性、稳定性和作业效率[1-2]。行驶转向性能作为履带车机动性的一个重要标志已经引起学者们的广泛关注,如:熊光明等[3]在研究履带车辆接地段运动的基础上建立基于瞬时转向中心的履带车辆运动学模型;王红岩等[4]研究集中载荷条件下履带车辆稳态转向性能,分析各转向参数的测试及获取方法;芮强等[5]根据履带车辆转向运动学、动力学参数之间的相互关系,全面地分析各转向参数的测试及获取方法;董超等[6]建立综合考虑离心力和履带滑移(/滑转)等影响因素下的履带车转向数学模型。车辆转向性能影响因素较多,不仅与转向操纵输入、地面性质、行驶速度等因素有关,而且受所装备的转向机构影响[7-11]。但是,现在针对履带车转向性能的研究大多不考虑具体的转向机构,因此,采用考虑转向机构的行驶转向性能来研究履带车行驶转向性能比传统方法更具有现实意义。目前,转向系统大致经历了转向离合器-制动器、机械式双功率流转向系统和液压机械双功率流差速转向系统等阶段。离合器-制动器需要依靠摩擦元件之间的摩擦来实现,难以得到准确稳定的转向半径,且存在传动效率低、工作可靠性差、寿命低、转向半径数目有限等缺点[12]。机械式双功率流转向系统在转向性能上较单功率流转向机构有很大提高,但是,其转向半径仍然是有级的;转向机构整体结构分散、复杂且质量比较大;也不能排除靠部分摩擦元件进行滑磨转向及由滑磨所带来的一系列问题[13]。虽然液压机械式双功率流差速转向系统与前两种转向系统相比,有无穷多个转向半径,大幅度提高车辆的行驶机动性和灵活性,但是,其存在结构复杂、成本高、效率低等缺点[2]。为了解决上述问题,设计一种能实现连续转向半径的机械式双功率流差速转向机构。该转向机构是复合定轴轮系和行星轮系传动的一种新型差速转向机构,具有的差速器能使车辆行驶过程中驱动轮实现纯滚动运动。该转向机构整体结构简单且集中、传动效率高、可以实现高速转向、高稳定性直线行驶,不仅可采用多种驱动形式(包括电机和发动机等驱动),而且适用于轮式或履带式全地形军民用车辆和各种特殊装备移动平台的行走装置,如拖拉机、坦克和沙漠车等。本文以电机驱动为例,结合双功率流差速转向机构特点对四轮驱动的小型履带车转向性能进行研究。
1 差速转向机构设计
图1所示为所设计的双功率流差速转向机构,它由2排行星齿轮、差速器、差速转向机构壳体以及左、右输出半轴组成。它们之间的配合关系是:差速器壳为太阳轮与行星排1的行星齿轮啮合;差速器右半轴上的太阳轮和行星排2的行星齿轮啮合;与行星排1啮合的齿圈外端与转向驱动电机输入的圆柱齿轮啮合;行星排1的行星架与行星排2的行星架相连即共用行星架,与行星排2啮合齿圈固定在差速转向机构的壳体上静止不动。
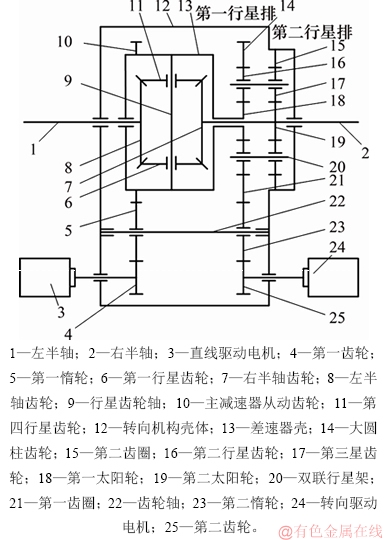
图1 差速转向机构结构简图
Fig. 1 Structure diagram of differential steering mechanism
在工作过程中,双功率流差速转向机构有2路功率输入:一路来源于直线驱动电机,另一路来源于转向驱动电机。这2路功率流在差速转向机构中实现汇流。差速转向机构用转向驱动电机的功率流输入来增加一侧输出轴的转速,同时减小另一侧输出轴的转速,并且增加和减少的量相等,从而实现两端输出轴的转速差,使履带车辆转向。
通过调控2路驱动电机输入轴的旋转速度大小和方向就可以使履带车以不同的半径向左或向右转弯行驶。通常差速转向机构的工作可以分成3种情况:
1) 直线驱动电机工作,转向驱动电机不工作。
2) 转向驱动电机工作,直线驱动电机不工作。
3) 2种驱动电机同时工作。
差速转向机构的样机如图2所示。为了测试双功率流差速转向机构的左、右半轴转速,建立差速转向机构试验测试系统,该测试系统主要由控制器、差速转向机构、速度传感器以及直线、转向驱动电机组成。
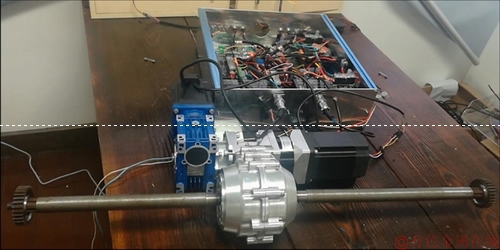
图2 差速转向机构的原理样机
Fig. 2 Principle prototype of differential steering mechanism
2 履带车辆运动学建模与分析
2.1 差速转向机构运动学建模
结合行星齿轮特性和图1,可得差速转向机构各构件的转速关系:
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中:n1为左半轴转速;n2为右半轴转速;n10为主减速器从动齿轮转速;n18为第一太阳轮转速;n19为第二太阳轮转速;n15为第二齿圈转速;n21为第一齿圈转速;n20为行星架转速。
联立式(1)~(3)可得
 (4)
(4)
式中:ia为主减速器主动齿轮与从动齿轮的传动比;ib为转向驱动主动齿轮与第一齿圈的传动比;iv和iw分别为直线和转向驱动电机输出减速机传动比;α为行星排的特性系数;ne1和ne2分别为直线和转向驱动电机输出转速。
履带车左、右两侧驱动轮转速与差速转向机构的左、右输出半轴转速的关系为
 (5)
(5)
式中:ωmk为左、右两侧驱动轮转速;im为差速器输出半轴到驱动轮传动比。
2.2 履带车辆转向运动学模型
履带车辆传动系统原理如图3所示。履带车动力先由直线、转向驱动电机经差速转向机构汇流,差速转向机构左、右半轴输出,再由差速转向机构两输出半轴传到左、右分动机构,最后由与两分动机构相连的链轮链条传到四驱动轮,四驱动轮驱动四履带一起旋转。原理样机实验平台如图4所示,能够快速地添加或去除履带,实现轮履复用[5]。
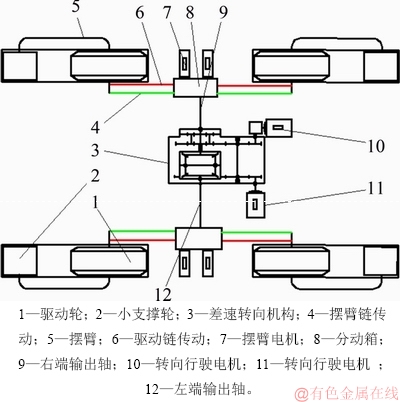
图3 履带车辆传动系统原理图
Fig. 3 Schematic diagram of mobile robot drive system

图4 履带车辆样机
Fig. 4 Prototype mobile robot
为分析履带车辆在水平地面上的转向特性,建立如图5所示的坐标系。图5中:xOy为静坐标系,xLOLyL与xRORyR为固定在左、右两侧履带上的随动坐标系,其中O点为履带车辆的转向中心,O1点为履带车辆的几何中心;R0为转向半径;ωs为转向角速度,rm为驱动轮半径。由图5可知:
 (6)
(6)
式中:B 为左右两侧履带中心线间的距离;vL和vR分别为左侧和右侧驱动轮转速。
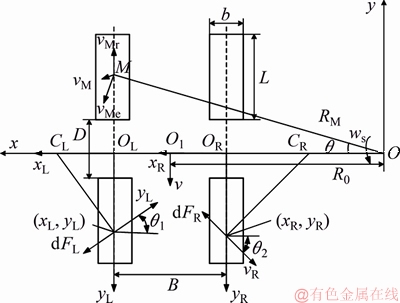
图5 履带车辆转向示意图
Fig. 5 Steering diagram of mobile robot
水平地面上车辆低速稳定转向时履带接地段转向极纵向偏移量较小,通常可以忽略[14]。由图5及式(4)~(6)可得转向半径R0和角速度ωs:
 (7)
(7)
 (8)
(8)
由图5所示,履带车辆转向时,接地履带上任意M点的运动速度vM为
 (9)
(9)
 (10)
(10)
 (11)
(11)
式中:相对速度vMr为接地履带相对于车体的卷绕速度;牵连速度vMe为车辆上与接地履带重合点的平面运动速度;θ为牵连速度vMe与y轴夹角。
 (12)
(12)
2.3 履带车辆转向运动学分析
为验证差速转向机构能够准确地实现履带车辆转向,以差速转向机构直线、转向驱动电机轴转速作为动力输入,对履带车辆转向半径进行研究。
根据式(7),转向半径R0与直线驱动电机转速ne1和转向驱动电机转速ne2的关系如图6所示。从图6可见:转向半径随直线驱动电机转速的增加而增加,而随转向驱动电机转速的增加而减小;尤其在直线驱动电机转速趋近0 r/min时,转向半径急剧增加。如图7所示,分别取转向驱动电机轴转速±500,±1 000和±1 500 r/min为输入,顺时针为正,逆时针为负。当转向驱动电机轴转速ne2>0 r/min时,直线驱动电机轴转速与履带车辆转向半径变化如图7(a)所示。当直线驱动电机轴转速ne1>0 r/min (或ne1<0 r/min)时,履带车辆转向半径随直线驱动电机轴转速增加而增加,履带车辆逆时针(顺时针)转向;当转向驱动电机轴转速ne2<0时,直线驱动电机轴转速与履带车辆转向半径变化如图7(b)所示。当直线驱动电机轴转速ne1>0 r/min (或ne1<0 r/min)时,履带车辆转向半径随直线驱动电机轴转速增加而增加,履带车辆顺时针(或逆时针)转向;当直线驱动电机轴转速ne1=0 r/min时,转向半径R0=0 m,左、右两侧驱动轮转速相等、方向相反,此时,履带车辆顺时针原地转向。
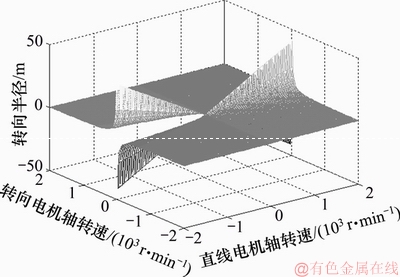
图6 转向半径R0与两驱动电机转速ne1、ne2的关系
Fig. 6 Relationship between turning radius R0 and axial rotation of two drive motor ne1, ne2

图7 直线驱动电机轴转速对转向半径的影响
Fig. 7 Influence of shaft speed of linear drive motor on steering radius
转向驱动电机轴转速对转向半径的影响如图8所示。为分析转向驱动电机轴转速对转向半径的影响,分别取直线驱动电机轴转速±500,±1 000和±1 500 r/min为输入,顺时针为正,逆时针为负。当直线驱动电机轴转速直线ne1>0 r/min时,转向驱动电机轴转速与履带车辆转向半径变化如图8(a)所示。当转向驱动电机轴转速ne2>0 r/min (或ne2<0 r/min)时,履带车辆转向半径随转向驱动电机轴转速增加而减小,履带车辆逆时针(或顺时针)转向。
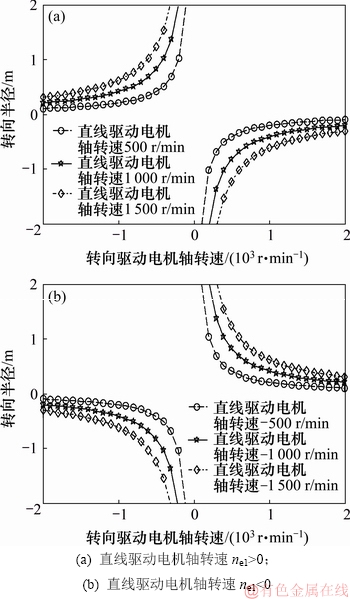
图8 转向驱动电机轴转速对转向半径的影响
Fig. 8 Influence of axle speed of linear drive motor on steering radius
当直线驱动电机轴转速ne1<0 r/min,转向驱动电机轴转速与履带车辆转向半径变化如图8(b)所示。当转向驱动电机轴转速ne2>0 r/min (或ne2<0 r/min)时,履带车辆转向半径随转向驱动电机轴转速增加而减小,履带车辆顺时针(或逆时针)转向;当转向驱动电机轴转速ne2=0 r/min时,转向半径R0→∞,左、右两侧驱动轮转速相等、方向相同,此时,履带车辆向后(或向后)直线行驶。
综上所述:当转向驱动电机轴转速不变时,履带车转向半径随直线驱动电机轴转速增加而增加;当直线驱动电机轴转速不变时,履带车辆转向半径随转向驱动电机轴转速增加而减少,而且履带车辆可以实现任意连续的转向半径(包括原地转向)。
3 履带车辆动力学建模
3.1 差速转向机构动力学模型
差速转向机构中各部件之间理论转矩方程为:
 (13)
(13)
 (14)
(14)
式中:α为行星排的特性系数;M18,M21和M17分别为行星排1中行星齿轮对太阳轮、齿圈、行星架作用的转矩;M19,M15和M17分别为行星排2中行星齿轮分别对太阳轮、齿圈、行星架作用的转矩。由力矩平衡条件及式(13)~ (14)可得:
 (15)
(15)
 (16)
(16)
式中:M1和M2分别为左、右输出半轴输出转矩;M4为直线驱动电机对主减速器主动齿轮的作用转矩;M25为转向驱动电机对小圆柱齿轮的作用转矩。
3.2 履带车辆转向动力学模型
对于本文中的履带车辆在纯履带行驶状态下的转向运动进行如下假设:
1) 车辆在坚实平地上行驶,忽略履带下沉以及其他阻力的影响。
2) 履带车转向速度较慢,可以忽略转向过程中离心力的影响。
3) 四履带接地压力均匀分布。
4) 滚动阻力系数和地面附着系数为定值。
5) 履带车辆在水平硬地面上稳态匀速的转向运动。
6) 不计履带宽度影响,履带为均匀柔性带且不可拉伸,不考虑履带张力的变化对接地压力的影响。
根据假设可知履带接地比压为
 (17)
(17)
式中:m为车辆总质量;g为重力加速度;b为履带车辆履带的接地宽度;L为履带车辆履带的接地长度。橡胶履带转向阻力由履带接地段和地面的摩擦引起,摩擦力的方向与履带对地面相对运动方向相反[14-16]。μ为摩擦因数,dFL和dFR在x轴和y轴方向的分量分别为牵引力和侧向力[15,17-18],因此,x方向μ取附着系数μt为0.66(通过实验测最大牵引力得到),而y方向μ取横向阻力系数μt为 0.9[19]。将dFL分解到xL方向可得
 (18)
(18)
由图5中几何关系可得
 (19)
(19)
 (20)
(20)
则可知外侧履带受到的侧向力和牵引力分别为

 (21)
(21)

 (22)
(22)
取逆时针方向为正,绕OL点的转向阻力矩为



 (23)
(23)
同理,可得外侧履带的侧向力、牵引力和转向阻力矩表达式为

 (24)
(24)

 (25)
(25)



 (26)
(26)
式中:D 为同侧的前后两履带间的距离;B 为左右两侧履带中心线间的距离。
3.3 履带车辆稳态转向模型
当履带车辆在水平地面上稳态转向行驶时,其 纵、横向所受力的合力及各力对车辆质心的合力矩为0 N・m。
 (27)
(27)
 (28)
(28)

 (29)
(29)
将式(20)~(26)代入方程(27)~(29),可得到力及力矩与转向半径之间的关系。根据滚动阻力和转向阻力在y轴分量牵引力得到驱动轮的驱动力。
 (30)
(30)
 (31)
(31)
履带车辆内、外滚动阻力为
 (32)
(32)
式中:f为滚动阻力系数,一般软路面取0.08~0.12,硬路面取0.03~0.06,本文取0.1。采用双功率流差速转向机构的履带车辆的内、外侧履带驱动力Fi均可根据直线、转向行驶驱动电机转矩计算得到可得内、外侧履带驱动力如下:
 (33)
(33)
式中:Me1和Me2分别为直线和转向行驶电机输出转矩。
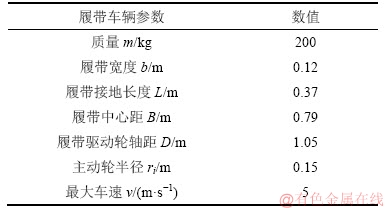
履带车辆的具体参数如表1所示。
表1 履带车辆参数表
Table 1 Mobile robot parameter list
4 差速转向机构仿真分析
基于Adams的虚拟样机对差速转向机构以任意转向半径情况进行运动学仿真。
4.1 任意半径转向
差速转向机构动力输入与输出曲线如图9所示。当2个驱动电机轴同时输入转速时(如图9(a)所示),转向驱动电机轴输入转速为正弦曲线,直线驱动电机轴输入转速为正比例曲线。
如图9(b)所示,当直线驱动电机轴输入转速与转向驱动电机轴输入转速同时工作时,左、右半轴输出转速为两输入转速的叠加,履带车处于边行驶边转向的状态。结合理论分析可得履带车辆可以实现任意连续转向半径(包括原地转向)。任取8对直线、转向驱动输入转速,仿真结果由表2所示。从表2可见:差速转向机构左半轴转速的理论值与运动仿真结果的相对误差小于等于1.50%,差速转向机构右半轴转速的理论值与运动仿真结果的相对误差小于等于1.49%,说明该双功率流差速转向机构拥有良好的转速控制精度和稳定性。理论计算和仿真结果之间的差异在可接受范围内。
4.2 履带车辆转向轨迹跟踪仿真验证
为验证对装备双功率流差速转向机构的履带车辆转向性能理论分析的正确性,在Simulink中搭建仿真模型,同时进行仿真实验分析。
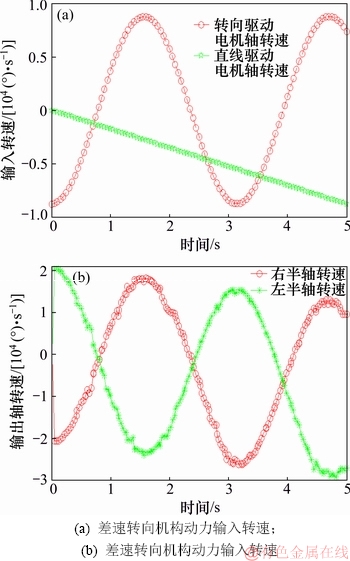
图9 差速转向机构动力输入与输出曲线
Fig. 9 Dynamic input and output curves of differential steering mechanism
表2 差速转向机构仿真结果
Table 2 Simulation results of differential steering mechanism
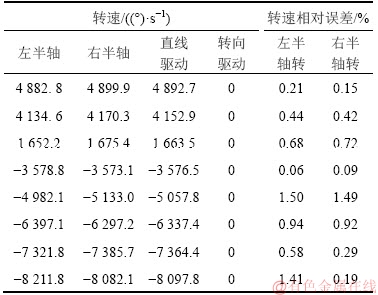
图10所示为具有双功率差速转向机构的履带车辆转向轨迹,仿真实验中履带车辆的参数设置如下:地面与履带车辆的滑动摩擦因数设为0.7,履带车辆的整备质量为200 kg。并进行以下假设:
1) 形心位置与质心位置重合;
2) 地面滑动参数始终保持不变。
从图10可见:考虑与不考虑滑移参数得到的实际转向轨迹的半径都大于期望转向轨迹的半径,但是,考虑滑移参数得到的转向轨迹更加接近实际转向轨迹,与履带车实际转向半径大于理论转向半经的分析结果相符合。
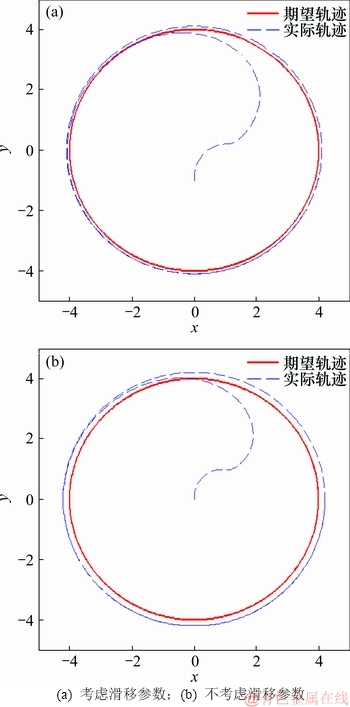
图10 履带车辆转向运动轨迹
Fig. 10 Steering trajectories of tracked vehicle
5 结论
1) 在分析双功率流差速转向机构工作机理的基础上,建立车辆行驶转向过程中差速转向机构的力学模型,推导出两差速转向机构的两电机轴(输入)转速与两半轴(输出)转速的理论模型,为差速转向机构的结构设计、参数选取控制等提供理论依据。
2) 建立履带车稳态转向的数学模型,该模型包含履带接地瞬心的偏移以及履带接地长度、轨距和履带宽度等结构参数,可以较好地预测履带车稳态转向特性,同时能为驱动系统参数选取以及履带车参数优化等提供理论依据。
3) 差速转向机构左、右半轴输出转速的理论值与运动仿真结果相对误差小于等于1.50%,而且该差速转向机构能使履带车辆实现任意的连续转向半径,满足设计要求。
4) 虚拟样机仿真模型得到的实际转向结果与理论计算值较接近,而且考虑滑移实际转向更接近理论转向轨迹。
参考文献:
[1] 曹付义. 履带车辆液压机械差速转向性能分析与参数匹配[D].西安: 西安理工大学机械与精密仪器工程学院, 2009: 1-5.
CAO Fuyi. Study on hydro-mechanic differential turning performance analysis and parameters matching of tracked vehicle[D]. Xi’an: Xi’an University of Technology. Mechanical and Precision Instrument Engineering, 2009: 1-5.
[2] 曹付义, 周志立, 贾鸿社. 履带车辆转向机构的研究现状及发展趋势[J]. 河南科技大学学报(自然科学版), 2003, 24(3): 89-92.
CAO Fuyi, ZHOU Zhili, JIA Hongshe. Studying actualities and developing tendency of turning mechanism of crawler[J]. Journal of Henan University of Science and Technology (Natural Science Edition), 2003, 24 (3): 89-92.
[3] 熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3): 600-607.
XIONG Guangming, LU Hao, GUO Konghui, et al. Research on trajectory prediction of tracked vehicles based on real time slip estimation[J]. Acta Armamentarii, 2017, 38(3): 600-607.
[4] 王红岩, 陈冰, 芮强, 等. 集中载荷作用下的履带车辆稳态转向分析与试验[J]. 兵工学报, 2016, 37(12): 2196-2202.
WANG Hongyan, CHEN Bing, RUI Qiang, et al. Analysis and experiment of steady-state steering of tracked vehicle under concentrated load[J]. Acta Armamentarii, 2016, 37(12): 2196-2202.
[5] 芮强, 王红岩, 王钦龙, 等. 履带车辆转向性能参数分析与试验研究[J]. 机械工程学报, 2015, 51(12): 127-136.
RUI Qiang, WANG Hongyan, WANG Qinlong, et al. Research on the acquisition of steering performance parameters of armored vehicle based on experiments[J]. Journal of Mechanical Engineering, 2015, 51(12): 127-136.
[6] 董超, 成凯, 高学亮, 等. 离心力影响条件下的履带车滑移转向性能分析[J]. 振动.测试与诊断, 2017, 37(1): 76-83.
DONG Chao, CHENG Kai, GAO Xueliang, et al. Tracked vehicle skid steer performance analysis under the influence of the centrifugal force[J]. Journal of Vibration, Measurement & Diagnosis, 2017, 37(1): 76-83.
[7] 曹付义, 周志立, 贾鸿社. 轮履车辆转向性能计算机仿真研究概况[J]. 农业机械学报, 2007, 38(1): 184-188.
CAO Fuyi, ZHOU Zhili, JIA Hongshe. Research summa-rization on simulation of turning performance of tracked vehicle [J]. Transactions of the Chinese Society of Agricultural Machinery, 2007, 38(1): 184-188.
[8] AL-MILLI S, SENEVIRATNE L D, ALTHOEFER K. Track- terrain modeling and traversability prediction for tracked vehicles on soft terrain[J]. Journal of Terramechanics, 2010, 47(4): 151-160.
[9] 迟媛, 蒋恩臣. 履带车辆差速式转向机构性能试验[J]. 农业机械学报, 2008, 39(7): 14-17.
CHI Yuan, JIANG Enchen. Performance tests on differential steering mechanism of tracked vehicle[J]. Transactions of Chinese Society of Agricultural Machinery, 2008, 39(7): 14-17.
[10] SOLIS J M, LONGORIA R G. Modeling track-terrain interaction for transient robotic vehicle maneuvers[J]. Journal of Terramechanics, 2008, 45(3): 65-78.
[11] LIU YUGANG, LIU GUANG JUN. Modeling of tracked mobile manipulators with consideration of track-terrain and vehicle-manipulator interactions [J]. Robotics and Autonomous Systems, 2009, 57(11): 1065-1074.
[12] 孙勇, 李文哲. 双流传动履带车辆转向机构的研究现状及发展趋势[J]. 农机化研究, 2008(3): 235-237.
SUN Yong, LI Wenzhe. Actualities and developing tendency of turning mechanism of tracked vehicles with twin driving[J]. Agricultural Mechanization Research, 2008 (3): 235-237.
[13] 庄皓岚. 特种环境移动机器人控制系统与越障研究[D]. 上海:上海交通大学电子信息与电气学院, 2013: 60-62.
ZHUANG Haolan. Control system of specialized mobile robot and obstacle performance study[D]. Shanghai: Shanghai Jiao Tong University. School of Electronic Information and Electrical Engineering, 2013: 60-62.
[14] ZHU Hua, ZHANG Yong. Robust optimization design on vehicle divided steering linkage[J]. Applied Mechanics and Materials, 2012, 130/131/132/133/134: 270-273.
[15] 李勇, 姚宗伟, 王国强. 四履带车辆转向性能仿真研究[J]. 农业机械学报, 2011, 42(2): 34-39.
LI Yong, YAO Zongwei, WANG Guoqiang. Steering performance simulation of four-tracked vehicles[J]. Journal of Mechanical Engineering, 2011, 42(2): 34-39.
[16] 姚宗伟, 韩进城, 任云鹏. 四履带车辆稳态滑移转向特性研究[J]. 建筑机械, 2011(1): 78-82.
YAO Zongwei, HAN Jincheng, REN Yunpeng. Study skid-steering research of 4-tracked vehicle[J]. Construction Machinery, 2011(1): 78-82.
[17] YAO Zongwei, WANG Guoqiang, GUO Rui, et al. Theory and experimental research on six-track steering vehicles[J]. Vehicle System Dynamics, 2013, 51(2): 218-236.
[18] 宋必文, 李勇, 韩进成, 等. 三履带车辆稳态转向特性研究[J]. 建筑机械, 2011(2): 83-88.
SONG Biwen, LI Yong, HAN Jincheng, et al. steady steering research of three- tracked vehicle[J]. Construction Machinery, 2011(2): 83-88.
[19] WONG J Y. Theory of ground vehicles [M]. 4rd ed. Hoboken, New Jersey: John Wiley and Sons Incorporation, 2008: 390-393.
(编辑 秦明阳)
收稿日期:2018-09-20;修回日期:2018-11-25
基金项目(Foundation item):国家自然科学基金资助项目(51675027) (Project(51675027) supported by the National Natural Science Foundation of China)
通信作者:石志标,博士,教授,从事机械故障诊断,仿生嗅觉等研究;E-mail:shizhibiao@163.com

