深海集矿机器人的自修正专家模糊控制
陈 峰1, 王随平1, 韩晓英2
(1. 中南大学 信息科学与工程学院, 湖南 长沙, 410083
2. 广州大学 实验中心, 广东 广州, 510405)
摘要: 深海底自行走履带集矿机器人作业过程, 受作业环境和集矿机器人自身的影响, 具有未知性、 随机性、 非线性等特性。 针对该复杂控制过程, 采用一种基于自修正专家模糊控制的路径跟踪控制方案, 控制深海履带机器人行走。 该方案参考履带车辆转向运动学方程, 结合深海集矿机器人工况参数和作业环境, 将履带车辆人工操作经验整合为专家规则, 构成专家系统, 实现机器车绝对速度和方位角的闭环控制; 采用具自调整功能的模糊算法, 对深海底履带集矿机器人的左、 右履带速度进行控制。 仿真结果验证了该方案的可行性和有效性。
关键词: 深海底; 机器人; 自修正; 专家模糊控制
中图分类号:B160 文献标识码:A 文章编号: 1672-7207(2005)06-1059-05
Self-adjustable expert fuzzy control of deep ocean mining robot
CHEN Feng1, WANG Sui-ping1, HAN Xiao-ying2
(1. School of Information Science & Engineering, Central South University, Changsha 410083, China
2. Experiment Center, Guangzhou University, Guangzhou 510405, China)
Abstract: Infulenced by environment and mining robot itself, deep seabed autonomous tracked mining robot has characteristics of being unknown, random and nonlinear, etc. In this paper, a self-adjustable expert fuzzy controller was presented to control deep seabed autonomous tracked mining robot and follow specified path. Based on tracked vehicle kinematical equation, combining deep seabed tracked mining robot working parameters and condition, some manual control experiences are intergrated as expert rule to realize its speed and azimuth closed-loop control. An adjustable fuzzy controller is used to control right and left tracked speed. Simulation results verify its feasibility and validity.
Key words: deep seabed; robot; self-adjust; expert fuzzy control
海洋多金属结核多分布在3~6km的深海底表层。 在6km深的海底, 压强高达60 MPa, 人不可能直接到海底进行操作。 深海底集矿机器人采用高压水射流对海底的多金属结核进行采集, 经过分选和破碎处理后, 以高压水泵通过软管将矿浆输送到中间舱。 然后, 通过6 km刚性管道, 采用泵送的方式将矿浆传送到海面的采矿船, 随结核一起被提升到洋面的深海废水则通过一根长管道排放到海面下一定深度, 以最大限度地减少污染。 集矿机器人在海底作业过程中, 会受到作业环境如深海沉积物土力学特性变化、 深海底层流状况、 输送软管随机扰动及集矿机器人行走驱动系统的非线性、 大滞后、时变特性等的影响。 这些作用在集矿机器人上的影响具有未知性、 随机性、 非线性和时变等特性, 对于这种复杂控制过程, 采用常规控制算法很难达到其控制要求[1-4]。 而模糊控制技术的优越性在于不需要知 道复杂的数学模型, 只需根据经验和规则即可实现控制。 由于集矿机器人工况参数和深海底环境的不确定性, 简单的模糊控制不能满足其要求[5], 在此, 本文作者采用基于自修正专家模糊控制算法对集矿机器人进行控制, 并用MATLAB进行仿真实验。
1 深海底集矿机器人自行走自修正专家模糊控制
1.1 履带集矿机器人自行走专家模糊控制
履带车辆只能通过左、 右履带的速度差实现转向。 由于转向所需的横向摩擦力由车辆的线速度和角速度共同决定, 侧向力平衡方程表现为不可积微分约束, 这导致履带车的路径规划和路径跟踪控制之间出现耦合, 使得履带车与轮式车辆相比自主行走更加困难。 深海履带集矿机器人工作于6 km海底, 受到深海沉积物土力学特性及软管随机扰动的影响, 控制更为困难。 履带车辆的人工操作方法比较成熟, 操作人员(专家)可根据经验控制履带车按预定轨迹行走[6]。 这里将履带车辆人工操作经验整合为专家规则, 参考履带车辆转向时的运动学方程, 构成专家系统, 根据航向角偏差和速度偏差, 实时给定左、 右履带速度。 但基于专家规则调节集矿机器人速度的控制未能构成左、 右履带速度闭环, 不能实现对左、 右履带速度精确调节。 且深海集矿机器人采用液压驱动, 液压驱动的履带车辆表现为强烈的非线性和滞后性, 采用常规的控制系统很难达到其要求[7]。 模糊控制算法不需要系统数学模型, 能够对复杂非线性系统实现精确控制。 基于调节的快速性和精确性, 这里构造了一个自修正模糊控制器, 构成速度闭环, 实时控制集矿机器人左、 右履带速度。 控制结构如图1所示, 其中: α0为履带给定航向角; v0为给定速度; α和v分别为航向角和速度的检测值; vL和vR分别为左、 右履带检测速度。 当集矿机器人按给定路径行走时, 若行走方向或速度存在偏差, 则首先通过专家系统按一定规则给出左、 右履带速度设定值, 然后, 通过模糊控制器对左、 右履带速度进行调整。
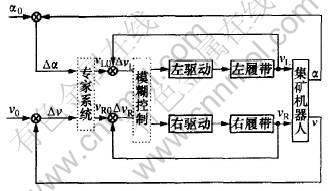
图 1 集矿机器人行走全自动调节原理图
Fig. 1 Mining robot expert-fuzzy control for path-tracking
1.2 履带车辆转向时的运动方程
履带车在水平转向时, 可考虑为二维运动模型[8]。 左、 右履带速度分别为vL和vR时, 集矿机器人质心的前进速度可近似表述为:

集矿机器人转向的角速度可近似表述为:

其中: B为履带中心距。 所以,
vL=v+φB/2;(3)
vR=v-φB/2。(4)
集矿机器人质心的位置为:
x=∫v(t)cosφ(t)dt;(5)
y=∫v(t)sinφ(t)dt。(6)
1.3 履带集矿机器人专家系统规则
由于深海底为极稀的软泥, 履带打滑严重且打滑率不易确定, 上述履带车的运动方程只能定性表示深海底履带集矿机器人的运动状态, 不能精确描述车体运动状态与左、 右履带实际速度之间的关系。 参考人工驾驶车辆的原理[9], 在此设计了根据航向角偏差Δα、 速度偏差Δv给定左、 右履带速度调节值vL0和vR0的专家规则, 具体规则如下。
a. 令Δvα为方位角偏差对应的左、右履带速度调节值, 针对方位角误差, 按以下规则对Δvα进行调整:
若|Δα|〈1°, 则Δvα=10sinΔα;
若|Δα|〈5°, 则Δvα=50sinΔα;
若|Δα|〈15°, 则Δvα=200sinΔα;
若|Δα|〈180°, 则Δvα=900sinΔα。
b. 根据速度偏差Δv和给定速度调节值Δvα调节左、 右履带速度:
vL0=v0+Δv+Δvα;(7)
vR0=v0+Δv-Δvα。(8)
2 控制器设计
深海底履带集矿机器人为全液压驱动, 具有强烈的非线性特征, 采用基于模型的控制算法难以取得精确的控制效果。 模糊控制器能克服非线性因素的影响, 对调节对象的参数有较强的鲁棒性。 模糊控制是以被控量的误差E和误差的变化率Ec为输入、 以U为输出而构成语言规则的, 这些规则的建立均以操作者的经验或实际数据为依据[10]。 液压系统具有强烈的非线性和滞后性, 很难总结出完整的经验, 要实现对左、 右履带速度的精确控制, 就必须用能够在线自修正的模糊控制。 基于规则参数β的集矿机器人行走模糊控制系统结构如图2所示。
基于规则参数β的模糊控制规则库由下式给出:
U=βE+(1-β)Ec。(9)
其中: 0〈β〈1, 称为加权因子或修正因子, 代表被控量的误差和误差率对获得控制器输出的加权程度。 控制系统在不同的状态下, 对控制规则中误差E与误差变化率Ec的加权程度有不同的要求。 当误差较大时, 控制系统的主要任务是消除误差, 此时对误差的加权应该大些; 当误差小时, 控制系统的主要任务是使系统尽快稳定, 减小超调, 此时要求在控制规则中误差变化率的加权大些。
为实现β的在线调整, 采用运筹学中的“优选法”进行在线修正[11, 12], 即
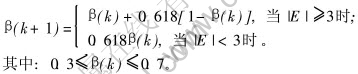

图 2 基于规则参数的集矿机器人行走
模糊控制系统结构
Fig. 2 Fuzzy control system structure of self-propelled mining robot based on rule parameter
本算法中, 系统误差定义为: e(k)=y(k)-r。
设E为其语言变量, 论域为[-6, +6]。 误差的变化率 (用Ec表示)定义为:
(用Ec表示)定义为:

Ec论域定义为[-3, +3]。
根据E的大小, 对β(k)进行在线自学习, 从而自动改变误差、 误差变化率的不同加权, 达到在线自动调整控制规则的目的。
3 控制规则自修正专家模糊算法的仿真
控制规则自修正专家模糊算法仿真系统方框图如图3所示[13, 14]。
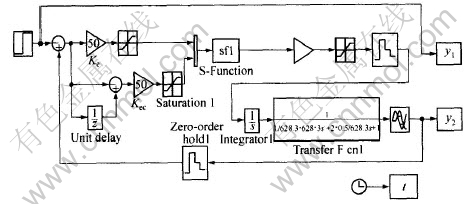
图 3 履带液压系统自修正专家模糊规则仿真系统
Fig. 3 Self-adjustable expert fuzzy rule simulation system of track hydraulic pressure control
图3中, 系统采用Fuzzy量化, 通过e×Ke, ec×Kec分别将误差e、 误差变化率ec(精确值)量化到其量化区间上[15]。 同时, 为了下一步模糊化, 进行 取整运算, 分别得到其量化值E和Ec。 系统采用反模糊量化, 通过KuU*将控制量的量化值反量化为精确值, 得到实际的控制量u。
利用MATLAB软件构造如图3所示的仿真系统, 对上述二维基于优选法的带修正因子的控制规则自修正专家模糊算法进行仿真研究。 图3中,S-function是模糊控制系统中带修正因子的控制规则自修正算法模块[16]。 被控对象采用具有纯滞后的集矿机器人履带液压控制系统, 输入采用单位阶跃信号, 仿真结果如图4所示。
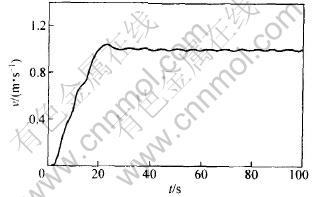
图 4 具有模糊规则自修正和专家系统的仿真结果
Fig. 4 Simulation result based on self-modify fuzzy rule and expert system
图4所示的仿真结果可以表明, 采用二维基于优选法的带修正因子的控制规则自修正专家模糊算法控制系统, 达到的性能为: 上升时间小于18 s(达到参考值的95%), 调节时间小于18 s, 超调量小于3.5%, 稳态误差小于0.5%, 系统仍有极限环振荡, 但其振幅小于0.5%, 大大地降低了极限环振荡对系统性能的影响, 满足系统的控制要求。
4 结 论
a. 针对集矿机器人工作环境的多变性特点和集矿机器人控制系统的各参数的时变性、 非线性、 纯滞后的特点, 提出控制规则自修正专家模糊控制策略。
b. 利用MATLAB进行仿真, 结果表明, 采用该方案能提高系统的控制精度, 控制性能明显比常规模糊控制性能好, 而且在跟踪给定值、 抑制扰动方面, 控制效果均较好。 该研究结果对履带机器车的运动控制也具有一定的指导意义。
参考文献:
[1]Deepak C R, Shajahan M A, Atmanand M A. Developmental tests on the underwater mining system using flexible riser concept[A]. The 4th ISOPE OMS Proceeding[C]. Hangzhou, 2001. 105-108.
[2]Handschuh R, Grebe H, Panthel J. Innovative deep ocean mining concept based on flexible riser and self-propelled mining machines[A]. The Forth ISOPE OMS Proceeding[C]. Hangzhou, 2001. 25-29.
[3]王随平. COMPACT-PCI IPC 用于深海集矿作业车两级控制系统[J]. 计算技术与自动化, 2002, 2: 37-39.
WANG Sui-ping. COMPACT-PCI IPC using in deep seabed mining vehicle in two grade control system[J]. Computing Technology and Automation, 2002, 2: 37-39.
[4]毛麟瑞. 大洋潜在的矿产资源与开发前景[J]. 地球, 1998(5): 17-20.
MAO Lin-rui. Potential mining resource and development prospect of ocean[J]. Earth, 1998(5): 17-20.
[5]李烘兴. 变论域自适应模糊控制器[J]. 中国科学E辑, 1999, 29(1): 32-42.
LI Hong-xing. Variable field about the adaptive fuzzy controller[J]. 1999, 29(1): 32-42.
[6]Merhof W, Hackbarth M. 履带车辆行驶力学[M]. 韩雪海, 刘侃, 周玉珑, 译. 北京: 国防工业出版社. 1989.
Merhof W, Hackbarth M. Tracked vehicle walking mechanics[M]. HAN Xue-hai, LIU Kan, ZHOU Yu-long, translated. Beijing: Press of National Defense Industry, 1989.
[7]吴光强, 王会义. 车辆静液驱动与智能控制系统[M]. 上海: 上海科学技术文献出版社, 1997.
WU Guang-qiang, WANG Hui-yi. Quiet Liquid Vehicle Driven and Intelligent Control System[M]. Shanghai: Press of Scientific Technical Literature of Shanghai, 1997.
[8]Wong J Y. Theory of ground vehicles[J]. New York: J Wiley, 1991.
[9]黄祖永. 地面车辆原理[M]. 李长祜, 陈德兴, 刘述学, 译. 北京: 机械工业出版社, 1983.
HUANG Zu-yong. Ground Vehicle Principle [M]. LI Chang-gu, CHEN De-xing, LIU Shu-xue, translated. Beijing: Press of Mechanical Industry, 1983.
[10 ]韩宝坤, 李晓雷, 孙逢春. 基于DADS的履带车辆多体模型与仿真[J]. 系统仿真学报, 2002, 11(14): 1531-1532.
HAN Bao-kun, LI Xiao-lei, SUN Feng-chun. Tracked vehicle multi-modeling and simulation based on DADS[J]. Systematic Emulation Journal, 2002, 11(14): 1531-1532.
[11]王世明, 黄永清, 李天石. 主从位置同步系统的规则参数自修正模糊控制[J]. 机械与电子, 1999, 5: 13-14.
WANG Shi-ming, HUANG Yong-qing, LI Tian-shi. Principal and subordinate position synchronous systematic regular parameter adjustable fuzzy control[J]. Machinery and Electron, 1999, 5: 13-14.
[12]余杰, 秦世引, 段建民. 基于Matlab命令方式的模糊控制系统仿真及可视化实现[J]. 计算机仿真, 2002, 19(3): 113-116.
YU Jie, QIN Shi-ying, DUAN Jian-min. Fuzzy control system simulation and realize visually based on Matlab order[J]. Computer Simulation, 2002, 19(3): 113-116.
[13]黄成静, 王琳, 马平, 等. 基于模糊逻辑工具箱的控制系统计算机仿真[J]. 计算机仿真, 2003, 20(2): 75-78.
HUANG Cheng-jing, WANG Lin, MA Ping, et al. Control system computer emulation on the basis of fuzzy logic toolbox [J]. Computer Simulation, 2003, 20(2): 75-78.
[14]Takagi T, Sugeno M. Fuzzy Identification of system and Its application to modeling and control[J]. IEEE Trans Syst Man Cyber, 1985, 15: 116-132.
[15]罗文广, 韩俊峰, 兰红莉. 基于MATLAB(SIMULINK)语言的模糊控制系统研究高级仿真[J]. 计算机仿真, 2001, 18(3): 15-16.
LUO Wen-guang, HAN Jun-feng, LAN Hong-li. Fuzzy control system based on MATLAB(SIMULINK) language studies advanced emulation[J]. Computer Simulation, 2001, 18(3): 15-16.
[16]诸静. 模糊控制原理与应用[M]. 北京: 机械工业出版社, 1995.
ZHU Jing. Fuzzy Control Principle and Application[M]. Beijing: Press of Mechanical Industry, 1995.
收稿日期:2005-01-10
基金项目: 国家自然科学基金资助项目(60505018); 国家海底区域研究开发“十五”项目(DY-105-03-02-06); 国家重点基础研究发展规划项目(2002CB312203)
作者简介: 陈 峰(1977-), 男, 河南信阳人, 博士, 从事机器人、 人工智能研究
论文联系人: 陈 峰, 男, 博士; 电话: 0731-8830394(O) ; E-mail: chfcsu@yahoo.com.cn

