Coordinated control method of intersection traffic light in one-way road based on V2X
来源期刊:中南大学学报(英文版)2019年第9期
论文作者:杜荣华 高凯 韩发荣 WEN Meng-fei(文孟飞) 李烁 周峰
文章页码:2516 - 2527
Key words:intersection; vehicle infrastructure cooperation; coordinated control; simulation evaluation
Abstract: One-way roads have potential for improving vehicle speed and reducing traffic delay. Suffering from dense road network, most of adjacent intersections’ distance on one-way roads becomes relatively close, which makes isolated control of intersections inefficient in this scene. Thus, it is significant to develop coordinated control of multiple intersection signals on the one-way roads. This paper proposes a signal coordination control method that is suitable for one-way arterial roads. This method uses the cooperation technology of the vehicle infrastructure to collect intersection traffic information and share information among the intersections. Adaptive signal control system is adopted for each intersection in the coordination system, and the green light time is adjusted in real time based on the number of vehicles in queue. The offset and clearance time can be calculated according to the real-time traffic volume. The proposed method was verified with simulation results by VISSIM traffic simulation software. The results compared with other methods show that the coordinated control method proposed in this paper can effectively reduce the average delay of vehicles on the arterial roads and improve the traffic efficiency.
Cite this article as: GAO Kai, HAN Fa-rong, WEN Meng-fei, DU Rong-hua, LI Shuo, ZHOU Feng. Coordinated control method of intersection traffic light in one-way road based on V2X [J]. Journal of Central South University, 2019, 26(9): 2516-2527. DOI: https://doi.org/10.1007/s11771-019-4191-7.

J. Cent. South Univ. (2019) 26: 2516-2527
DOI: https://doi.org/10.1007/s11771-019-4191-7

GAO Kai(高凯)1, HAN Fa-rong(韩发荣)1, WEN Meng-fei(文孟飞)2,DU Rong-hua(杜荣华)1, LI Shuo(李烁)3, ZHOU Feng(周峰) 3
1. College of Automotive and Mechanical Engineering, Changsha University of Science and Technology, Changsha 410114, China;
2. Hunan Provincial Research Institute of Education, Changsha 410005, China;
3. College of Electrical and Information Engineering, Changsha University of Science and Technology, Changsha 410114, China
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2019
Abstract: One-way roads have potential for improving vehicle speed and reducing traffic delay. Suffering from dense road network, most of adjacent intersections’ distance on one-way roads becomes relatively close, which makes isolated control of intersections inefficient in this scene. Thus, it is significant to develop coordinated control of multiple intersection signals on the one-way roads. This paper proposes a signal coordination control method that is suitable for one-way arterial roads. This method uses the cooperation technology of the vehicle infrastructure to collect intersection traffic information and share information among the intersections. Adaptive signal control system is adopted for each intersection in the coordination system, and the green light time is adjusted in real time based on the number of vehicles in queue. The offset and clearance time can be calculated according to the real-time traffic volume. The proposed method was verified with simulation results by VISSIM traffic simulation software. The results compared with other methods show that the coordinated control method proposed in this paper can effectively reduce the average delay of vehicles on the arterial roads and improve the traffic efficiency.
Key words: intersection; vehicle infrastructure cooperation; coordinated control; simulation evaluation
Cite this article as: GAO Kai, HAN Fa-rong, WEN Meng-fei, DU Rong-hua, LI Shuo, ZHOU Feng. Coordinated control method of intersection traffic light in one-way road based on V2X [J]. Journal of Central South University, 2019, 26(9): 2516-2527. DOI: https://doi.org/10.1007/s11771-019-4191-7.
1 Introduction
With rapid development of world economy, the number of vehicles in the city has increased significantly, and traffic congestion has become increasingly serious. Many countries have vigorously promoted the construction of transportation infrastructure, with the aim of improving the overall traffic conditions of urban roads. However, this kind of initiative not only occupies a large amount of land resources in the city, but also leads to huge construction costs. To solve these problems, it is crucial to make full use of road resources by adopting reasonable and scientific traffic management methods [1]. As a simple, effective and economical road management measure, one-way traffic can fully exploit road traffic resources and effectively solve the problem of traffic congestion [2]. The one-way traffic has been adopted in many countries to ease urban traffic congestion, such as the United States and Japan. Many cities in China have used the one-way traffic to improve the utilization of urban roads, such as Qingdao and Shanghai [3]. According to the relevant statistics, foreign one-way roads can improve the capacity of 20%-80%, and the domestic ones can reach 15%-50% [4]. Therefore, the utilization of one-way traffic is of great significance to solve the urban traffic problems.
As an important node in the urban road network, the intersection is an important prerequisite for relieving urban traffic pressure [5]. However, the traditional single-point intersection optimization model can only improve the urban traffic problem locally, and cannot achieve the large-scale and high-efficiency traffic management. Due to intensive land development, the distance between the upstream and downstream intersections in the urban road network is usually relatively close, and the traffic volume is usually large. When the distance between adjacent intersections controlled by traffic lights is short, it is necessary to coordinate the green light-on time and signal timing scheme of traffic lights at adjacent intersections so that the vehicle can efficiently pass two or more adjacent intersections [6].
With the advanced wireless communication and Internet technology, vehicle infrastructure cooperation system carries out dynamic real-time information interaction of vehicles, vehicles and infrastructures, and carries out active safety control and road coordinated management on the basis of full-time dynamic traffic information collection and integration. The traffic safety and efficiency can be improved by implementing the effective cooperation of people and vehicles [7, 8]. Meanwhile, the vehicle infrastructure cooperation system as the cutting-edge technology of intelligent transportation has great potential in traffic control and will become an important means to alleviate urban traffic pressure and improve the urban traffic environment [9-11].
This paper proposes a multi-intersection coordinated control method suitable for one-way driving roads. The method is based on wireless communication vehicle networking (V2X) technology to collect traffic information of each intersection of the arterial road, and information transmission and sharing between the upstream and downstream intersections. The offset between intersections and clearance time are calculated while determining the optimal green duration of each intersection in real time, so as to implement the coordinated control of the one-way road. The contributions of this paper are threefold: 1) Adaptive signal control system is adopted for each intersection in the coordination system, and the green light time is adjusted in real time based on the number of vehicles in queue; 2) Traffic information can be transmitted and shared among intersections, and the offset and clearance time can be adjusted according to the real-time traffic volume; 3) The model proposed in this paper is a distributed control system with simple structure, which reduces the cost of data processing in the control center.
This paper is organized as follows. In Section 2 a short related work on different intersection control methods, specifically focusing on coordination control models is presented. Section 3 introduces the technology of traffic flow information detection and transmission based on V2X. Next, the one-way road coordination control method is proposed in Section 4. Section 5 reports the results of simulation and comparison. Finally, Section 6 presents the conclusions of this paper and suggestions of future work on this particular topic.
2 Related work
The signal control of the single-point intersection is based on the traffic signal control model. This control method can alleviate traffic congestion and reduce the accident rate by reasonably changing the color of the signal light [6]. An adaptive traffic signal control system based on vehicle-vehicle communication is proposed in Ref. [12]. A clustering algorithm was defined to estimate the vehicle density at the intersection entrance, and then determine the optimal cycle time of the intersection. An adaptive control strategy based on K-nearest short-term traffic flow prediction is proposed in Ref. [13]. According to the historical traffic flow data of intersections, the traffic flow in the next 5 min is predicted and the signal cycle is calculated and the control model is established, which effectively improves the traffic efficiency of intersection. In order to make full use of digital data and optimize intersection signal parameters, the theoretical distribution of the vehicle’s road travel time is analyzed and the total travel time is selected as the optimization goal to optimize signal cycle and green splits [14]. A distributed cooperative reinforcement learning- based traffic control that integrates V2X networks’ dynamic clustering algorithm is presented in Ref. [15]. The dynamic clustering algorithm is proposed to obtain traffic flow information accurately and instantaneously. In addition, HU et al [16, 17] proposed optimal route algorithm and real-time shortest path algorithm considering traffic light and energy consumption to improve traffic efficiency at intersections. However, the optimization of single- point control cannot be able to satisfy the increasingly complex urban traffic environment, and it is impossible to alleviate the traffic pressure of the road network as a whole. Therefore, the arterial coordinated control system has become the focus of more researchers in the community.
A variety of arterial coordination control approaches have been proposed to improve the traffic efficiency in the past few decades. In general, these approaches can be classified into two categories. The first category aims at generating a bandwidth maximization model. A variable bandwidth progression model is proposed in Ref. [18]. An individually weighted bandwidth is distributed to each directional road section. A two-way bandwidth maximization model is designed to maximize the total bandwidth and introduces a bandwidth proration impact factor [19]. A coordination methodology for arterial traffic signal control based on a two-way bandwidth maximization model is proposed in Ref. [20]. The queuing process is considered in this method and the queue clearing time is calculated based on the explicitly estimated queue length of each approach of the coordinated arterial road before the green light starts at each cycle. An urban arterial road coordination control method based on graphic method is proposed in Ref. [21]. By drawing the time-distance figure for each signal phase, the optimal control scheme is finally determined. A signal control decision model based on coordination rate is proposed in Ref. [22]. According to the relationship between parameters in traffic flow theory, the definition and calculation formula of phase coordination rate are given. The model takes phase split, vehicle queue length, upstream traffic flow speed as the input variable, and signal cycle and phase green light starting point as the output variables, which significantly improves the traffic efficiency between adjacent intersections. A tri-level programming model for combined urban traffic signal control and traffic flow guidance is established in Ref. [23]. A case study is raised to show the efficiency and applicability of the proposed modelling and computing method. A method for determining the maximum green wave band of the arterial road by using the double objective function is proposed in Ref. [24], and optimizing the effect of coordinated control by increasing the utilization of the green time. In addition, the research also extended the proposed method to the coordinated control of the simple road network, and achieved good results.
The other category is to suggest vehicle acceleration or deceleration through multiple intersections with speed guidance to achieve the arterial green wave control [25, 26]. Reasonable speed guidance can reduce the average stop time and total fuel consumption during the process that each vehicle fleet passes through multi-intersections. A speed guidance strategy is proposed in Ref. [27] to study the effects of multiple signal lights on the driving behavior and the fuel consumption during the process that each vehicle runs across multi-intersections and experimental results demonstrate the effectiveness of the proposed method. A decentralized cooperative adaptive cruise control algorithm using V2X for vehicles in the vicinity of intersections (CACC-VI) is proposed in Ref. [28]. This algorithm is designed to improve the throughput of intersection by reorganizing the vehicle platoons around it, in consideration of safety, fuel consumption, speed limit, heterogeneous features of vehicles, and passenger comfort.
However, the methods mentioned in these papers generally have some shortcomings, which can be summarized as the following three points: 1) The cycle of coordinated control system is determined by the key intersection, but it is not the optimal cycle for some intersections in the system [29]; 2) The parameters of the control system such as cycle, green signal ratio and offset are determined by historical data, which cannot satisfy the traffic flow changing in real time; 3) The model is complex, and data processing power of control system is relatively high.
Motivated by the previous research, this paper proposes a one-way driving road coordination control method based on V2X (CCM-V). This method is different from the above research. Adaptive control mode is adopted for each intersection to adjust the green light duration with real-time traffic flow data. When calculating the offset between adjacent intersections, the clearance time of vehicles in queuing is taken into account to reduce the impact of these vehicles on the system.
3 Traffic flow information detection and transmission based on V2X
In order to satisfy the dynamic traffic flow and find optimal green light timing scheme, it is especially important to find a real-time and accurate traffic information collection method. This paper uses V2X technology based on wireless communication to collect traffic information, and its core is LTE-V communication technology based on 4G. The technology supports large bandwidth and large coverage communication, and can effectively collect various data for traffic signal optimization, and satisfy the requirements of real- time and accuracy [30].
3.1 Assumptions
The information detection and transmission method proposed in the paper assumes that each vehicle participating in the coordinated control is equipped with an in-vehicle digital map to ensure that the roadside units can determine the travel direction of the vehicle at the intersection. In addition, it is assumed that each vehicle is equipped with at least one vehicle wireless transmission device to ensure that the vehicle can transmit its own information (such as ID, vehicle speed, direction information, etc.) to the roadside equipment in real time.
3.2 Traffic flow detection
The traffic flow detection at the intersection needs to collect three sets of data, including: 1) the number of queued vehicles in each lane group of the main road at the intersection (left turn, straight, right turn lane group); 2) the number of queued vehicles on the branch entrance road; 3) the speed that the straight vehicles depart from an intersection. The number of vehicles in main road is determined by the direction information transmitted by vehicle, and the driving speed can be obtained by vehicle’s own speed sensor.
Figure 1 shows a schematic diagram of traffic flow detection. The area between initiating point and parking line is the detection range of inlet road. The range can be determined by the maximum queue length of entrance channel of the intersection. When vehicle reaches the initiating point, LTE-V communication technology is used to transmit information to the roadside unit to indicate that the vehicle requires intersection access right, information including the vehicle ID and direction information (to be turned left, right, or straight). The roadside unit simply processes the received data and groups all the vehicles. As shown in Figure 1, the green is left turn group, the red is straight group, and the light blue is right group. The roadside unit finally sends this information to signal controller, and the controller regulates intersection signal timing by determining the key lane group. At the same time, roadside unit will record the speed of straight vehicle when it passes through the intersection. The vehicles of branch road (navy blue vehicle in Figure 1) sends its information to signal controller in the same way to obtain the pass permission.
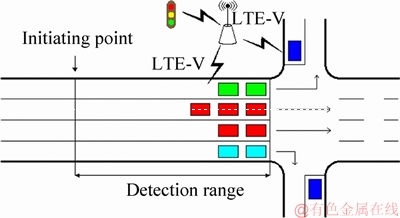
Figure 1 Traffic flow detection
3.3 Information transmission
In order to determine optimal green duration of each intersection and signal coordination control scheme for one-way road, real-time information transmission and sharing are required for upstream intersection and downstream intersection as shown in Figure 2. This paper is based on LTE-V communication technology to implement traffic information transmission between upstream and downstream intersections. There are three main groups of information: 1) the number of vehicles passing straight at the upstream intersection; 2) the moment that upstream intersection signal light starts to turn green; 3) the speed of straight vehicle.
Remark 1: Benefiting from V2X based on LTE-V and other sensors, the numbers of vehicles, travelling speed and the information of traffic lights can be derived conveniently, which are useful to design coordination strategy to signal optimization.
Figure 2 shows a schematic diagram of information transmission. The roadside unit is set up between upstream and downstream intersections. The distance between roadside units is determined according to its transmission range. When straight vehicles leave from upstream intersection, roadside unit will send the number of straight vehicles, the green light starting point of upstream intersection, and the speed of straight vehicle to downstream intersection controller through the LTE-V communication technology to ensure that it makes a pass decision timely.
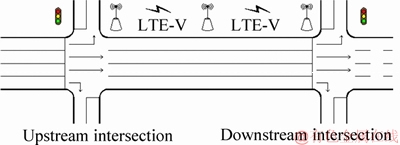
Figure 2 A schematic diagram of information transmission based on V2X
The traffic information detection and transmission method based V2X requires that the roadside units have certain information processing and analysis capabilities, and requires the signal controllers have powerful data calculation capability.
4 One-way road coordination control method
4.1 Green light time
In order to make up for the fact that traditional coordination control method cannot guarantee the best effect of all intersections, this paper adopts the real-time adaptive timing strategy and uses traffic information acquired by LTE-V communication technology to improve coordinated control effect of the whole system. The two-phase control scheme is adopted for all intersections in the coordinated control system. The first phase is main road and the second phase is branch road, as shown in Figure 3.
Green light time allocates at the first intersection: the first intersection is the starting point of whole system. It is recommended that vehicles enter the system in form of a group to achieve higher operating efficiency. Therefore, the allocation ratio of main and branch green light is set as 50:50. When this value is set in actual environment, it can be based on the traffic flow ratio of the main road and the branch road. Without loss of generality, the ratio is set as 50:50 for the first intersection of one-way road in this work. The vehicles are assumed to arrive at in a Poisson distribution and the average saturated headway time is h, and then the green light duration T1 of first intersection is determined by Eq. (1),
 (1)
(1)
where Q is the maximum number of queued vehicles in all of the lanes(includes straight, turn right and turn left) and Q is defined as follows:
 (2)
(2)
and,
 (3)
(3)
 (4)
(4)
where n is the number of lanes at this intersection; tloss is the start loss time; ts is the time required for a saturated fleet to accelerate through the stop line after the green light starts; tc is the time required for the saturated fleet to pass the stop line at a constant speed; ti is the time that the ith vehicle passes the stop line. The green light time in the branch direction is the same as the direction of main road, and yellow light time is unified to 3 s [6].

Figure 3 Phase scheme
Green light time allocates at the downstream intersections: the green light time allocation of main direction at downstream intersections is divided into two cases. The first case is that downstream entrance lanes have no other vehicles waiting except the upstream fleet approaching the intersection. In this case, it only needs to consider the time required for the fleet to pass through the intersection at a constant speed. The second case is that other vehicles from branch roads or roadside parking zone are waiting in lanes before upstream fleet arrives, so these vehicles may miss the green light and have to stop waiting for the next cycle. At this time, it is necessary to consider not only the time required for the fleet to pass the intersection, but also the clearance time of these roadside vehicles. Of course, the start loss time also needs to be considered. The calculation methods are as follows.
There is no waiting vehicle:
 (5)
(5)
There are waiting vehicles:
 (6)
(6)
where Q is the maximum number of queued vehicles from branch roads or roadside parking zone; q is the average number of vehicles of single lane from upstream intersection; h is the average saturated headway time; and tloss is the start loss time. When there is no vehicle in the direction of main road, if the controller receives a demand from vehicles of branch road, the corresponding green light duration is allocated to branch according to Eq. (1). Otherwise, the main road is kept green light.
4.2 Offset between adjacent intersections
The arterial road of one-way driving is shown in Figure 4. In order to reduce the stopping time at intersections, it is better for the vehicles to travel through the intersections with green light. If suitable offset is set between adjacent intersections, the vehicles can travel through the adjacent intersections without stopping. It is assumed that there is no parking stop in downstream intersection of the system. The length between upstream and downstream intersection is Li, and the speed of vehicle group is Vi. Then the offset  between adjacent intersections can be determined by Eq. (7),
between adjacent intersections can be determined by Eq. (7),
 (7)
(7)
However, sometimes individual vehicles at the tail of group occasionally miss the green light at the intersection and have to stop waiting for green light of next cycle. In addition, during red light there will be some vehicles that turn in from the branch road and enter from the roadside parking area. These vehicles are already parked in front of parking line before the arrival of vehicles from upstream intersection. The influence of these queued vehicles must be considered when calculating offset, and the Eq. (7) is adjusted to obtain optimal offset  The adjusted formula is as follows:
The adjusted formula is as follows:
 (8)
(8)
where tloss is the start loss time of first downstream intersection. When calculating the optimal offset using Eq. (8), we usually consider the start loss time of queuing vehicle once because offset is additive and the start loss time will be automatically calculated in the offset of all subsequent sections. The time-distance figure before and after adjustment is shown as Figures 5 and 6.
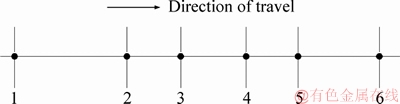
Figure 4 One-way arterial road

Figure 5 Coordination control effect before adjustment
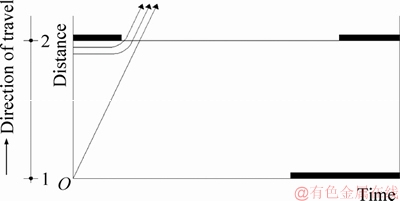
Figure 6 Coordination control effect after adjustment
If we set the start time of green light at intersection 1 as t1, and set the start time of green light at intersection i as ti, the green light time and offset between adjacent intersections is defined in Sections 4.1 and 4.2. Based on these works, we can control and program the intersection signal equipment as Eq. (9), green light start time,
 (9)
(9)
In the time-distance curves shown in Figures 5 and 6, the black part is red light duration, the blank part is green light duration, and the curve slope indicates vehicle travel speed. From the comparison of the two figures, it can be seen that after the green light start time of downstream intersection is properly adjusted, the queuing vehicles at downstream intersection can leave early and the upstream vehicle that arrives at downstream intersection can directly pass through intersection without parking. This significantly reduces travel delay of vehicles and improves traffic efficiency. The architecture of CCM-V is shown in Figure 7.
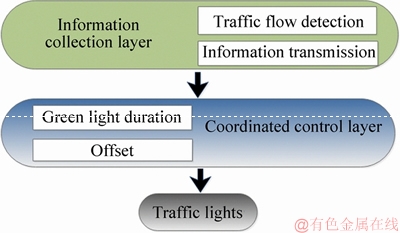
Figure 7 Architecture of CCM-V
For any intersection, we can program the signal lights as algorithm 1.
Algorithm 1 Coordinated control algorithm of intersection traffic light
Input: Qi, maximum number of queued vehicles in all of the lanes at intersection i; qi-1, number of vehicles from upstream intersection; i, number of the intersection; h, saturated headway time; tloss, start loss time; ts, the time required for a saturated fleet to accelerate through the stop line after the green light starts; tc, the time required for the saturated fleet to pass the stop line at a constant speed;  , optimal offsety from intersection i-1 to intersection i;
, optimal offsety from intersection i-1 to intersection i;
Output:
1:
ti, start time of green light at intersection;
2:
Ti, green light time at intersection i;
3:
Algorithm begin:
4:
5:
for the first intersection, start time of green light is t1. The green light duration T1 can be gained by,
6:
T1=(Q-1)×h+tloss
7:
where tloss=ts-tc,
8:

9:
for any intersection i, the start time of green light can be gained by,
10:
 (i=2, 3, …)
(i=2, 3, …)
11:
where  and tloss1 is the start loss time of first downstream intersection and usually set as 2 s.
and tloss1 is the start loss time of first downstream intersection and usually set as 2 s.
12:
For the downstream intersections, green light time Ti can be calculated by the following equation,
13:
If Q==0 then
14:
Ti=(q-1)×h
15:
else
16:
Ti=(Q+q-1)×h+tloss
17:
End if
18:
Return ti, Ti
19:
Algorithm end
Remark 2: It is obvious that algorithm 1 is fully distributed and depends on local information. So, it is scalable for any numbers of intersections.
5 Simulation and evaluation
5.1 Simulation
A six-intersection simulation scenario shown in Figure 8 is used to evaluate the effect of proposed strategy. The simulation is performed on VISSIM traffic simulation software. In order to address the performance of coordination control method based on V2X (CCM-V), it is compared with key cycle coordination control method (KCCC) and graphics-based coordination control method (CCM-G) [20]. KCCC is also known as the Webster coordinated control method. The key cycle is the optimal signal cycle with the smallest delay [6]. The average queue length, average delay, average stop time and the average number of stops are used as evaluation indicators. The simulation results are compared and analyzed in Section 5.2.
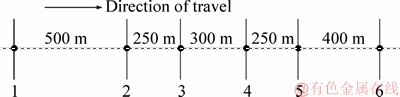
Figure 8 Software simulation environment
Remark 3: Intersection 1 in Figure 8 is the starting point of coordinated control and is not considered in the analysis of simulation results.
In the simulation, the phase scheme of each intersection is set as shown in Figure 3. The traffic volume of main road is set as 600 pcu/h per lane and branch road is set as 100 pcu/h per lane. There are four lanes on the main road and two lanes on the branch road. The start loss time of queue is set as 2 s and the simulation cycle is set as 1 h. All other parameters, such as driving behavior model, road width, saturation flow rate of each lane, traffic configuration are utilized the default settings in Vissim. According to the Webster cycle formulation, we can calculate the optimal cycle of KCCC and CCM-G as 30 s. The duration of green light is determined according to the ratio of traffic flow and offset is calculated by length of road and average travel speed. The CCM-V uses the simulation platform technology integrated with Vissim-Excel_ VBA-Matlab [31] to simulate in the same traffic environment except the cycle and offset.
The software integration is realized by taking Excel as the main control program, which directly calls the Vissim program through the COM interface. Matlab engine is controlled through Excel Link interface. The proposed algorithm is running on Matlab. The structure of simulation platform is shown as Figure 9.
In the integrated simulation platform, Vissim object and its sub-objects are defined and created in Excel_VBA. Then, the Vissim traffic state information is obtained after running the Vissim and Matlab software and loading Vissim network. The traffic information is transmitted to Matlab for processing the data. Matlab generates the optimal control scheme and the control scheme is applied to the signal control of Vissim. Finally, an integrated simulation platform is built, which can make the simulation process repeat as the setting parameter.
5.2 Analysis and evaluation
In Vissim, queue counters and travel time sections are set in every lane to collect real time evaluation results. The analyses of simulation results about these methods are shown in the figures below, including queue length at the intersections, delay, stop time and the number of stops.
Remark 4: 1) Calculation method of average queue length: the current queue length is recorded in each simulation step and the arithmetic mean value of all queue lengths measured within the detection time interval is calculated. 2) Calculation method of average delay: the difference between the actual travel time and the theoretical travel time. 3) Calculation method of average time of stops: the ratio of the total stop time of all vehicles to the total number of vehicles within the detection time interval. 4) Calculation method of average number of stops: the ratio of the total stop number of all vehicles to the total number of vehicles within the detection time interval.
Remark 5: s/pcu is the time required for a standard vehicle and n/pcu is stop times of a standard vehicle.
The simulation results of KCCC, CCM-V and CCM-G are shown in Figures 10-13. As shown in Figure 10, the average queue length of CCM-V is zero except few detection nodes, which indicates that this method meets the expectation of vehicles passing through multiple intersections without stopping. Compared with KCCC and CCM-V, the CCM-V significantly reduces the driving delay of vehicles at intersections in Figure 11. Although there is some short stop time in Figures 12 and 13, the control performance is still obvious. The main reason for small stops is that some vehicles enter the main road from the branch road or side parking zone and these vehicles are forced to stop and wait because they miss the green light.
In a word, the simulation results reveal the effectiveness of CCM-V in one-way arterial road.
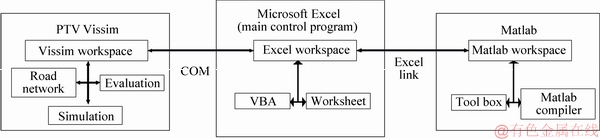
Figure 9 Vissim-Excel_VBA-Matlab simulation platform
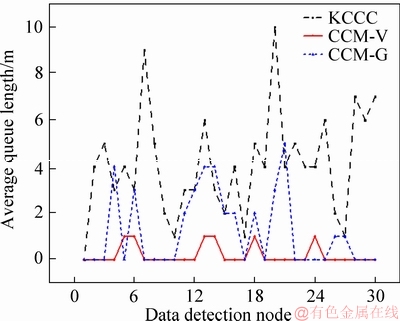
Figure 10 Average queue length of coordination control system
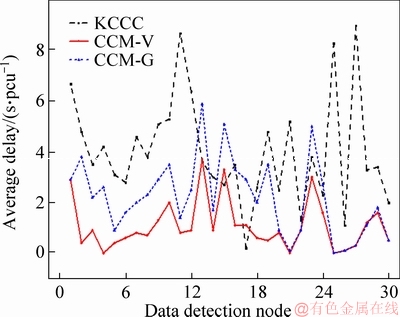
Figure 11 Average delay of coordination control system
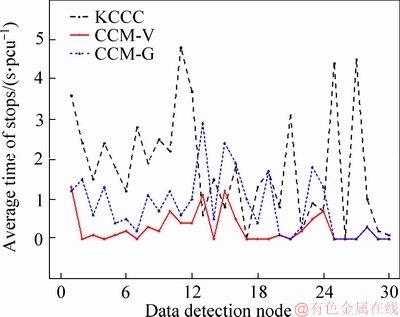
Figure 12 Average time of stops of coordination control system
On one hand, the method does not uniformly set the cycle of each intersection in the system, and adopts the adaptive control mode based on the real-time traffic volume. On the other hand, when determining the offset between adjacent intersections, the clearance time of entrance lanes should be taken into account to avoid some waiting vehicles forcing the upstream fleet to slow down or stop. Obviously, KCCC and CCM-G do not take these two aspects into consideration.
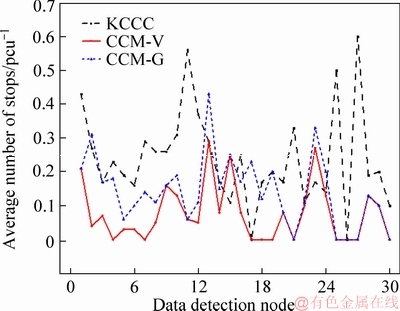
Figure 13 Average number of stops of coordination control system
5.3 Consideration on effects of disturbance
Although the proposed CCM-V has promising performance under the premise of assumptions, it is inevitable to be affected by some external disturbances in the actual cases, which may cause the control effect not good as expected.
The main disturbance is the effect of vehicles driving from branch roads or roadside parking zone on the main road fleet. When there are some disturbance vehicles, they may clash with the fleet as they enter the main road, which forces the fleet to slow down. The offset is calculated based on average speed of fleet. The joined vehicles may delay some vehicles at the end of fleet to miss the green light. In the simulation, two cases were investigated, including 100 pcu/h per lane and 300 pcu/h per lane, which is disturbance for the main road fleet.
Tables 1-3 show the effect of driving in vehicles disturbance on the coordination control methods. Compared with the performance of 100 pcu/h disturbance vehicles, all the evaluation indicators of 300 pcu/h (such as average queue length) at intersection also increase after the interference increases. There are two reasons for this effect. The first reason is that some vehicles in the fleet miss the green time and cause delays. The second reason is that the traffic lights are red when the vehicles from branch roads or roadside parking zone arrive at the intersection. These vehicles may not arrive at the intersection at the same time as the fleet and then they had to stop and wait. But it is obvious that the proposed CCM-V performs better than CCM-G and KCCC at the same disturbance. So, CCM-V proposed in this manuscript is robust to the disturbance in actual traffic scenario.
Table 1 Effect of driving in vehicles disturbance on KCCC
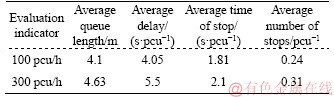
Table 2 Effect of driving in vehicles disturbance on CCM-V
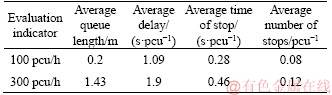
Table 3 Effect of driving in vehicles disturbance on CCM-G

Figures 14-17 show the detailed simulation results after increasing disturbance vehicles to 300 pcu/h. In the previous analysis, although the performance of CCM-V decreases with the driving in vehicles disturbance, it can be seen from the figures above that the performance of CCM-V is still better than the KCCC and CCM-G with the same disturbance. The reason is that CCM-V is incorporated by real time traffic states, while KCCC and CCM-G cannot manage these disturbances.
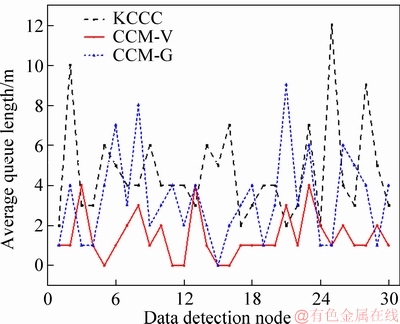
Figure 14 Average queue length with driving in vehicles disturbance

Figure 15 Average delay with driving in vehicles disturbance
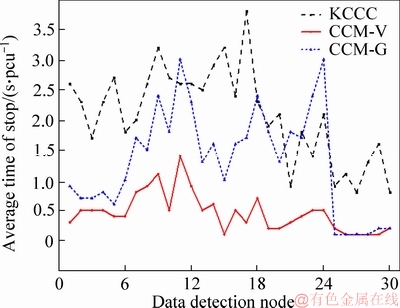
Figure 16 Average time of stops with driving in vehicles disturbance

Figure 17 Average number of stops with driving in vehicles disturbance
6 Conclusions
This paper proposes an arterial coordination control method based on V2X technology, which is suitable for one-way roads with large traffic flow. The simulation results show that the adaptive control mode at each intersection in the system has lower traffic delays than the uniform cycle setting, and is more adaptable to the dynamic traffic flow. In addition, the comparison results with other methods show that it is significant to consider the clearance time of vehicles in entrance lanes when calculating the offset. This consideration avoids the situation that the upstream fleet needs to slow down or stop when arriving at the intersection, and effectively reduces the stop time of fleet.
However, the model may be affected by some external disturbances in the actual environment. For example, this paper assumes that all vehicles participating in coordinated control are connected vehicles equipped with at least one wireless transmission device. When some vehicles are unconnected or on-board equipment fails, the allocation of green time will be deviated, which will lead to poor coordination and control effect. Moreover, the speed of fleet will be affected if there are more vehicles entering the main road from branch road or side parking zone, which causes that the offset determined by the system will be inconsistent with the reality. When these external disturbances are large, the impact on the system is not negligible. This may be an interesting question that needs further investigation.
References
[1] PAPAGEORGIOU M, DIAKAKI C, DINOPOULOU V. Review of road traffic control strategies [J]. Proceedings of the IEEE, 2003, 91(12): 2043-2067. DOI: 10.1109/JPROC. 2003.819610.
[2] WU Yu-ru. The influence and comprehensive evaluation of one-way traffic on urban traffic [D]. Chengdu, China: Southwest Jiaotong University, 2012: 1-4. http://cdmd.cnki.c om.cn/Article/CDMD-10613-1012391017.htm. (in Chinese)
[3] LI Jia-tong. Research on one-way traffic organization optimization of microcirculation road network in old city [D]. Beijing, China: Beijing Jiaotong University, 2017: 1-4. http://cdmd.cnki.com.cn/Article/CDMD-10004-1017086663.htm. (in Chinese)
[4] LI Yong-liang, LI Tao. Analysis of one-way traffic design ideas and advantages and disadvantages of municipal roads [J]. Planning and Design, 2016, 25: 79-80. http://www. cnki.com.cn/Article/CJFDTotal-JCYS201625050.htm. (in Chinese)
[5] CHEN Lei. Cooperative intersection management: A survey [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(2): 570-586. DOI:10.1109/TITS.2015.2471812.
[6] CHEN Jun, XU Liang-jie. Traffic management and control [M]. Beijing: China Communications Press, 2012: 277-287. (in Chinese)
[7] CHEN Chao, LV Zhi-yong, FU Shan-shan. A survey of development status of the domestic and foreign vehicle infrastructure cooperative system [J]. Traffic Information and Safety, 2011, 29(1): 102-109. DOI: 10.3963/j.ISSN 1674- 4861.2011.01.025. (in Chinese)
[8] GAO Kai, HAN Fa-rong, DONG Ping-ping. Connected vehicle as a mobile sensor for real time queue length at signalized intersections [J]. Sensors, 2019, 19(9): 2059. DOI: https://doi.org/10.3390/s19092059.
[9] OLIA A, ABDELGAWAD H, ABDULHAI B. Assessing the potential impacts of connected vehicles: Mobility, environment, and safety perspectives [J]. Journal of Intelligent Transportation Systems: Technology, Planning, and Operations, 2016, 20(3): 229-243. DOI: https://doi.org/ 10.1080/15472450.2015.1062728.
[10] PEREIRA A. Traffic signal control for connected and non-connected vehicles [R]. Prague, Czech Republic: 2018 Smart City Symposium Prague (SCSP), 2018: 1-6. DOI: 10.1109/SCSP.2018.8402656.
[11] GULER S, MENENDEZ M, MEIER L. Using connected vehicle technology to improve the efficiency of intersections [J]. Transportation Research Part C, 2014, 46: 121-131. DOI: https://doi.org/10.1016/j.trc.2014.05.008.
[12] MASLEKAR N, MOUZNA J, BOUSSEDJRA M. CATS: An adaptive traffic signal system based on car-to-car communication [J]. Journal of Network and Computer Applications, 2013, 36: 1308-1315. DOI: https://doi.org/10. 1016/j.jnca.2012.05.011.
[13] XU Jian-ming, LI Gui-lin, ZHAI Chun-jie. Adaptive signal control of single intersection based on short-term traffic flow prediction [J]. Journal of Chongqing Jiaotong University, 2017, 1(1): 1-5. DOI: 10.3969/j.issn.1674-0696.2018.09. (in Chinese)
[14] LI Mao-sheng, XUE Hong-li, SHI Feng. Optimization of traffic signal parameters based on distribution of link travel time [J]. Journal of Central South University, 2017, 24(2): 432-441. DOI: 10.1007/s11771-017-3445-5.
[15] LIU Wei-rong, QIN Gao-rong, HE Yun. Distributed cooperative reinforcement learning-based traffic signal control that integrates V2X networks’ dynamic clustering [J]. IEEE Transactions on Vehicular Technology, 2017, 66(10): 8667-8681. DOI:10.1109/TVT.2017.2702388.
[16] HU Lin, ZHONG Yuan-xing, HAO Wei. Optimal route algorithm considering traffic light and energy consumption [J]. IEEE Access, 2018, 6: 59695-59704. DOI: 10.1109/ ACCESS. 2018.2871843.
[17] HU Lin, YANG Jia, HUANG Jing. The real-time shortest path algorithm with a consideration of traffic-light [J]. Journal of Intelligent & Fuzzy Systems, 2016, 31(4): 2403-2410. DOI:10.3233/JIFS-169081.
[18] NATHAN H, SUSAN F, FERNANDO L. A multi-band approach to arterial traffic signal optimization [J]. Transportation Research Part B, 1991, 25(1): 55-74. DOI: https://doi.org/10.1016/0191-2615(91)90013-9.
[19] LU Kai, ZENG Xiao-si, LILin. Two-way bandwidth maximization model with proration impact factor for unbalanced bandwidth demands [J]. Journal of Transportation Engineering, 2011, 138(5): 527-534. DOI: 10.1061/(ASCE)TE.1943-5436.0000352.
[20] YE Bao-lin, WU Wei-ming, MAO Wei-jie. A two-way arterial signal coordination method with queuing process considered [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 3440-3452. DOI: 10.1109/TITS.2015.2461493.
[21] ZHOU Jun. Traffic signal coordination control of city arterial road that based on graphic method [C]// Harbin, China: Proceedings of 2011 International Conference on Electronic & Mechanical Engineering and Information Technology. 2011: 3562-3566. DOI:10.1109/EMEIT.2011.6023835.
[22] SHOU Yan-fang, ZHANG Dong-bo, XU Jian-ming. Signal control decision model for adjacent intersection based on coordination rate [C]// Guilin, China: 2016 12th World Congress on Intelligent Control and Automation. 2016: 2481-2486. DOI:10.1109/WCICA.2016.7578376.
[23] SUN Zhi-yuan, LU Hua-pu, QU Wen-cong. Tri-level programming model for combined urban traffic signal control and traffic flow guidance [J]. Journal of Central South University, 2016, 23(9): 2443-2452. DOI: 10.1007/ s11771-016-3303-x.
[24] YE Bao-lin, WU Wei-ming, ZHOU Xuan-hao. A green wave band based method for urban arterial signal control [C]// Miami, FL, USA: Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control. 2014: 126-131. DOI:10.1109/ICNSC.2014.6819612.
[25] TANG Tie-qiao, ZHANG Jian, LIU Kai. A speed guidance model accounting for the driver’s bounded rationality at a signalized intersection [J]. Physica A: Statistical Mechanics and its Applications, 2017, 473: 45-52. DOI: https://doi.org/ 10.1016/j.physa.2017.01.025.
[26] DONG Shu-yang, ZHANG Jian, WANG Han. A speed guidance-based signal control method for divisible platoon in CVIS [C]// Tianjin, China:2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER). 2018: 1403-1408. DOI:10.1109/CYBER.2018.8688243.
[27] TANG Tie-qiao, YI Zhi-yan, ZHANG Jian. A speed guidance strategy for multiple signalized intersections based on car-following model [J]. Physica A: Statistical Mechanics and its Applications, 2018, 496: 399-409. DOI: https://doi. org/10.1016/j.physa.2018.01.005.
[28] LIU Bing, ABDELKADER K. V2X-based decentralized cooperative adaptive cruise control in the vicinity of intersections [J]. IEEETransactions on Intelligent Transportation Systems, 2016, 17(3): 644-658. DOI: 10.1109/TITS.2015.2486140.
[29] ZHOU Hong-min, HAWKINS H, ZHANG Yun-long. Arterial signal coordination with uneven double cycling [J]. Transportation Research Part A, 2017, 103: 409-429. DOI: https://doi.org/10.1016/j.tra.2017.07.004.
[30] SHI Meng-kai, ZHANG Yi, YAO Dan-ya. Application- oriented performance comparison of 802.11p and LTE-V in a V2V communication system [J]. Tsinghua Science and Technology, 2019, 24(2): 123-133. DOI: 10.26599/TST. 2018.9010075.
[31] LU Shou-feng. Research on traffic control model based on reinforcement learning theory [M]. Changsha: Central South University Press, 2015: 26-44. (in Chinese)
(Edited by YANG Hua)
中文导读
基于V2X的单向道路信号灯协调控制方法
摘要:单向交通在提高车速和减少交通延误方面具有很大的潜力。由于城市道路网密集,相邻交叉口之间的距离相对较近,使得单点交叉口信号控制效果较差。因此,在单向道路实现多交叉口的信号协调控制具有重要意义。本文提出了一种适用于单向道路的信号协调控制方法。该方法利用车路协同技术,收集交叉口交通信息并将该信息发送到相邻交叉口;协调系统中每个交叉口采用自适应信号控制,根据实时排队车辆数调整交叉口绿灯时间;同时,利用实时交通量计算相邻路口时差和清空时间。利用VISSIM交通仿真软件的仿真结果验证了该方法的有效性。与其他协调控制方法的比较结果显示,本文提出的方法能够有效降低车辆在主干道的行驶延误,提高交通效率。
关键词:交叉口;车路协同;协调控制;仿真评价
Foundation item: Project(61503048) supported by the National Natural Science Foundation of China; Projects(16C0050, 16C0062) supported by Scientific Research Project of Hunan Provincial Department of Education, China
Received date: 2018-11-06; Accepted date: 2019-06-13
Corresponding author: DU Rong-hua, PhD, Professor; Tel: +86-18673128456; E-mail: csdrh@163.com; ORCID: 0000-0003-1081-5572

