稀有金属 2003,(05),621-627 DOI:10.13373/j.cnki.cjrm.2003.05.029
电流变流体和磁流变流体在工程上的应用
梁钟 李乔治
中国民用航空学院机电学院,纽约州立大学布法罗分校,纽约州立大学布法罗分校 天津300300 ,布法罗14260,美国 ,布法罗14260,美国
摘 要:
阐述了ER和MR流体的组成及发展过程 , 并对它们的物理和化学性能进行了对比分析 , 总结了现有ER和MR流体的理论计算模型、应用领域和应用状况 , 提出了ER和MR流体阻尼装置的分类方法及使用时应注意的几个问题 , 最后对ER和MR流体现存的问题和发展方向作了分析和展望。
关键词:
ER流体 ;MR流体 ;智能材料 ;阻尼装置 ;工程应用 ;
中图分类号: TB381
收稿日期: 2003-01-31
基金: 民航总局中青年研究基金 ( 990 3 5 0 11);
Engineering Application of ER and MR Fluids
Abstract:
The composition and development of ER and MR fluids were described. Their physical and chemical characteristics were compared. The mathematical models, applied range and status were summed up. The classified method of dampers and several problems in use were put forward. Finally the limitations and the developing directions of ER and MR fluids were analysed.
Keyword:
ER fluid; MR fluid; smart materials; damper; engineering application;
Received: 2003-01-31
ER流体 (电流变流体) 和MR流体 (磁流变流体) 同属于一类可控制流体, 又称为“智能材料”。 它们是在某种载体如矿物油或硅油等中加入可以被电场或磁场极化的精细微粒而成的悬浮液。 当施加电场或磁场到这些流体上时, 该流体的流变学特性就会在瞬间发生变化, 表现最明显的是流体的粘度, 可以从数值较小的液态瞬间变为粘度较大的胶体状态。 当将电场或磁场撤消后, 又可恢复到原来的状态。 在ER流体击穿电压或MR流体磁饱和允许的范围内, 施加的电场或磁场的强度越强, 粘度增加得越多。 由于上述性质, 使得它们在工程上得到了广泛的研究与应用。
ER流体和MR流体最早起源于20世纪40年代, 是由Winslow W M
[1 ]
和Rabinow J
[2 ,3 ]
发现的。 当时的“Winslow 流体”是用某种细粉末如淀粉、 石灰、 石膏、 碳或硅等与油混合而成的悬浮液体。 由于这种流体易挥发、 不耐高温且受贮存稳定性的限制, 商业应用价值不大。 所以早期的研究一直进行得很缓慢, 直到今天也没有任何产品和装置保留下来。 随着科学的发展和技术的进步, 人们对ER和MR流体的认识和控制技术有了显著提高, 其应用研究的范围也不断扩大。 现在的ER和MR流体与早期的ER和MR流体相比, 已发生了质的变化。 如果说早期的研究具有“偶然性”的话, 现在的研究具有很强的目的性和前瞻性。 无论从所加的导电或导磁微粒, 还是从所用的载体及应用领域方面, 都充分说明了这一点
[4 ,5 ,6 ,7 ]
。 现在的 MR和ER流体所用的载体除矿物油、 硅油、 松木油、 水、 液态氮和合成油外, 人们还将研究和开发可用于医学的载体。 在导电和导磁微粒方面, 人们正在探讨使用不同的导电和导磁微粒来提高ER和MR流体的物理性能、 化学性能、 机械性能等以满足不同领域、 不同工作装置的要求。 现在的ER和MR流体的工作温度、 剪切强度、 稳定性和响应时间等都比以前有了长足进步, 并且正朝着性能研究和装置设计协调进行的方向发展。
1 ER和MR流体的力学模型与性能
ER和 MR流体均属于非牛顿流体, 目前用于计算的力学模型还不够完善, 主要有以下几种形式: (1) Bingham模型
[8 ]
; (2) Bouc-Wen模型
[9 ]
; (3) Herschel-Bulkley模型
[10 ,11 ]
。 有关ER流体和MR流体的其他性质见表1。
从表1可以看出, 虽然 ER和MR流体有着类似的塑性粘度和可控性, 但在某些具体性能参数上, 还是有着明显的区别。 一是MR流体的剪切强度比ER流体大; 二是MR流体的工作温度范围比ER流体高; 三是MR流体包容杂质的能力比ER流体强。 但ER流体更容易商业利用和在实验室制造, 基于ER流体的装置比基于MR流体的装置易于设计与制造。 虽然ER和MR流体的响应时间一般取决于装置设计, 但在同样的条件下, ER流体响应时间比MR流体快, 这一点见文献
[
12 ,
13 ]
。
表1 ER和MR流体典型的物理和化学性质 下载原图
Table 1 Typical physical and chemical character of ER fluids and MR fluids
表1 ER和MR流体典型的物理和化学性质
所以在进行工程装置设计时, 应根据ER和MR流体的性质和装置的不同要求, 选取相应的ER或MR流体和计算模型。
2 ER和MR流体在工程上的应用分类
目前, ER和MR流体在工程上研究和应用领域涉及有机械工业
[14 ]
、 地震工程
[15 ,16 ,17 ,18 ]
、 船舶、 汽车
[19 ,20 ]
、 航空航天
[21 ,22 ,23 ]
、 机器人、 医学、 海洋工程
[24 ,25 ]
等。 利用ER和MR流体制成的各种工程应用装置, 有的已在工程和实验中发挥了重要作用, 这些应用包括阻尼器、 旋转刹车、 离合器、 液压阀、 汽车减震器、 抛光装置、 人造假肢等。 这些应用虽然不尽相同, 功能各异, 但按其工作原理不同, 归纳起来可分为如下4种类型, 下面分别阐述。
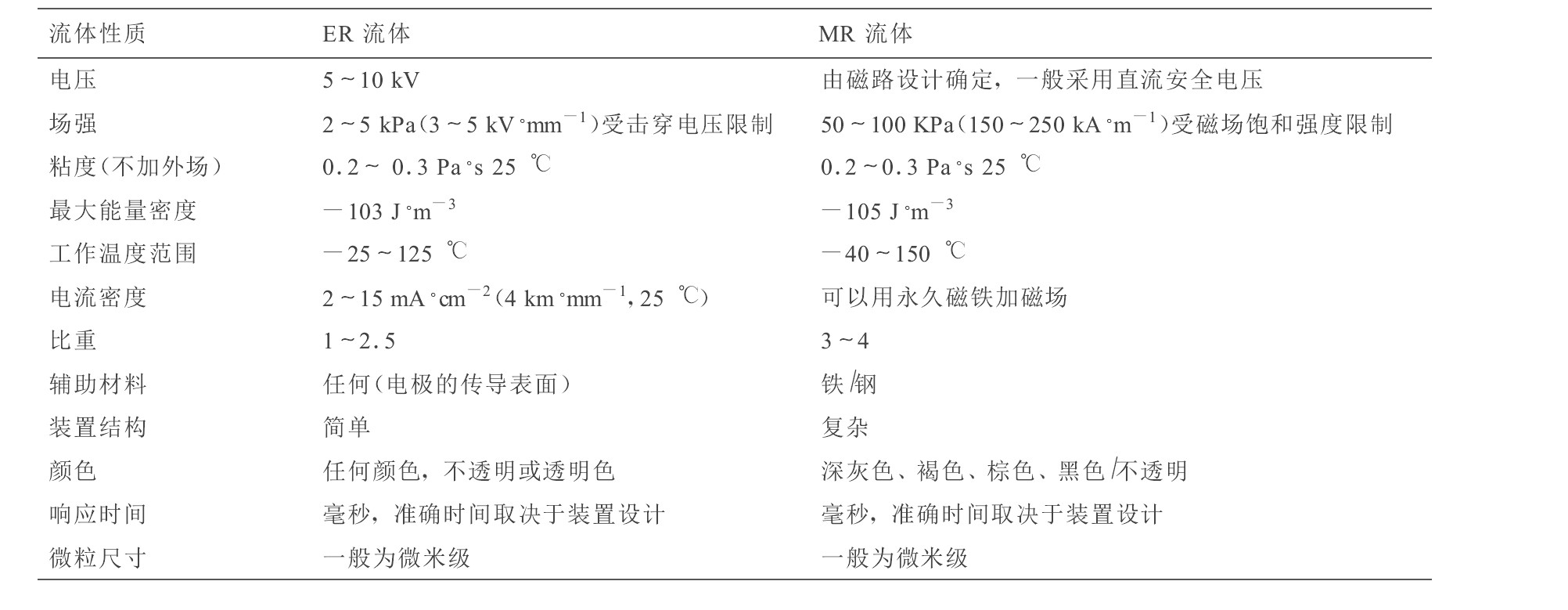
第一类为节流型, 是工程上应用最多的形式之一。 其工作原理是在阻尼缸两端压强差的作用下, 迫使ER或MR流体流过间隙或阀, 产生流动阻力, 阻力的大小除与间隙或阀的节流装置的形状和尺寸有关外, 还与ER和 MR粘度有关。 在同样尺寸的间隙和边界条件下, ER和MR 流体的粘度越大, 则产生的阻尼力越大。 而流过间隙上的流体粘度是受电场或磁场控制的, 施加不同方向和不同强度的电场或磁场, 就会产生不同大小的阻尼力。 这种阻尼力的变化范围是由ER或MR流体的粘度变化范围决定的。 粘度变化范围越大, 阻尼力的变化范围也越大, 阻尼器适用的工作频率范围也越宽。 按着这样的原理设计出的阻尼器 (或称减振器) 如图1~4所示。
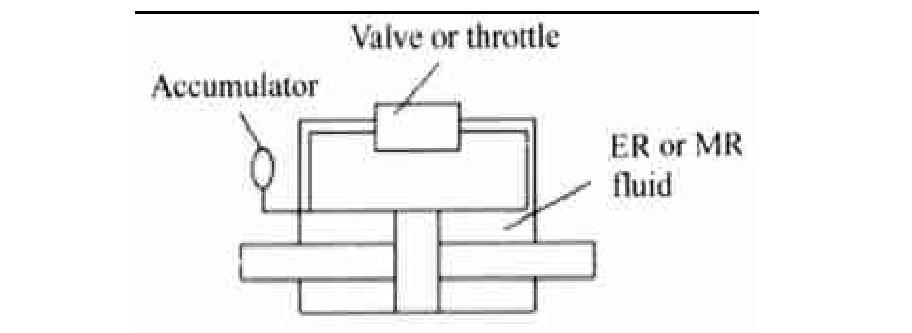
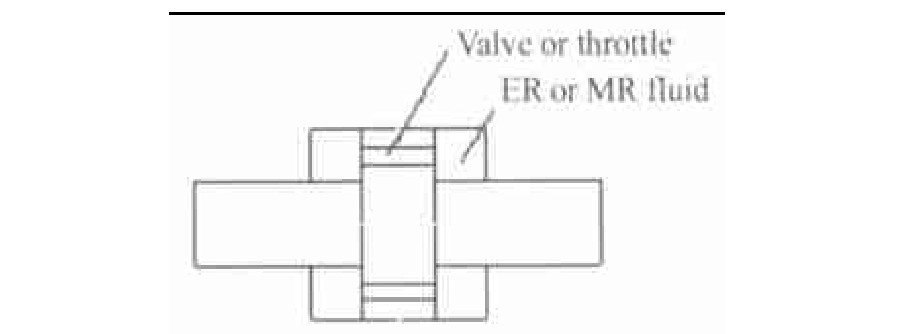
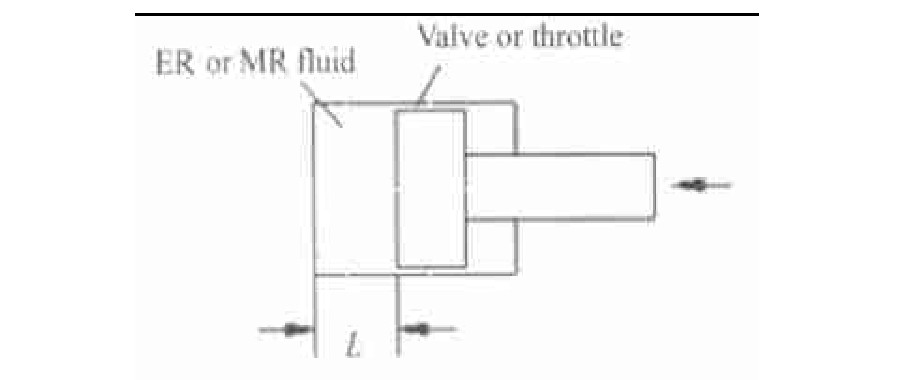
图1是将MR或 ER阀或节流通道用单独的管道连接起来放在阻尼缸的外面, 这种布置形式结构松散、 体积稍大, 但散热好, 出现故障时易于查找和排除。 对于工作温度较高的阻尼器, 可以加装蓄能器来作热膨胀用, 如 Lord 公司的MRD-9000 阻尼器就加装了供热膨胀用的蓄能器。 图2是将阀或节流装置设在了活塞的里面, 这种布置形式结构紧凑、 响应较第一种快, 但散热不好, 出现故障时不易于查找和排除。 图1和2都属于双作用双杆活塞缸, 这种形式一般适用于往返阻尼力大小一样、 行程较长的工况。 如果将图1和2的阻尼器设计为单杆双作用式活塞缸, 如图4所示, 这时由于阻尼器左右两腔活塞有效面积不一样, 使得往返的阻尼力大小也不一样。 为了在往返行程时容积能够得到补偿, 避免出现空穴和过压, 在无杆腔缸筒内端部要加一个弹性装置或蓄能器
[26 ]
, 如图4中的蓄能器就是这个作用, Lord 公司RD-1005-3也是采用的这种形式。 这种形式一般适用于作冲击式减震器。 在文献
[
27 ]
中, 用ER流体减振器代替原来的汽车针阀减振器, 使得调整起来更方便、性能更好。 当然这种划分并不是十分严格的, 只要结构设计得当, 参数选择正确, 两者有时是可以通用的。 另外, 有关ER阀在工程上的应用可参考文献
[
28 ]
。 用ER阀或MR阀代替伺服阀, 即可减少运动部件的数量, 提高系统工作的可靠性, 又可提高系统的工作频率和范围。
图1 双杆外置节流装置
Fig.1 Dual-rod outside throttle set
图2 双杆内置节流装置
Fig.2 Dual-rod inside throttle set
图3 单杆内置环形节流装置
Fig.3 Single-rod inside annular throttle set
图4 单杆内置节流装置
Fig.4 Single-rod inside throttle set
图1和2有时称其为流动型, 关于这两种阻尼器的详细情况可参看文献
[
9 ,
29 ,
30 ,
31 ,
32 ,
33 ]
。 图3所示阻尼器称为挤压型, 原因是它在外力作用下, 活塞左端部的、 长为L 的流体段的流体被挤压, 然后从活塞与缸筒的环形间隙流到右腔, 阻尼力的大小取决于流体粘度、 活塞的轴向压力、 节流通道结构和尺寸。 本文之所以将其归纳为节流型, 这是因为环形间隙就如同一个节流口, 节流口上的压力差是由活塞杆上的轴向力决定的。 虽然活塞左端部的流体被挤压时存在着径向方向的剪切力 (剪切型下面将介绍) , 但这种阻尼力的大小是受节流口控制的, 所以本文也将其归到节流型或者称为混合型。 对这种型式, 在实际装置设计时, 为了增加节流阻力, 可以在活塞外径和缸筒内径上制成螺纹状沟槽。 这在文献
[
34 ]
中有较详细阐述。 对于节流型流量和压力计算可参考文献
[
10 ]
。
第二类为剪切型, 剪切型不象节流型那样是靠压差迫使流体运动, 产生阻力, 而是靠流体与固体壁面之间的粘滞力和流体层之间相对运动时产生的内摩擦阻力, 其工作原理如图5所示的旋转式离合器, 就是一个典型的例子。 在图5中, 当输入转子以角速度ω 旋转时, 通过间隙h 内的ER或MR流体将输入轴转速和转矩传递给输出轴转子, 从而使输出转子随输入转子一起转动。 在间隙形状、 结构尺寸一定的条件下, 输入转子传递给输出转子的转矩主要取决于ER或MR流体外加的电场或磁场产生的摩擦转矩的大小。
当不施加电场或磁场到间隙上的流体时, 这时产生的粘性摩擦转矩很小, 不足以驱动输出转子转动。 当施加电场或磁场到间隙上的ER或MR流体上时。 这时流体的塑性应力增加, 产生的摩擦转矩增大, 足以驱动输出转子带动负载一起转动。 这种离合器的优点是可以得到连续的、 可变的输出转矩, 动力消耗少, 操纵方便, 效率高。 另外也可以用多片形式来增加输出转矩的数值。 根据这一原理制成的工程装置除离合器
[2 ,35 ,36 ]
外, 还有旋转刹车
[37 ]
如Lord公司的MRB-2107-3、 制动器
[38 ]
、 变速器
[39 ]
、 固体表面抛光装置
[40 ]
等。 有关ER和MR流体离合器的性能对比分析和计算可参考文献
[
13 ]
。
图5 单盘型ER或MR流体离合器
Fig.5 Single annular ER or MR fluid clutch
第三类为震荡型。 它与前两种不同的是液体在液箱中运动时有自由表面, 液体随液箱振荡时产生阻力, 改变振动体的阻尼和频率。 它与工程上的TLD型的区别是液体由一般液体改为ER或 MR流体。 因为TLD或TMD型是地震工程中应用较多的简单、 有效、 灵敏的被动阻尼装置, 又因为它相对其它阻尼装置而言, 具有投资和维护成本低的优点, 所以它在工程上得到了广泛应用, 如南京电视塔、 日本长崎机场塔楼、 空间卫星等。 它是利用粘性液体在刚性箱中的振荡特性来吸收和消散由于风、 地震、 交通载荷等扰动产生的结构振动能量, 来保证高楼、 电视塔、 飞行装置的安全。 为了提高这种阻尼装置的减振性能, 人们对TLD 阻尼装置采用了各种改进措施, 采用不同形状如矩形、 柱型、 椭圆型和环型的液箱、 底面带有斜坡的液箱
[41 ]
, 或提高液箱底面的粗糙度
[42 ]
, 在液箱的侧壁面上安装方型垂直障碍等
[43 ]
, 来增加扰动, 使液体产生紊流, 提高阻尼比和能量耗散作用。 也可采用高粘度的液体如浓泥浆
[44 ]
等, 来达到同样的效果。 上述这些措施在给定的设计条件下, 虽然都能收到很好的效果, 但一旦振动条件和振动频率发生改变, 就会使减振效果变差。 因为一般流体的振荡频率是不能改变的, 它是由液箱尺寸和液体的粘度等决定的。 如果将ER 和 MR流体应用于TLD 中, 上述问题就应刃而解了。 因为可以利用ER流体和MR流体的粘度可控性改变ER-TLD 或 MR-TLD 的频率范围和阻尼力大小。 另外, 由于ER 或MR流体的粘度比普通流体的粘度大十几倍 (见表1) ; 所以同样的条件也比普通流体的阻尼力大, 并且可以变被动控制为半主动控制
[45 ,46 ]
。
第四种类型为“开关型”。 所谓开关型, 顾名思义, 是它在管路中起着阻断或接通管路流动的作用。 置于管道中的液体, 在压差作用下, 能否产生流动取决于液体粘性阻力与压差阻力的关系。 如果粘性阻力大于压差阻力, 则液体就不会产生流动。 反之, 必将产生流动。 根据这样的原理, 文献
[
47 ]
用MR流体作了人体血管网路模拟实验, 基本原理是为了切断人体血管向肿瘤供应血液, 在肿瘤附近的血管注入MR流体, 然后给这部分MR流体施加磁场, 当施加磁场后产生的粘性阻力大于血管压差阻力时, 这时的 MR流体就相当于一个“开关”或“堵塞”, 封住了血液流动。 使供向肿瘤的血液中断, 从而使肿瘤得到控制。 虽然这只是一种模拟实验, 距实际应用还有一段距离, 但它确为 ER或MR流体在医学领域的应用开辟了一条新的途径。 相信随ER或MR流体的性能的不断改进, 品种不断增多, 将有更多的ER或MR 流体装置在医学领域获得应用。
3 ER和MR流体阻尼器在地震工程中的应用
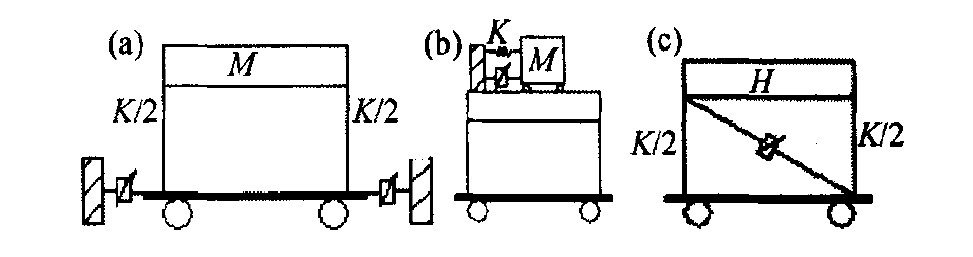
地震是人类最大的自然灾害之一。 如何预防和减轻地震对人类的危害, 多年来人们研究和探索了各种主动和被动的控制策略。 这些措施虽然不尽相同, 归纳起来为下面3种类型: 一是基础隔离; 二是调谐质量阻尼器 (简称TMD) 或调谐液体阻尼器 (简称TLD) ; 三是构架系统, 如图6所示。
上述控制策略虽然已在地震工程中得到成功地应用, 但它们也面临着成本, 外部动力的可靠性、 刚度、 机构复杂、 频率响应范围的挑战。 如果将图6中的阻尼器用ER或MR流体取代, 上述问题有的就可以应刃而解了。 它们不仅可以实现被动控制变为半主动控制, 而且还具有动力要求低、 能量输出大、 高的动力范围、 高的刚度和机构简单等优点。 ER和MR流体阻尼器另一个优点是一旦电源失效 (这在地震中时有可能发生的事) , 仍能保持较好的阻尼性能 (零外场时的阻尼性能) 。
Takehito
[45 ]
和Abe
[46 ,48 ]
等分别对ER流体和MR流体的调谐振荡阻尼器 (简称TSD) 进行了理论分析和实验研究, 文献
[
48 ]
利用Navier-Stokes方程推出了低雷诺数下的计算模型。 实验结果表明, 由于ER-TSD和MR-TSD 的振荡频率是可控的, 所以ER-TSD和MR-TSD 获得了更宽的结构振动频率的响应范围, 并且可以利用粘度的可变性优化结构振动系统的性能, 从而达到最佳控制。
图6 预防地震的3种措施
Fig.6 3-main seismic control strategies
(a) 基础隔离系统; (b) TMD, LTD 阻尼系统; (c) 构架系统
ER 和 MR流体阻尼器在地震工程中的应用以构架型式为最多, 如Fu等
[49 ]
使用四平行圆盘、 剪切型MR 流体阻尼器在六层实验结构上进行了振动控制实验。 其中, 两个阻尼控制装置安装在基础和一层之间, 另外两个安装在一层和二层之间。 实验结果说明, 在各种激励条件下, 只要施加少量的电力 (磁场) , MR流体阻尼器的减震性能都超过被动阻尼器的性能, 并实现了半主动控制。 文献
[
50 ]
采用集中参数法对3层模型建筑进行了实验研究, 找出了ER流体和MR流体阻尼器在结构中放置的最佳位置。
4 ER和MR流体存在的问题及设想
从以上分析可以看出, 由于ER和MR流体的独特性能, 使它具有广阔的应用前景。 但由于目前的ER 和MR 流体在性能上还有许多不完善的地方, 所以使得许多研究还处于性能研究和模型研制阶段, 如何提高ER和MR流体的性能, 使它们更多更早地在工程上发挥作用, 必须解决如下几个问题:
1. 从组成成分来看, 现在的ER和MR 流体都是在某种基液如矿物油、 硅油等中加入不同的、 可以极化的精细微粒混合而成的悬浮液。 目前这种悬浮液的主要问题是长期稳定性较差, 经过一定时间后, 混合后的微粒就会出现沉淀。 虽然经过振荡后又可重新混合, 但势必给使用领域和装置性能带来很多不便。 因此, 解决ER和MR流体的沉淀问题是当前面临的难题之一, 应该在磁载子选择、 磁性颗粒的制备和合成方法上进行深入的研究。 其次, 现有的MR流体如Lord公司的MRF-132Ld的变阻幅值还不够宽, 出售的阻尼器与其说明书上的性能还有一定差距。
2. 从应用领域考虑, 多性能、 多用途的ER 和 MR 流体应是今后的一个研究课题。 因为应用的领域不同、 功用不同, 就要求ER和MR流体有不同的性能。 除要求他们应具有较大的粘度范围、 较好的稳定性、 润滑性和较大的工作温度范围外, 对不同的领域还有不同的要求。 象文献
[
47 ]
那样, 如果ER和MR流体是为了阻断血管向肿瘤供应血液, 则这种ER和 MR流体除应满足增加阻力堵塞血管外, 还必须能与血液相容, 它们应该象针剂一样对人体不产生任何损害; 如果将其用在地震工程中, 希望它在零场时有较大的塑性粘度, 这样有利于万一阻尼装置的动力损失 (这在地震期间是经常发生的) , 它们仍具有较强的阻尼作用; 反之, 如果将其用在离合器和旋转刹车上, 又希望它们在零场时的塑性粘度小一些更好, 这样有利于减少空载时的能量损耗; 如果将其用于高频减震, 它们又需具有良好的流动性和较快的响应速度; 如果将其用在航空或航天飞行装置中, 又要求它们具有很好的高空性能等。
3. 从使用角度考虑, 总是希望既要有良好的性能, 又要有合适的价格。 这似乎是一对矛盾, 但这对矛盾必须得到很好解决, 否则将影响它在工程上的应用范围和数量。 现在的 ER和MR流体的价格和性能比还是很高, 如美国Lord公司出售的磁流变液为595美元/L, 所以使得它的应用受到了诸多限制。 所以从长远考虑, 在不断提高 ER 和 MR 流体性能的同时, 还必须将价格降下来, 这样才能占领广阔的市场。 另外, 完善 ER 和 MR流体的理论计算, 对每一种流体给出准确地理论计算关系式、 提供各种工程计算的实验依据, 也是今后必须解决的一个问题。
上述要求虽然不能同时满足, 但对某一具体的应用领域和装置, 应该具有某一方面的性质是非常必要的。
参考文献
[1] WinslowWM . Inducedfibrationofsuspensions[J].JournalofAppliedPhysics, 1949, 20 (12) :1137.
[2] RabinowJ . Themagneticfluidclutch[J].AIEETransactions, 1948, 67:1308.
[3] RabinowJ .Magneticfluidtorqueandforcetransmittingdevice[P].U .SPatent, 2575360, 1951.
[4] 邱关明, 张 明, 严长浩, 等. 稀土掺杂聚苯撑ER流体的研究[J].中国稀土学报, 2001, 19 (1) :12.
[5] 张正勇, 张耀华. 磁流变液的特性研究[J].功能材料与器件学报, 2001, 17 (4) :340.
[6] 王建明, 孟 光. 磁流变液研究进展[J].航空学报, 2002, 23 (1) :6.
[7] 王琪民, 徐国良, 金建峰. 磁流变液的流变性能及其工程应用[J].中国机械工程, 2002, 13 (3) :267.
[8] PangL , KamathGM , WereloyNM . Phenomenologicalmodelofamagnetorheologicaldamper.Im:DavisLP , Proc.ofSPIE -Int.Soc.Opt.Eng.SPIE , 1998, 3327:284.
[9] SpencerJrBF , DykeSJ , SainMK , etal. PhenomenologicalmodelofamagnetorheologicaldamperASCE [J].JournalofEn gineeringMechanics, 1997, 123 (3) :230.
[10] WangXiaojie, FaramarzGordanjnejad. Herschel bulkleyanaly sisofelectro andmagneto rheologicalcontrollablefluidsinflowmode[A ].Proceedingsofthe7thInternationalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii., 1999, 568.
[11] DugYoungLee, NormanMWereley. Quasi steadyHerschelBulkleyanalysisofelectro andmegneto rheologicalflowmodedampers[A].Proceedingsofthe7thInternationalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii, 1999, 579.
[12] PeelDJ , BulloughWA , StanwayR . ModellingandtestdatacomparedforanERlong strokevibrationdamper[A].Proceed ingsofthe7thInternationalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C ].Honolulu, Hawaii.1999.
[13] ChoiSB , HongSR , CheongCC . Comparsionoffield con trolledcharacteristicsbetweenERandMRclutches[A].Pro ceedingsofthe7thInternationalConferenceonElectroRheologi calFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii.1999, 603.
[14] WinslowWM . Methodandmeansfortranslatingelectricalim pulsesintomechanicalforce[P].USPatent, 2417850, 1947.
[15] SkinnerRI , Robinson, etal. AnIntroductiontoSeismicIsola tion[M ].NewYork:Johnwiley&SonsLtd, 1993.
[16] ItkuS . TheoryofAdaptiveStructures[M].CPCpress, 1998.
[17] DykeSJ , SpencerJrBF . Acomparisonofsemi activecontrolstrategiesfortheMRdamper[A].ProceedingsoftheIASTEDInternationalConference[C ].Intelligentinformationsystems, TheBahamas, 8-10.1997.
[18] YiFu, ShirleyJD , JuanMC . Seismicresponsecontrolusingsmartdampers[A ].Proceedingsofthe1999AmericanControlConference[C].SanDiego, California, 1999, 2.
[19] 廖昌荣, 余 淼, 陈卫民, 等. 汽车磁流变减振器设计原理与实验测试[J].中国机械工程, 2002, 13 (16) :391.
[20] 陈吉安. 应用于汽车减振的磁流变液阻尼器的设计原理[J].机械・计算・研究, 2002, 8:9.
[21] AlfriendK . Partiallyfilledviscousringnutationdamper[J].J .Spacecraft, 1974, 456.
[22] BhutaPG , KovalLR . Viscousringdamperforfreelyprecess ingsatellite[J].Int.J .Mech.Sci., 1996, 383.
[23] GopalakrishnaMKamath, NormanMWereloy, MarkRjoly. Characterizationofmagnetorhrologicalhelicopterlagdampers[J].JournaloftheAmericanHelicopterSociety, 1999, 7:234.
[24] 管友海, 黄维平. MR阻尼器在海洋平台半主动控制中的应用[J].中国海洋平台, 2002, 17 (3) :25.
[25] 管友海, 李维军, 黄维平. 海洋平台磁流变阻尼器半主动控制的研究[J].青岛海洋大学学报, 2002, 32 (4) :650.
[26] ZhuShixing, LiuRonglin, WangHui. Anexperimentalstudyofanewmagneto rheologicalfluiddamper[A].Proceedingsofthe4thInternationalSymposiumofFluidPowerTransmissionandControl[C].Wuhan:InternationalAcademicPublishers, 2003, 4:599.
[27] JasonLindler, NormanMWereley. Designandtestingofanelectrorheologicalfluidautomotiveshockabsorber[A].Proceed ingsofthe7thInternationalconferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C ].Honolulu, Hawaii.1999,
[28] ChoiSB , SungKG , KimS , etal. ActivecontrolofERvalveswithapplicationtoseaportcargohandingsystem[A ].Proceed ingsofthe7thInternationalconferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C ].Honolulu, Hawaii, 1999, 767.
[29] DykeSJ , SpencerJrBF , SainMK , etal. Modelingandcon trolofmagnetorheologicaldampersforseismicresponsereduction[J].SmartMat.andStruct., 1996, 5:565.
[30] WilliamA .Bullough, DavidJPeel, etal. AnERlong strokedamperforvehiclesuspensionapplications, developmentsinElectrorheologicalflowsandmeasurementuncertainty[J].ASME , 1994, 41.
[31] ZhengLou, RobertDErvin, FrankEFilisko. Apreliminaryparametricstudyofelectrorheologicaldampers[J].ASME , Elec tro rheologicalflows, 1993, 164.
[32] BillieFSpencerJr, GuangqiangYang, JDavidCarlson, etal. Smartdampersforseismicprotectionofstructures:Afull scalestudy[A ].ProceedingsoftheSecondWorldConferenceonStructuralControl[C].Kyoto, 1998.
[33] KimKS , KimSH . AstudyonERsuspensionsystemwithen ergygeneration[A].Proceedingsofthe7thInternationalConfer enceonElectroRheologicalFluidsandMagnetoRheologicalSus pensions[C].Honolulu, Hawaii, 1999, 796.
[34] RogerStanway, NeilDSims, AndrewRJohnson. MagnetoRheologicalfluidsinsqueeze flow:validationofquasi steadymathematicalmodels.Rheologyandfluidmechanicsofnonlinearmaterials[J].ASME , 1999, 117.
[35] LeeW , KimD , HurN , etal. Designanalysisandexperimen talevaluationofanMRfluidsclutch[A].Proceedingsofthe7thInternationalconferenceonElectroRheologicalFluidsandMag netoRheologicalSuspensions[C].Honolulu, Hawaii, 1999, 674.
[36] BulloughWA , SmythR . Comparativemaximumperformancindicatorsforelectro sensitiveclutches[A].Proceedingsofthe7thInternationalconferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii, 1999.
[37] http: www.rheonetic.com devicesbrakebeginhtm
[38] 徐 静, 黄 雁. 磁流变制动器的设计与探讨[J].机械设计与制造, 2001, (3) :34.
[39] 黄 金, 李慰立, 魏玉卿, 等. 磁流变液无机变速器原理[J].西南师范大学学报 (自然科学版) , 2001, 26 (3) :284.
[40] NoritsuguUmehara, IsaoShibata, KazuyaEdamura. Newpolish ingmethodwithmagnetocongelationliquid[A].Proceedingsofthe7thInternationalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii, 1999, 693.
[41] Sigurdur, Gardarsson, HarryYeh, etal. Aninvestigationofsl oped bottomtunedliquiddampers[A].ProceedingsoftheSec ondWorldConferenceonStructuralControl[C ].1998, 13:155.
[42] FuijioY , etal. Parametricstudiesontunedliquiddamper (TLD ) usingcircularcontainersbyfree oscillationexperiments[J].StructuralEng.EarthquakeEng., 1988, (5) :381.
[43] CaiDanyi, LiAiqun, ChengWenrang. ParametricstudyofTLDswithBaffals[A].ProceedingsoftheSecondWorldConfer enceonStructuralControl[C].1998, (13) :121.
[44] SunLimin, ToshioKikuchi, YozoGoto, etal. Implementationoftunedliquiddamper (TLD) usingheavymud[A].ProceedingsoftheSecondWorldConferenceonStructuralControl[C].1998, (13) :147.
[45] FukudaT , OshimaN , SakamotoD . Tunedsloshingdamperus ingelectrorheologicalfluids[A].Proceedingsofthe7thInterna tionalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii.1999.
[46] AbeM , FujinoY , etal. Vibrationcontrolbyactivetunedliq uiddamperusingmagneticfluid[J].ASMEDesignEngineeringConference, 1997.
[47] GeorgeAFlores, ShengRongsheng, LiuJing. Medicalappli cationofMagnetorheologicalfluidApossiblenewcancertherapy[A].Proceedingsofthe7thInternationalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii, 1999, 716.
[48] MasatoAbe, Yozo, Fujino, etal. Tunedliquiddamper (TLD) withhighperformancefluids[A ].ProceedingsoftheSecondWorldConferenceonStructureControl[C].1998, (3) :131.
[49] DugYoungLee, NormanMWerdey. Quasi steadyherschel bulkleyanalysisofelectro andmagneto rheologicalflowmodedampers[A].Proceddingsofthe7thIntermationalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii, 1999, 579.
[50] GregoryJHiemenz, NormanMWerley. Seismicresponseofcivilstructuresutilizingsemi activeMRandERbracingsystems[A].Proceedingsofthe7thInternationalConferenceonElectroRheologicalFluidsandMagnetoRheologicalSuspensions[C].Honolulu, Hawaii, 1999, 657.