Three-dimensional neural network tracking control of autonomous underwater vehicles with input saturation
来源期刊:中南大学学报(英文版)2020年第6期
论文作者:唐国元 徐瑞昆 解德 韩丽君
文章页码:1754 - 1769
Key words:autonomous underwater vehicles; trajectory tracking; neural networks; backstepping; input saturation
Abstract: This paper addresses the problem of three-dimensional trajectory tracking control for underactuated autonomous underwater vehicles in the presence of parametric uncertainties, environmental disturbances and input saturation. First, a virtual guidance control strategy is established on the basis of tracking error kinematics, which resolves the overall control system into two cascade subsystems. Then, a first-order sliding mode differentiator is introduced in the derivation to avoid tedious analytic calculation, and a Gaussian error function-based continuous differentiable symmetric saturation model is explored to tackle the issue of input saturation. Combined with backstepping design techniques, the neural network control method and an adaptive control approach are used to estimate composite items of the unknown uncertainty and approximation errors. Meanwhile, Lyapunov-based stability analysis guarantees that control error signals of the closed-loop system are uniformly ultimately bounded. Finally, simulation studies are conducted for the trajectory tracking of a moving target and a spiral line to validate the effectiveness of the proposed controller.
Cite this article as: XU Rui-kun, TANG Guo-yuan, XIE De, HAN Li-jun. Three-dimensional neural network tracking control of autonomous underwater vehicles with input saturation [J]. Journal of Central South University, 2020, 27(6): 1754-1769. DOI: https://doi.org/10.1007/s11771-020-4405-z.

J. Cent. South Univ. (2020) 27: 1754-1769
DOI: https://doi.org/10.1007/s11771-020-4405-z

XU Rui-kun(徐瑞昆)1, TANG Guo-yuan(唐国元)1, 2, XIE De(解德)1, 2, HAN Li-jun(韩丽君)1
1. School of Naval Architecture and Ocean Engineering, Huazhong University of Science and Technology,Wuhan 430074, China;
2. Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration (CISSE),Shanghai 200240, China
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2020
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2020
Abstract: This paper addresses the problem of three-dimensional trajectory tracking control for underactuated autonomous underwater vehicles in the presence of parametric uncertainties, environmental disturbances and input saturation. First, a virtual guidance control strategy is established on the basis of tracking error kinematics, which resolves the overall control system into two cascade subsystems. Then, a first-order sliding mode differentiator is introduced in the derivation to avoid tedious analytic calculation, and a Gaussian error function-based continuous differentiable symmetric saturation model is explored to tackle the issue of input saturation. Combined with backstepping design techniques, the neural network control method and an adaptive control approach are used to estimate composite items of the unknown uncertainty and approximation errors. Meanwhile, Lyapunov-based stability analysis guarantees that control error signals of the closed-loop system are uniformly ultimately bounded. Finally, simulation studies are conducted for the trajectory tracking of a moving target and a spiral line to validate the effectiveness of the proposed controller.
Key words: autonomous underwater vehicles; trajectory tracking; neural networks; backstepping; input saturation
Cite this article as: XU Rui-kun, TANG Guo-yuan, XIE De, HAN Li-jun. Three-dimensional neural network tracking control of autonomous underwater vehicles with input saturation [J]. Journal of Central South University, 2020, 27(6): 1754-1769. DOI: https://doi.org/10.1007/s11771-020-4405-z.
1 Introduction
Over the past few decades, the motion control problem of autonomous underwater vehicles (AUVs) has received much attention in the control engineering. Among these ways, trajectory tracking is of great importance in its application to the aspect of way-point navigation, reconnaissance and surveillance [Zheng, 2017 #2][1]. Since underactuated AUVs are lack of independent propellers and rudders to control all degrees of freedom, which may cause difficulty in the controller design. In the nautical practice, a reliable underactuated control scheme can handle actuator failure, reduce water resistance and simplify the design of AUVs [2]. Hence, nonlinear tracking controller design is of great necessity for such systems to improve its capability of fulfilling the complex mission. In particular, when they are exposed to the situation with the circumstance of model parameter uncertainties and unpredictable external disturbance, it is no doubt a challenge to develop a feasible stabilizing controller to accomplish the tracking mission.
In the existing literature, backstepping techniques are widely favored by researchers in the field of control engineering. For instances, to track a full-actuated ship in the face of slowly time-varying disturbances, GODHAVN et al [3] proposed an adaptive approach and backstepping algorithm to design the tracking controller. DO et al [4] explored the nonlinear coordinate changes and backstepping technique in designing a global tracking control law for underactuated ships with nonzero off-diagonal terms. Based on Lyapunov direct methods, JIANG [5] developed two constructive tracking solutions to achieve the global asymptotic tracking. In order to globally track a reference path, backstepping and Lyapunov’s direct methods were exploited by DO [6] for controlling the underactuated ships in the presence of stochastic disturbance. In addition, the output feedback control methods via position information were proposed [7, 8] to design the tracking control strategies. However, these articles only focused on the trajectory tracking problem of vehicles on the horizontal plane rather than solving this problem in a realistic three-dimensional (3D) manner, and without taking the issue of input saturation into account. Thus, 3D tracking control for an underactuated vehicle with the internal and external disturbance is far from being settled, and this issue is interesting for researchers, which deserves to be concerned.
Recently, LOS guidance system is frequently adopted in the controller design of path-following and target tracking [9-13]. Path following is the task of following a pre-defined path independent of time, i.e., no temporal constraints [14]. By contrast, it is demanded for the vehicle to reach a specific point at a pre-assigned time instant for fulfilling the task of trajectory tracking [11]. For 3D trajectory tracking control of an AUV, there have been many efforts for the full-actuated system [15-17] which cannot be transplanted to underactuated ones due to the absence of actuators. A bunch of 3D path following control strategies were proposed [18], where the backstepping method is a classic technique in the kinematical level of nonlinear approaches for underactuated AUVs to accommodate the accuracy vehicle dynamics. By virtue of backstepping techniques and bio-inspired models, ZHOU et al [19] addressed 3D trajectory tracking of an underactuated AUV with velocity regulation. Notwithstanding, the issue of input saturation was not considered and the error boundary cannot be made enough small via the developed control law. Based on the virtual velocity control and linear system stability theory, LI et al [20] investigated the trajectory tracking control problem of an underactuated AUV in 3D space. Yet, environmental disturbances were not considered. In fact, it is practical and necessary to cosnsider 3D trajectory tracking problem of the underactuated AUV in the sense of unknown external disturbances. A robust adaptive sliding mode control (SMC) approach was designed by TARBOURIECH et al [21] to solve 3D trajectory tracking problem of underactuated AUVs with uncertain dynamics. Nevertheless, the effect of input saturation was not considered in these papers to facilitate the controller development.
Noting that the actuators suffer from their physical constraints to output the control force or torque, and thus effects of actuator saturation in the procedure of controller design cannot be ignored [21, 22]. In practice, the generated control signals may exceed the actual ability of an AUV’s actuators. What is worse, unavoidable input constraint problem may degrade system performance, reduce the undesirable accuracy or even lead instability [23]. To remedy this, the input saturation was considered [1, 24, 25] with the developed control scheme for a class of underactuated surface vessels (USVs). Additionally, an adaptive integral feedback controller was proposed [26] for pitch and yaw channels of an AUV with anti-windup compensators to against the actuator saturation. QI [27] addressed the path following problem of an underactuated underwater vehicle, using the hyperbolic tangent function to prevent the actuators from saturation; however, external disturbances were not taken into consideration and this may jeopardize the practical implementation. Utilizing the LOS guidance method and adaptive NNs, SHOJAEI [28] proposed a tracking controller for underactuated AUVs based on measurements of range and bearing sensors. Yet, to maintain the system performance, singularities of the control scheme need to be avoided by the predefined guidance angles.
As mentioned above and to the best of our knowledge, there are few works involved 3D trajectory tracking control for underactuated AUVs in the presence of input saturation, modeling uncertainty and time-varying external disturbance. Motivated by the above considerations, this paper investigates the problem of 3D trajectory tracking control for underactuated AUVs with the aforementioned nonlinearities. The contributions of this paper are summarized as follows: 1) inspired by the kinematic controller proposed in Ref. [20], virtual velocity guidance laws are formulated on the basis of the resulting error kinematics; 2) in the dynamic control layer, backstepping techniques are utilized to explicitly develop the controller, while the adaptive NN control approach is proposed to approximate the lumped disturbance, which may include the modeling uncertainty, external disturbance and estimate errors. Moreover, the first-order sliding mode differentiator is employed to reject complex differential calculations and the Gaussian error function is adopted to address the input saturation; 3) Based on the Lyapunov stability analysis, the designed controller guarantees that all error signals are stabilized to be UUB. Also, two case studies are contained in the simulation to demonstrate the tracking performance and effectiveness of the proposed control strategy.
The remainder of this paper is structured as follows: preliminaries and problem formulation are introduced in Section 2. Section 3 presents the controller design and stability analysis. Numerical simulation results are provided in Section 4 to validate the performance of the proposed controller. Finally, conclusions are drawn in Section 5.
2 Preliminaries and problem formulation
2.1 Radial basis function NN approximation
The unknown nonlinear functions are usually approximated by radial basis function NN (RBFNN) due to its inherent capabilities, simplicity and linear parameterization [29, 30]. Figure 1 illustrates the general structure of a three-layer RBNN.
For the approximation of an arbitrary continuous function the algorithm can be presented as follows [29]:
the algorithm can be presented as follows [29]:
 i=1, 2, …, m (1)
i=1, 2, …, m (1)
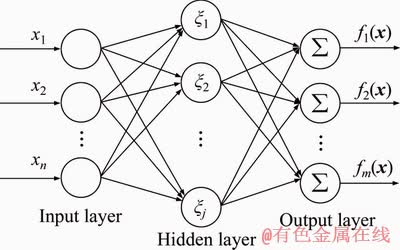
Figure 1 Structure of RBFNN
 j=1, 2, …, l (2)
j=1, 2, …, l (2)
where  and
and  are the input and output vectors, respectively; ||・|| denotes
are the input and output vectors, respectively; ||・|| denotes
 and
and represents the vector of Gaussian basis function. In addition,
represents the vector of Gaussian basis function. In addition,  stands for the weight matrix, m and l are the node numbers of output layer and hidden layer, respectively;
stands for the weight matrix, m and l are the node numbers of output layer and hidden layer, respectively;  is the center vector of receptive field and bj is the width of the Gaussian function. It has been proved that the RBFNN can approach any continuous function over a compact set
is the center vector of receptive field and bj is the width of the Gaussian function. It has been proved that the RBFNN can approach any continuous function over a compact set  to any degree of accuracy. Then we have:
to any degree of accuracy. Then we have:
 (3)
(3)
 (4)
(4)
where  is the ideal weight matrix, and the approximation error ε is bounded by
is the ideal weight matrix, and the approximation error ε is bounded by  where
where  is an unknown constant. It should be pointed out that the ideal weight matrix is hard to be determined, and thus the adaptive learning procedure needs to be taken into consideration to establish the actual weight matrix.
is an unknown constant. It should be pointed out that the ideal weight matrix is hard to be determined, and thus the adaptive learning procedure needs to be taken into consideration to establish the actual weight matrix.
Remark 1. The ideal RBFNN weight matrix is bounded with an unknown constant  such that
such that where ||・||F represents the Frobenius norm of a matrix.
where ||・||F represents the Frobenius norm of a matrix.
2.2 AUV model
As shown in Figure 2, for the motion of an AUV in 3D space, its kinematics can usually be divided into six directions, namely the surge, sway, heave, roll, pitch and yaw directions.
Among this, the position vector  and orientation vector
and orientation vector  are represented in the earth-fixed frame {E}, respectively. In addition,
are represented in the earth-fixed frame {E}, respectively. In addition,  and
and  denote the linear velocity and angular velocity under the body-fixed frame {B}, respectively. In this paper, we consider a classical model of underactuated AUV subjected to unknown external disturbance. Namely, effects of its roll motion are ignored, i.e., f=0, p=0, and thus the five degree-of-freedom (DOF) kinematics can be expressed in the following form [9]:
denote the linear velocity and angular velocity under the body-fixed frame {B}, respectively. In this paper, we consider a classical model of underactuated AUV subjected to unknown external disturbance. Namely, effects of its roll motion are ignored, i.e., f=0, p=0, and thus the five degree-of-freedom (DOF) kinematics can be expressed in the following form [9]:
 (5)
(5)
Then kinetic equations of the AUV are simplified as follows [10, 31]:
 (6)
(6)
where m(・) denotes system inertia cofficients; d(・) expresses the hydrodynamic damping effects; W is the gravity of the AUV and  denotes the difference in height between the center of mass and buoyancy. Besides,
denotes the difference in height between the center of mass and buoyancy. Besides, is the conrol input signal provided by the actuators and
is the conrol input signal provided by the actuators and  represents the bounded time-varying disturbance.
represents the bounded time-varying disturbance.
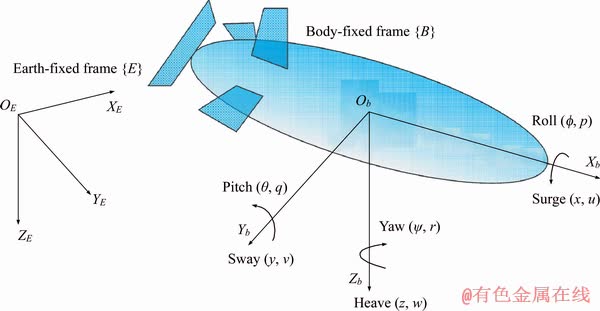
Figure 2 3D configuration of an AUV
The following symmetric input saturation model of the actuators is considered:
 (7)
(7)
where  is the bound of τκ,
is the bound of τκ,  Additionally,
Additionally, stands for the designed input to the actuator, and sign(・) denotes the normal sign function.
stands for the designed input to the actuator, and sign(・) denotes the normal sign function.
Notice here that the above common saturation model cannot be directly applied in the controller design due to the fact that the actuator constraint may result in the system performance degradation, lag or even instability [1]. Hence, the Gauss error function is proposed to tackle this issue, which is defined as following [22]:
 (8)
(8)
Different from the asymmetric saturation model reported in Ref. [22], the unpdated symmetric saturation model with smooth form is written as:
 (9)
(9)
with
 For instance, if
For instance, if 
 the smooth form of the above saturation model can be observed in Figure 3.
the smooth form of the above saturation model can be observed in Figure 3.

Figure 3 Saturation functions
Before proceeding with the controller design, the following assumptions are made.
Assumption 1. Pitch angle of the vehicle satisfies the condition  which makes Eq. (5) well defined, and this assumption is perceived to be resonable due to the existence of metacentric restoring forces during practical operations [31, 32]. Actually speaking, singularity of Eq. (5) can be avoided by a four-parameter description known as the quaternion and Euler parameters used here are helpful to construct the proposed controller.
which makes Eq. (5) well defined, and this assumption is perceived to be resonable due to the existence of metacentric restoring forces during practical operations [31, 32]. Actually speaking, singularity of Eq. (5) can be avoided by a four-parameter description known as the quaternion and Euler parameters used here are helpful to construct the proposed controller.
Assumption 2. For a smooth expected trajectory with bounded derivative
with bounded derivative the environmental disturbance
the environmental disturbance  are supposed to be bounded as
are supposed to be bounded as 
 where
where  is an unknown constant.
is an unknown constant.
2.3 Problem formulation
In order to deal with the saturation problem in the controller design, we introduce the bounded saturation error in which
in which 
 and the constrained input
and the constrained input  with its component form defined in Eq. (9).
with its component form defined in Eq. (9).
In order to give the control objective clearly, the AUV kinematic models presented in Eq. (5) can be expressed in matrix forms as follows:
 (10)
(10)
where η1, η2, υ1 and υ2 are introduced in Section 2.2, while η2 and υ2 degenerate to 

 besides, the rotational matrix
besides, the rotational matrix is defined as:
is defined as:
 (11)
(11)
and the matrix  is defined as
is defined as  [1, 0, tanθ; 0, 1, 0; 0, 0, 1/cosθ]. Subsequently, dynamic models (6) are divided into actuated and unactuated dynamics as follows:
[1, 0, tanθ; 0, 1, 0; 0, 0, 1/cosθ]. Subsequently, dynamic models (6) are divided into actuated and unactuated dynamics as follows:
 (12)
(12)
where M1=diag[mii], i=1, 5, 6, M2=diag[mjj], j=2, 3, v1=[u, q, r]T, v2=[v, w]T, υ=[θ, u, v, w, q, r]T, τ1e=[τeu, τeq, τer]T, τ2e=[τev, τew]T, τd and Δτ are defined above. In addition, from Eq. (6), g1(υ) and g2(υ) can be concluded as:

 (13)
(13)
Consider the smooth expected trajectory ηd with the virtual velocity guidance speed vd=[ud, qd, rd]T, which will be designed later. Assume that the allowable radius of the error space is ρ=[ρ, 0, 0]T, and then error signals needed to be stabilized in this paper are given as follows:
 (14)
(14)
where can be derived on the basis of the property of rotational matrix
can be derived on the basis of the property of rotational matrix and
and
Unactuated dynamic equations of the AUV considered in this paper can be regarded as nonlinear coupling effects acting on the actuated kinetics. Therefore, the dynamic controller can be specified to design an adaptive NN control law in the actuated system, with the aid of backstepping techniques to deal with the resulting terms.
Remark 2. From a practical perspective, the hydrodynamic parameters of an AUV cannot be acquired with high precision, and the environmental disturbance cannot be avoided. In the forthcoming controller design, the adaptive NN control method will be adopted in alliance with backstepping technique to compensate for the uncertainties.
Hence, the control problem is to design a RBFNN-based control scheme by backstepping techniques for the dynamics (10) and error system (12) such that: 1) derive a control law to make the system track the desired trajectory; 2) robustness of the controller can compensate the lumped disturbance, including the model uncertainty, environmental disturbance and input saturation; 3) the error signals defined in Eq. (14) remain UUB.
3 Adaptive NN controller design
Figure 4 describes the basic control framework of the proposed control process. In the kinematic layer, the virtual velocity guidance law is formulated from the error kinematics. To address the supposed uncertainties, backstepping techniques combined with adaptive RBFNN control method are utilized to design the dynamic controller.
3.1 Virtual velocity guidance law
Inspired from the kinematic control law as proposed in Ref. [20], the virtual velocity guidance law can be derived from the error kinematics as shown in Ref. (14). Nevertheless, noting the fact that motion of an underactuated AUV is a gradual process and there needs a buffering zone for the advancement of the control strategy. Hence, we assume that the radius is time-varying with an exponential convergence form. That is  where r1 and r2 are positive constants.
where r1 and r2 are positive constants.
Subsequently, differentiating z1 in Eq. (14) with respect to time yields


 (15)
(15)
where  and the above derivation is based on the property of rotational matrix [15], namely
and the above derivation is based on the property of rotational matrix [15], namely  In addition, the invertible matrix P and skew matrix
In addition, the invertible matrix P and skew matrix  are separately given by:
are separately given by:
 (16)
(16)
Therefore, the virtual velocity guidance law can be proposed as:
 (17)
(17)
where  is a positive definite symmetric matrix. Notice that is a skew matrix such that
is a positive definite symmetric matrix. Notice that is a skew matrix such that  Hence, we choose the following control Lyapunov function (CLF) candidate:
Hence, we choose the following control Lyapunov function (CLF) candidate:
 (18)
(18)
Based on the above considerations and submitting Eqs. (15) and (17) into the time derivative of Eq. (18), we can obtain

 (19)
(19)
In order to realize the 3D trajectory tracking control, coupling terms existing in Eq. (19) will be considered in the backstepping-based design of the dynamic controller.
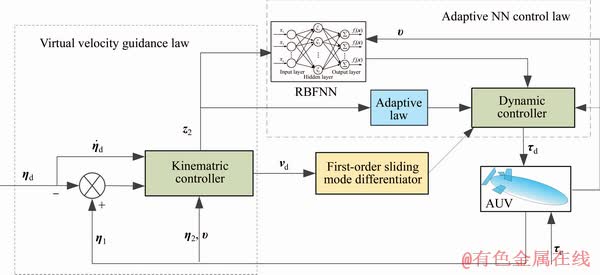
Figure 4 Block diagram of proposed control scheme
3.2 Adaptive NN controller design
To achieve the control objective and start the procedure, several useful lemmas are required.
Lemma 1 [33]. The first-order sliding mode differentiator system is given as:
 (20)
(20)
where lg and lf are positive parameters; κf and κg are the system state variables; κc is the system output and κd denotes a known function. If the differentiator satisfies the initial conditions:  and
and  are bounded, and then κc can approximate
are bounded, and then κc can approximate  with arbitrary accuracy. In other words,
with arbitrary accuracy. In other words,  will be uniformly bounded with an unknown constant
will be uniformly bounded with an unknown constant  i.e.,
i.e.,  if the initial conditions are satisfied.
if the initial conditions are satisfied.
Lemma 2 [34]. For any  and
and  it holds:
it holds:
 (21)
(21)
where tanh(・) is the hyperbolic tangent function and  i.e.,
i.e., 
Denote and
and
 in which the variables are defined in Eqs. (12) and (13).Then, time evolution of ue can be expressed as:
in which the variables are defined in Eqs. (12) and (13).Then, time evolution of ue can be expressed as:
 (22)
(22)
where uc is generated from the first-order sliding mode differentiator (take κ=u in Eq. (20)). Considering the model uncertainty and external disturbance, the desired surge control force, the NN updating law and adaptive law are designed in turn as follows:

 (23)
(23)
 (24)
(24)
 (25)
(25)
with where
where and
and  denote hydrodynamic coefficients of the nominal model when compared with the previous accurate model. Besides, as introduced in Section 2.1,
denote hydrodynamic coefficients of the nominal model when compared with the previous accurate model. Besides, as introduced in Section 2.1, 

 l denotes the NN node numbers and
l denotes the NN node numbers and  is the input vector.
is the input vector. 
 γu, λu and μu are positive design parameters to be chosen later.
γu, λu and μu are positive design parameters to be chosen later.
Continue the similar operation in the pitch direction, and its error equation becomes:
 (26)
(26)
where qc is the output of the differentiator system. Similarly, utilizing the resulting terms existing in Eq. (19), design the following pitch control laws:

 (27)
(27)
 (28)
(28)
 (29)
(29)
where W0 denotes the relevant parameter of nominal model and
W0 denotes the relevant parameter of nominal model and  Γq, γq, λq, μq are positive constants.
Γq, γq, λq, μq are positive constants.
Similarly, the error equation in yaw direction is updated as:
 (30)
(30)
where rc is output of the differentiator system. Then the proposed control laws is given as:

 (31)
(31)
 (32)
(32)
 (33)
(33)
with  and positive gains
and positive gains  Γr, γr, λr, μr.
Γr, γr, λr, μr.
Remark 3. To prevent the explosion of complexity in the traditional backstepping design techniques, the first-order sliding mode differentiator is directly applied to the controller. In addition, the success of the above control framework depends on the introduced constraint model and adaptive control method to approximate the resulting estimate errors. Therefore, compared with the traditional backstepping method, the proposed controller can reduce the consumption to the computer system resources and deal with more complicated disturbance.
Remark 4. In the development of the above adaptive NN controller, nominal model is proposed to replace the accurate model. It is usually assumed that the parameters will fluctuate around 10%-15% relative to the parameters of the accurate model [35, 36], while in this work, the nominal model parameters will simultaneously decrease 20% by the actual model.
3.3 Stability analysis
To simplify the derivation process, we make notations:







 Notice that the vehicle is exposed to model uncertainty, external disturbance and input saturation, we can assume that
Notice that the vehicle is exposed to model uncertainty, external disturbance and input saturation, we can assume that  is bounded by an unknown constant
is bounded by an unknown constant  such that
such that 
As mentioned in Section 2.1, the adaptive RBFNN is utilized here to approximate nonlinear functions, i.e., the lumped uncertainty, and the uncertain functions estimated by RBFNN are calculated as:
 (34)
(34)
where  u, q and r are generated from the differentiator system, which means that:
u, q and r are generated from the differentiator system, which means that:
 (35)
(35)
With the block matrix 
 in mind, the nonlinear function approached by the RBFNN presented in Eq. (34) can be written as
in mind, the nonlinear function approached by the RBFNN presented in Eq. (34) can be written as  with
with  Specially, using the similar depection of NN estimation in Section 2.1, its ideal matrix approximation form can be written as:
Specially, using the similar depection of NN estimation in Section 2.1, its ideal matrix approximation form can be written as:
 (36)
(36)
where is bounded, which means that there exist unknown constants
is bounded, which means that there exist unknown constants  such that
such that  .
.
Theorem 1. Consider the AUV model expressed by Eqs. (5) and (6) satisfying Assumptions 1 and 2. The proposed adaptive NN controller Eqs. (23)-(25), Eqs. (27)-(29) and Eqs. (31)-(33) can guarantee all error signals defined in Eq. (14) uniformly ultimately bounded (UUB). Meanwhile, the systematical errors can be made arbitrarily small by adjusting the control design parameters.
Proof. Define the error weight matrix  and notice here that the RBFNN approximation error
and notice here that the RBFNN approximation error  is bounded by an unknown constant, which can be shown as
is bounded by an unknown constant, which can be shown as  Then if the adaptive approximation error is noted as
Then if the adaptive approximation error is noted as  with
with 
 and
and  where
where  Choose the following Lyapunov function candidate for the whole system:
Choose the following Lyapunov function candidate for the whole system:
 (37)
(37)
where tr(A) denotes the trace of matrix  with the property
with the property From the second formula of Eq. (14), we can get
From the second formula of Eq. (14), we can get 
 With the above considerations and Eq. (19) in mind, differentiating V with respect to time along the proposed control law Eqs. (23)-(25), Eqs. (27)-(29) and Eqs. (31)-(33) yields
With the above considerations and Eq. (19) in mind, differentiating V with respect to time along the proposed control law Eqs. (23)-(25), Eqs. (27)-(29) and Eqs. (31)-(33) yields

 (38)
(38)
According to the definition of the trace, we have By virtue of Lemma 2 and following inequalities:
By virtue of Lemma 2 and following inequalities:
 (39)
(39)
where 
 and
and  is the minmum eigenvalue of matrix
is the minmum eigenvalue of matrix  Eq. (38) can be updated as:
Eq. (38) can be updated as:

 (40)
(40)
with  By noting the definition of radius ρ, we know that its time derivative converges to zero with an exponential trend, and thus
By noting the definition of radius ρ, we know that its time derivative converges to zero with an exponential trend, and thus  will be ultimately bounded by a small constant o, i.e.,
will be ultimately bounded by a small constant o, i.e., Hence, Eq. (39) can be simplified to:
Hence, Eq. (39) can be simplified to:
 (41)
(41)
where λ and μ are expressed as follows:
 (42)
(42)
Now integrating both sides of Eq. (41) over [0, t] results in
 (43)
(43)
From Eq. (43), one can obtain  For bounded initial conditions, the boundness of Lyapunov function
For bounded initial conditions, the boundness of Lyapunov function  means that the closed-loop error signals
means that the closed-loop error signals 

 and
and  are bounded. For example, the position error variable
are bounded. For example, the position error variable  will ultimately coverage to the compact set
will ultimately coverage to the compact set  and the velocity error
and the velocity error  will be ultimately bounded by
will be ultimately bounded by In summary, the result indicates that all defined error signals of the overall control system are UUB. Meanwhile, it can be found that the bounded error variables can be made small enough by adjusting the control parameters appropriately.
In summary, the result indicates that all defined error signals of the overall control system are UUB. Meanwhile, it can be found that the bounded error variables can be made small enough by adjusting the control parameters appropriately.
Remark 5. In practice, control gains are adjusted by the method of trial and error [14]. In fields of the marine cybernetics, bounded stability is common and practical. To help the dynamic controller development, a normal nonlinear control problem can be specified in the sense that the virtual velocity guidance law generated in the resulting error kinematics can resolve the system into actuated and unactuated ones.
4 Simulation results
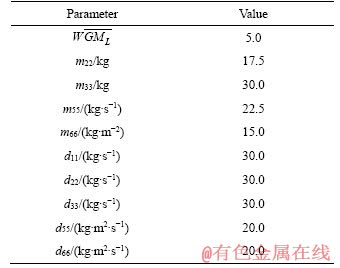
In this section, to illustrate and verify the effectiveness of the proposed controller, numerical simulations are performed on the underactuated AUV models (5) and (6). Correspondingly, accurate model parameters are given in Table 1 [14].
Also, the unknown time-varying disturbance is supposed as  *=u, v, w, q, r. In the following two case studies, initial position and orientation for the AUV are set as:
*=u, v, w, q, r. In the following two case studies, initial position and orientation for the AUV are set as: 
 and initial velocity vector
and initial velocity vector 
Denote In as the identity matrix of dimension n, and the identical controller parameters are set as r1=0.1, r2=10, K1=I3, K2=120I3, Γ1=I3, H1=0.5I3, Γ2=I3, H2=I3,  Alternatively, parameters of the first-order sliding mode differentiator are chosen as: lg=1, lf=1.5. The RBFNN contains 95=59049 nodes and its centers are distributed evenly in product space [-7, 7]×[-7, 7]×[-7, 7]× [-7, 7] and its widths are 20. The magnitude of actuated force and torque is given by:
Alternatively, parameters of the first-order sliding mode differentiator are chosen as: lg=1, lf=1.5. The RBFNN contains 95=59049 nodes and its centers are distributed evenly in product space [-7, 7]×[-7, 7]×[-7, 7]× [-7, 7] and its widths are 20. The magnitude of actuated force and torque is given by:
 and
and 
Table 1 AUV model parameters
4.1 Case study 1
Considering a spiral line as the desired trajectory, which is parameterized by

As shown in Figures 5-7, the proposed control scheme can guarantee that the AUV tracks the desired reference trajectory after a small turn at the initial stage. In fact, due to the underactuated feature of the AUV in sway and heave directions, the system actuated by the proposed velocity guidance law should be responsible for this turning phenomenon, and the input constraint may also make this impact.

Figure 5 xyz plot of trajectory tracking for case 1
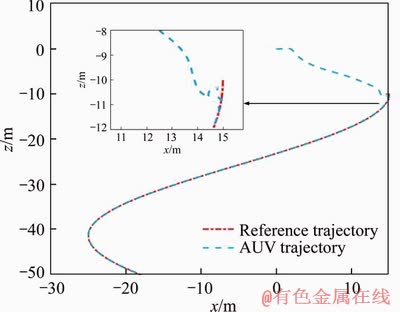
Figure 6 xz plot of trajectory tracking for case 1
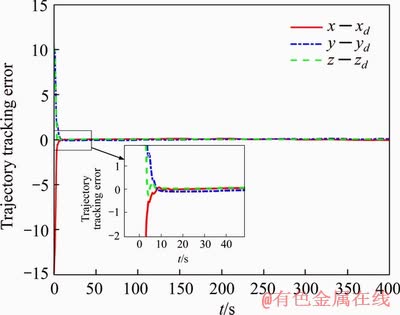
Figure 7 Trajectory tracking errors for case 1
Additionally, the turn phenomena can be found in the primary stage of Figure 7, which depicts that tracking errors in x, y, z directions can converge to the respective desired profiles despite of the assumed disturbance. It can be concluded that the proposed velocity guidance law can effectively narrow position errors in the kinematic layer if the dynamic controller can successfully realize the prearranged velocity tracking.
In Figure 8, tracking performance of the virtual velocity shows the designed guidance mechanism, which manifests that the vehicle actuated by the proposed controller will move with a reasonable speed under the presence of input saturation. Obviously, its initial velocity variations are moderate to reject a sudden change instead of being in accordance with the predesigned velocities. Meanwhile, Figure 9 shows the vehicle’s velocity in sway and heave directions, which indicates that the unactuated velocities will keep a small-amplitude fluctuation around zero point and this is thought to be acceptable in practical situations.

Figure 8 Tracking of virtual velocities for case 1
Figures 10 and 11 present time response curves of the adaptive law and control input, respectively,(Tu is an equivalent representation of the designed control force τu). It is indicated that the designed adaptive law can effectively estimate the lumped uncertainties, i.e., the RBFNN approximate error and input saturation error. Figure 11 shows that the control system suffers from input saturation at the initial stage to prevent the unacceptable velocities of the AUV, which can be found in the duration curve of velocity guidance law (Figure 8).
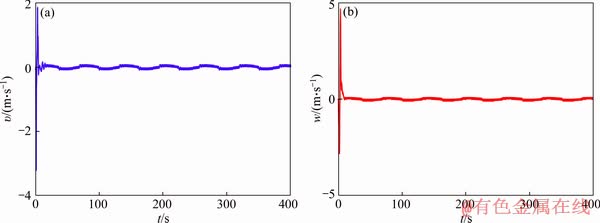
Figure 9 AUV velocities v and w for case 1

Figure 10 Output of adaptive laws for case 1
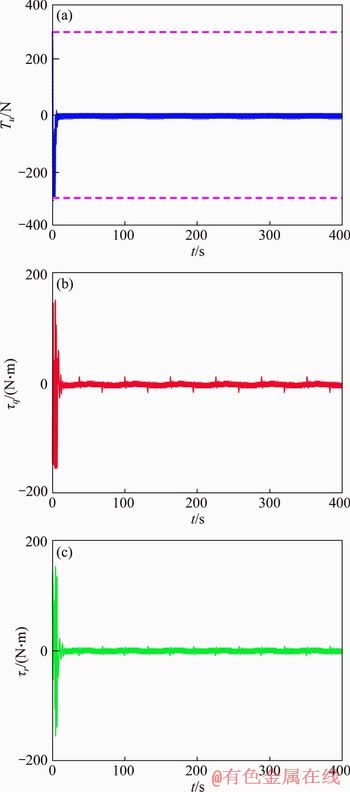
Figure 11 Control input signals for case 1
Hence, despite of smaller drift effects existing in sway and heave directions, it can be observed that the proposed control strategy can guarantee 3D tracking performance of the underactuated AUV to handle the lumped uncertainty of input saturation, model parameter perturbation and unknown environmental disturbance.
4.2 Case study 2
This section considers the tracking object is an AUV modeled by the same kinematics and dynamics shown in Eqs. (5) and (6) without external disturbance. Control input of the target AUV is set as:  and its initial position and orientation are separately given by
and its initial position and orientation are separately given by
 with the initial velocity
with the initial velocity
Similarly, when the target object is an AUV, the proposed controller shows a good tracking performance of the underactuated AUV in spite of the input saturation, model uncertainties and external disturbances caused by waves and ocean currents. In the trajectory process, Figures 12 and 13 depict the trajectory tracking in xyz plane and xz plane, respectively. Correspondingly, the tracking errors presented in three directions are given in Figure 14. Figure 17 displays time response curves of the adaptive law, which shows that the considered errors can be estimated to support the control strategy.
In Figure 16, sway speed presents a cyclical change around a neighborhood of the origin, which is resulted from unactuated dynamics and non- vanishing environmental disturbance. In addition, Figure 15 shows that the angular velocity undergoes a cyclic variation in a small magnitude due to the impact of the virtual velocity guidance law and designed time-varying disturbance. While in the tracking mission, it can be viewed that the velocity tracking is implemented well in pitch and yaw directions except the surge direction at the initial stage. Figure 18 indicates that the control system suffers from the input saturation in surge direction, and thus the vehicle cannot provide an unacceptable force to move with a higher speed.

Figure 12 xyz plot of trajectory tracking for case 2
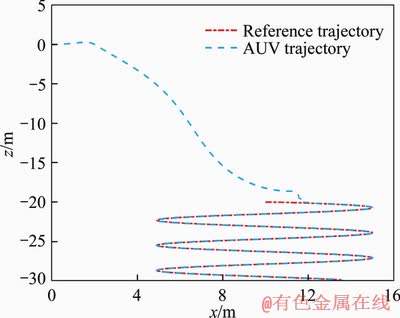
Figure 13 xz plot of trajectory tracking for case 2

Figure 14 Trajectory tracking errors for case 2
In Figures 15 and 18, the proposed control approach shows a good capability to prevent the saturation phenomenon during the intermediate control phase. Meanwhile, input saturation is thought to be well addressed in the velocity tracking at the initial stage. Yet, the control inputs vary widely in a short time at the initial adjusting stage, which may exceed the actual response capability of control devices. Thus, parameter optimization mechanism should be taken into consideration to improve the performance of the developed controller, and this will be considered in our future work.
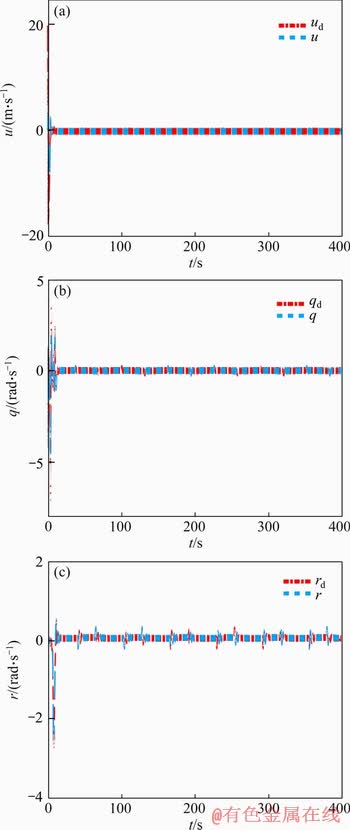
Figure 15 Tracking of virtual velocities for case 2
According to the above executed cases, the proposed controller can steer the underactuated AUV to successfully track the expected trajectory, whether for a predefined curve or moving target with the existence of parameter perturbation, input saturation and unknown environmental disturbance. That is, the proposed control law has good adaptability. Also, other simulation results confirm the tracking performance of the controller.

Figure 16 AUV velocities v and w for case 2
5 Conclusions
1) An adaptive NN controller is proposed for 3D trajectory tracking control of an underactuated AUV which is exposed to the lumped disturbance, including input saturation, parametric uncertainty and external disturbance.
2) The virtual velocity law derived from the error kinematics is introduced to resolve the overall control system into a guidance system and nonlinear control problem. In the dynamic control layer, backstepping techniques and an adaptive RBFNN controller are proposed to attenuate the effects of the resulting terms left in the error kinematics. Stability of the closed-loop system can be guaranteed by the Lyapunov’s direct method, and all defined error signals in the control system are proved to be UUB.
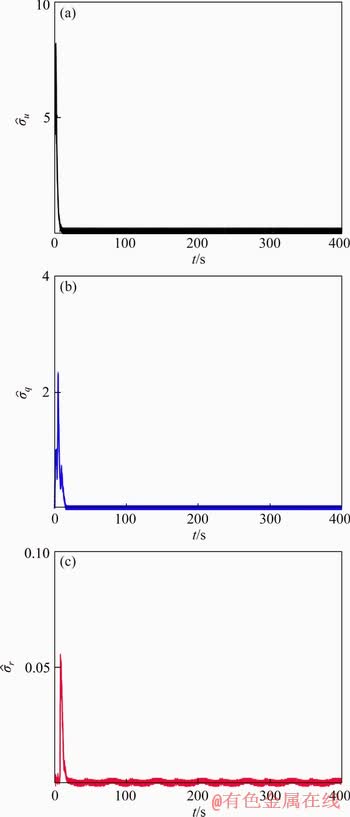
Figure 17 Output of adaptive laws for case 2
3) Simulation results indicate that the proposed control strategy has robustness against the lumped disturbance. Future work can take the dynamic behavior of the actuator into account of the controller design to improve the control precision.
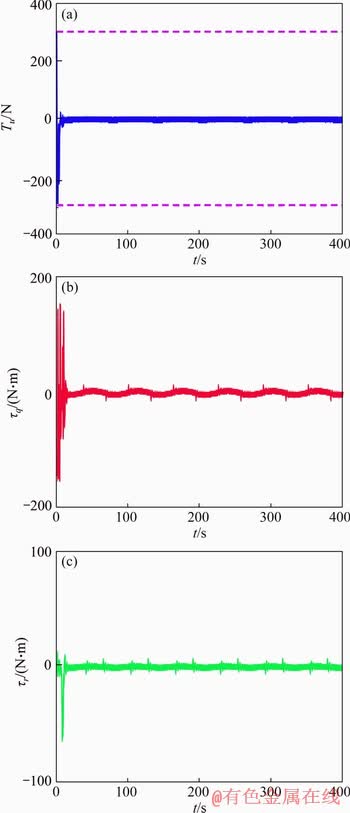
Figure 18 Control input signals for case 2
References
[1] ZHENG Ze-wei, JIN Cheng, ZHU Ming, SUN Kang-wen. Trajectory tracking control for a marine surface vessel with asymmetric saturation actuators [J]. Robotics and Autonomous Systems, 2017, 97: 83-91. DOI: 10.1016/ j.robot.2017.08.005.
[2] PETTERSEN K Y, NIJMEIJER H. Underactuated ship tracking control: Theory and experiments [J]. International Journal of Control, 2001, 74(14): 1435-1446. DOI: 10.1080/00207170110072039.
[3] GODHAVN J M, FOSSEN T I, BERGE S P. Non-linear and adaptive backstepping designs for tracking control of ships [J]. International Journal of Adaptive Control Signal Process, 1998, 12(8): 649-670. DOI: 10.1002/(SICI)1099- 1115(199812)12:8<649::AID-ACS515>3.0.CO;2-P.
[4] DO K D, PAN Jie. Global tracking control of underactuated ships with nonzero off-diagonal terms in their system matrices [J]. Automatica, 2005, 41(1): 87-95. DOI: 10.1016/j.automatica.2004.08.005.
[5] JIANG Zhong-ping. Global tracking control of underactuated ships by Lyapunov’s direct method [J]. Automatica, 2002, 38 (2): 301-309. DOI: 10.1016/S0005- 1098(01)00199-6.
[6] DO K D. Global robust adaptive path-tracking control of underactuated ships under stochastic disturbances [J]. Ocean Engineering, 2016, 111: 267-278. DOI: 10.1016/j.oceaneng. 2015.10.038.
[7] LIAO Yu-lei, ZHANG Ming-jun, WAN Lei, LI Ye. Trajectory tracking control for underactuated unmanned surface vehicles with dynamic uncertainties [J]. Journal of Central South University, 2016, 23(2): 370-378. DOI: 10.1007/s11771-016-3082-4.
[8] XU Rui-kun, TANG Guo-yuan, XIE De, HUANG Dao-min, HAN Li-jun. Underactuated tracking control of underwater vehicles using control moment gyros [J]. International Journal of Advanced Robotic Systems, 2018, 15(1): 1-8. DOI: 10.1177/1729881417750759.
[9] XIANG Xian-bo, YU Cao-yang, ZHANG Qin. Robust fuzzy 3D path following for autonomous underwater vehicle subject to uncertainties [J]. Computer & Operartion Research, 2017, 84: 165-177. DOI: 10.1016/j.cor.2016.09.017.
[10] XIANG Xian-bo, YU Cao-yang, ZHANG Qin, XU Guo-hua. Path-following control of an AUV: Fully actuated versus under-actuated configuration [J]. Marine Technology Society Journal, 2016, 50(1): 34-47. DOI: 10.4031/MTSJ.50.1.4.
[11] YU Cao-yang, XIANG Xian-bo, LAPIERRE L, ZHANG Qin. Nonlinear guidance and fuzzy control for three- dimensional path following [J]. Ocean Engineering, 2017, 146: 457-467. DOI: 10.1016/j.oceaneng.2017.10.001.
[12] GLOTZBACH T, SCHNEIDER M, OTTO P. Cooperative line of sight target tracking heterogeneous unmanned marine vehicle teams: From theory to practice [J]. Robotics and Autonomous Systems, 2015, 67: 53-60. DOI: 10.1016/ j.robot.2014.09.012.
[13] SHOJAEI K, DOLATSHAHI M. Line-of-sight target tracking control of underactuated autonomous underwater vehicles [J]. Ocean Engineering, 2017, 133: 244-252. DOI: 10.1016/j.oceaneng.2017.02.007.
[14] FOSSEN T I. Handbook of marine craft hydrodynamics and motion control [M]. UK: John Wiley & Sons, 2011.
[15] MUKHERJEE K, KAR I N, BHATT R K P. Region tracking based control of an autonomous underwater vehicle with input delay [J]. Ocean Engineering, 2015, 99: 107-114. DOI: 10.1016/j.oceaneng.2015.02.006.
[16] GAO Jian, PROCTOR A, BRADLEY C. Adaptive neural network visual servo control for dynamic positioning of underwater vehicles [J]. Neurocomputing, 2015, 167: 604-613. DOI: 10.1016/j.neucom.2015.04.028.
[17] WANG Yu-jia, ZHANG Ming-jun, WILSON P A, LIU Xing. Adaptive neural network-based backstepping fault tolerant control for underwater vehicles with thruster fault [J]. Ocean Engineering, 2015, 110: 15-24. DOI: 10.1016/j.oceaneng. 2015.09.035.
[18] ENCARNACAO P, PASCOAL A. 3D path following for autonomous underwater vehicle [C]// Proceedings of the 39th IEEE Conference on Decision and Control. 2000, 3: 2977-2982. DOI: 10.1109/CDC.2000.914272.
[19] ZHOU Jia-jia, YE Ding-qi, ZHAO Jun-peng, HE Dong-xu. Three-dimensional trajectory tracking for underactuated AUVs with bio-inspired velocity regulation [J]. International Journal of Naval Architecture and Ocean Engineering, 2018, 10(3): 282-293. DOI: 10.1016/j.ijnaoe.2017.08.006.
[20] LI Ye, WEI Cong, WU Qi, CHEN Peng-yun, JIANG Yan-qing, LI Yi-ming. Study of 3 dimension trajectory tracking of underactuated autonomous underwater vehicle [J]. Ocean Engineering, 2015, 105: 270-274. DOI: 10.1016/ j.oceaneng.2015.06.034.
[21] TARBOURIECH S, TURNER M. Anti-windup design: An overview of some recent advances and open problems [J]. IET Control Theory & Applications, 2009, 3(1): 1-19. DOI: 10.1049/iet-cta:20070435.
[22] MA Jian-jun, GE S S, ZHENG Zhi-qiang, HU De-wen. Adaptive NN control of a class of nonlinear systems with asymmetric saturation actuators [J]. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(7): 1532-1538. DOI: 10.1109/TNNLS.2014.2344019.
[23] ZHENG Ze-wei, FEROSKHAN M. Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances [J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(6): 2564-2575. DOI: 10.1109/TMECH.2017.2756110.
[24] WEN Chang-yun, ZHOU Jing, LIU Zhi-tao, SU Hong-ye. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation and external disturbance [J]. IEEE Transactions on Automatic Control, 2011, 56(7): 1672-1678. DOI: 10.1109/TAC.2011.2122730.
[25] LIU Cheng, CHEN C L P, ZOU Zao-jian, LI Tie-shan. Adaptive NN-DSC control design for path following of underactuated surface vessels with input saturation [J]. Neurocomputing, 2017, 267: 466-474. DOI: 10.1016/ j.neucom.2017.06.042.
[26] SARHADI P, NOEI A R, KHOARAVI A. Adaptive integral feedback controller for pitch and yaw channels of an AUV with actuator saturations [J]. ISA Transactions, 2016, 65: 284-295. DOI: 10.1016/j.isatra.2016.08.002.
[27] QI Xue. Spatial target path following control based on Nussbaum gain method for underactuated underwater vehicle [J]. Ocean Engineering, 2014, 104: 680-685. DOI: 10.1016/ j.oceaneng.2015.06.014.
[28] SHOJAEI K. Three-dimensional neural network tracking control of a moving target by underactuated autonomous underwater vehicles [J]. Neural Computing and Applications, 2019, 31(2): 509-521. DOI: 10.1007/s00521-017-3085-6.
[29] GE S S, WANG Cong. Direct adaptive NN control of a class of nonlinear systems [J]. IEEE Transactions on Neural Networks, 2002, 13(1): 214-221. DOI: 10.1109/72.977306.
[30] LEWIS F L, DAWSON D M, ABDALLAH C T. Robot manipulator control theory and practice [M]. 2nd ed. New York: Marcel Dekker Inc, 2004.
[31] DO K D, PAN J. Control of ships and underwater vehicles: Design for underactuated and nonlinear marine systems [M]. Germany: Springer-Verlag, 2009.
[32] FOSSEN T I. Marine control systems [M]. Trondheim, Norway: Marine Cybernetics, 2002.
[33] LEVANT A. Robust exact differentiation via sliding mode technique [J]. Automatica, 1998, 34: 379-384. DOI: 10.1016/S0005-1098(97)00209-4.
[34] POLYCARPOU M M, IOANNOU P A. A robust adaptive nonlinear control design [J]. Automatica, 1996, 32: 423-427. DOI: 10.1016/0005-1098(95)00147-6.
[35] DO K D, PAN Jie, JIANG Zhong-ping. Robust and adaptive path following for underactuated autonomous underwater vehicles [J]. Ocean Engineering, 2004, 31: 1967-1997. DOI: 10.1016/j.oceaneng.2004.04.006.
[36] XU Jian, WANG Man, ZHANG Geng-shi. Trajectory tracking control of an underactuated unmanned underwater vehicle synchronously following mother submarine without velocity measurement [J]. Advances in Mechanical Engineering, 2015, 7(7): 1-11. DOI: 10.1177/1687814015 595340.
(Edited by FANG Jing-hua)
中文导读
具有输入约束的自主式水下航行器三维神经网络跟踪控制
摘要:本文研究了欠驱动自主式水下航行器在具有参数不确定、环境干扰以及输入饱和受限下的三维轨迹跟踪控制问题。首先,基于跟踪误差运动学,建立的虚拟导航控制律将整个控制系统分解成两个级联子系统。其次,引入一阶滑模微分器避免求导过程中复杂的解析计算,并考虑基于高斯误差函数的连续可微对称饱和模型处理输入约束问题。借助反步法设计法,神经网络控制方法以及自适应控制策略,估计未知不确定项和逼近误差项。同时,基于Lyaunov直接法保证了该闭环系统的控制误差项最终一致有界性。最后,仿真结果验证了所提出的控制器对移动目标和空间曲线的轨迹跟踪有效性。
关键词:自主式水下航行器;轨迹跟踪;神经网络;反步法;输入饱和
Foundation item: Project(51979116) supported by the National Natural Science Foundation of China; Project(2018KFYYXJJ012, 2018JYCXJJ045) supported by the Fundamental Research Funds for the Central Universities, China; Project(YT19201702) supported by the Innovation Foundation of Maritime Defense Technologies Innovation Center, China; Project supported by the HUST Interdisciplinary Innovation Team Project, China
Received date: 2019-08-05; Accepted date: 2019-11-26
Corresponding author: TANG Guo-yuan, PhD, Associate Professor; Tel: +86-13477097927; E-mail: tgyuan@hust.edu.cn; ORCID: 0000-0001-9468-8720

