�������ֻ�������������ѧģ�ʹ����㷨
�ƽ�Ԫ�����𰲣�����Ȫ
(���ϴ�ѧ ���繤��ѧԺ���ִ�����װ������뼫������������ص�ʵ���ң����� ��ɳ��410083)
ժҪ���о��������ֻ�������������ѧģ�ʹ������㷨��ͨ���ռ��˶���Чת�����õ�˫������ּӹ��ɻ�е�ͻ�����������������ת���Ľ����ʽ����������ּ�����ϻ�������ķ������˶����̣��Ƶ�����������������ӵĹ��շ�����HFT (Hypoid format tilt)�ӹ��������������ֻ�������������ѧģ�͡������������˶������ڻ�������ϵ����������˫������ֳ�����GLEASON��˾�����۳�����бȽϣ�ͨ���Ա���֤����������ѧģ�͵�ȷ���뾫�ȡ��о��������������������������ֻ�������������ѧģ�ʹ������㷨ԭ����ȷ��ת�����ȸߡ�
�ؼ��ʣ��������֣������������ػ������˶�ѧ��Чת��ԭ����������ּ���
��ͼ����ţ�TH132 ���ױ�־�룺A ���±�ţ�1672-7207(2011)10-3033-07
Mathematical model of kinematics transformation for five-axis linkage CNC hypoid generator
TANG Jin-yuan, NIE Jin-an, WANG Zhi-quan
(Key Laboratory of Modern Complex Equipment Design and Extreme Manufacturing,
Ministry of Education, School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: Based on the spiral bevel gear spatial kinematics equivalent transform theory, in order to redisplay the traditional machine manufacturing process in free-form machine, a new algorithm resolving the analytical solution formulas of five-axle linkage transformation equations was developed. Nonlinear items of five-axle linkage equations were approximately represented with Maclaurin series. A virtual gear, which is made by the simulation software with the conducted five-axle linkag equations, was compared to the theoretical discrete points computed by GLEASON corporation, with a set of HFT parameters to verify the transformation precision. The results show that the proposed new method for developing spiral bevel gear machine tool five-axis equations is correct, simple in calculation, and has high precision.
Key words: spiral bevel gear; five-axle linkage CNC hypoid generator; spatial kinematics equivalent transform theory; Maclaurin series
��еʽ�������ּӹ������ṹ���ӣ������������ߣ�������Ϊ��е���������ȵȼ��͡����������ͻ������е�ͻ�����ȣ����������С���ӹ�������ߣ��ɲ�������ǿ�����������ͻ�������������������ϻ�е�͵�ҡ̨�˶��͵��㵶ת���˶��仯��ʵ����ȫ���ؿ���[1]�������ӵļӹ��˶�ͨ���������������ʵ�֣�����˿��ƾ�����ӹ����ȡ�Ŀǰ��������ѧ�߶�2���������ּӹ��������˶�ת����ϵ�������о���Goldrich[2]����˻�еʽ���������������ͻ����ĵ�Чת��˼�룬���ڿ��ǵ���ҵ����û�и����κ�ת����ʽ�ͼ��㷽����Litvin��[3]���������2�ֻ�������ϵʹ2�ֻ����˶���ϵ��ȫ��Ч��ԭ������û�и��������˶����̵�����㷨�������[4]�ڳ���ο������ת����ͨ���߽��ϼ��ٶȷ����о��˻�е�������������ͻ�����ģ��ת�����⣻κ������[5]��litvin�������Ƶ��˻�е�������������ͻ�������ʽת����ʽ�����˷��������㵶ת��ֱ��չ�ɷ���Ч�����ڵ��㷨�Ļ�е�������������ͻ�����ת����չ�ɷ�Ҫ���ѵöࣻ������[6]�̳�����[4]��˼���뷽������ʸ����ת������ͨ�����������۶�������ּ����еĵ������н��������������Ƶõ����㷨�ӹ�ʱ������˶����̡����ַ���������Ҫ��ת�������еĵ������н�����⣬�����ϴ���ԭ������ת���ľ����ܵ�Ӱ�졣����������Litvin����Ϊ�����㣬�����˶���Ч��λ�õ�Чԭ���������ӻ�е�͵����������ͻ�������ѧת��ģ�ͣ��õ�һ�����������ͻ�������ķ������˶����̣�ͨ��������ּ�����ϻ�������ķ������˶����̣�����Ϲ�����ֱ����ȡ������ּ����еĵ�������յõ������˶����̵Ķ���ʽ��ʽ��ת�����ȿ��Ը��ݶ���ʽ�״ο��ơ�
1 2������ӹ�����������ת��ԭ��
���гݹ����У�������1��ƽ�����������ҡ̨ͬ�ģ���ͨ������ҡ̨��ת�����뱻�г��ֽ�����϶���ϡ��ü���ƽ�����ֵ��ֳݱ�����ϳ���̵�Ƭ�����������ҡ̨�˶��Ĺ켣���������棬������˶������У���������ƽ�������ֳݵĵ�Ƭ�����о��ڱ��г��ֵ����������г�����[7]��
һ������˶���ϵ�Dz���������������ּ�����������˶��IJο�ϵ�����ڵ�[8]������ͬ�ӹ�ԭ�����еĸ������ػ������������ּӹ��˶���Ϊ��ʵ�ָ�����˶���ʹ�����������Է��ϼӹ�ԭ�����˶��������������˶���
2�������ת��ԭ��(����֤���ߺ�����������ʱ�̵����λ�˺㶨) [9]��ͼ1��ʾ�������б�֤�������ߺ���������������ʱ�̵ļнǺ̶���֮��ij���ʸ����ȡ�
 (1)
(1)
 (2)
(2)
ʽ�У�LptΪ���St��Sp����ת�任����(opot)pΪ�����ύ���㵽������������������ϵ�µ�ʸ�����ȣ��ϱ�C��G�ֱ�����������������ӹ����̺ͻ�е�ͼӹ�С�ֵ�չ�ɹ��̣��±�p��t��������ϵ��ʽ(1)��֤��2�ֵ�������ڹ����˶���̬��ͬ��ʽ(2)��֤�����ߵ����λ����ͬ��
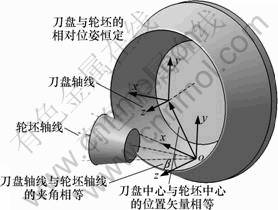
ͼ1 2�����ͻ�����ת��ԭ��
Fig.1 Transform theory between two machines
2 ��еʽ��������ѧģ��
��ͳҡ̨�����ṹ��ͼ2��ʾ�����������ʮ�ָ��ӡ��ӹ�����ϵ��ͼ3��ʾ[10]�����У�So(xo��yo��zo)Ϊ�봲������������ϵ��Sc(xc��yc��zc)Ϊ��ҡ̨����������ϵ����ԭ��Ϊҡ̨���ģ�Sp(xb��yb��zb)Ϊ�뵶�̹���������ϵ��Sp(xp��yp��zp)Ϊ�빤������������ϵ��Se(xe��ye��ze)Ϊ�빤�������������ϵ��Sn(xn��yn��zn)Ϊ�봲������������ϵ����ԭ��On��So��������(0��-Em��Xb)����ʾ��Sq(xq��yq��zq)�ǹ�������ϵ��������������Snƽ�У���ԭ��Oq��Sn��������(X1��0��0)����ʾ��Sc��zc��1��ת��q��Sp��xp��1��ת��fp��Se��ye��1��ת��rm��qΪ����λ��iΪ�ܵ���ǣ�jΪ������ת�ǣ�EmΪ��ֱ��λ��SdΪ����λ��rmΪ��װ���ǣ�X1Ϊˮƽ��λ��XbΪ��λ��CΪ��������(������ת������ƽ��Ľ���)��������������Ϊ�������ּӹ��Ļ�����������������ӵĵ��㷨�ӹ�С��Ϊ����������ֵ����1��

ͼ2 ��ͳ��еʽҡ̨�ͻ������˶�����
Fig.2 Conventional machines consisted of many components
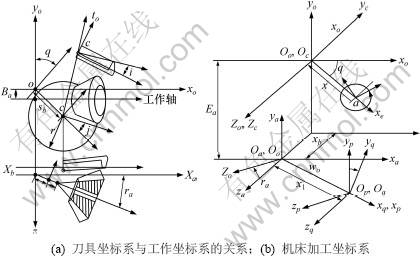
ͼ3 ��еʽҡ̨�����ӹ�����ϵ
Fig.3 Coordinate systems for mechanical machine
�ɴ�ͳҡ̨ʽ�����ӹ����������ļ��㣬���Խ������¸�ʸ���ı���ʽ��
 (3)
(3)
ʽ�У�tnΪ������ת�ᵥλʸ��������������C��ָ�����ⲿ��wΪ������ת�ᵥλʸ����ָ��Զ��������
��Descartes����任���ɵõ���������ϵ����������ϵ�ı任�����ɵõ� ��
�� �����У���k������ͳ����������������������ֵ����1��
�����У���k������ͳ����������������������ֵ����1��
��1��3����ת�任������Ԫ�����£�
 (4)
(4)




 (5)
(5)
ʽ�У�cos=c��sin=s��q=��0+wc��t��fp=i01��wc��t����0Ϊ��ʼҡ̨�ǣ�wcΪҡ̨���ٶȣ�i01Ϊ���ȡ�
3 ����������������ѧģ��
��������������6������ʵ���˳��ּӹ���ȫ���˶��������ṹ��ͼ4(a)��ʾ��3��ƽ����(X��Y��Z) ��3��ת����(A��B��C)���ṩ6�����ɶȣ������ؿ��ƹ����뵶���ڿռ��е�λ�ú��˶���
���Ƚ�����ͼ4(b)��ʾ��һ������ϵ[11]��Sf(Xf��Yf��Zf) �봲����������St(xt��yt��zt)��Sp(xt��yt��zt)�ֱ��뵶�̡�����������Sh��Sm��Sfƽ�У��ֱ���Y����̨���Z����̨�������Shԭ��oh��Sf�е�λ�ã�������(x��y��0)��ʾ������X��Y���ɶȣ�Smԭ��om��Sf�е�λ��������(0��0��z)��ʾ������Z���ɶȣ�St��������zhת��(��C��ת���ɶ�)ת��c��Se��ת̨����������ym����һת��b(��B��ת���ɶ�)��SdΪ��������ϵ��Se������ƽ�У�ԭ��odλ����L(��Ӧ��еʽҡ̨�����е�ˮƽ��λ)ȷ����Sp��xd������ת(��A��ת���ɶ�)��ת��Ϊa��ͨ������任���ɵõ� ��
�� ��
��
PHOENIX I�������������ػ������������˶�ת���������£�
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
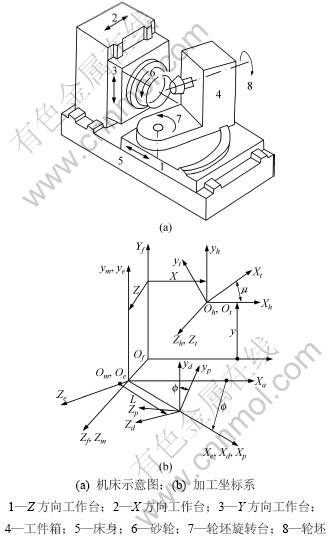
ͼ4 PHOENIX I���������������ӹ�����ϵ
Fig.4 Coordinate systems for PHOENIX I Machine
��PHOENIX I�ͻ�������ϵ�µ��̵���������ϵ��ת���������£�
 (6)
(6)
���ڵ��ߵ���������ϵ��ת��������Ա�ʾΪ��
 (7)
(7)
���нǶ���ת�仯����ͳ���ʸ��Ϊ��
 (8)
(8)

 (9)
(9)
4 ��ͬ�ӹ��������������������˶����������
��ʽ(1)֪ʽ(4)��(8)��Ӧ������Ԫ����ȣ���ʽ(2)֪ʽ(5)��(9)��Ӧ������Ԫ����ȣ������ ���ǹ���t�ĺ�����
���ǹ���t�ĺ�����
(1)�����㵶ת��i=0��j=0ʱ����Phoenix I���˶��������£�
 (10)
(10)
(2) ���ñ��Է��ӹ�ʱ�����ı�2����֮��ı�����ϵ��ͨ���������ȣ�ʹ�������ֵĴ����������Ԥ����Ƶĸ߽��δ���������ߡ���������£����ı�fp��t֮��ı�����ϵ����fp����ʽ(10)���ɡ�
(3) �����е��㵶ת�Ǽӹ���������ʱ��ͨ�����2�ֻ�������ϵ��ø����˶����̵Ľ����⣬��ʽ(11)��ʾ��
 (11)
(11)
ͨ��һ��������ּ�������������ʽ����ʽ(12)��������ý��ƵĶ���ʽ������ʽ�������״�n��ѡȡ�������辫��ȷ����t=0ʱ�̱�ʾ����λ�ڳ�ʼҡ̨��λ�á�
 (12)
(12)
5 ʵ������
����������ѧģ���Ǹ����������ۺ����Ӧ�ļӹ������������ġ��ӽ�����ѧģ�͵ĽǶ������ǣ�����С�ֲ��õ��㷨�ӹ������ij�����ѧģ�ͣ�������Ϊ���ֺ�С�ֵ�ͨ����ѧģ�ͣ������ӹ���������ѧģ�Ϳ��Կ��������������罫���㷨������������ѧģ���е���б�Ǻ͵�ת������Ϊ0�㣬�ɿ�����չ�ɷ��ӹ����ֵ���ѧģ�ͣ���С�ֶԴ��ֵ�ƫ�þ���Ϊ0 mm����˫�������ʵ���Ͼͱ���˻������֣��������������ѧģ���й���Ϊ0���ͳ��˴��ֳ��η��ӹ���
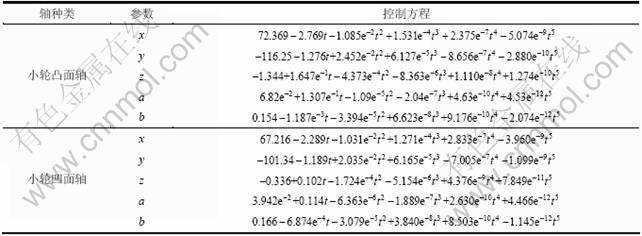
������ij˫������ָ���С��Ϊ�����ñ��ķ��������㷨��������ת��Ϊ���������ͻ��������˶����̡����ָ��ĵ��㷨������������1��ת�������������������᷽�̼���2��ת������ȡ10-3��
��1 ��������������������(HFT������)
Table 1 Parameters and installment settings of pinion (HFT)

��2 ���I�����ػ����ӹ�С�ָ�������Ʒ���
Table 2 Motions of Gleason PHOENIX I machine axes
�æȴ��������빤����ʸ�������̬(�н�)�����ڴ�ͳ����ϵ�У�����ʽ(3)�е������빤����ĵ��������ڷ��һ����������B�����ʽ������нǦ��ڻ�е�ͻ�������ϵ�ͷ��һ����������ϵ�е����ұ仯�������ֵ��ͼ5��ʾ��
��ͼ5���Կ�����������2�ֻ�������ϵ�£��������������غϡ����������ֵ�1���ӹ������ڣ��������ߵIJ�ֵ��10-3����(��ʱ������ּ����Ľ״�n=5)��ԶС�ڻ����������˶���
����ʸ�� ��1���ӹ���������2�ֻ�������ϵ�µ�ʸ����ֵ��ͼ6����ͼ6��֪������������10-8 mm���ڣ�ת�����ȸߡ�
��1���ӹ���������2�ֻ�������ϵ�µ�ʸ����ֵ��ͼ6����ͼ6��֪������������10-8 mm���ڣ�ת�����ȸߡ�
ͨ�����������ߺͲ�ͬ��������ϵ�г���ʸ����ֵ��֪����Ľ���ģ����ȫ�����������ֵĸ߾��ȼӹ���������GLEASON��˾����������Ϊ������ת�����Ƚ��н�һ����֤��
�������õ��ķ��I�����ػ����ĸ�������Ʒ��̣����ݱ�������ij����������췽��[12]������������ϵͳ�п��Լӹ���1�������С����(��ͼ7)��ͨ��GLEASON��˾������������������ӹ����ֵ����۳��棬���ո���ɭ����ȫ��������[13]��ѡȡ��ͼ7��ʾ��45���㣬����������ģ�������۳���IJ�����[14]����ͼ8��ʾ����ͼ8�ɼ�����n=5ʱ�����ĵĽ���ģ�������۳����ڳ��淨ʸ�����ƫ���ڡ�1.5��10-4 mm���ڡ���ʵ�ʼӹ��У����������������10 ��m���ң����ĵ�ת��ģ�Ͷ��������ֵij��������������������Ժ��ԣ���ˣ����������ֵ�ʵ�ʼӹ��ͳ��������У����������ת��ģ������Ч�ġ�
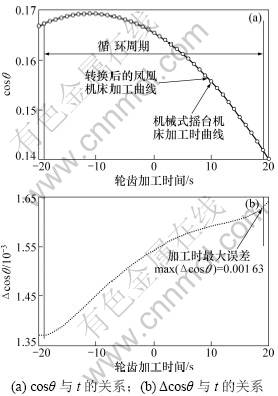
ͼ5 ��ͬ��������ϵ�ЦȽ���������
Fig.5 Transformation error of angle between two machines
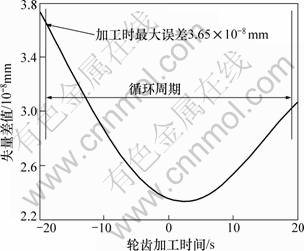
ͼ6 ��ͬ��������ϵ�г���ʸ��(opot)p��ֵ
Fig.6 Transformation error of vetor between two machines
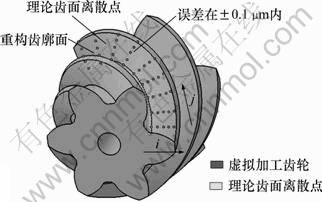
ͼ7 ��������С�������۵�ıȽ�
Fig.7 Flank topographic deviations derived by comparing theoretical teeth-surface and virus manufacturing pinion
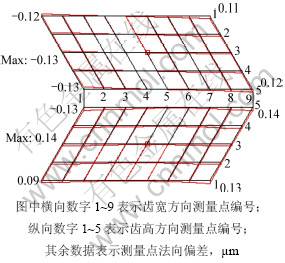
ͼ8 ȫ���淨��������
Fig.8 Flank form errors analysis
6 ����
(1) ͨ��������ּ�����ϻ�������ķ������˶����̣�����Ϲ�����ֱ����ȡ������ּ����еĵ�������յõ������˶����̵Ķ���ʽ��ʽ��ת�����ȿ��Ը��ݶ���ʽ�״ο��ơ�������ķ������������з������ڵ�ԭ������
(2) �����ӻ�еʽҡ̨�����������������ػ�����������������ģ�����ɷ������÷������о��ȸߡ��ɲ�����ǿ���ص㡣ͨ��ʵ�������������֤�������������Ŀ���������ȷ�ԣ�Ϊ�����������ֻ������ṩ�˻���������
�ο����ף�
[1] ����, �á��¸�. ����ɭר������ϵͳ(GEMS)�����������ּ�˫����������ֻ������¼�Ԫ[J]. �������켼����װ���г�, 2005, 79(4): 87-93.
FAN Qi, Dafoe R. Gleason expert manufacturing system (GEMS) opens a new era for digitized manufacturing of spiral bevel and hypoid gears[J]. World Manufacturing Engineering & Market (WMEN), 2005, 79(4): 87-93.
[2] Goldrich R. Theory of 6-axis CNC generation of spiral bevel and hypoid gears[R]. New York: The Gleason Works, 1989: 23-30.
[3] Litvin F, Chen N, Nag U. Generation of gear tooth surfaces by application of CNC machines[R]. Chicago: University of Illinois at Chicago, 1994: 20-35.
[4] ����, ������. �����ͻ�����������ת��Ϊ Free-Form �ͻ�������������ԭ��[J]. ��е��ѧ�뼼��, 2000, 19(5): 782-784.
ZHANG Yan-hong, WU Lian-ying. On the theory of transformation machine setting parameters from cutter-tilt milling machine to Free-Form milling machine[J]. Mechanical Science and Technology, 2000, 19(5): 782-784.
[5] κ����, �ζ���, ���ڵ�, ��. ��ͳ���������������ͻ����˶��ĵ�Чת��[J]. ��е��ѧ�뼼��, 2004, 23(4): 425-428.
WEI Bin-yang, REN Dong-feng, FANG Zong-de, et al. Study on kinematic equivalent transformation from traditional machine tools to five-axis linkage ones[J]. Mechanical Science and Technology, 2004, 23(4): 425-428.
[6] ����, ��̫��, �ެB, ��. ������չ�ɷ����˶�ѧת�����㷨������[J]. ��е����ѧ��, 2008, 44(3): 123-129.
ZHANG Wei, WANG Tai-yong, LUO Jun, et al. Kinematics transformation for tilt generated method and simulation[J]. Chinese Journal of Mechanical Engineering, 2008, 44(3): 123-129.
[7] Shih Y, Fong Z, Lin G. Mathematical model for a universal face hobbing hypoid gear generator[J]. Journal of Mechanical Design, 2007, 129(1): 38-47.
[8] ������, ������, ������, ��. �����˼�������[M]. �人: ����������ѧ������, 1996: 25-35.
XIONG You-lun, TANG Li-xin, LIU En-cang, et al. Foundation of robot technology[M]. Wuhan: Huazhong University of Science and Technology Press, 1996: 25-35.
[9] Litvin F, Fuentes A. Gear geometry and applied theory [M]. London: United Kingdom Cambridge University Press, 2004: 83-150.
[10] Stardtfeld H J. Handbook of bevel and hypoid gear[M]. New York: Rochester Institute of Technology Press, 1993: 190-200.
[11] FAN Q. Computerized modeling and simulation of spiral bevel and hypoid gears manufactured by gleason face hobbing process[J]. Journal of Mechanical Design, 2006, 128(6): 1315-1327.
[12] ��̫ƽ, �ƽ�Ԫ. ���� CATIA V5 ��Բ����������ӹ��о�[J]. ϵͳ����ѧ��, 2008, 20(16): 4339-4343.
PU Tai-ping, TANG Jin-yuan. Virtual machining process research of spur-gear based on CATIA V5[J]. Journal of System Simulation, 2008, 20(16): 4339-4343.
[13] Stadtfeld H. Advanced bevel gear technology[R]. New York: The Gleason Works, 2000: 20-30.
[14] ����, ��С��, ����, ��. �������ֳ�������������[J]. ��е����ѧ��, 2003, 39(6): 151-154.
WANG Jun, WANG Xiao-chun, JIANG Hong, et al. Coordinate measurement of tooth surface of spiral bevel gear[J]. Chinese Journal of Mechanical Engineering, 2003, 39(6): 151-154.
(�༭ �²ӻ�)
�ո����ڣ�2010-11-11�������ڣ�2011-03-05
������Ŀ�������ص�����о���չ�滮(��973���ƻ�)��Ŀ(2005CB724100)��������Ȼ��ѧ����������Ŀ(50875263)
ͨ�����ߣ��ƽ�Ԫ(1962-)���У����������ˣ����ڣ����´�������ѧ�����ֻ������ϵͳ����ѧ�о����绰��13017390263��E-mail��jytangcsu@163.com

