一种基于惯性系和捷联惯组的运动基座初始对准方法
孙寿才,谢玲,韩勇强,宋春雷,周建军
(北京理工大学 自动化学院,北京,100081)
摘要:针对传统解析粗对准方位失准角过大影响寻北精度等问题,引入基于惯性坐标系的对准方法。精对准过程中,在基于惯性坐标系的运动基座对准方法基础上,根据航位推算轨迹相似性原理,提出引入误差角闭环修正回路,最大限度的减小由于粗对准引起的第2次停车所带来的位置误差。试验结果证明:粗对准引入基于惯性系的对准方法和精对准中加入闭环修正回路,极大地减小了粗对准对定向精度的影响,增强了载车的机动能力,显著提高了惯导系统的对准精度,在工程中存在广阔的应用前景。
关键词:动基座;捷联惯导;自对准;车载
中图分类号:TP274+.1 文献标志码:A 文章编号:1672-7207(2011)S1-0473-05
SINS alignment algorithm with inertial frame for moving bases
SUN Shou-cai, XIE Ling, HAN Yong-qiang, SONG Chun-lei, ZHOU Jian-jun
(School of Automation, Beijing Institute of Technology, Beijing 100081, China)
Abstract: A new algorithm based on inertial frame was introduced in coarse alignment for SINS to reduce the azimuth error. In accurate alignment, an algorithm based on closed loop feedback system was used to reduce the position error caused by the second short stop and the azimuth error in coarse alignment. The results of aligning experiments show that the alignment algorithm with above-mentioned algorithms can reduce position error, and improve the alignment accuracy for SINS. It has a wide application prospect.
Key words: moving base; SINS; self-alignment; vehicle-based
采用捷联惯导系统的导航系统,在进行导航运算之前必须完成惯导系统的初始对准,初始对准是进行捷联惯性导航的前提。初始对准一般分为粗对准和精对准两个过程,粗对准的目的是给后来的精对准提供一个较准确的姿态初始值,精对准的目的是完成载体坐标系b到导航参考坐标系n之间的相对姿态关系矩阵( )的初始值的准确解算。初始对准又可分为静止基座和运动基座初始对准等。目前,陆用捷联惯性导航系统大多采用静基座初始对准,在载车保持静止状态下,5~10 min才能完成对准,对准精度相对较高,但机动性差、抗干扰能力差,对准过程中,阵风、人员晃动、发动机干扰等都会对对准结果产生较大的影响。为提高快速反应能力,增强载车机动性,文献[1]提出一种基于惯性坐标系的运动基座初始对准方法。利用惯性坐标系作为参考系,采用2次停车观测地球重力矢量在惯性系下的变化实现载体系与本地地理坐标系姿态矩阵的求解,利用概略方位角结合里程计计算位置变化,根据2次停车的相对位移对因车辆位置变化而引入的对准偏差进行补偿。这种方案中影响系统对准精度的主要因素是概略方位角的测量精度及位置误差偿。在实际载车环境下,传统解析粗对准给出的概略方位角误差为5°~10°,不能精确测出2次停车相对位移进行误差补偿,影响对准精度。鉴于上述方案的问题,本文作者提出在粗对准中引入基于惯性坐标系的对准方法,并在精对准中加入方位角闭环修正回路,从而进一步提高系统运动基座初始对准精度。
)的初始值的准确解算。初始对准又可分为静止基座和运动基座初始对准等。目前,陆用捷联惯性导航系统大多采用静基座初始对准,在载车保持静止状态下,5~10 min才能完成对准,对准精度相对较高,但机动性差、抗干扰能力差,对准过程中,阵风、人员晃动、发动机干扰等都会对对准结果产生较大的影响。为提高快速反应能力,增强载车机动性,文献[1]提出一种基于惯性坐标系的运动基座初始对准方法。利用惯性坐标系作为参考系,采用2次停车观测地球重力矢量在惯性系下的变化实现载体系与本地地理坐标系姿态矩阵的求解,利用概略方位角结合里程计计算位置变化,根据2次停车的相对位移对因车辆位置变化而引入的对准偏差进行补偿。这种方案中影响系统对准精度的主要因素是概略方位角的测量精度及位置误差偿。在实际载车环境下,传统解析粗对准给出的概略方位角误差为5°~10°,不能精确测出2次停车相对位移进行误差补偿,影响对准精度。鉴于上述方案的问题,本文作者提出在粗对准中引入基于惯性坐标系的对准方法,并在精对准中加入方位角闭环修正回路,从而进一步提高系统运动基座初始对准精度。
1 运动基座下基于惯性坐标系的 对准
车载捷联惯导系统初始对准的目的在于确定载体坐标系b与导航参考坐标系n之间的相对姿态关系。惯性系是在惯性空间内凝固不动的坐标系,选择初始时刻的载体坐标系为惯性系,即 ,载体系相对与惯性系的变化可由捷联陀螺敏感到,通过解微分方程,可以得到任意时刻的
,载体系相对与惯性系的变化可由捷联陀螺敏感到,通过解微分方程,可以得到任意时刻的 ,见式(1)。
,见式(1)。
 (1)
(1)
t时刻的重力矢量在惯性系i中的投影表示为:
 (2)
(2)
其中: 为通过罗经法调平得到的姿态角矩阵;g为重力标量。
为通过罗经法调平得到的姿态角矩阵;g为重力标量。
停车状态下,IMU测量重力矢量g在惯性系中随地球一起自西向东运动。起始时刻t0到当前时刻t,g的轨迹形成一个锥面,2个时刻重力矢量分别为 ,
, ,如图1所示。
,如图1所示。
在时间t内,地球转过 角度,载体系(b系)的原点从Oi运行到了On(b)。
角度,载体系(b系)的原点从Oi运行到了On(b)。
另 ,
, ,
, 。可见:
。可见: ,
, ,
, 组成了原点在Om,分别指向北东地的正交坐标系,将此坐标系命名为中间过渡坐标系(m系),则m系与i系的转换矩阵为:
组成了原点在Om,分别指向北东地的正交坐标系,将此坐标系命名为中间过渡坐标系(m系),则m系与i系的转换矩阵为:
 (3)
(3)
在tm=(t-t0)/2时刻,m系只需绕y轴转动角度β即与当时本地地理坐标系L(tm)系(NtmEtmDtm)重合,坐标系变换的方向余弦阵设为 。
。
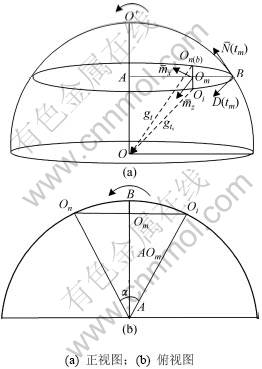
图1 矢量g在惯性系中运动
Fig.1 Moving of vector g in inertial frame
选用本地地理坐标系作为导航系,tm时刻的导航系N(tm)绕地球自转轴旋转α/2角度即可得到t时刻的导航系N(t),这一旋转可通过四元数定义实现,对应的方向余弦阵设为 。
。
因此,可根据下式计算出b系到N系的方向余 弦阵:
 (4)
(4)
2 里程计航位推算相似性原理
在车载航位推算系统中速度和位置计算误差都比较小,如果陀螺漂移很小或者载车行驶时间较短,可认为姿态误差角和里程计刻度系数误差在载车行驶过程中为常值 和
和 ,可得
,可得
 (5)
(5)
其中: 为航位推算累积位置误差,当载车绕行一圈回到原地时有
为航位推算累积位置误差,当载车绕行一圈回到原地时有 ,因而位置误差
,因而位置误差 也为0。
也为0。
通常水平姿态角 和
和 误差都比较小,进一步忽略它们的影响得:
误差都比较小,进一步忽略它们的影响得:
 (6)
(6)
其中: ;
; 为天向姿态误差角。式(6)在水平面上投影可得:
为天向姿态误差角。式(6)在水平面上投影可得:
 (7)
(7)
为方便描述,假设通过惯导系统和里程计航位推算的2条轨迹为r和r′,由此可认为航位推算的2条轨迹r和r′相似,如图2所示。
可以由r构造出r′,即由ri绕d0转动β角再乘以比例系数k则得 。假设d0为原点,ri和的坐标分别为
。假设d0为原点,ri和的坐标分别为 和
和 ,且β角是小角,则矢量ri和之差为:
,且β角是小角,则矢量ri和之差为:
 (5)
(5)
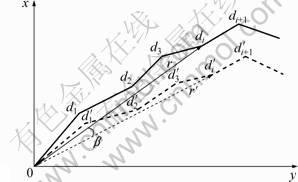
图2 里程计航位推算相似性
Fig.2 Similarity of DR algorithm with speedometer
通过方位角闭环修正回路解算单次转动角β,来计算相邻两次轨迹东西向和南北向相对位移误差,从而进一步补偿因载车第2次停车位置变化引起的方位角误差。
3 对准误差补偿
运动基座初始对准目标是要到达到在2次停车之间可机动行驶,而车辆开动后停车位置变化对方位结果有影响,而形成方位对准误差。对方位角的补偿可根据南北和东西方向的相对位移来计算。
由东西方向相对位移Δew引入的方位角误差为
 (8)
(8)
2次停车东西方向相对位移Δew对从t0时刻到t时刻子午面转动的角度α产生影响。
东西方向误差补偿角为:
 (9)
(9)
南北方向相对位移Δsn引入的方位角误差为:
 (10)
(10)
方位误差角一次补偿是开环控制系统,如图3所示。由于无反馈环节,因此粗对准给出的概略方位角误差较大,方位误差角的补偿精度较低。
闭环控制系统应用反馈来修正粗对准给出的概略方位角,以减小概略方位角的误差,减小里程计航位推算东西向和南北向相对位移的误差,从而提高误差补偿精度,我们可根据里程计航位推算相似性原理进行闭环方位角误差修正,如图4所示。
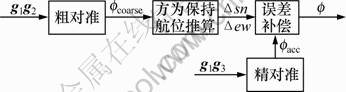
图3 方位误差角开环补偿原理图
Fig.3 Azimuth error compensation with open loop algorithm

图4 方位误差角闭环反馈补偿原理图
Fig.4 Azimuth error compensation with closed loop feedback system algorithm
具体方案如下:在车辆出发前的起始时刻,惯导系统加电,罗经反馈调平后测量重力矢量g1,之后经过较短时间间隔(约30 s)后进行第2次罗经反馈调平测量重力矢量g2,由g1和g2根据前述对准原理可计算出失准角很小的概略方位角;然后,中间过程载车机动行驶,利用捷联惯导系统解算记录姿态变化,并采用解算的方位角,结合里程计输出进行航位推算,计算东西向和南北向相对位移;机动行驶一段时间后,短时停车,再次罗经反馈调平测量重力矢量g3,导航计算机同时根据g1,g3利用对准原理计算载体系与导航系的关系,并利用相对位移信息根据里程计航位推算相似性原理进行多次方位角闭环修正补偿,实现运动基座初始对准。
4 跑车试验
试验设备主要由惯性测量单元(IMU)、导航计算机、里程计和上位计算机构成。其中惯性测量单元(IMU)由二频机抖激光陀螺和石英挠性加速度计组成,分别用于测量载车的角运动信息和线运动信息,如图5所示;选用PC104的导航计算机则将惯性测量单元(IMU)输出信号经过有效补偿后进入导航解算,实时解算出载车的姿态角与方位角等信息;里程计主要用来进行航位推算解算出载车的位置信息;上位机安装Windows操作系统和有运动基座初始对准程序应用软件,利用导航计算机传输过来的姿态位置信息进行对准解算。整套实验设备安装在移动试验平台上,如图6所示。
跑车试验路线选择在北京理工大学附近的三环上,跑车线路图如图7所示,全程大约15 km,其中,2次停车A点和B点的位置均由DGPS 测出,精度为0.11 m。动基座的初始对准过程如下:载车在A点处装载该点大地坐标,在发动机开启、保持车体原地静止状态下,进行30 s的粗对准获得概略方位角,然后驶向B点,最高时速达到80 km/h,约13 min后载车驶至B点停车15 s后进行方位误差角闭环修正与补偿,即精对准,得到该状态下的姿态角和方位角。
本系统的静基座初始对准的精度为0.045°,因此可以以静基座对准的方位作为参考。动基座对准开始前和完成后,保持载体原地静止状态下分别进行3次静基座初始对准,求取平均值作为初始对准参考值。试验按以上步骤进行5组,同时存储试验过程中惯性组件(IMU)和里程计的试验实时数据,然后通过离线仿真计算,可计算得出在传统解析粗对准与不采用方位角误差闭环修正的动基座初始对准结果。

图5 激光捷联惯导系统
Fig.5 Strapdown inertial navigation system (SINS)

图6 试验车
Fig.6 Vehicle with SINS
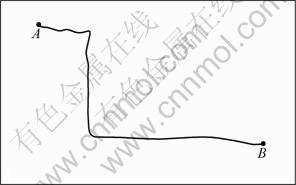
图7 跑车试验路线示意图
Fig.7 Circuit diagram of experiments
试验Ⅰ采用传统解析粗对准且不采用方位角误差闭环修正的离线仿真;试验Ⅱ采用基于惯性系的粗对准,并采用方位角误差闭环修正,试验结果如表1~3所示。
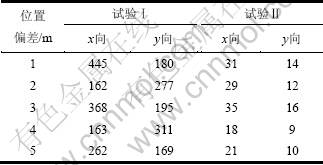
从表1可以看出:采用惯性系粗对准的方位精度可以达到1°以内,远小于采用传统解析粗对准的精度。从表2可以看出:采用方位角误差闭环修正补偿后的方位角对准精度可以达到0.06°,明显优于采用单次补偿的对准精度。从表3可以看出:利用里程计航位推算轨迹相似性原理多次闭环修正方位角误差后的位置定位误差有明显减小,提高了位置误差补偿精度。
表1 2种试验条件下的粗对准误差
Table 1 Azimuth error with two experimental conditions in coarse-alignment

表2 2种试验条件下的动基座对准误差
Table 2 Azimuth error with two experimental conditions in alignment

表3 2种试验条件下的定位误差
Table 3 Position error in two experimental conditions
6 结论
运动基座初始粗对准中应用基于惯性系的对准方法、精对准阶段引入闭环修正环节,不仅实现了载车在运动基座下的初始对准,极大地提高了载车的机动性和快速反应能力,而且,通过引入闭环修正环节,显著提高了定位误差精度,同时,增强了对粗对准的容错性,提高了系统的对准精度。
参考文献:
[1] 练军想, 吴文启, 吴美平, 等. 车载SINS行进间初始对准方法[J] .中国惯性技术学报, 2007, 15(2): 156-159.
LIAN Jun-xiang, WU Wen-qi, WU Mei-ping, et al. SINS initial alignment algorithm for marching vehicles[J]. Journal of Chinese Inertial Technology, 2007, 15(2): 156-159.
[2] Napolitano F, Gaiffe T, Cottreau Y, et al. PHINS: The first high performances inertial navigation system based on fiber optic gyroscopes[C]//Proceedings of 9th Saint Petersburg International Conference on Integrated Navigation systems. Saint Petersburg, 2002: 296-304.
[3] 练军想. 捷联惯导动基座对准新方法及导航误差抑制技术研究[D]. 长沙: 国防科技大学机电工程与自动化学院, 2007: 11-20.
LIAN Jun-xiang. Research on a new moving-base alignment approach and error depression of strapdown inertial navigation system[D]. Changsha: National University of Defense Technology. School of Electrical Engineering and Automation, 2007: 11-20.
[4] 严恭敏, 秦永元, 马建萍. 车载导航系统动态高精度初始对准技术[J]. 系统工程与电子技术, 2006, 28(9): 1404-1407.
YAN Gong-min, QIN Yong-yuan, MA Jian-ping. High precision dynamic initial alignment technique for vehicular navigation system[J]. Systems Engineering and Electronics, 2006, 28(9): 1404-1407.
[5] Lingjuan M, Jun S, Wei L, et al. Initial alignment technique for SINS of vehicles in the moving state[J]. Journal of Beijing Institute of Technology, 2002, 11(3): 234-239.
(编辑 赵俊)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(2005-2010)
通信作者:孙寿才(1986-),男,山东莱州人,硕士研究生,从事导航制导与控制研究;电话:15210515770;E-mail:sunshoucaibit@yahoo.cn

