DOI: 10.11817/j.issn.1672-7207.2016.11.012
考虑参数灵敏度的电动汽车回馈制动模糊控制
刘志强,汪浩磊,杜荣华
(长沙理工大学 汽车与机械工程学院,湖南 长沙,410114)
摘要:分析影响电动汽车制动能量回馈的主要因素;以制动能量最大化为目标,建立电液复合制动力分配模型,设计以电液复合制动特性参数蓄电池荷电状态(SOC)、制动强度、车速为输入,回馈制动比例为输出的制动力模糊分配规则。同时,以能量回收率为评价指标对SOC、制动强度及车速进行灵敏度分析。研究结果明:SOC对能量回收率的影响最大,制动强度对能量回收率的影响次之;根据各特性参数对评价指标的影响权重,可改进电液复合制动力分配模糊规则;在相同制动工况下,考虑参数灵敏度的电动汽车电液复合回馈制动模糊控制方法可有效提高制动能量回收率。
关键词:电动汽车;制动力分配;模糊控制;灵敏度分析
中图分类号:U462.3+2 文献标志码:A 文章编号:1672-7207(2016)11-3700-07
Fuzzy control method of regenerative braking in electric vehicles considering parameter sensitivity
LIU Zhiqiang, WANG Haolei, DU Ronghua
(School of Automotive and Mechanical Engineering, Changsha University of Science and Technology,
Changsha 410114, China)
Abstract: The influence factors on braking energy feedback in electric vehicles were analyzed. To recycle more energy, a braking force distribution model was established, and a fuzzy controller on braking force distribution was designed, in which the inputs parameters were vehicle speed, braking strength and battery SOC, and output parameter was regenerative braking ratio. The sensitivity analysis of SOC, braking strength and vehicle speed was conducted by adopting a perturbation method, in which energy recovery rate was taken as the evaluation index. The results show that SOC has the greatest impact on energy recovery ratio, and braking strength has the second impact. So the fuzzy rules for the electronic-hydraulic-compound braking force distribution are improved in accordance with the influence weight of each characteristic parameter to the evaluation index. The recovery ratio of regenerative braking energy can be increased effectively by using fuzzy control method, in which the sensitivities of the characteristic parameters are considered.
Key words: electric vehicle; braking force distribution; fuzzy control; sensitivity analysis
纯电动汽车在汽车工业中起越来越重要的作用[1],电液复合回馈制动是其中需深入研究的内容之一,其目的是在确保车辆制动稳定性的基础上充分回收制动能量,以提高车辆能量经济性。根据回馈制动和液压制动的分配关系,其分配策略分为叠加式和协调式2种[2-3]。协调式分配策略因其回馈效率高、制动感觉好及制动安全等优势而逐渐成为一种主流方式,其特点是优先使用电机制动力,同时协调控制液压制动力,使液压制动力和电机制动力之和与总制动需求一致[4-6]。在电动汽车制动工况中,影响电液复合制动力分配的特性参数是多方面的[7-8],如车速、电池荷电状态、制动强度等。根据其非线性、时变性的特点[9-10],许多研究者以最优控制器得到预期结果[11-12]。然而,最优控制存在敏感性或稳定性问题[12-13],易陷入局部最优。模糊控制在测量不精确特性变化时具有很强的鲁棒性和自适应能力[14]。对于电液复合回馈制动,利用模糊控制可以表达难以精确定量表达的规则,便于表现不同因素的影响,所以,国内外学者对协调式电液复合制动力的分配,多基于模糊控制[15-17]。模糊控制的控制规则多源于经验分析,很难准确评价特性参数对电液复合制动力分配的影响程度。对某一总体评价指标而言,各个特性参数对其影响权重不一样,即参数灵敏度不一样,这就需要对灵敏度进行分析[18-21]。本文基于电动汽车制动安全性,以制动能量最大化为目的,设计以蓄电池SOC、制动强度、车速为输入,回馈制动比例为输出的电液复合制动力分配模糊控制器,建立电液复合制动力分配模型,在此基础上对影响电液复合回馈制动的主要特性参数灵敏度进行分析,并根据分析结果重新设计电液复合制动力模糊分配规则。
1 制动能量回馈的主要影响因素
1.1 安全制动范围
车辆安全制动范围由I曲线(理想前后轮制动力分配线)、F线(前轮抱死、后轮不抱死时,前、后轮制动力分配曲线)和M曲线(前轮抱死时,最小后轮制动力曲线)构成[22],可用图1中闭合曲线OABCO表示。
1.2 制动过程中能量的利用
电动汽车在制动过程中可利用的制动能量E可表示为[23]
 (1)
(1)
式中:η为机械传动效率;K1为电机发电效率;K2为蓄电池的充电效率;m为汽车质量;v0为制动初速度;v1为制动末速度;Fi为坡道阻力;Ff为滚动阻力;Fw为空气阻力;Fu为机械制动力。
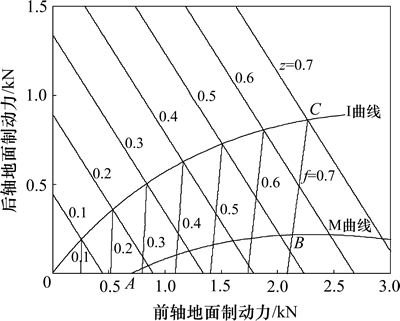
图1 汽车安全制动力范围示意图
Fig. 1 Sketch of safe braking force range
由式(1)可知:影响制动能量回馈的因素有η,K1,K2,m,v和v的变化率。其中,η和m不变,K1与电机再生制动特性有关,K2与电池荷电状态SOC有关,v的变化率与制动强度z有关,因此,z,v和动力电池荷电状态SOC及电机再生制动特性是影响制动能量回馈的主要因素。z,v和SOC 称为特性参数。
1.3 电机回馈制动特性
以无刷直流电机为例,其发电特性与驱动特性基本一样。当电机转速高于额定转速时表现出恒功率特性,低于额定转速时表现出恒转矩特性[23]:
 (2)
(2)
式中:T为制动转矩;Tn为电机额定转矩;nN为额定转速;Pn为电机额定功率;n为电机转速。车辆制动时,随着电机转速降低(低于某一临界速度nH),电枢反电势随之降低,回馈制动效果下降;当电机下降至另一临界速度nL时,再生制动消失[22]。于是,进行如下修正:
 (3)
(3)
式中:Tr为修正后的电机回馈制动转矩; 为修正系数,
为修正系数,
 (4)
(4)
由此可得Tr折算到驱动轮边的制动力F为
 (5)
(5)
式中:ig为主减速器传动比;i0为变速器传动比;r为车轮半径。
2 电液复合制动力模糊分配
设计的电液复合制动力模糊分配总体结构如图2所示。由制动强度计算总需求制动力,在满足制动安全范围的前提下尽量增大分配给前轴(驱动轴)的制动力;以特性参数z,v和SOC为输入,再生制动分配比例Kr为输出,设计模糊控制器,得到受特性参数z,v和SOC约束的可利用再生制动力(简称再生制动力);由电机回馈制动特性折算到驱动轮边的制动力,称为电机制动力;实际电液制动力分配模块比较电机制动力与可利用再生制动力,并取其小者作为前轮再生制动力控制点,同时协调前轮液压制动力。
模糊控制器的详细设计参见文献[23],其中模糊规则见表1。
3 特性参数灵敏度分析
在保证电动汽车制动安全性的前提下,以能量可回收率作为研究电液复合制动力分配的评价指标;通过模糊控制可反映出电液复合制动力分配各特性参数与评价指标的关系,但并不能精确地表述出各特性参数对评价指标的影响权重,因此,有必要对电液复合制动力分配各特性参数灵敏度进行分析。各特性参数如表2所示,其中第3组数据作为参数的基准值。在分析电液复合制动力分配某一特性参数对其评价指标的影响时,其他特性参数保持基准值不变。
针对电动汽车电液复合制动力分配系统(见图2、表1),计算分析制动强度z、车速v及蓄电池荷电状态SOC 对其评价指标的影响。
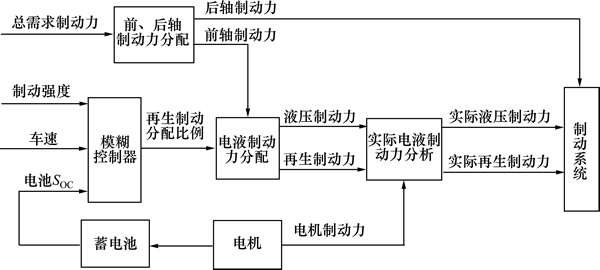
图2 电液复合制动力模糊分配结构
Fig. 2 Structure of fuzzy logic control for electronic-hydraulic-compound braking force distribution
表1 电液复合制动力模糊分配规则
Table 1 Fuzzy control rules of electronic-hydraulic-compound braking force distribution
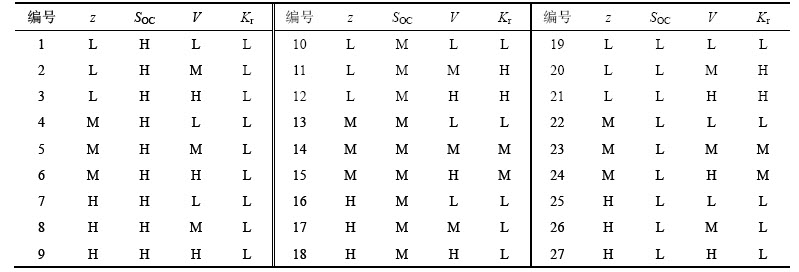
表2 特性参数的取值
Table 2 Range of characteristics parameters

3.1 制动强度的影响
为便于分析制动强度对电动汽车电液复合制动力分配的影响,取z为0.15,0.30,0.45,0.60和0.75,其他特性参数保持基准值不变。图3所示为能量回收率随制动强度变化的影响趋势。
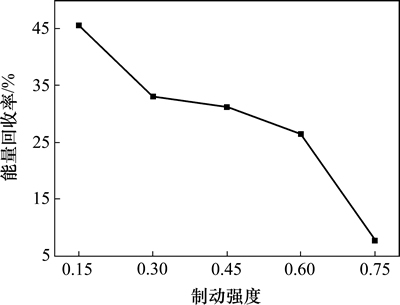
图3 制动强度对能量回收率的影响
Fig. 3 Effect of braking strength on energy recovery
由图3可知:车辆制动能量回收率随制动强度的增大呈减小的趋势;当制动强度较小时,以电机制动为主,制动能量可回收率较高;当制动强度增大时,电机制动力矩无法满足车辆需求制动力矩,液压制动作用变大,制动能量回收率呈减小趋势;当制动强度增大到一定程度时,考虑到车辆的安全性,以液压制动为主,制动能量回收率快速下降。
3.2 车速的影响
取车速 v 为15,30,45,60和75 km/h,而其他特性参数保持基准值不变。图4所示为能量回收率随车速变化的影响趋势。由图4可知:当车速较小时,电机转速低,因此,制动能量回收率低;随着车速增加,制动能量回收率也相应增加,但呈先增大后减小的趋势。
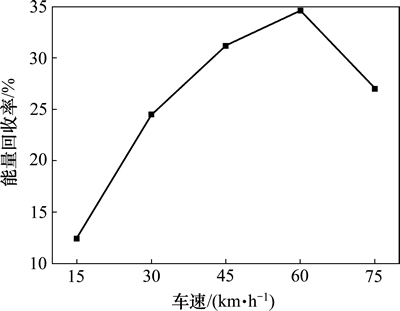
图4 车速对能量回收率的影响
Fig. 4 Effect of vehicle velocity on energy recovery
3.3 SOC的影响
以铅酸电池为例,分析荷电状态对电动汽车电液复合制动力分配的影响,取SOC分别为15%,30%,45%,60%和75%,而其他特性参数保持基准值不变。图5所示为能量回收率随蓄电池荷电状态变化的影响趋势。

图5 SOC对能量回收率的影响
Fig. 5 Effect of SOC on energy recovery
从图5可以看出:随蓄电池荷电状态上升,制动能量回收率呈减小趋势;当SOC较小时,蓄电池内阻较小,可充电效率较大,能量回收率较高;随着SOC增大,蓄电池内阻增大,当SOC 增大到一定程度时,可充电效率显著减小,制动能量回收率明显下降。
3.4 系统灵敏度分析
在分析电液复合制动力分配特性参数对其评价指标影响的基础上,采用扰动法对各特性进行灵敏度分析,表达式如下[24]:
 (6)
(6)
 (7)
(7)
式中:Sxi为变量x在位置Ki处的灵敏度,即SOC,z和v分别在各自的取值点处(表2)对制动能量回收率的灵敏度;Sx为变量x在区间内的灵敏度均方根。根据式(6)和式(7)计算系统的响应灵敏度。计算结果表明:在所选区间范围内对制动能量回收率影响最大的是蓄电池荷电状态,灵敏度为5.74×10-1;其次是制动强度,灵敏度为3.80×10-1;车速对制动能量回收率的影响最小,灵敏度为5.34×10-3。
4 仿真分析
以某前置前驱电动车为基础,构建1辆带有液压制动系统的代步电动汽车,其参数如表3所示。
表3 模拟电动汽车主要参数
Table 3 Specifications of electric vehicle

通过对电液复合制动力分配特性参数灵敏度分析可知,其灵敏度从大至小分别为蓄电池荷电状态、制动强度、车速;根据电液复合制动力分配各特性参数对评价指标的影响程度,重新设计电液复合制动力模糊分配规则,调整车速对能量回收率的影响权重,如表4所示。
据图2,在MATLAB/Simulink中搭建电液复合制动力分配模型,建立电机发电模型和蓄电池模型,采用电流滞环控制模拟电机制动转矩,对电机的回馈制动过程进行仿真分析[25]。设起始蓄电池荷电状态为50%,初始车速为60 km/h,制动工况为以10 (°)/s匀速转动制动踏板直至车速为0 km/h,此工况能遍历0.1到接近0.7的全部制动强度。在2种模糊分配规则下进行仿真,前轴回馈制动力、液压制动力与总制动力的关系如图6所示。
表4 改进的电液复合制动力模糊分配规则
Table 4 Modified fuzzy control rules of electronic-hydraulic-compound braking force distribution
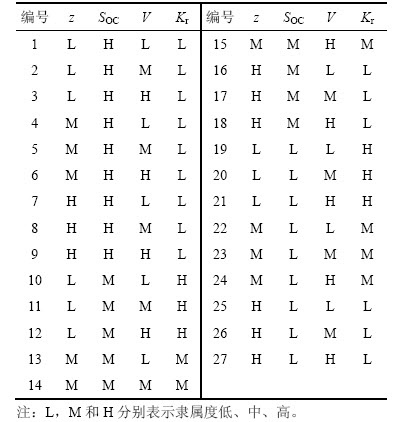

图6 2种分配规则下前轴各制动力的关系
Fig. 6 Relationship between braking forces on front axle under original and modified fuzzy rules
电动汽车速度从60 km/h 减速至0 km/h,消耗的能量为88.9 kJ。按原有的电液复合制动力分配规则经转换计算,可回收的能量为20.3 kJ,可回收能量比达到22.8%;对电液复合制动力分配特性参数进行灵敏度分析并重新设计模糊分配规则,以相同制动工况进行制动,可回收能量为23.5 kJ,较原有模糊规则分别增加3.2 kJ;可回收能量比达26.4%,较原有模糊规则增加3.6%。
5 模拟实验
为验证分配规则的有效性,在电液复合回馈制动模拟试验台上对2种分配规则进行实验。模拟试验台利用缩比原理,其缩比为6,磁粉测功机制动转矩和电机制动转矩分别模拟液压制动和回馈制动,实验台控制系统基于LabVIEW开发[25]。根据缩比原理,实验台所选择无刷直流电机的参数如下:额定功率为3 kW,额定电压为48 V,额定转矩为10.5 N・m,额定转速为2 500 r/min;飞轮惯量为0.751 kg・m2,期望角速度为190 rad/s,模拟车速为60 km/h,总消耗的制动能量 。实验台选择蓄电池为额定电压12 V,容量为20 A・h的4个铅酸电池串联。
。实验台选择蓄电池为额定电压12 V,容量为20 A・h的4个铅酸电池串联。
图7和图8所示分别为原分配规则与改进的分配规则下的模拟实验结果,实验工况与上述仿真工况相同,图中电压信号与所测转矩信号成正比(1 V电压对应的转矩为10 N・m)。
按原有分配规则经转换计算,可回收的能量为15.5 kJ,可回收能量比达到17.4%。按改进的分配规则转换计算,可回收能量为17.9 kJ,较原有模糊规则增加了2.4 kJ,可回收能量比达20.1%,较原有分配规则增加2.7%。
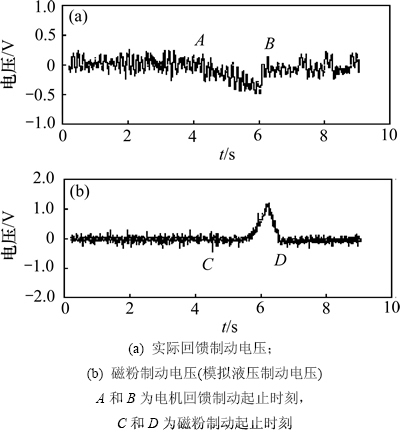
图7 原分配规则下的制动电压
Fig. 7 Braking voltage under previous rules

图8 改进分配规则下的制动电压
Fig. 8 Braking voltage under modified rules
6 结论
1) 通过对电动汽车制动能量回馈过程的分析,确定了约束制动能量回馈的主要特性参数。
2) 蓄电池荷电状态对能量回收率的影响最大,制动强度的影响次之,影响最小的为车速。
3) 相比于原模糊分配规则,可回收的制动能量增加了3.2 kJ,可回收能量比增加3.6%。
4) 改进的分配规则与原分配规则相比,可回收的制动能量增加2.4 kJ,可回收能量比增加2.7%,改进的分配规则是有效的。实验达到的可回收制动能量比与仿真结果相比降低6.3%,这主要与台架效率有关。
参考文献:
[1] AJANOVIC A. The future of electric vehicles: prospects and impediments[J]. WIREs Energy Environment, 2015, 4(6): 521-536.
[2] ABADIAS R, ABBAS T, ALIU O G, et al. Electric vehicle collaboration toyota motor corporation and tesla[J]. IEEE Vehicle Technology, 2013, 8(4): 4-9.
[3] YEO H, HWANG S H, KIM H S. Regenerative braking algorithm for a hybrid electric vehicle with CVT ratio control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Automobile Engineering, 2006, 220(11): 1589-1600.
[4] SASAKI Y, MTOMO A, KAWAHATA F.Toyota braking system for hybrid vehicle with regenerative system[C]// Proceedings of the 14th International Electric Vehicle Symposium. Lorida, 1997: 231-234.
[5] ZHANG Junzhi, KONG Decong, L Chen, et al. Optimization of control strategy for regenerative braking of an electrified bus equipped with an anti-lock braking system[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Automobile Engineering, 2012, 226(4): 494-506.
Chen, et al. Optimization of control strategy for regenerative braking of an electrified bus equipped with an anti-lock braking system[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Automobile Engineering, 2012, 226(4): 494-506.
[6] KO J W, KO S Y, KIM I S, et al. Co-operative control for regenerative braking and friction braking to increase energy recovery without wheel lock[J]. International Journal of Automotive Technology, 2014, 15(2): 253-262.
[7] ZHANG Junzhi, L Chen, GOU Jinfang, et al. Cooperative control of regenerative braking and hydraulic braking of an electrified passenger car[J]. Journal of Automobile Engineering, 2012, 226(10): 1289-1302.
[8] SHEN Wenchen, HU Yuhui, XI Junqiang. Regenerative braking control for hybrid electric vehicles under decelerating condition[J]. Journal of Beijing Institute of Technology, 2014, 23(4): 463-468.
[9] GONG Qiuming, LI Yaoyu, PENG Zhongren. Trip-based optimal power management of plug-in hybrid electric vehicles[J]. IEEE Transactions on Vehicle Technology, 2008, 57(6): 3393-3401.
[10] WIRASINGHA S G, EMADI A. Classification and review of control strategies for plug-in hybrid electric vehicles[J]. IEEE Transactions on Vehicle Technology, 2011, 60(1): 111-122.
[11] LIAN Yufeng, TIAN Yantao, HU Lelei, et al. A new braking force distribution strategy for electric vehicle based on regenerative braking strength continuity[J]. Journal of Central South University, 2013, 20(12): 3481-3489.
[12] CHEN Ming, GUO Lixin. The parameters sensitivity analysis of battery electric vehicle dynamic performance[J]. Applied Mechanics and Materials, 2011, 80/81: 837-840.
[13] LEI Zhenyu, CHEN Qiu. A new approach to fuzzy finite element analysis[J]. Computer Methods in Applied Mechanics and Engineering, 2002, 191(45): 5113-5118.
[14] LI Hongxing, WANG Jiayin, MIAO Zhihong. Modelling on fuzzy control systems[J]. Science China Mathematics, 2002, 45(12): 1506-1517.
[15] 刘辉, 王伟达, 何娇, 等. 基于模糊控制的混合动力电动车再生制动系统的建模与仿真[J]. 汽车工程, 2012, 34(1): 51-56.
LIU Hui, WANG Weida, HE Jiao, et al. Modeling and simulation of the regenerative braking system in a HEV based on fuzzy control[J]. Automotive Engineering, 2012, 34(1): 51-56.
[16] PENG Dong, ZHANG Yi, YIN Chengliang, et al. Combined control of a regenerative braking and antilock braking system for hybrid electric vehicles[J]. International Journal of Automotive Technology, 2008, 9(6): 749-757.
[17] HERRERA V, MILO A, GAZTANAGA H. Adaptive energy management strategy and optimal sizing applied on a battery-supercapacitor based tramway[J]. Applied Energy, 2016, 169: 831-845.
[18] 何红妮, 吕震宙. 模糊随机可靠性灵敏度分析方法[J]. 航空学报, 2008, 29(2): 338-345.
HE Hongni, L Zhenzhou. Sensitivity analysis for fuzzy random reliability[J]. Acta Aeronautica Et Astronautica Sinica, 2008, 29(2): 338-345.
[19] MATHEYS J, AUTENBOER W V, TIMMERMANS J M, et al. Influence of functional unit on the life cycle assessment of traction batteries[J]. International Journal of Life Cycle Assessment, 2007, 12(3): 191-196.
[20] CHEN Ming, GUO Lixing. The parameters sensitivity analysis of battery electric vehicle energy consumption economy[J]. Advanced Materials Research, 2011(308/309/310): 1724-1727.
[21] RAHMAN Z, EHSANI M, BUTLER K. An investigation of electric motor drive characteristics for EV and HEV propulsion systems[J]. Society of Automotive Engineers Journal, 2000(8): 43-50.
[22] 刘志强, 过学迅. 纯电动汽车电液复合再生制动控制[J]. 中南大学学报(自然科学版), 2011, 42(9): 2687-2691.
LIU Zhiqiang, GUO Xuexun. Electronic-hydraulic-compound regenerative braking control for electric vehicles[J]. Journal of Central South University (Science and Technology), 2011, 42(9): 2687-2691.
[23] 刘志强, 汪浩磊, 杜荣华, 等. 纯电动汽车电液复合回馈制动研究[J]. 汽车工程, 2016, 38(8): 955-960.
LIU Zhiqiang, WANG Haolei, DU Ronghua, et al. A research on electronic-hydraulic-compound regenerative braking for battery electric vehicle[J]. Automobile Engineering, 2016, 38(8): 955-960.
[24] 鲁超, 谭迪, 刚宪约. 轮毂电机驱动电动汽车耦合动力学特性参数灵敏度分析[J]. 科学技术与工程, 2015, 15(28): 78-86.
LU Chao, TAN Di, GANG Xianyue. Sensitivity analysis of coupling dynamic characteristic parameters of wheel motor drive electric vehicle[J]. Science Technology and Engineering, 2015, 15(28): 78-86.
[25] 汪浩磊. 电动汽车机电复合回馈制动研究[D]. 长沙: 长沙理工大学汽车与机械工程学院, 2015: 39-53.
WANG Haolei. Research on electronic-mechanical-compound regenerative braking for electric vehicles[D]. Changsha: Changsha University of Science and Technology. School of Automobile and Mechanical Engineering, 2015: 39-53.
(编辑 陈灿华)
收稿日期:2016-02-12;修回日期:2016-04-24
基金项目(Foundation item):国家自然科学基金资助项目(11572055);交通运输部基础应用研究项目(2013319825090);长沙市科技局项目(K1301006-11) (Project(11572055) supported by the National Natural Science Foundation of China; Project(2013319825090) supported by the Ministry Transport of China; Project(K1301006-11) supported by the Science and Technology Bureau of Changsha)
通信作者:刘志强,博士,副教授,从事内燃机节能及电动汽车研究;E-mail: lzq0228@126.com

