»щУЪФӘ°ыЧФ¶Ҝ»ъөДЛ«іөөА»·өәҪ»НЁБчМШРФСРҫҝ
К··еЈ¬ЦЬОДБәЈ¬Бх·Т·јЈ¬өЛБ¬ІЁ
(ЦРДПҙуС§ Ҫ»НЁФЛКд№ӨіМС§ФәЈ¬әюДП іӨЙіЈ¬410075)
ХӘ ТӘЈәХл¶ФТФФӘ°ыЧФ¶Ҝ»ъДЈРНДЈДвөҘіөөА»·өәҪ»НЁРРОӘНЖ¶П¶аіөөА»·өәҪ»НЁБчМШРФөДҫЦПЮРФЈ¬НЁ№э·ЦОцЛ«іөөА»·өәЙПіөБҫФЪЧФУЙБчПВөДЖЪНыРРК»В·ПЯЎўФЪ·ЗЧФУЙБчПВөДЖЪНы»»өАБЩҪзО»ЦГәНј«ПЮО»ЦГЈ¬ГиКцЛ«іөөА»·өәЙПіөБҫөД»»өАҫцІЯЈ¬ҪЁБўЛ«іөөА»·өәөДФӘ°ыЧФ¶Ҝ»ъДЈРНЎЈКэЦөДЈДв·ЦОцҪб№ыұнГчЈә»·өәЧЬСУОуКұјдУл»·өәПЮЛЩЎўіөБҫјЭК»ФұКмБ·іМ¶ИТФј°іөБҫЧуЧӘёЕВКУР№ШЈ¬Н¬КұТІКЬ»·өәЦЬіӨөДУ°ПмЈ»ФЪЖдЛыТтЛШІ»ұдөДЗйҝцПВЈ¬Иф»·өәЦЬіӨФҪРЎЎўіөБҫПЮЛЩФҪҙуЎўіөБҫЧуЧӘёЕВКФҪРЎТФј°јЭК»ФұКмБ·іМ¶ИФҪёЯЈ¬Фт»·өәЧЬСУОуКұјдФҪРЎЎЈ
№ШјьҙКЈә»·өәҪ»НЁБчМШРФЈ»ФӘ°ыЧФ¶Ҝ»ъЈ»Л«іөөА»·өә
ЦРНј·ЦАаәЕЈәU491 ОДПЧұкЦҫВлЈәA ОДХВұаәЕЈә1672-7207(2010)04-1616-07
Two-lane roundabout traffic flow characteristics based on cellular automaton
SHI Feng, ZHOU Wen-liang, LIU Fen-fang, DENG Lian-bo
(School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China)
Abstract: Considering the limitation of traffic characteristics of multi-lane roundabout induced by studying the traffic characteristics of one-lane roundabout using cellular automaton, a cellular automaton model of the two-lane roundabout was constructed, through analyzing the expected drive line of two-lane roundabout under free flow and the expected critical position and limit position of lane changing under non-free flow. The results show that the total delay time is not only affected by the limit velocity of roundabout, driversЎҜ skillful level and left-hand bend probability, but also related to the roundabout size. With other factors fixed, the smaller the roundabout size, the smaller the left-hand bend probability, the higher the driversЎҜ skillful level and the bigger the limit velocity of roundabout, the less the total delay time.
Key words: roundabout traffic flow characteristics; cellular automaton; two-lane roundabout
ФЪіЗКРөАВ·Ҫ»ІжҝЪЙПЈ¬іөБҫРиТӘФЪҙЛНЁ№эәНЧӘПтЈ¬УЙУЪіөБҫјдПа»ҘёЙИЕЈ¬РРіөЛЩ¶ИҪөөНЈ¬ҙУ¶шіцПЦҪ»НЁУөј·ЙхЦБҪ»НЁ¶ВИыПЦПуЎЈҪ»ІжҝЪөД»·өәКЗ20КАјН50ДкҙъФЪУў№ъВКПИ·ўХ№ЖрАҙөДЈ¬НЁ№эФЪҪ»ІжҝЪЦРСлЙиЦГФІРОЦРРДөәЈ¬К№өГҪшИлҪ»ІжҝЪөДІ»Н¬·ҪПтіөБҫ°ҙТ»¶ЁөДЛЩ¶ИИЖЦРРДөәөҘПтРРК»Ј¬ҪшРРәПБчУлҪ»ЦҜЈ¬ҙУ¶шұЈЦӨҪ»ІжҝЪіөБҫҪ»НЁ°ІИ«әНі©НЁЈ¬МбёЯВ·НшХыМеР§ВКЎЈ»·өәҪ»НЁБчМШРФКЗУ°Пм»·өә№ж»®өД№ШјьТтЛШЦ®Т»Ј¬И«Гж·ЦОц»·өәҪ»НЁБчМШРФ¶ФәПАн№ж»®»·өәҫЯУРЦШТӘТвТеЎЈWangөИ[1]АыУГФӘ°ыЧФ¶Ҝ»ъДЈРНСРҫҝБЛіЗКРөҘіөөА»·өәөДҪ»НЁБчМШРФЈ¬өГіцБЛ»·өәБчБҝУлёчІОКэөД№ШПөЎЈFouladvandөИ[2]АыУГЖЪНыЛЩ¶ИР§УҰөДNaSchА©Х№ДЈРНЈ¬ДЈДвБЛөұ»·өәОӘөҘіөөАЗТҪшИліөөАОӘ2ёц·ҪПтКұөДіөБҫСУОуКұјдУлЖҪҫщіөјдҫаөД№ШПөЎЈСҰУфөИ[3-5]ҝјВЗБЛРРіөЧҙМ¬ј°јЭК»Л®ЖҪЈ¬МбіцБЛТ»ЦЦёДҪшөДФӘ°ыЧФ¶Ҝ»ъДЈРНЎЈјшУЪ»·өәіөБчөДёҙФУРФЈ¬ТСУР№ШУЪ»·өәҪ»НЁБчМШРФөДСРҫҝ¶јКЗ»щУЪөҘіөөА»·өәДЈДвЈ¬ІўПЈНыТФҙЛ»сөГ¶аіөөА»·өәөДіөБчМШХчЈ¬өГіцЎ°СУОуКұјдУл»·өәөДЦЬіӨУР№ШЎұ[2]өИҪбВЫЎЈИ»¶шЈ¬°ҙОДПЧ[2]өДЛјВ·ҪшРРјЖЛг»ъДЈДвКұ·ўПЦЈәСУОуКұјдУл»·өәөДЦЬіӨОЮ№ШЎЈ·ЦОцҪб№ыұнГчЈәТтОӘөҘіөөА»·өәІ»ҙжФЪ»»өАЈ¬ЛщТФЈ¬ЧЬСУОуКұјдУл»·өәЦЬіӨјёәхОЮ№ШЈ»¶ш¶аіөөА»·өәҝЙТФ»»өАЈ¬К№өГЧЬСУОуКұјдЛжЧЕ»·өәұдҙу¶шФцҙуЎЈТтҙЛЈ¬Ц»УР¶Ф2ёц»т¶аёціөөАҪшРРСРҫҝЈ¬ІЕДЬ»сөГ·ыәПКөјКөД»·өәҪ»НЁБчМШХчЎЈФЪҙЛЈ¬ұҫОДЧчХЯХл¶ФОЮРЕәЕҝШЦЖөДЛ«іөөА»·өәЈ¬НЁ№э·ЦОцЧФУЙБчПВ»·өәіөБҫөДЖЪНыРРК»В·ПЯЈ¬өјіц·ЗЧФУЙБчПВ»·өәіөБҫ»»өАөДЖЪНыБЩҪзҝХјдО»ЦГәНј«ПЮО»ЦГЈ¬ГиКц·ЗЧФУЙБчПВөД»»өА№жФтЈ¬ІўҪЁБўЛ«іөөА»·өәөДФӘ°ыЧФ¶Ҝ»ъДЈРНЎЈНЁ№эКэЦөДЈДв·ЦОц»·өәЦЬіӨЎўјЭК»ФұКфРФЎў»·өәіөБҫПЮЛЩәНЧуЧӘёЕВК¶Ф»·өәіөБчФЛРРөДУ°ПмЎЈ
1 »·өә·ЦОц
»·өәөДЙијЖҝЙТФИГёчёц·ҪПтөДіөБчСШЧЕН¬Т»ёц(»·РО)·ҪПтФЛРРЈ¬ЗТёшУи»·өәЙПРРК»өДіөБҫ(УлОҙҪшИл»·өәөДіөБҫПаұИ)ТФУЕПИИЁ[6]ЎЈФЪНЁіЈЗйҝцПВЈ¬1ёц»·өәҫЯУР4ёцК»Ил·ҪПтәН4ёцК»іц·ҪПт(ИзНј1ЛщКҫ)Ј¬Ҫ«4ёцК»Ил·ҪПт·ЦұрјЗОӘA, B, C, DЈ»Ҫ«4ёцК»іц·ҪПт·ЦұрјЗОӘAЎд, BЎд, CЎд, DЎдЈ»ФЪГҝМхөАВ·өДИлҝЪұЯҪзҙҰЈ¬іөБҫТФЛж»ъөД·ҪКҪК»ИлЈ¬ІўЗТК»ИліөБҫәНЗ°іөөДҝХјдҫаАлd·юҙУІҙЛЙ·ЦІјЈә (ЖдЦРЈ¬
(ЖдЦРЈ¬ ОӘҝХјдҫаАлЖЪНыЦө)ЎЈёщҫЭіөБҫРРК»В·ПЯҪ«іөБҫ·ЦОӘ4ЦЦАаРНЈәУТЧӘіөБҫЎўЦұРРіөБҫЎўЧуЧӘіөБҫәНUРНЧӘіөБҫЎЈ
ОӘҝХјдҫаАлЖЪНыЦө)ЎЈёщҫЭіөБҫРРК»В·ПЯҪ«іөБҫ·ЦОӘ4ЦЦАаРНЈәУТЧӘіөБҫЎўЦұРРіөБҫЎўЧуЧӘіөБҫәНUРНЧӘіөБҫЎЈ
К»Ил»·өәөДіөБҫ°ҙХХТ»¶ЁөДЧӘПт№жФтФЪ»·ПЯЙПРРК»Т»¶ОКұјдәу·ЦұрТФёЕВКPr, Ps, Pl, PuУТЧӘЎўЦұРРЎўЧуЧӘТФј°UРНЧӘК»Ал»·өәЈ¬ЖдЧӘПтёЕВКВъЧгPr+Ps+Pl+Pu=1ЎЈA, B, C, Dёч·ҪПтЙПРРК»өДіөБҫЧоҙуЛЩ¶ИОӘvmaxЈ¬»·өәЙПРРК»өДіөБҫЧоҙуЛЩ¶ИОӘ Ј¬УЙУЪФЪ»·өәЙПРРК»КұТӘҪшРРЧӘПтЈ¬ЛщТФЈ¬ЖдЧоҙуЛЩ¶ИТӘұИХэіЈіөөАөДөНЈ¬јҙЈјvmaxЎЈ
Ј¬УЙУЪФЪ»·өәЙПРРК»КұТӘҪшРРЧӘПтЈ¬ЛщТФЈ¬ЖдЧоҙуЛЩ¶ИТӘұИХэіЈіөөАөДөНЈ¬јҙЈјvmaxЎЈ
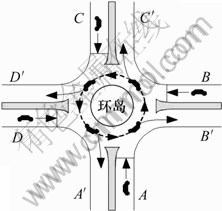
Нј1 »·өәКҫТвНј
Fig.1 Diagram of roundabout
¶ФУЪБҪіөөАөД»·өәЈ¬ДЪІаіөөА№©НЁ№э2ёц»т2ёцТФЙПВ·ҝЪөДіөБчФЛРРЈ»НвІаіөөА№©УТЧӘіөБчНЁРРЎЈФЪіөБҫРРК»№эіМЦРЈ¬З°іөҝЙТФНЁ№эЧӘПтөЖөИ·ҪКҪПтәуіөҙ«ҙпРЕПўЈ¬әуіөПаУҰөШІЙИЎјхЛЩәНөчХыРРК»·ҪПтөИҙлК©Ј¬ҙУ¶шөјЦВСУОу[7-10]ЎЈУЙУЪ»·өәЙПҙжФЪ4ёц·ҪПтөДҪшИліөБҫЈ¬ЗТ¶јҙжФЪ4ёцЧӘПтЈ¬К№өГХыёц»·өәіөБҫРРК»В·ПЯҪ»ЦҜҙОКэФц¶аЈ¬іөБҫПа»ҘёЙИЕёьјУСПЦШЎЈУЙУЪ»·өәЙПНвөАРРК»өДіөБҫ(УлОҙҪшИл»·өәөДіөБҫПаұИ)КјЦХҫЯУРУЕПИИЁЈ¬ТтҙЛЈ¬ёч·ҪПтЙПөДіөБҫҪшИл»·өәКұРиТӘҝјВЗ»·өәНвіөөАЙПТСУРіөБҫөДО»ЦГЈ¬ұШРлУРЧг№»өДҝХјдјдП¶ІЕДЬК»ИлЈ¬јҙөұЗ°·ҪҙжФЪЧг№»өДҝХјдјдП¶КұЈ¬іөБҫ°ҙЖЪНыЛЩ¶ИР§УҰөДNaSchДЈРН[6]ёьРВ№жФтҪшИл»·өәЈ¬·сФтЈ¬јЭК»ФұГЗҫНІЙИЎЦЖ¶ҜЈ¬ҙУ¶шөјЦВЧЬСУОуКұјдФцјУЎЈОӘБЛНіјЖСУОуКұјдЈ¬јЖЛгtКұҝМҫІЦ№іөБҫКэЈ¬јЗОӘQЈ¬Фтt+1КұҝМөДСУОуКұјдT(t+1)[6]ОӘЈә
T(t+1)= T(t)+Q
ЖдЦРЈәT(t)ОӘtКұҝМөДСУОуКұјдЎЈ
2 »»өАРРОӘ·ЦОц
ФЪБчБҝҪПРЎөДЗйҝцПВЈ¬Ҫш»·іөБчәНіц»·іөБчөДіөН·КұҫаҪПҙуЈ¬іөБҫНЁ№э»·өәКұјёәхІ»»бРОіЙіеН»ЎЈЛжЧЕҪш»·іөБчБҝөДФцјУЈ¬Ҫш»·іөБҫәНіц»·іөБҫРОіЙіеН»Кұ¶јЦ»ДЬС°ХТҝЙҙ©ІејдП¶Ј¬Ҫ»МжНЁ№эіеН»өгЎЈИфіеН»іөБчІ»ҙжФЪҝЙІеИлјдП¶Ј¬ФтөҪҙпөДіөБҫФЪіеН»өгЗ°өИҙэЈ¬ЦұөҪіцПЦЛщРијдП¶ІЕНЁ№эіеН»өгЎЈЖдЦРЈ¬Ил»·іөБчЎўіц»·іөБчТФј°УТЧӘіөБчКөјКЙП№ІН¬ХјУГБЛ»·өәөДНвІаіөөАЎЈ
2.1 ЧФУЙБчПВөДЖЪНыРРК»В·ПЯ
ФЪЧФУЙБчПВЈ¬јЭК»ФұІЙУГЧо¶МПЯВ·НЁ№э»·өәЎЈТ»°гАҙЛөЈ¬УТЧӘіөБҫІ»РиТӘ»»өАЈ¬ЦұҪУҙУНвіөөАК»АліцҝЪЈ»¶ФУЪЖдЛы3ЦЦЧӘПт(ЦұРРЎўЧуЧӘәНUРНЧӘ)өДіөБҫЈ¬Чо¶МРРК»В·ПЯИзНј2ЛщКҫЈ¬КЧПИЈ¬ҙУИлҝЪСШДЪіөөАЦРРДПЯөДЗРПЯ¶О(іЖОӘИлЗРПЯ¶О)өҪҙпДЪіөөАЈ¬И»әуЈ¬СШДЪіөөАРРК»Т»¶ОЈ¬ЧоәуЈ¬СШДЪіөөАЦРРДПЯөДЗРПЯ¶О(іЖОӘіцЗРПЯ¶О)өҪҙпіцҝЪЎЈ
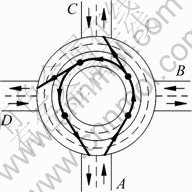
Нј2 ЧФУЙБчПВЖЪНыРРК»В·ПЯКҫТвНј
Fig.2 Diagram of expected drive line under free flow
ХвМхВ·ПЯКЗјЭК»ФұГЗЧоЖЪНыРРК»өДЧо¶МВ·ПЯЈ¬іЖОӘЖЪНыРРК»В·ПЯЎЈ
2.2 ·ЗЧФУЙБчПВөД»»өАРРОӘ
2.2.1 »»өАөДЖЪНыБЩҪзО»ЦГәНј«ПЮО»ЦГ
»·өәНЁіЈҙҰУЪ·ЗЧФУЙБчЧҙМ¬ЎЈјЭК»ФұНЁ№эС°ХТҝЙІеИлјдП¶Аҙ»»өАЈ¬¶ҜМ¬өШөчХыРРК»В·ПЯЎЈИ»¶шЈ¬»·өәЙП»»өАТІІ»КЗФЪИОТвО»ЦГЛжТвҪшРРөДЈ¬І»ВЫКЗПтДЪ»тПтНв»»өАЈ¬¶јУЙПаУҰөДЖЪНыЧоФзәНЖЪНыЧоНн2ёцО»ЦГҪз¶ЁЖд»»өАөДҝХјд·¶О§ЎЈ
ҫЎ№ЬФЪ·ЗЧФУЙБчПВЈ¬јЭК»ФұИФИ»ПЈНыСЎФсЧФУЙБчПВөДЖЪНыРРК»В·ПЯЈ¬ЛщТФЈ¬ЖЪНыЧоФзПтДЪ»тПтНв»»өАО»ЦГ¶јФЪИлЗРПЯЙПЈ¬ЖЪНыЧоНнПтДЪ»тПтНв»»өАО»ЦГ¶јФЪіцЗРПЯЙПЎЈТтҙЛЈ¬ЖЪНыЧоФзПтДЪ»»өАО»ЦГОӘИлЗРПЯ¶ОУлНвөАЦРРДПЯөДҪ»өгЈ»ЖЪНыЧоНнПтДЪ»»өАО»ЦГОӘіцЗРПЯ¶ОөДСУіӨПЯУлНвөАЦРРДПЯөДҪ»өгЈ»ЖЪНыЧоФзПтНв»»өАО»ЦГОӘИлЗРПЯ¶ОУлДЪөАЦРРДПЯөДҪ»өгЈ»ЖЪНыЧоНнПтНв»»өАО»ЦГОӘіцЗРПЯ¶ОУлДЪөАЦРРДПЯөДҪ»өгЎЈ
ИзНј3ЛщКҫЈ¬A·ҪПтҪшИліөБҫөДЖЪНыЧоФзПтДЪ»»өАО»ЦГОӘaЈ¬ЖЪНыЧоФзПтНв»»өАО»ЦГОӘcЈ»D·ҪПтАлҝӘіөБҫөДЖЪНыЧоНнПтДЪ»»өАО»ЦГОӘbЈ¬ЖЪНыЧоНнПтНв»»өАО»ЦГОӘdЎЈ
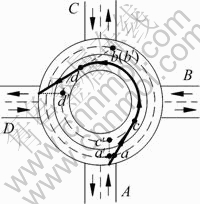
Нј3 ·ЗЧФУЙБчПВ»»өАЖЪНыБЩҪзО»ЦГәНј«ПЮО»ЦГКҫТвНј
Fig.3 Diagram of critical position and limit position under non-free flow
ҙУЖЪНыөДҪЗ¶ИАҙҝҙЈ¬ПтДЪ»»өАҝЙТФФЪЖЪНыЧоФзәНЖЪНыЧоНн2ёцО»ЦГЦ®јдҪшРРЎЈИ»¶шЈ¬өұЖЪНыЧоФзПтДЪ»»өАО»ЦГј°З°·ҪТ»¶ОіөөАұ»ХјУГКұЈ¬іөБҫИФИ»ҝЙДЬФЪЖЪНыЧоФзО»ЦГЦ®З°ПтДЪМбЗ°»»өАЈ¬ө«ХвЦЦМбЗ°»»өАІ»КЗОЮПЮЦЖөДЈ¬»»өАО»ЦГКјЦХІ»»бҝзФҪҪшИл·ҪПтЦұПЯУлНвөАЦРРДПЯөДҪ»өгЈ¬іЖёГҪ»өгОӘЧоФзПтДЪ»»өАөДј«ПЮО»ЦГЎЈФЩҝҙЖЪНыЧоНнПтДЪ»»өАО»ЦГТ»¶ЛЈ¬Из№ыФЪёГҙҰІ»ДЬПтДЪ»»өАЈ¬ҫЎ№ЬҙЛәуіөБҫҝЙДЬЖ«АлНвөАЦұК»ЦБіцҝЪЈ¬ө«ҝЙТФИПОӘёГіөБҫГ»УР»»өА¶шСШНвөАК»ЦБіцҝЪЈ¬ЛщТФЈ¬ЧоНнПтДЪ»»өАөДј«ПЮО»ЦГҫНЦё¶ЁОӘЖЪНыЧоНнПтДЪ»»өАО»ЦГЎЈ
Н¬АнЈ¬ПтНв»»өАҝЙТФФЪЖЪНыЧоФзәНЖЪНыЧоНн2ёцО»ЦГЦ®јдҪшРРЎЈУлЧоФзПтДЪ»»өАөДј«ПЮО»ЦГПа¶ФУҰЈ¬ЧоФзПтНв»»өАөДј«ПЮО»ЦГОӘҪшИл·ҪПтЦұПЯУлДЪөАЦРРДПЯөДҪ»өгЎЈФЩҝҙЖЪНыЧоНнПтНв»»өАО»ЦГТ»¶ЛЈ¬өұЖЪНыЧоНнПтНв»»өАО»ЦГұ»ХјУГКұЈ¬іөБҫИФИ»ҝЙДЬФЪҙЛЦ®әуНЖіЩПтНв»»өАЈ¬ө«ХвЦЦНЖіЩ»»өАІ»КЗОЮПЮЦЖөДЈ¬»»өАО»ЦГКјЦХІ»»бҝзФҪАлҝӘ·ҪПтЦұПЯУлДЪөАЦРРДПЯөДҪ»өгЈ¬іЖёГҪ»өгОӘЧоНнПтНв»»өАөДј«ПЮО»ЦГЎЈ
ИзНј3ЛщКҫЈ¬A·ҪПтҪшИліөБҫөДЧоФзПтДЪ»»өАөДј«ПЮО»ЦГОӘaЎдЈ¬ЧоФзПтНв»»өАөДј«ПЮО»ЦГОӘcЎдЎЈD·ҪПтАлҝӘіөБҫөДЧоНнПтДЪ»»өАөДј«ПЮО»ЦГОӘbЎд(Н¬b)Ј¬ЧоНнПтНв»»өАөДј«ПЮО»ЦГОӘdЎдЎЈ
2.2.2 »»өАҫцІЯ·ЦОц
ФЪ»·өәЙП2ёціөөАЦ®јдөД»»өАРРОӘЈ¬ҙУҫІМ¬ҪЗ¶ИАҙҝҙЈ¬УліөБҫЛщФЪөДО»ЦГУР№ШЈ»ҙУ¶ҜМ¬ҪЗ¶ИАҙҝҙЈ¬УлЖЪНыРРК»В·ПЯј°БЪҪьөАВ·өДХјУГЧҙҝцУР№ШЎЈЛщОҪіөБҫЛщФЪО»ЦГЈ¬ЖдТ»КЗЦёіөБҫФЪДЪөА»№КЗФЪНвөАЈ¬Жд¶юКЗЦёіөБҫУлЖЪНыБЩҪзО»ЦГЎўј«ПЮО»ЦГөДҝХјд№ШПөЎЈЛщОҪЖЪНыРРК»В·ПЯј°БЪҪьөАВ·өДХјУГЧҙҝцЈ¬ЖдТ»КЗЦёЖЪНыРРК»В·ПЯКЗ·сұ»ЖдЛыіөБҫХјУГЈ¬Жд¶юКЗЦёөчХыәуөДРРК»В·ПЯКЗ·сұ»ЖдЛыіөБҫХјУГЎЈ
өұіөБҫФЪНвөАРРК»КұЈ¬ФЪЧоНнПтДЪ»»өАөДј«ПЮО»ЦГЦ®З°Ј¬КјЦХПЈНыПтДЪ»»өАЈ»ФЪҙЛЦ®әуЈ¬І»ФЩПтДЪ»»өАЈ¬СШНвөАРРК»ЦБіцҝЪАлҝӘ»·өәЎЈіөБҫЧЬПЈНыСШЗРПЯ·ҪПтПтДЪ»»өАЈ¬өұЗРПЯ·ҪПтКЬЧиКұЈ¬Т»·ҪГжЈ¬іөБҫҝЙТФСШНвөАјМРшЗ°РРЈ¬өИҙэДЪөАіцПЦ»»өАјдП¶Ј»БнТ»·ҪГжЈ¬Из№ыЗРПЯЙПЧиөІіөБҫҪфәуУР»»өАјдП¶Ј¬ФтҝЙТФІеИлёГјдП¶ЎЈ
өұіөБҫФЪДЪөАРРК»КұЈ¬іөБҫЧЬПЈНыСШЖЪНыРРК»В·ПЯөДіцЗРПЯ·ҪПтАлҝӘ»·өәЈ¬өұіцЗРПЯ·ҪПтКЬЧиКұЈ¬іөБҫұШРлС°ХТРВөДПтНв»»өАО»ЦГЎЈНЁіЈЈ¬іөБҫМбЗ°Т»ёціцҝЪҝӘКјС°ХТЈ¬Из№ыФӨІвіцЗРПЯ·ҪПтКЬЧиЈ¬ұгҙУНвөАЧи°ӯіөБҫҝӘКјНщәуС°ХТ»»өАјдП¶Ј¬іөБҫҝЙТФНЁ№эөчХыіөЛЩөИ·ҪКҪөИҙэјдП¶КөК©»»өАЈ¬ө«іөБҫІ»ДЬ№»і¬№эЧоНнПтНв»»өАөДј«ПЮО»ЦГЎЈ»»өАҫцІЯБчіМНјИзНј4ЛщКҫЎЈ

Нј4 »»өАҫцІЯБчіМНј
Fig.4 Diagram of changing decision-making
3 Л«іөөА»·өәФӘ°ыЧФ¶Ҝ»ъДЈРН
ПВГжёщҫЭЛ«іөөА»·өәҪ»НЁБчМШХчәНФӘ°ыЧФ¶Ҝ»ъАнВЫ[11-14]Ј¬ҪЁБўЛ«іөөА»·өәФӘ°ыЧФ¶Ҝ»ъДЈРНЎЈЖдЦРЈ¬КұјдЎўҝХјдТФј°ЛЩ¶И¶јұ»ХыКэАлЙў»ҜЈ¬»·өәДЪНвіөөАұ»»®·ЦОӘАлЙўөДёсЧУ(јҙФӘ°ы)ЎЈУЙУЪ»·өәІ»ПсЦұөАТ»СщЛщУРФӘ°ыҙҰФЪН¬Т»ЦұПЯЙПЈ¬ТтҙЛЈ¬»®·ЦФӘ°ыөД·ҪКҪҪПЦұөАУРЛщІ»Н¬ЎЈ»·өәФӘ°ыУЙУліөөАЦРРДПЯіӨ¶ИПаөИөДФІ»·№№іЙЎЈПФИ»Ј¬НвіөөАФӘ°ыКэҙуУЪДЪіөөАФӘ°ыКэЎЈГҝёцФӘ°ы»тХЯОӘҝХЈ¬»тХЯұ»іөБҫХјҫЭЈ¬1БҫіөХј2ёцФӘ°ыЈ¬ҪшИл·ҪПтіөөАЙПөДіөЛЩҝЙТФИЎ0, 1, 2, Ўӯ, vmaxЦРИОТвЦөЈ¬»·өәЙПіөЛЩҝЙТФИЎ0, 1, 2, Ўӯ, ЦРИОТвЦөЎЈФЪtКұҝМЈ¬·ЦұрјЗx(t), v(t)әНd(t)ОӘөұЗ°іөБҫөДО»ЦГЎўЛЩ¶ИәНУлЗ°іөөДҝХјдҫаАлЈ¬xl(t), v1(t)әНd1(t)ОӘ З°іөөДО»ЦГЎўЛЩ¶ИәНУлПаУҰЗ°іөөДҝХјдҫаАлЎЈјЗ°ІИ«ҫаАл (ЖдЦРЈ¬
(ЖдЦРЈ¬
 Ј¬dsОӘЧоРЎ°ІИ«ҫаАл)Ј¬јЗ»·өәПөНіјхЛЩёЕВКОӘpnЈ¬јЭК»ФұЛ®ЖҪОӘFЈ¬ФтёчіөБҫјхЛЩёЕВКОӘЈә
Ј¬dsОӘЧоРЎ°ІИ«ҫаАл)Ј¬јЗ»·өәПөНіјхЛЩёЕВКОӘpnЈ¬јЭК»ФұЛ®ЖҪОӘFЈ¬ФтёчіөБҫјхЛЩёЕВКОӘЈә ЎЈФЪ
ЎЈФЪ өД№эіМЦРЈ¬ДЈРН°ҙИзПВ№жФтҪшРРСЭ»ҜЎЈ
өД№эіМЦРЈ¬ДЈРН°ҙИзПВ№жФтҪшРРСЭ»ҜЎЈ
(1) РРҪш№жФт(ёьРВіөБҫөДРРК»ЛЩ¶ИәНО»ЦГ)Јә
ўЩ ёьРВіөБҫЛЩ¶И(ёщҫЭіөБҫөұЗ°ЛЩ¶ИУлЗ°·ҪҝХФӘ°ыКэАҙөчХыЛЩ¶И)ЎЈ
өЪ1ІҪ јУЛЩЎЈ Ўы
Ўы (јҙіөБҫЖЪНыТФЧоҙуЛЩ¶ИРРК»)ЎЈ
(јҙіөБҫЖЪНыТФЧоҙуЛЩ¶ИРРК»)ЎЈ
өЪ2ІҪ јхЛЩЎЈv(t+2/3)Ўыmin{D(t+1/3), v(t+1/3)} (ұЬГвУлЗ°іө·ўЙъЕцЧІ¶шјхЛЩ)ЎЈ
өЪ3ІҪ Лж»ъјхЛЩЎЈТФёЕВКpn, v(t+1)Ўы max{v(t+2/3) -1, 0} (УЙёчЦЦІ»И·¶ЁТтЛШФміЙөДіөБҫјхЛЩ)ЎЈ
ўЪ ёьРВіөБҫО»ЦГЎЈПтЗ°РРҪшЎЈx(t+1)Ўыx(t)+v(t+1) (іөБҫ°ҙХХөчХыәуөДЛЩ¶ИПтЗ°РРК»)ЎЈ
(2) »»өА№жФтЈә
ўЩ УЙНвПтДЪ»»өА№жФтЎЈ¶ФУЪtКұҝМНвөАіөБҫiЈ¬ҝјВЗТФПВ3ЦЦЗйРОЈә
i) ИфЖдО»ЦГxi(t)РЎУЪЧоНнПтДЪ»»өАј«ПЮО»ЦГЈ¬ФтЧӘПВТ»ІҪЈ¬·сФтІ»»»өАЎЈ
ii) ёщҫЭЖдЗРПЯЙПДЪөАФӘ°ыО»ЦГhөДХјҫЭЧҙМ¬flag(h) (flag(h)=1Ј¬ұнКҫХјҫЭЈ»flag(h)=0Ј¬ұнКҫОҙХјҫЭ)И·¶ЁПтДЪ»»өАҫцІЯЈ¬јҙөұflag(h)=0КұЈ¬іөБҫПтДЪ»»өАЈ¬·сФтЧӘПВТ»ІҪЎЈ
iii) ёщҫЭФӘ°ыО»ЦГhөДҪфәуО»ЦГХјҫЭЧҙМ¬flag(h-1)И·¶ЁПтДЪ»»өАҫцІЯЈ¬јҙөұflag(h-1)=0КұЈ¬іөБҫПтДЪ»»өАЈ¬·сФтІ»»»өАЎЈ
ўЪ УЙДЪПтНв»»өА№жФтЎЈ¶ФУЪtКұҝМДЪөАіөБҫiЈ¬ҝјВЗТФПВ2ЦЦЗйРОЈә
i) МбЗ°ФӨІвЗРПЯПтНв»»өАКЬЧиЗйҝцH(Из№ыНвөАПаУҰЗ°·ҪҝХП¶РЎУЪөұЗ°іөБҫЛЩ¶Иvi(t)Ј¬ФтH=1Ј¬ұнКҫКЬЧиЈ»Из№ыНвөАПаУҰЗ°·ҪҝХП¶ҙуУЪөұЗ°іөБҫЛЩ¶ИЦөvi(t)Ј¬ФтH=0Ј¬ұнКҫОҙКЬЧи)И·¶ЁКЗ·сСШіцЗРПЯПтНв»»өАЈ¬јҙөұH=1Ј¬ЧӘПВТ»ІҪЈ¬·сФтСШіцЗРПЯПтНв»»өАЎЈ
ii) ёщҫЭЖдіцЗРПЯНвөАО»ЦГkәуҝХП¶УлөұЗ°іөБҫөДЗ°әу№ШПөR(R=1Ј¬ұнКҫҝХП¶ФЪіөБҫЗ°·ҪЈ»R=0Ј¬ұнКҫҝХП¶ФЪіөБҫәу·Ҫ)И·¶ЁПтНв»»өАҫцІЯЈ¬јҙөұR=1КұЈ¬іөБҫ°ҙФӯЛЩёьРВПтЗ°РРҪшЈ¬өИҙэјдП¶ПтНв»»өАЈ»өұR=0КұЈ¬іөБҫјхЛЩёьРВЗ°РРЈ¬өИҙэјдП¶ПтНв»»өАЎЈ
4 јЖЛг»ъДЈДвј°Ҫб№ы·ЦОц
4.1 ДЈДвМхјю
ДЈДвІЙИЎҝӘ·ЕРФұЯҪзМхјюЈ¬ИЎөҘО»КұјдІҪіӨОӘ 2 sЈ¬ЧЬКұјдОӘ1 800ёцКұјдІҪЈ¬јҙОӘКөјКөД1 hЎЈіхКјЖҪҫщіөјдҫаОӘ1ёцФӘ°ыЈ¬ГҝҙОСӯ»·ЖҪҫщіөјдҫаөЭФц 1ёцФӘ°ыЈ¬ЧЬДЈДвҙОКэОӘ30ҙОЎЈНЁ№эёДұдЖҪҫщіөјдҫаҝЙТФҝҙіц»·өәЧЬСУОуКұјдөДұд»ҜЎЈГҝёцФӘ°ы¶ФУҰУЪКөјКЦРөД2.8 mЈ¬өАВ·іөөАөДіӨ¶ИОӘL=70ёцФӘ°ыЎЈіөөАәН»·өәіөБҫ·ЦұрТФіхКјЛЩ¶И(0, 1, Ўӯ, vmax)әН(0, 1, Ўӯ, )Лж»ъөШ·ЦІјФЪТ»О¬АлЙўөДёсөгЙПЈ¬ИЎvmax=12ФӘ°ы/КұјдІҪЈ¬јҙОӘКөјК60 km/hЈ¬ЧоРЎ°ІИ«ҫаАлds=1ёцФӘ°ыЎЈФЪДЈДвДіТ»ІОКэ¶ФСУОуКұјдөДУ°ПмКұЈ¬ЖдЛыІОКэІ»ұдЎЈ»·өәіӨ¶ИЎўјхЛЩёЕВКЎў»·өәПЮЛЩәНЧӘПтёЕВК·ЦұрИЎLr=48ёцФӘ°ыЈ¬Pn=0.1Ј¬=8ФӘ°ы/КұјдІҪЈ¬Pr=Ps=Pl= Pu=0.25ЎЈ
4.2 Ҫб№ы·ЦОц
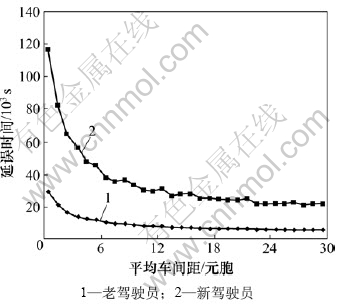
НЁ№эЛ«іөөА»·өәҪ»НЁБчөДКэЦөДЈДвЈ¬өГөҪІ»Н¬ІОБҝПВ»·өәЧЬСУОуКұјдУлЖҪҫщіөјдҫаөД№ШПөЈ¬ИзНј5~8ЛщКҫЎЈҝЙјыЈәЛжЧЕЖҪҫщіөјдҫаҰЛөДФцҙуЈ¬ЧЬСУОуКұјдСёЛЩјхЙЩЈ»ө«өұҰЛҙуУЪ13ёцФӘ°ыКұЈ¬ЧЬСУОуКұјдІоТмІ»ҙуЎЈХвКЗУЙУЪЖҪҫщіөјдҫаҪПҙуКұЈ¬іөБчБҝҫНПаУҰҪПЙЩЈ¬Тт¶шСУОуКұјдҪПРЎЈ»¶шөұіөјдҫаҪПРЎКұЈ¬¶ФУҰіөБчБҝәЬҙуЈ¬ЧЬСУОуКұјдПФЦшФцјУЎЈУЙҙЛҝЙЦӘЈәФЪҪ»НЁБчБҝІ»КЗәЬҙуКұЈ¬»·өәЖрөҪБЛәЬәГөДҝШЦЖЧчУГЈ¬ХвУлҪ»НЁ№ж»®КұЙиЦГ»·өәөДМхјюКЗПаОЗәПөДЎЈ»·өәЦЬіӨІ»Н¬КұЖҪҫщіөјдҫаУлЧЬСУОуКұјдөД№ШПөИзНј5ЛщКҫЎЈЖдЦРЈ¬ПөНіјхЛЩёЕВКPn=0.1Ј¬»·өәЧоҙуЛЩ¶И=8ФӘ °ы/КұјдІҪЈ¬ЧӘПтёЕВКPr=Ps=Pl=Pu=0.25ЎЈТ»°гЦРРДөәЧоРЎ°лҫ¶ОӘ20 mЈ¬ЦЬіӨОӘ125.6 mЎЈҝјВЗөҪіЗКРУГөШөИ·ҪГжөД№ж»®ПЮЦЖЈ¬Т»°г»·өә°лҫ¶І»і¬№э30 mЈ¬ЦЬіӨІ»і¬№э188.4 mЈ¬ЛщТФЈ¬ФЪДЈДвЦРЈ¬»·өәДЪіөөАіӨ¶ИLr·ЦұрИЎ48Ј¬56әН64ёцФӘ°ыЈ¬ПаөұУЪ134.4Ј¬156.8әН179.2 mЎЈДЈДвҪб№ыПФКҫЈә»·өәЦЬіӨҪПРЎКұСУОуКұјдҪП¶МЈ»·ҙЦ®Ј¬СУОуКұјдҪПіӨЎЈХвКЗТтОӘіөБҫФЪЦЬіӨҪПіӨөДЛ«іөөА»·өәДЪЈ¬ЖдРРК»ҫаАлҪПіӨЈ¬К№өГЖд»»өАРРОӘЛжЦ®ФцјУЈ¬ҪПҙуіМ¶ИөШУ°ПмПаБЪіөБҫРРК»Ј¬Ҫш¶шөјЦВСУОуКұјдЛжЦ®ФцјУЎЈ
І»Н¬јЭК»Л®ЖҪПВЖҪҫщіөјдҫаУлЧЬСУОуКұјдөД№ШПөИзНј6ЛщКҫЎЈЖдЦРЈ¬»·өәДЪөАіӨ¶ИLr=48ёцФӘ°ыЈ¬»·өәЧоҙуЛЩ¶И=8ФӘ°ы/КұјдІҪЈ¬ЧӘПтёЕВКPr=Ps=Pl= Pu=0.25ЎЈДЈДвЦРИЎПөНіөДјхЛЩёЕВКОӘ0.1Ј¬РВЛҫ»ъөДјЭК»Л®ЖҪФ¶І»ИзАПЛҫ»ъөДјЭК»Л®ЖҪЈ¬ТтҙЛЈ¬ИЎАПЛҫ»ъ
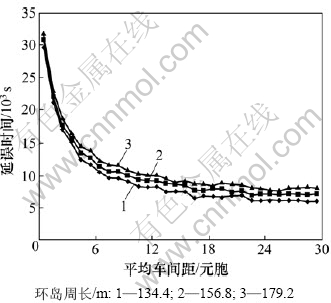
Нј5 »·өәЦЬіӨІ»Н¬КұөДЧЬСУіЩКұјдЛжЖҪҫщіөјдҫаөДұд»Ҝ№ШПө
Fig.5 Relationship between total delay time and average space gap at different roundabout size
Нј6 І»Н¬јЭК»Л®ЖҪПВөДЧЬСУіЩКұјдЛжЖҪҫщіөјдҫаөДұд»Ҝ№ШПө
Fig.6 Relationship between total delay time and average space gap at different driversЎҜ skillful levels
өДјЭК»Л®ЖҪF=1Ј¬РВЛҫ»ъөДјЭК»Л®ЖҪF=4ЎЈУЙНј6ҝЙјыЈәІ»Н¬јЭК»Л®ЖҪөДЛҫ»ъ¶ФЧЬСУОуКұјдөД№ұПЧТІІ»Н¬ЎЈРВЛҫ»ъұИАэФҪҙуЈ¬іөБчРРҪшФҪІ»Бчі©ЎЈХвКЗТтОӘЖө·ұөШ»»өА¶ФјЭК»Л®ЖҪөДТӘЗуҪПёЯЈ¬ИфРВјЭК»ФұҪП¶аЈ¬ФтіөБҫ»»өАКұөДПа»ҘёЙИЕФҪГчПФЈ¬»бёшХыёц»·өәҙшАҙҪПҙуөДСУОуЎЈ
І»Н¬ПЮЛЩПВЖҪҫщіөјдҫаУлЧЬСУОуКұјдөД№ШПөИзНј7ЛщКҫЎЈЖдЦР»·өәДЪөАіӨ¶ИLr=48ёцФӘ°ыЈ¬ПөНіјхЛЩёЕВКPn=0.1Ј¬ЧӘПтёЕВКPr=Ps=Pl=Pu=0.25ЎЈУЙНј7ҝЙјыЈә»·өәіөБҫөДПЮЛЩ¶ФСУОуКұјдУРҪПҙуУ°ПмЈ¬іөБҫПЮЛЩФҪРЎЈ¬СУОуКұјдФҪіӨЎЈ
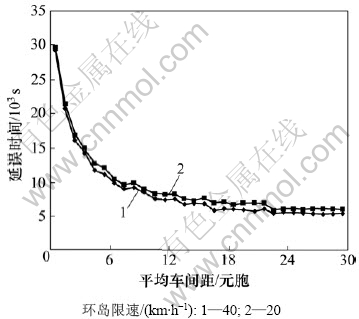
Нј7 І»Н¬ПЮЛЩМхјюПВЧЬСУіЩКұјдЛжЖҪҫщіөјдҫаөДұд»Ҝ№ШПө
Fig.7 Relationship between total delay time and average space gap at different limit velocities of roundabout
І»Н¬ЧӘПтёЕВКПВЖҪҫщіөјдҫаУлЧЬСУОуКұјдөД№ШПөИзНј8ЛщКҫЎЈЖдЦРЈә»·өәДЪөАіӨ¶ИLr=48ёцФӘ°ыЈ¬ПөНіјхЛЩёЕВКPn=0.1Ј¬»·өәЧоҙуЛЩ¶И=8ФӘ°ы/КұјдІҪЎЈУЙНј8ҝЙјыЈәөұЧуЧӘіөБҫҪП¶аКұЈ¬»·өәЙПёчіөөАөДЧЬСУОуКұјдҪП¶аЎЈХвКЗТтОӘЧуЧӘіөБҫФЪ»·өәРРК»өДҫаАлЧоіӨЈ¬ЖдРРК»№эіМЦРөД»»өАРРОӘҪП¶аЈ¬ҙУ¶шөјЦВЧЬСУОуКұјдПаУҰФцјУЎЈФЪКөјК»·өәҪ»НЁБчФЛРРЦРЈ¬ЛжЧЕЧуЧӘіөБҫөДФц¶аЈ¬»·өәөДФЛРРТӘ»әВэР©ЎЈ
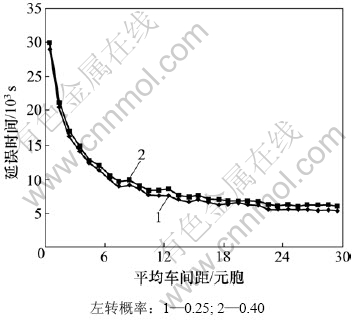
Нј8 І»Н¬ЧӘПтёЕВКПВЧЬСУіЩКұјдЛжЖҪҫщіөјдҫаөДұд»Ҝ№ШПө
Fig.8 Relationship between total delay time and average space gap at different left-hand bend probabilities
ФЪПөНіјхЛЩёЕВКPn=0.1Ј¬ЧӘПтёЕВКPr=Ps=Pl= Pu=0.25Ј¬»·өәПЮЛЩ=40 km/hЈ¬АПЛҫ»ъөДјЭК»Л®ЖҪF=1Ј¬РВЛҫ»ъөДјЭК»Л®ЖҪF=4МхјюПВЈ¬І»Н¬»·өәЦЬіӨТФј°ЖҪҫщіөјдҫаПВ»·өәНЁРРДЬБҰИзұн1ЛщКҫЎЈУЙұн1ҝЙјыЈәФЪЖҪҫщіөБҫјдҫаПаН¬МхјюПВЈ¬»·өәЦЬіӨФҪҙуЈ¬ЖдНЁРРДЬБҰФҪҙ󣻶шФЪ»·өәЦЬіӨПаН¬КұЈ¬І»Н¬іөБҫјдҫаПВөД»·өәНЁРРДЬБҰПаІоІ»ҙуЈ¬ЦчТӘКЗТтОӘөұЖҪҫщіөБҫјдҫаҪПҙуКұЈ¬»·өәЙПіөБҫөДЖҪҫщРРК»ЛЩ¶ИФҪҪПҙуЈ¬өұЖҪҫщіөБҫјдҫаҪПРЎКұЈ¬»·өәЙПіөБҫөДЖҪҫщРРК»ЛЩ¶ИПаУҰҪөөНЈ¬ҙУ¶шК№өГёчЦЦЗйРОПВөД»·өәНЁРРДЬБҰұд»ҜІ»ҙуЎЈ
ұн1 І»Н¬МхјюПВ»·өәНЁРРЛЩ¶ИәНДЬБҰ
Table 1 Speed and capacity of roundabout in different conditions

5 ҪбВЫ
(1) НЁ№э·ЦОцЛ«іөөА»·өәЙПіөБҫФЪЧФУЙБчПВөДЖЪНыРРК»В·ПЯТФј°ФЪ·ЗЧФУЙБчПВөДЖЪНы»»өАБЩҪзО»ЦГәНј«ПЮО»ЦГЈ¬ГиКцЛ«іөөА»·өәЙПіөБҫөД»»өАҫцІЯЈ¬И·¶ЁЛ«іөөА»·өәЙПіөБҫөДРРҪш№жФтәН»»өА№жФтЈ¬Ҫш¶шёщҫЭЛ«іөөА»·өәҪ»НЁБчМШХчәНФӘ°ыЧФ¶Ҝ»ъАнВЫЈ¬ҪЁБўЛ«іөөА»·өәФӘ°ыЧФ¶Ҝ»ъДЈРНЎЈ
(2) »·өәөДЦЬіӨәНЧуЧӘёЕВКФҪРЎЈ¬ЧЬСУОуКұјдФҪРЎЈ»јЭК»ФұКмБ·іМ¶ИФҪёЯЈ¬ЧЬСУОуКұјдФҪРЎЈ»»·өәПЮЛЩФҪҙуЈ¬ЧЬСУОуКұјдФҪРЎЎЈЦӨКөБЛ»·өәЧЬСУОуКұјдІ»ҪцУл»·өәПЮЛЩЎўіөБҫјЭК»ФұКмБ·іМ¶ИТФј°іөБҫЧуЧӘёЕВКУР№ШЈ¬Н¬КұТІУл»·өәЦЬіӨУР№ШЎЈ
ІОҝјОДПЧЈә
[1] Wang R, Ruskin H J. Modeling traffic flow at a single-lane urban roundabout[J]. Comput Phys Commun, 2002, 147(2): 570-576.
[2] Fouladvand E M, Zeinab S, Shaebani R M. Characteristics of vehicular traffic flow at a roundabout[J]. Phys Rev E70, 2004, 47(2): 550-556.
[3] СҰУф, ¶ӯБҰФЕ, ҙчКАЗҝ. Т»ЦЦёДҪшөДТ»О¬ФӘ°ыЧФ¶Ҝ»ъҪ»НЁБчДЈРНј°јхЛЩёЕВКөДУ°Пм[J]. ОпАнС§ұЁ, 2001, 50(3): 445-449.
XUE Yu, DONG Li-yun, DAI Shi-qiang. An improved one-dimensional cellular automaton model of traffic flow and the effect of deceleration probability[J]. Acta Physica Sinica, 2001, 50(3): 445-449.
[4] »ЁО°, БЦ°ШБә. ҝјВЗРРіөЧҙМ¬өДТ»О¬ФӘ°ыЧФ¶Ҝ»ъҪ»НЁБчДЈРН[J]. ОпАнС§ұЁ, 2005, 54(6): 2595-2599.
HUA Wei, LIN Bo-liang. One-dimensional traffic cellular automaton model with considering the vehicle moving status[J]. Acta Physica Sinica, 2005, 54(6): 2595-2599.
[5] »ЁО°, РнБј. ҝјВЗјЭК»Л®ЖҪөДФӘ°ыЧФ¶Ҝ»ъҪ»НЁБчДЈРН[J]. Ҫ»НЁФЛКдПөНі№ӨіМУлРЕПў, 2007, 7(4): 111-114.
HUA Wei, XU Liang. A new cellular automaton model with considering of driving ability[J]. Journal of Transportation Systems Engineering and Information Technology, 2007, 7(4): 111-114.
[6] јЦұу, ёЯЧФУС, АоҝЛЖҪ, өИ. »щУЪФӘ°ыЧФ¶Ҝ»ъөДҪ»НЁПөНіҪЁДЈУлДЈДв[M]. ұұҫ©: ҝЖС§іц°жЙз, 2007: 97-113.
JIA Bin, GAO Zi-you, LI Ke-ping, et al. Models and simulations of traffic system based on the theory of cellular automation[M]. Beijing: Science Press, 2007: 97-113.
[7] HUANG Ding-wei. Phase diagram of a traffic roundabout[J]. Physica A: Statistical Mechanics and its Applications, 2007, 383(2): 603-612.
[8] іВРЎәи, Т¶ЕнТҰ. Ҫ»ІжҝЪЧуЧӘіөБчұИАэ¶ФВ·НшФЛРРР§ВКөДУ°Пм[J]. Н¬јГҙуѧѧұЁ: ЧФИ»ҝЖС§°ж, 2008, 36(8): 1067-1072.
CHEN Xiao-hong, YE Peng-yao. Impact of proportion of left turn flow at signalized intersections on urban road network efficiency[J]. Journal of Tongji University: Natural Science, 2008, 36(8): 1067-1072.
[9] НхХрФ¶. іЗКРөАВ·»·РОҪ»ІжҝЪіөБҫЕЕ¶Уј°РРіөСУОуСРҫҝ[J]. ұұҫ©ҪЁЦю№ӨіМС§ФәС§ұЁ, 2004, 20(3): 54-57.
WANG Zhen-yuan. Research on microcosmic simulation of traffic in city road[J]. Journal of Beijing Institute of Civil Engineering and Architecture, 2004, 20(3): 54-57.
[10] НхСпХс. өАВ·ЖҪГжҪ»ІжҝЪЦР»·РОҪ»ІжҝЪЙијЖ[J]. УРЙ«ТұҪрЙијЖУлСРҫҝ, 2006, 27(2): 36-39.
WANG Yang-zhen. Design of roundabout at road intersection[J]. Nonferrous Metals Engineering and Research, 2006, 27(2): 36-39.
[11] ДЬДю, »ЖШ№иӨ, АБў. »щУЪФӘ°ыЧФ¶Ҝ»ъөДОў№ЫіЗКРөАВ·»мәПҪ»НЁ·ВХж[J]. ПөНі·ВХжС§ұЁ, 2005, 17(5): 1234-1236.
NENG Ning, HUANG Yu-yu, LI Gong-li. Microscopic simulation of urban mixed traffic flow based on cellular automata[J]. Acta Simulata Systematica Sinica, 2005, 17(5): 1234-1236.
[12] БхДҪИК, СҰУф, ҝЧБоҪӯ. іЗКРөАВ·Ҫ»НЁОКМвУлҪ»НЁБчДЈРН[J]. БҰС§УлКөјщ, 2005, 27(1): 1-6.
LIU Mu-ren, XUE Yu, KONG Ling-jiang. Urban highway traffic and traffic flow models[J]. Mechanics and Engineering, 2005, 27(1): 1-6.
[13] №®РЎІЁ, АоЦҫЕф, БхФКІЕ. »щУЪФӘ°ыЧФ¶Ҝ»ъөДіЗКРөАВ··ВХжПөНі[J]. ITSНЁС¶, 2005, 7(3): 26-30.
GONG Xiao-bo, LI Zhi-peng, LIU Yun-cai. Cellular automaton based simulation for city traffic[J]. Intelligent Transportation System, 2005, 7(3): 26-30.
[14] цДЦТГс. өАВ·Ҫ»НЁЧйЦҜУЕ»Ҝ[M]. ұұҫ©: ИЛГсҪ»НЁіц°жЙз, 2004: 56-67.
QU Zhong-min. Road traffic organization optimization[M]. Beijing: China Communications Press, 2004: 56-67.
КХёеИХЖЪЈә2009-068-16Ј»РЮ»ШИХЖЪЈә2009-10-15
»щҪрПоДҝЈә№ъјТ»щҙЎСРҫҝјЖ»®ПоДҝ(2006CB705500)Ј»ҪМУэІҝІ©Кҝөг»щҪрЧКЦъПоДҝ(20060533036)
НЁРЕЧчХЯЈәК··е(1956-)Ј¬ДРЈ¬әюДПЬЖҪӯИЛЈ¬ҪМКЪЈ¬І©КҝСРҫҝЙъөјКҰЈ¬ҙУКВҪ»НЁПөНіУЕ»ҜөИСРҫҝЈ»өз»°Јә0731-82655126Ј»E-mail: shifeng@mail.csu.edu.cn
(ұајӯ ХФҝЎ)

