�������Բ���·����˫�㲽�л����˲�̬��������
½���ţ��½������볯��Ф���ͣ��쿡������
(�人��ѧ �������еѧԺ������ �人��430072)
ժҪ������������-����·����ĸ������ģ�ͣ�����·�������Ի����˲�̬������Ӱ����ɡ����ȣ����û�����Ȼ�����ص�(ZMP)�켣�IJ�̬�滮������ͨ�������ο�ZMP�켣��ȡ���������Ĺ켣����ֵ�õ��������ڸ���·���µIJ�̬����Σ�����Pasternak�ػ�ģ�ͣ���ANSYS�н�����·�Ķ������ģ�ͣ�����ADAMS��������˶����ģ����ϡ�ͨ��3�����Բ������������·������µIJ��з��棬������������Բ����Ի�����������ZMP�켣���ؽ��������صȲ�����Ӱ�졣�о���������������������Եػ���·�ϲ���ʱ���ĸ߶ȱȽ��ȶ�������С��2.6%��������ǰ�������ƶ�����ӽ�Ԥ�ڹ滮�IJ��о��룬�ȸ���·�������µIJ���Ч�ʸߣ��������ر仯���������·���仯���ƻ���һ�£�����֧������Ӧ�ؽڵ���������ͻ���ֵ����8.3%~33.4%���ؽ��˶���ƽ�ȣ���Ӵ����ϸ���·��������Χ����7.2%~16.7%������Ի����˵ij������Լ8.0%������Ȼ���Ե��滷���У�˫�㲽�л����˵IJ�̬Ч�ʸ��ߣ��˶���ƽ�ȡ�
�ؼ��ʣ�˫�㲽�л����ˣ���̬�滮������·����Pasternakģ�ͣ���-�����
��ͼ����ţ�TM8�� TM113 ���ױ�־�룺A ���±�ţ�1672-7207(2014)10-3443-07
Gait parameters analysis of biped walking robot based on flexible walking path
LU Rongxin, CHEN Jianfang, FENG Zhao, XIAO Xiaohui, XU Jun, WU Yi
(College of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Abstract: A rigid-flexible coupling model between biped robot and its walking path was established to analyze the influence of path parameters on gait parameters. Firstly, with the method of gait planning based on natural ZMP trajectory, robot centric track was obtained by setting reference of ZMP trajectory, and then the gait on a rigid path was acquired by interpolation. Secondly, multilayer flexible model of road was established in ANSYS software based on Pasternak foundation model to be exported to ADAMS and coupled with the robot multi-rigid-body model, then the effect on mass trajectory, centric trajectory and driving torque of joint from flexibility data of ground were analyzed by simulating the robot walking in three groups of flexible surface and one ideal rigid surface. The results show that the height of mass center is more stable with fluctuation being less than 2.6%, moving distance along the forward direction is much closer to prospective walking distance and the walking efficiency on a flexible path is higher than that on a rigid path. Although the trend of driving torque is similar to that in a rigid path, its mutation peak in the joints on supporting leg is reduced by 8.3%-33.4%, and so the joint can move more steadily. Moreover, the fluctuation range of pelma contact force is 7.2%-16.7% more than that in the rigid path, and the impact from the ground upon the robot is reduced by 8.0%, which indicates that the biped robot is capable of walking most efficiently in natural ground environment.
Key words: biped robot; gait planning; flexible path; Pasternak model; rigid-flexible coupling
���л���������Ȼ��ʵ�����еIJ�̬�ȶ��ԺͲ���Ч����������Ӧ�õĹؼ�֮һ����̬�ǻ����˲��й����и��ؽ���ʱ��Ϳռ��ϵ�Э����ϵ����˫�㲽�л������ȶ����еĻ�����Ȼ����Ŀǰ���Ƕ���˫�㲽�л����˵��˶��滮����Ǽ������Ϊ������ԣ������˲���·����𤵯�ԶԻ����˲�̬������Ӱ�졣˫������˲�̬�滮������Ҫ��2�ࣺ�������ಽ������(HMCD)�ķ�������[1]�ͻ����ȶ��ԵĹ滮��������������͵��ǻ���������(zero-moment point�����ZMP)�ȶ��оݵIJ�̬�滮����[2]��Dasgupta[3]���û���ZMP�ķ������в�̬�滮�о�����־����[4]�����˻���ZMP�оݵĻ����˲���ģʽ�벽̬�滮�о����������Ȼ���滷���µIJ������⣬Kajita��[5]�о���ƽ�������˫�㲽�л����˶�̬���п��ƣ��������Ե�����ģ�ͼ������غ��������ȫ�ֱ�����Fujimoto��[6]ͨ����ưڶ����˫�㲽�л��������Ĺ켣��ⲽ̬����˫�㲽�л����˵����Ŀ��������Ե����ڣ��ڶ���ĩ�˵��˶��켣������2������ʱ�����ص��ƽ����������ʾ�������Ϲ����������˲���·�������ԡ���Ի���������ҵ·�������϶���ѧ��������������[7]�о���ɳ�ز��л����˵��������ּ�����װ�ã�����˸��Ժ����Ե��л�����Ǻ����ķ���������Lacagnina��[8]�Ի�ɽ̽������˵Ķ��嶯��ѧ���棬������6��������������Ӵ�������ԡ�Xiao��[9]�о�����ʽ����������������ҵ����������������ϡ���̬����ʱ�����Լܿյ�����϶���ѧ���ԡ��ɼ����������о�˫�㲽�л����˲�̬�滮�붯��ѧʱ����δϵͳ��������𤵯�ԶԻ����˹ؽڵĶ�̬��Ӧ���ԺͲ����ȶ��Ե�Ӱ�죬Ϊ�ˣ����������о����ǵ������ԵIJ���·��ģ�ͣ�����������-�����ĸ������ģ�ͣ���������·�������Բ����Ի����˲���ʱ�Ĺؽڶ�̬��Ӧ���ԡ����Ĺ켣����̬�ȶ��Ե�Ӱ����ɡ�
1 ���ڸ���·�������˫�㲽�л����˲�̬�滮
�ȶ�������˫�㲽�л�����ִ�и�����ҵ�����ǰ�����������о���Ȼ���滷���µIJ�̬�滮֮ǰ���ȼ��貽�е���Ϊ������ԣ�������Ϊ����壬����Takanishi��[10]����Ļ�������ZMP�ķ�������˫�㲽�л����˲�̬�滮��
1.1 ����ZMP�оݵ�˫�㲽�в�̬�滮����˼��
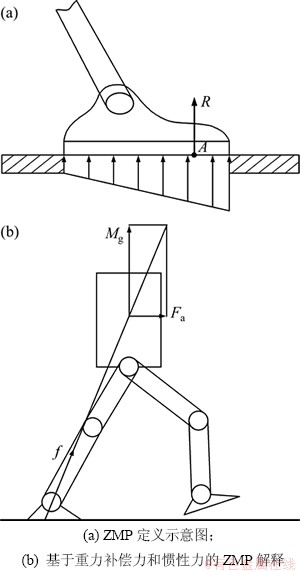
ZMP���ͼ1��ZMP�����Vukobratovic�����[12]��ָ��������ֲ��ķ�����Ч����Rͨ��������õ�(��ͼ1(a)��A��)���������˵�����������Mg������Fa���ߺ��������Ľ���[11](��ͼ1(b))��
������������������нӴ������С����������Ϊ֧�Ŷ���Σ���ͼ 2�еĻ�ɫ������֧����ʱΪ�������ƣ�˫��֧����ʱΪ 2ֻ֧����Ӵ�������Ե�ֲ��ĵ�Χ�ɵ��������Σ�����ѧ�϶���Ϊ��Щ�Ӵ��㼯�ϵ���С���������ڸ��ٲ���ʱ��������ʹ������������ˮƽ���ͶӰ��ZMP����ʼ���غϣ�����ʱ����ZMP��֧�Ŷ����֮�ڣ���֧����������汣����Ծ�ֹ�������ܷ�����ת��ʧ�����������ZMP�ȶ��о�[2]����ZMP��֧�Ŷ���α߽����̾�����Ϊϵͳ���ȶ�ԣ�ȡ�
˫�㲽�л����˵IJ�̬�滮��Ϊ�滮���й����еĸ��ؽ��˶��켣�����������ʱ�䡢���ؽڵ��˶�����ȡ��ֲ��û�������ZMP�IJ�̬�滮�����������˼·Ϊ������Ԥ�ȹ滮ZMP�켣������Ĺ켣����Σ�ͨ�����˶�ѧ�õ��ؽ��˶��켣��ͨ�����˶�ѧ�����ؽڽǹ켣��
ͼ1 ZMP��
Fig. 1 Zero-moment point
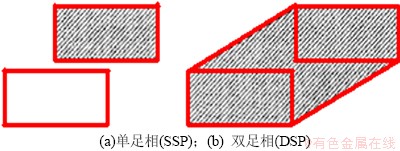
ͼ2 ֧�Ŷ����
Fig. 2 Supported polygon
1.2 ���ڸ���·������Ļ����˲�̬�滮
1.2.1 ZMP�Ĺ滮�����Ĺ켣����ֵ���
ZMP�켣Ҫ������֧��ͼ�ε��м䣬ZMP����֧��ͼ�εı߽�ԽԶ�����ڲ��еĻ�������˵�����е��ȶ�ԣ��Խ�ߡ�1���滮�õĹ������˲��в��յ�ZMP�켣ͨ����Ϊ��ZMP����ͼ3�е�ZMP_ref��
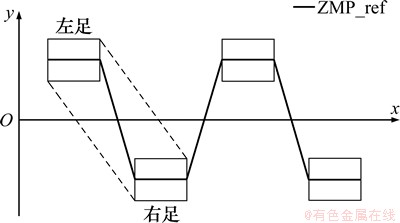
ͼ3 ��ZMP�滮ʾ��
Fig. 3 ZMP-based gait planning
ͼ3�б�ʾ������Ϊ������Σ�ZMP�켣����������м䣬�����㴥��ʱ�������˫���ࡣZMP�����������˶���������������֧��ͼ����ͼ�����ߺ�2������ɵ�����Σ����ֹ滮�DZȽϽӽ�����IJ��еġ����У�ͨ��ģ�ͼ��Լ�����ɵõ����Ĺ켣��Ԥ�ȹ滮��ZMP�켣�Ĺ�ϵʽ��
 (1)
(1)
ʽ�У�px��py�ֱ�ΪZMP���X��Y�������ꣻcx��cy��cz�ֱ�Ϊ���ĵ�X��Y��Z�������ꣻmΪ�����˵�Ч������
����ʽ(1)�������ȶ�ԣ�ȵIJ�����ƿɵ�����������ͼ4��ʾ�����Σ�ZMP�켣��Y���ƶ�������λ�ã������˳�ʼ����ֱ������ʱ�����˲��ܹ��������ã�ZMP���������غϣ���ͼ4��(0, 0)�㡣�������ڽ����ʼ����״̬ʱҲ��Ҫ����ZMP��֧��ͼ���ڣ��������˽��벽��״̬ʱ����СZMP��Y����룬���������˶�����������滮��ZMP�켣���ɵ����Ĺ켣��ͼ5��ʾ��
1.2.2 �㲿�켣�IJ�ֵ
��������ZMP�����㲿��ֵ�����ò�����ͼ6��ʾ��ͼ6�У�DsΪ��������1�ͦ�2�ֱ�Ϊ��̧�������ʱ��͵���нǣ�b1��b2�ֱ�Ϊ�����ؽ�Ϊ�ֽ��2�����㳤��L1��L2�ֱ�Ϊ���Ⱥ�С�ȵij��ȡ�
�Ƶ��Źؽ��˶��켣�������£�
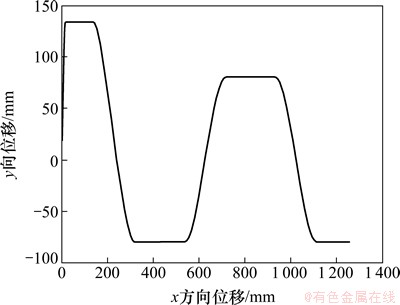
ͼ4 ��ZMP�켣
Fig. 4 Reference ZMP trajectory
ͼ5 ZMP��ɢ�������Ĺ켣��X-Y����
Fig. 5 ZMP trajectory discretization seeking centroid curve of X-Y
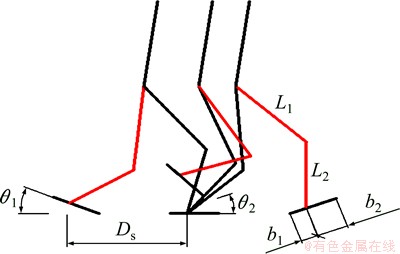
ͼ6 �㲿��ֵ����
Fig. 6 Foot interpolation parameters

 (2)
(2)
ʽ�У�T0Ϊ�������ڣ�KDSPΪ˫����ʱ������������Ӧ��������ŷֱ�Ϊ���Źؽ�(xh��zh)��ϥ�ؽ�(xk1��zk1)��(xk2��zk2)���ؽ�(xa1��za1)��(xa2��za2)���õ�ģ�ͼ���Լ�����̣�



 (3)
(3)
ͨ���������������������㲿�IJ�ֵ�������õ�ͼ7��ʾ�㲿�켣����Y�����ϣ��㲿�Ĺ켣���ZMP������С���ɡ�
�����㲿��ֵ�����Ļ��������Ƕ�1�����������м���״̬�IJ�ֵ��Ȼ�Ѽ���״̬�ۺ���һ����˫���������ʱ���λ���Ϻ�ZMP�켣��ϣ���ֵ������������1��ʱ����ڵ�2���㲿��λ�ˡ��ٶȡ����ٶȵ���Ϣ��
ͼ7 �������ֵ�����ͻ�ZMP��X-Y����
Fig. 7 Left foot interpolation function and reference ZMP curve of X-Y
2 ���ڲ���·��-�����˸������ģ�͵�˫�㲽̬����
Ϊ��������˶���ʵ��������Ӧ��������̬�ȶ��Լ�����Ч�ʣ��Բ��л������˶����й滮ʱ��Ӧ��������ʵ������������γɵ�ʱ������Զ���ѧ��ϼ�������Ĺ켣����̬�ȶ��Ե�Ӱ�졣��������������·��Ϊ����·��������˫�㲽�л�����������·�������϶���ѧģ�ͣ��о���������Ի����˹ؽڶ�̬��Ӧ����̬������Ӱ�졣
2.1 ����·���Ķ���ѧ��ģ
��ADAMS�У���3�ֽ���������ķ�����1) ���������ӷ���2) ����Ԫ����3) ����ADAMS/AutoFlexģ�飬ֱ����ADAMS/ View�н����������MNF�ļ���Ȼ���������������ԭ���ĸ����塣��ѡ������Ԫ����ANSYS��������·����
������·��Ϊ������������Ԫģ��ʱ����2�ַ�����
1) ��ģ�͡�����·��㿴���ܵ��ػ�֧�еĵ������壬�ػ��ɲ���Winklerģ�͡�����ռ�ģ�ͻ�Pasternakģ�ͣ����֧�ж��ȼ������ڵ�Ԫ�ڵ��ϵķ�����·���ɷ�Ϊ�����˫�㡣
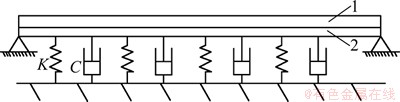
2) ��άģ�͡�����·��ṹ��ʵ�ʼ�����״���ṹ��Ρ��ӷ���ѷ�Ӱ��ͺ�������λ�ã��DZȽ������ģ�ͣ�����Ҫ�ϴ�ļ����ڴ棬�������������о��ص����ڻ����˵IJ��У���ˣ����ýϼİ�ģ����ģ��·�档·���·����˫�㱡��ģ�⣬�ϲ�����·��㣬�²�����·���㣬��ͼ8�еIJ���1��2���ػ�����Pasternakģ�ͣ�·��ṹ�����������ú�ȡ��ܶȡ�����ģ���Ͳ��ɱȱ�ʾ��
��������Ŀ��ȷ�������ˮƽ�������ػ���ˮƽ������������������Ԫģ��ʱ������������������ģ�ͣ���10�ڵ������嵥ԪSOLID92�������֡�
ͼ8 ���·�Ķ���ѧģ��
Fig. 8 Dynamic model of asphalt road
2.2 ����·��-�����˸������ģ��
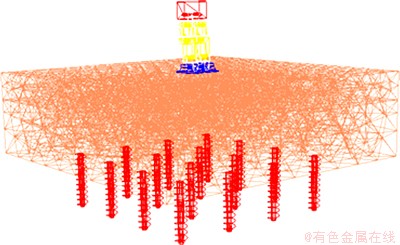
�������嵼��ADAMS�У���Ի�������������Ե���ĽӴ�����ͨ�������鹹��(dummy part)��������̽ӣ������鹹������������֮������ӹ�ϵ���������Ļ�����-����·�����ģ����ͼ9��ʾ��
2.3 ���ڲ���·��-�����˸������ģ�͵�˫�㲽�з���
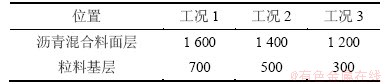
����JTGD 50��2006����·����·����ƹ淶��ѡȡ·�������Ϊ�˿��첽��·�������Բ����Ի����˲�̬��Ӱ�죬ͨ������3�鲻ͬ����(����1)��·�浯��ṹ���жԱȷ�����
ͼ9 ����·��-�����˸������ģ��
Fig. 9 Robot-walking path coupling model
����ǰ������������ȻZMP�켣�õ��IJ�̬�滮����������õ�����λ��-ʱ�����̡�ZMP�켣��ϥ�ؽ��������غ���Ӵ�������Ӧ���Բ������ֱ��ͼ10~13��
��1 ����·�浯��ģ��
Table 1 Elastic module of asphalt pavement MPa
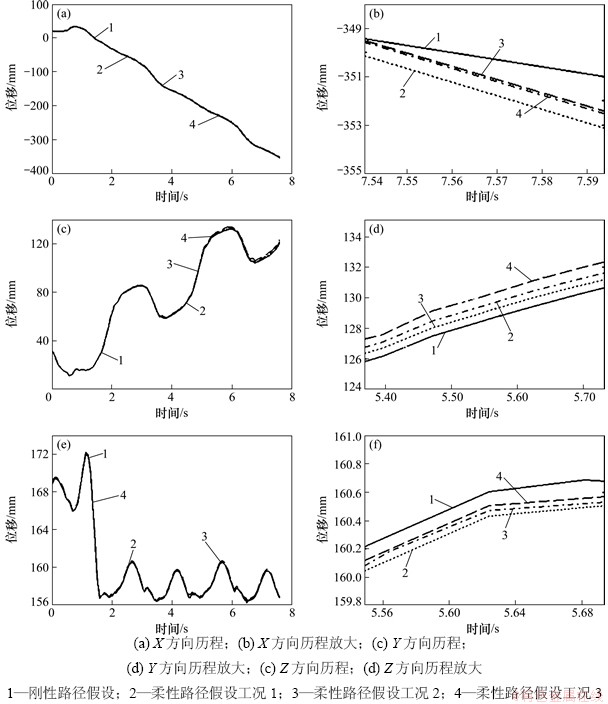
ͼ10 ����λ��-ʱ����������
Fig. 10 Centroid displacement-time curves
3 ����·���Ի����˲��в�����Ӱ�����
3.1 ����·���Ի��������Ĺ켣��Ӱ��
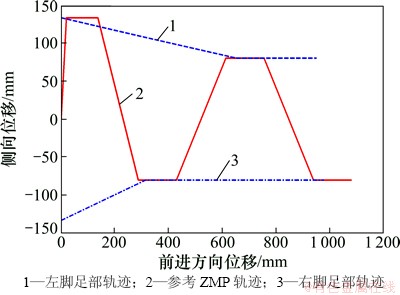
�Աȷ���3������·����������Լ����µ����Ĺ켣��ͼ10����2��ʾΪ3�ֹ�����3��ʱ�������ĸ߶Ⱥ�2��ʱ�����������ǰ����ƶ����롣ͨ��������֪����������ҵ·���У����������˵��˶�Ŀ�꺯�������ؽھ���ʵ���ȶ��˶���������ѽ�����˫�㲽�л�����������·�������϶���ѧģ������Ч�ġ�����������¡�
��������ҵ·���У������������ڸ߶ȷ����ܱ����ȶ��������������α䣬����ڸ���·�����ĸ߶��������ͣ��ȶ����н����ĸ߶Ȳ�����С��2.6%����������·���У�Ԥ�ڹ滮��ǰ�о���Ϊ360.0 mm����������ǰ���ƶ��ľ���ֱ�Ϊ373.3��372.6��372.7 mm�����ڸ���·����ǰ���ƶ��ľ���Ϊ351.1 mm��˵������Ȼ���滷���£������˵IJ���Ч�ʸ��ߡ�
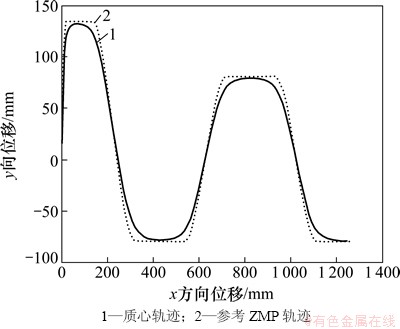
3.2 ����·���Ի�����ZMP�켣��Ӱ��
ͼ11��ʾΪZMP�켣����������ҵ·���У������˵�ʵ��ZMP�켣������ZMP����һ�£��ܹ�ʵ�ֲ����ȶ���3�ֹ�����ZMPǰ���ƶ��������2���ӱ�2�ɼ����ڿ���·������ʱ��ZMP�ƶ�����ϸ���·������ʱ��4.2%~6.8%��˵����Ȼ���滷���£������˵IJ�̬Ч�ʸ��ߡ�
3.3 ����·���Ի������������ص�Ӱ��
ͼ12��ʾΪ�����������ߡ���ͼ12�ɼ�����������ҵ·���У������˹ؽ���������ʱ�����ߵ����������·��ʱ����һ�£�����֫����֧��״̬ʱ����������Ե���ij����С���������س���ͻ���ֵ����8.3%~33.4%��˵������Ȼ���滷���£������˵IJ�̬��ƽ�ȡ�
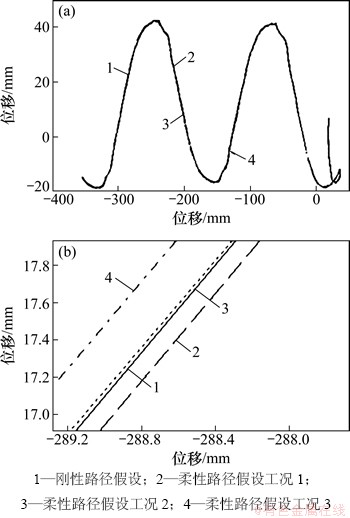
ͼ11 ZMP�켣
Fig. 11 ZMP trajectories
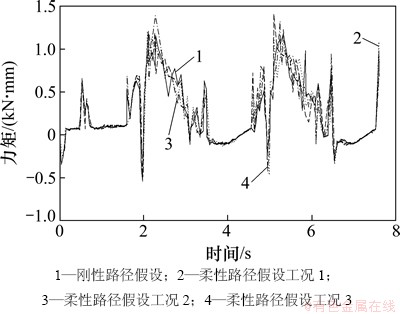
ͼ12 ϥ�ؽ���������-ʱ����������
Fig. 12 Driving moment-time curves of knee joint
��2 ������ZMP����ͳ��
Table 2 Gait parameter of COM and ZMP mm

3.4 ����·���Ի�������Ӵ�����Ӱ��
ͼ13��ʾΪ��Ӵ������ߡ���ͼ13�ɼ�����������ҵ·���У���Ӵ����ϸ���·���в���������ΧΪ7.2%~16.7%��ͬʱ�������Ե�������ڸ��Ե��濼��������ϵ������������ǿ���������ڲ��й��̳����ֵ������Լ8.0%��
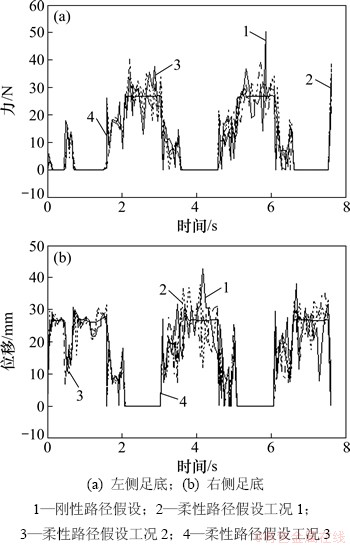
ͼ13 ��Ӵ���-ʱ����������
Fig. 13 Contact force-time curves of foot plate
4 ����
1) ����Pasternak�ػ�ģ�ͣ�ͨ��ANSYS���������˼��ֲ�ͬ�������Ե����Ե���ģ̬�����ļ�������ADAMS�еõ������������Ե�������϶���ѧģ�ͣ����ػ�����Ȼ�����ص�(ZMP)�켣�IJ�̬�滮�����õ��IJ�̬���ݣ����������Բ������������·�湤���¶Ի����˽����˶���ѧ���档������·����ҵ�£������˾��и��ߵIJ���Ч�ʣ����������ĺ�ZMP������ǰ������Զ3.3%~3.7%��������·����ҵ�»��������ĺ�ZMP������ǰ�������2.4%��
2) ������·����ҵ�»����˾��и����ȶ��IJ�̬��������ҵ·���»����˻���������������Ӵ����ȸ���·����ҵ��֧������Ӧ�ؽڵ���������ͻ���ֵ����8.3%~33.4%����Ӵ����ϸ���·��������Χ����7.2%~16.7%������Ի����˵ij������Լ8.0%�����IJ���С��2.6%��
3) Ϊ����߲���Ч�ʣ������ʵ·���µIJ�̬�ȶ��Խ��н�һ���о���
�ο����ף�
[1] ��־��. �����ͻ������˶������о�[D]. �Ϻ�: �Ϻ���ͨ��ѧ, 2000.
BAO Zhijun. Research on the movement characters of humanoid robot[D]. Shanghai: Shanghai Jiao Tong University, 2000.
[2] Vukobratovic M, Brovac B. Zero-moment point-thirty five years of its life[J]. Journal of Humanoid Robotics, 2004, 1(1): 157-173.
[3] Dasgupta A, Nakamura Y. Making feasible walking motion of humanoid robots from human motion capture data[C]//IEEE International Conference on Robotics and Automation. Detroit, USA, 1999: 1044-1049.
[4] ��־��, �ڹ���, ����. ���ڽ���ϳɵļ�ZMP���̵ķ��˻�������ά��̬�滮[J]. �������ѧ, 2010, 37(12): 215-217.
WANG Zhiliang, YU Guochen, XIE Lun. Three-dimensional gait planning for humanoid robots based on decoupling synthesis and ZMP algorithm[J]. Computer Science, 2010, 37(12): 215-217.
[5] Kajita S, Nagasaki T, Kaneko K, et al. A running controller of humanoid biped HRP-2LR[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain, 2005: 616-622.
[6] Fujimoto Y, Smadi I A, Wakayama Y. Development of musculoskeletal biped robot driven by direct-drive actuators[C]//Mechatronics (ICM), 2011 IEEE International Conference. 2011: 821-826.
[7] ������, ���, ������, ��. ɳ�ػ����ƶ������������ֵķ�չ�ſ�����[J]. �����˼�����Ӧ��, 2004, 4: 22-29.
FU Yili, XU He, WANG Shuguo, et al. Summary of the development of driving wheel of sandy environment for mobile robot[J]. Robot Technique and Application, 2004, 4: 22-29.
[8] Lacagnina, Michele, Muscato, Giovanni, Sinatra, Rosario. Modeling and simulation of multi-body mobile robot for volcanic environment explorations[C]//IEEE International Conference on Intelligent Robots and Systems. EPFL, Switzerland, 2002: 714-720.
[9] XIAO Xiaohui, WU Gongping, DU E, et al. Impacts of flexible obstructive working environment on dynamic performances of inspection robot for power transmission line[J]. Journal of Center South University of Technology, 2008, 15(6): 869-876.
[10] Ҧ����. ˫�����ƶ������˵��沽�е��о�[D]. ������: ��������ҵ��ѧ���繤��ѧԺ, 2009.
YAO Shibin. Research on dual-arm & hands mobile robot walking on the ground[D]. Harbin: Harbin Institute of Technology. School of Mechanical Engineering, 2009.
[11] �|����˾. ���˻�����[M]. ������, ��. ����: �廪��ѧ������, 2007: 10-150.
Shuuji Kajita. Humanoid robot[M]. GUAN Yisheng, trans. Beijing: Tsinghua University Press, 2007: 10-150.
(�༭ �²ӻ�)
�ո����ڣ�2013-10-31�������ڣ�2013-12-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51175383)(Project (51175383) supported by National Natural Science Foundation of China)
ͨ�����ߣ�Ф����(1969-)��Ů�����ϰ����ˣ���ʿ�����ڣ���ʿ����ʦ�������ƶ�������ѧ�������������о����绰��13720360269��E-mail��xhxiao@whu.edu.cn

