�����ʻԱ���Ի�����Ķ�̬·���յ�����
����1������1, 2���Ž���1������1
(1. ���ϳ���ѧԺ ��ľ����ѧԺ������ ������413000��
2. ��ɳ������ѧ ��ͨ���乤��ѧԺ������ ��ɳ��410004)
ժҪ�����������滮��˼�룬�о������ʻԱ���Ի�����Ķ�̬·���յ����������ȣ��������Ի���̬·���յ����⣬����·�ν�ͨ�迹�ĸ��Ի�����ָ����ϵ��Ȼ���������滮˼�룬���и��Ի���̬·���յ��������ʻԱ�Ե�·�ġ������ԡ�����̬ȷ����ͨ·�������ļ��οռ䣻�����ʻԱ�Ե�·�ġ�ƫ���ԡ����Լ��οռ��ڵĽ�ͨ·���迹���и��Ի����ۣ������ʻԱ�Ե�·�ġ������ԡ�������Dijkstra�㷨�ڶ�̬��ͨ·���н�������·����������·���еĽ�ͨ�迹�����仯ʱ����ʱ����·����Ϣ�����������ӳ�����ǰλ�õ�Ŀ�ĵص�����·�����о�����������÷����������ּ�ʻԱ�ĸ��Ի�������������֤�˸÷�������Ч�ԺͿ����ԡ�
�ؼ��ʣ���ͨ���̣���̬·���յ��������滮�����Ի�����ʻƫ�ã�Dijkstra�㷨
��ͼ����ţ�U491.4 ���ױ�־�룺A ���±�ţ�1672-7207(2013)05-2124-06
Dynamic route guidance method facing driver��s individual demand
LONG Qiong1, ZENG Ge1, 2, ZHANG Jinfan1, ZHANG Lei1
(1. School of Civil Engineering, Hunan City University, Yiyang 413000, China;
2. School of Traffical and Transportation Engineering, Changsha University of Science & Technology, Changsha 410004, China)
Abstract: A dynamic route guidance method facing the driver��s individual demand was advanced based on physical programming theory. Firstly, the personalized dynamic route guidance problem was analyzed and the individualized evaluation index system of road traffic impedance was constructed. Then, based on physical programming theory, the method of individual dynamic route guidance was studied as follows: Aiming at the driver��s feasibility demand on the road, the dynamic traffic road network geometry space for searching was determined. Aiming at the driver��s preference demand on the road, the evaluation of the traffic network impedance in the geometry space was individualized. Aiming at the driver��s optimality demand on the road, the optimal path was searched on Dijkstra algorithm in dynamic transportation network. When the traffic network impedance changed, the new optimal path from the current position of the vehicle to the destination would be re-searched by updating network information. The results show that the method can fully reflect the driver��s personal demands. Simulation examples validate the feasibility and effectiveness of the method.
Key words: traffic engineering; dynamic route guidance; physical programming; individual demand; driving preference; Dijkstra algorithm
��̬·���յ��о��ĺ��������ǣ��ڶ�̬�Ľ�ͨ·���У��ҳ�1�����Ǽ�ʻԱ·��ѡ����Ϊ�����ŵ�·���Ӷ�ʹ�ü�ʻԱ˳���ش���㵽���յ�[1-4]���ڴ�ͳ��·���յ������о��У�һ���Գ���ʱ����̻���о��������Ϊ�Ż�Ŀ�ꡣ���ַ�����Ȼ����������·������������Ѷȣ����ǣ����ں����˼�ʻԱ�ĸ��Ի������յ�ϵͳ��ͬ��ʻԱ�ṩ������·����һ���ģ��⽫��������ߵĹ��ȷ�Ӧ��ЧӦ���Ӷ�����ӵ��Ư������ӵ��Ư������IJ�����ʹ��·���еĽ�ͨ������ʧ��״̬��ͬʱ����������Ӽ�ʻԱ�Խ�ͨ�յ�ϵͳ�IJ����ζȣ��Ӷ��Խ�ͨ���յ�������Ӧ�����ƹ�����ϴ�ĸ���Ӱ�졣���ڴˣ�һЩѧ���������k-���·�㷨��ͬʱ��ȡ������ѡ·������ʻԱѡ�����ľ���Ȩ������ʻԱ[5-8]�����ַ�������Ч��ɢ��ͨ��������ӵ��Ư�����⣬��ͬʱ��������Ҫ��ʻԱ�Ը���·���Ľ��и��Ի����۵����⡣�����[9-12]���û�ɫ���ۡ�ģ����ѧ��������ȷ���̽���˸����⡣����ͨ������£���Щ·��������·�������������·���������ڴ�ͳ�ľ�̬��ͨ·��������ɣ�����·�����۹�������Ҫ�ܹ���ӳ��ʻԱ���Ի�����Ľ�ͨ��Ϣ�����߶Խ�ͨ·������Ϣ����IJ�һ���ԣ���ʵ��Ӧ�ô�����һ�����Ѷȡ���ʻԱ����·��ѡ�����Ϊ�����ϸ��ӣ���ͬ��ʻԱѡ������·���ı����ǹ̶�����ġ�Ϊ�ˣ����������ڷ������Ի���̬·���յ�����Ļ����ϣ����һ�������ʻԱ���Ի�����Ķ�̬·���յ����������ȣ�����·�ν�ͨ�迹����ָ����ϵ�����������滮��˼�룬��̬ȷ����Ӧ��·�������ռ䣻��Σ������ʻԱƫ�����ӣ��������ռ��·�ν���ʵʱ�ۺ����ۣ��õ���ӳ��ʻԱ���Ի�����ĸ�·���ۺϽ�ͨ�迹����������Dijkstra�㷨ʵ������·������, �ɴ˻�õ�����·���ȿ����˸�����Ӱ������, �ֳ�������˲�ͬ��ʻԱ�ij�����Ը��
1 ���Ի���̬·���յ�����
����ͨ·������Ϊ �����У�VΪ·�����нڵ�vi�ļ��ϣ�AΪ����·��Ai,j�ļ��ϣ��±�i��jΪ·���ڵ��ʶ��
�����У�VΪ·�����нڵ�vi�ļ��ϣ�AΪ����·��Ai,j�ļ��ϣ��±�i��jΪ·���ڵ��ʶ�� Ϊ·��仯�ɻ�֪��Ԥ���ʱ��Ρ���·��Ai,j���迹Ϊ
Ϊ·��仯�ɻ�֪��Ԥ���ʱ��Ρ���·��Ai,j���迹Ϊ ����ʾ�ӽڵ�vi�������ڵ�vj�Ľ�ͨ�迹������
����ʾ�ӽڵ�vi�������ڵ�vj�Ľ�ͨ�迹������ ��Ϊ��ͨ�迹����ָ�꣬����Ի���̬·���յ������������Ϊ�������ܹ�ȫ�淴ӳ·������������ָ����ϵX�������ʻԱ�ĸ��Ի�ƫ�����ӣ������ܹ���ӳ��ʻԱ���Ի������Ľ�ͨ·����������Ѱ��1����t0ʱ�̳���������ʼ��v0��Ŀ���vN�����ܹ������ʻԱ���Ի������·��
��Ϊ��ͨ�迹����ָ�꣬����Ի���̬·���յ������������Ϊ�������ܹ�ȫ�淴ӳ·������������ָ����ϵX�������ʻԱ�ĸ��Ի�ƫ�����ӣ������ܹ���ӳ��ʻԱ���Ի������Ľ�ͨ·����������Ѱ��1����t0ʱ�̳���������ʼ��v0��Ŀ���vN�����ܹ������ʻԱ���Ի������·�� ����ʹ��Ŀ�꺯����С����ˣ��������ʵ�����ָ����ϵ������ʻԱ�ĸ��Ի�ƫ��ʵʱ�ر����ڽ�ͨ·�����DZ����о����ص㡣
����ʹ��Ŀ�꺯����С����ˣ��������ʵ�����ָ����ϵ������ʻԱ�ĸ��Ի�ƫ��ʵʱ�ر����ڽ�ͨ·�����DZ����о����ص㡣
2 ����ָ����ϵ����
����ij��·�ε�����ʱ�������������г̾�������г�ʱ���Dz����ģ���Ӧ�ÿ��ǿ���·�ε��ص㡢��ʻԱ�ĸ��������ض����е�����(��Ŀ�ġ�Ԥ��)�Լ���ʻ����(����������������)�����أ���ˣ�·�����۾���һ���������ԣ����˶��졣�Ӽ�ʻԱ�ĽǶȿ��ǣ���������·����ȷ������Ӧ�ۺϿ��Ǹ���Ҫ����Ӱ�����ز�������ּ�ʻԱ��������[13]�������ۺϿ��Ǽ�ʻԱ�ĸ��Ի�������·���ۺϽ�ͨ�迹����ָ����ϵ���£�
 (1)
(1)
���У�x1Ϊ·���г̾��룻x2Ϊ·��ÿ�����г�ʱ�䣻x3Ϊ���ʶȣ��ۺϿ���·�ε�ӵ���̶ȡ�����������·�����ȼ������˼��ǻ��������������ص�Ӱ�����õ�·������ָ�ꣻx4Ϊ��ȫ�ȣ�����·�ν�ͨ�¹�����������x5Ϊ·��ÿ�����г̷��ã���Ҫ����·���շѺ��ͺģ�x6Ϊ·����;���ۣ���������ʱ����;����������1����Ҫ���ǵ����ء�ֵ��˵�����ǣ�x2Ϊ·��ÿ�����г�ʱ�䣬ʵ�ʵȼ��ڶ�·����ʻ�ٶȵ����ۡ�
��Щָ��������Ͽɷ�Ϊ����ָ��Ͷ���ָ�ꡣ���Ի�ָ�������ٰ������ʶȺ���;���ۣ����IJ��ö��Եȼ����ַ���������ָ�ꣻ������ָ�����ͨ�����㡢��ģ�ȷ�������ã����г̾��롢�г�ʱ�䡢��ȫ�Ⱥ��г̷��ã�����ָ��֮������ٲ�ͬ�������˵����������ָ��Ķ��������1��ʾ��
��1 ����ָ�������
Table 1 Metrics of evaluation

�ӱ�1���Կ���������ÿ����·����ÿ�����г�ʱ�䡢���ʶȡ���ȫ�ȡ��г̷��ú���;���۵�ָ�����ʻ���۾���·���г̾���ֱ����أ�����·��Խ��ʱ�����г�ʱ�䡢���ʶȡ���ȫ�ȡ��г̷��á���;���۲�����·����۽�Խ��
3 ���������滮�ĸ��Ի���̬·���յ�
3.1 �����滮�Ļ���˼·
�����滮��һ�ִ�����Ŀ���Ż�����������Ч�������÷����ܹ��ӱ����ϰ���ʹ���ߵ�ƫ�ã��Ǵ�����Ŀ���Ż�������¿�ܡ������˼·��[14-15]������ƫ�ú������������������ijһ����ָ��ĸ��Ի���������ƫ�����ӣ�����ͬ��������ĸ�������ָ��ת��Ϊ������ͬ�������������ٵ������Ŀ�ꣻͨ���Ż���Ѱ����ۺ�Ŀ�����������Ž���Ϊ����⡣��һ������£��������ָ���ƫ�ú�����ΪClass1-S��(���ָ��ԽСԽ��)��Class2-S��(���ָ��Խ��Խ��)����Class1-S��Ϊ��(��ͼ1)����ijһ���ָ��������仮�֣�����xi1~xi5������߸�����ƫ�ø���������ָ��xi������˵�ֵ��
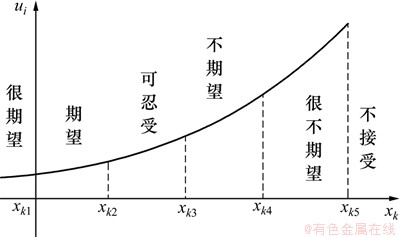
ͼ1 ��ʻԱ�Ե�·����ָ���ƫ�ú���
Fig.1 Preference function of drivers on road evaluation index
��ͼ1���Կ������Ӽ�ʻԱ��·���ĸ��Ի�ѡ����̿�������Ϊ���ڸ���·������ָ����ɽ��ܵķ�Χ�ڣ�ͨ���ڶ�̬��ͨ·���к������������ĸ��Ի���Ҫ���Զ������������ϸ��Ի�������г�·������ˣ��ۺϿ���·���յ����ص㣬��ʻԱ�ĸ��Ի�����ɷ�Ϊ����3����Ρ�
��1���Ϊ�������ԡ�����·���յ�������������ʻԱ�Ļ���Ҫ�����·��ʻ���ʶ�ָ�������ڻ����ijֵ��
��2���Ϊ��ƫ���ԡ�������ʻԱ�Ը�ָ���ƫ�ó̶ȣ���һ������£����г�ʱ��ָ����ȣ���ʻ���ָ�ע�ص�·�İ�ȫ��ָ�ꡣ
��3���Ϊ�������ԡ�����·���յ��������ʻԱ�������ԡ�����Ļ����ϣ������䡰ƫ���ԡ���������ʹ������ָ��ﵽ�ۺ����ֵ��
��ˣ����������滮˼��ĸ��Ի���̬·���յ��Ļ���˼·�ǣ����ȣ������ʻԱ�Ե�·�ġ������ԡ������ݳ�����ǰλ�ú�Ŀ�ĵ�λ�ã���̬ȷ����ͨ·�������ļ��οռ䣻��Σ������ʻԱ�Ե�·�ġ�ƫ���ԡ����������ʻԱѡ·�����е�ƫ�����ӣ��Լ��οռ��ڵĽ�ͨ·���迹���и��Ի����ۣ��õ�·�ν�ͨ�ۺ��迹����������ʻԱ�Ե�·�ġ������ԡ�������Dijkstra�㷨�ڶ�̬ȷ���Ľ�ͨ·������������·����ʵʱ�����ǰ·���迹״̬�µ�����·������·���еĽ�ͨ�迹�����仯���ʻԱ��ʻ;�б����������ʱ����ʱ����·����Ϣ������ǰ������˼·�����������ӳ�����ǰλ�õ�Ŀ�ĵص�����·����
3.2 �����ʻԱ�������ԡ�����Ľ�ͨ·���ռ䶯̬ȷ��
Ϊ������㷨ִ��Ч�ʣ��ڴ��ģ·������Ҫ���㷨���������������Ч���ơ����ǵ���ʻԱ�Ե�·ָ��ġ������ԡ�����ͨ�����·�ʽȷ��������ͨ·�����οռ䡣
Step 1 ��������ָ�ꡱ�趨���ڹ滮֮ǰ�����ս�����ʽ��ȷ����ʻԱ�Ե�·������ָ��Ŀ�����ָ��ֵxk5 (��ͼ1��k=1, 2, ��, 6)��ֵ��ע����ǣ������г̾���ָ�꣬��ʻԱ���ĵ�����ʻ��·�̣����ԣ���x15����Ϊij������1�ij���������ʻԱ����ʻ��·��Ϊ������ǰλ����Ŀ���λ�þ����x15��ʱ������Ϊ�Dz����еģ�����ָ��x25~x65���յ�����·���п�����ָ������趨��
Step 2 ��ͨ·�����οռ��������賵����ǰλ�õ�Ŀ����ֱ�߾���Ϊlod����a=x15lod/2���Գ�����ǰλ����Ŀ���λ��Ϊ��Բ���㣬��aΪ��Բ��������Բ������Բ��������Ϊ��ͨ·�������Ŀ��м��οռ䡣
Step 3 ���м��οռ�ĸ��Ի��ü�������x25~x65������Բ������������ռ���вü����������ʻԱ����ʻ;�е�ÿ������ʻʱ�䡢���ʶȡ���ȫ�ȡ��ۺϷ��ú���;���۵ġ������ԡ�����
�ɴˣ���̬ȷ�����ܹ������ʻԱ�������ԡ�����Ľ�ͨ·���ռ䡣
3.3 �����ʻԱ��ƫ���ԡ������·����ͨ�迹�ۺ�����
�ӽ�ͨ·������ָ����ϵ���Կ�������·�ε��г�ʱ�䡢���ʶȡ���ȫ�ȡ��г̷��ú���;���۵���ʻ���۾���·���г̾���ֱ����أ���·����۵ĽǶȿ��ǣ���·���г̾���Խ��ʱ�����г�ʱ�䡢���ʶȡ���ȫ�ȡ��г̷��á���;���۲�����·����۽�Խ�ݴˣ����·�躯�����£�
 (2)
(2)
���У� Ϊ·���г̾���IJ���ֵ��
Ϊ·���г̾���IJ���ֵ�� �ֱ�Ϊ��ͬ��������ĸ�������ָ��
�ֱ�Ϊ��ͬ��������ĸ�������ָ�� ת��Ϊ[0,1]��������������������ָ�꣬����ͳһ����ת��ΪClass1-S��(���ָ��ԽСԽ��)����
ת��Ϊ[0,1]��������������������ָ�꣬����ͳһ����ת��ΪClass1-S��(���ָ��ԽСԽ��)����
 (3)
(3)
 ��
�� �ֱ�Ϊ��Ӧָ��xk�����ֵ����Сֵ��
�ֱ�Ϊ��Ӧָ��xk�����ֵ����Сֵ�� Ϊ��ʻԱ��ѡ·�����ж��ڲ�ָͬ���ƫ�� ���ӡ�
Ϊ��ʻԱ��ѡ·�����ж��ڲ�ָͬ���ƫ�� ���ӡ�
��ʽ(2)��֪������ͬ·�ε�������Ϊ��ֵʱ��ʽ(1)ת��Ϊ���·��ģ�ͣ��� ������Ϊ0ʱ��ʽ(1)ת��Ϊ����ʱ��ģ�͡�
������Ϊ0ʱ��ʽ(1)ת��Ϊ����ʱ��ģ�͡�
ƫ������ �����������˼�ʻԱ�Ķ�·���յ���ƫ���������˼�ʻԱ�ж�ָ�������Ҫ�Եĸ��ӳ̶ȣ�������Ż���������е�һ�������⡣����ָ������ͼ2��ʾ��
�����������˼�ʻԱ�Ķ�·���յ���ƫ���������˼�ʻԱ�ж�ָ�������Ҫ�Եĸ��ӳ̶ȣ�������Ż���������е�һ�������⡣����ָ������ͼ2��ʾ��
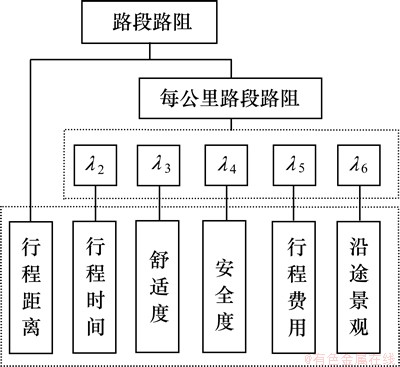
ͼ2 ��λ���ͨ�迹�ۺ�������ϵ
Fig.2 Comprehensive evaluation system of hierarchical traffic impedance
Ϊ�����ּ�ʻԱ�ĸ��Ի�ƫ�ã�����ƫ�ó̶����½���˳�����Ϊ6���ȼ���������Ҫ����������Ҫ��������Ҫ����������Ҫ����������Ҫ�����������ġ��� ���������۸�Ȩ��������Ӧ��ֵ���ֱ�Ϊ��9��7��5��3��1��0��ͨ����һ��ȷ����Ӧ��ƫ��ϵ����
3.4 �����ʻԱ�������ԡ�����Ķ�̬����·������
����Dijkstra�㷨[9]��̬�������·����������·����̬ȷ���ͽ�ͨ�迹�ۺ����۵Ĺ������Ѿ���ֿ����˼�ʻԱ�ġ����������͡�ƫ���ԡ�������ˣ��յ�·���Ƿ��ϼ�ʻԱ�ĸ����ص�ģ������ǵ�·����ͨ�迹���ص㣬�ڴ˽�������·������ʱ��������Ŀ�꺯����
 (4)
(4)
���У�fij��ʾ·Ai,j���迹���� ʱ���ڵ�vi��vj����ͨ��
ʱ���ڵ�vi��vj����ͨ��
���ȣ�����·����ͨ����ͼ�������Ӿ���F��
 (5)
(5)
Ȼ������Dijkstra�㷨������ʼ������ǰλ�ó�������������Ŀ��㣬����¼��Ӧ�Ĵ��ۣ����յõ��������ŵĿ���·����
�ڳ�����ʻ�����У���·���еĽ�ͨ�迹�仯����һ����ֵ���ʻԱ����������ʱ����ʱ����·����Ϣ������ǰ������˼·�����������ӳ�����ǰλ�õ�Ŀ�ĵص�����·����
4 ��������
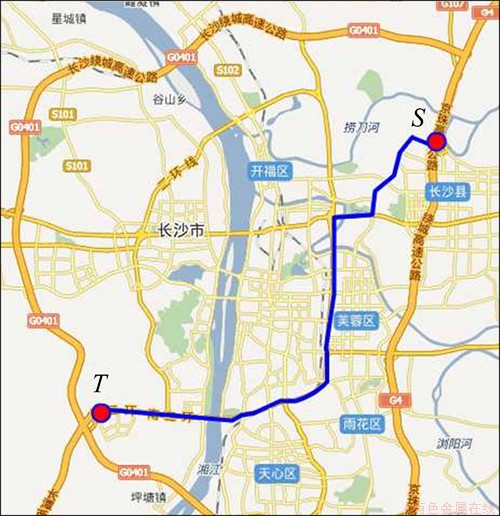
Ϊ����֤���ķ�������Ч�ԣ��Գ�ɳ����·���յ�Ϊ�������з�����֤����ͨ������ͼ3��ʾ��

ͼ3 ��ɳ������ͨ����
Fig.3 Traffic network of Changsha
��Ϊ·���յ��Ļ�����·�ν�ͨ�迹���Ա��Ľ����dz���Ҫ������·������ָ����ϵ�����Ĺ�����·�����������ݽṹΪ
��·={���ȣ�ʱ�䣬���ʶȣ���ȫ�ԣ����ã��羰}
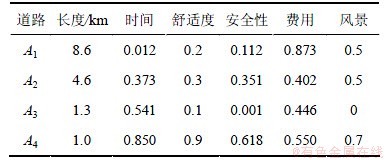
���У�ʱ�䡢���ʶȡ���ȫ�ԡ����á��羰���洢��·�ξ�����ͬ�����������������������ָ��ֵ����ͼ3����ʾ·��A1~A4Ϊ������·���迹���2��ʾ����2�У�A1Ϊ�ƳǸ���·�Σ�ʱ����ۺ�С�����ô������(�����շ�)��A2Ϊ����·�Σ�·���Ϻã�ʱ����۽�С�������ڳ����ࡢ�����������ص����⣬���°�ȫ���۽ϴ�A3Ϊ�ؽ�����������������г����������ʶȴ�����ͣ��ؽ������羰���ˣ���������ңң��������;���۴��۽���Ϊ0��A4Ϊ������ҵ����������ӵ������ʻ������ʩ���Ķ࣬����ָ����۶��ܴ�
��2 ·�ν�ͨ�迹ʾ��
Table 2 Sample of road traffic impedance
����һ��ʻԱ��S�����������Ŀ��T�㣬���մ�ͳ��·���յ��㷨�������õ�����·����ͼ4��ʾ(���У�line1Ϊ����ʱ��·����line2Ϊ��̾���·����)
��Ȼ������·����������ǵ�һָ����Ż����������ʻԱ��Ҫ���г��еİ�ȫ�ԡ������Ե�����ָ����Ҫ��ʱ���ý����Ȼ������������Ի���������ͨ��2����������֤���ķ�������Ч�ԡ�

ͼ4 ��ͳ�յ������������
Fig.4 Search results of traditional induction method
4.1 ����1
Ϊ�����ּ�ʻԱ�ĸ��Ի�����ͨ���˻������ķ�ʽ��ȷ����ʻԱ�ġ������ԡ�����ȷ����Ӧ�������ռ䣻����ü�ʻԱ���г��еķ羰�Ͱ�ȫ���ܷdz����ģ�ƫ������Ϊ���г�ʱ�䡰����Ҫ�������ʶȡ���Ҫ������ȫ�ȡ�����Ҫ�����г̷��á�����Ҫ������;���ۡ�����Ҫ�����������۸�ֵ�����и�ֵ�������й�һ�����ɵ��г�ʱ�䡢���ʶȡ���ȫ�ԡ����á��羰��Ӧ��ƫ��ϵ����2~��6�� ��
�� ��
�� ��
�� ��
�� ���Ӷ��õ���Ӧ������·����ͼ5��ʾ��
���Ӷ��õ���Ӧ������·����ͼ5��ʾ��

ͼ5 ���1�ĸ��Ի�·���յ����
Fig.5 Results of personalized route guidance for Case 1
��ͼ5���Կ�������ѡ·���ܿ��˳������ģ���·���������������٣��г�ͨ������֤�˼�ʻԱ�İ�ȫ������ͬʱ����·���־����ؽ��������ܹ�������������´ɽ�ϵ���Ȼ��⣬���ϼ�ʻԱ����;��������
4.2 ����2
������һ��ʻԱ��ͬһ������������ͬһĿ�ĵ㣬����Ի�ƫ��Ϊ���г�ʱ�䡰����Ҫ�������ʶȡ�����Ҫ������ȫ�ȡ�����Ҫ�����г̷��á�����Ҫ������;���ۡ������ġ������ݱ����յ������õ������ͼ6��ʾ��
��ͼ6���Կ�������ѡ·���Ի�����ʻΪ����·���϶̡��������������̵ƽ��١�����ͨ�����ܹ���֤�г�ʱ�䡰����Ҫ���ĸ��Ի�����ͬʱ����·���ܿ����ػ��Ǹ�����ʻ�������г̷��ô��ۣ����ϼ�ʻԱ����������
ͼ6 ���2�ĸ��Ի�·���յ����
Fig.6 Results of personalized route guidance for Case 2
5 ����
(1) ���������滮��˼�룬�����һ�ָ��Ի���̬·���յ��������÷�����ֿ��Ǽ�ʻԱ��·���յ��ĸ����������ּ�ʻԱѡ��·���������ԡ�
(2) ͨ����ʻԱ���Ի�������·���յ������е�ʵʱ�����һ���̶��ϱ����˷ֲ�ʽ��̬����ϵͳ�е�ӵ��Ư�����������������ͨϵͳ����Ч�ʡ�
(3) �Գ�ɳ����·���յ�Ϊ�������з��棬���봫ͳ������ʱ��/���·���յ��㷨������жԱȣ���֤�˱��ķ�������Ч�ԺͿ����ԣ���õ�����·���ȿ����˸������ضԳ��е�Ӱ��, �ֳ�������˲�ͬ��ʻԱ�ij�����Ը��
�ο����ף�
[1] ��Ⱥ, ��ΰ, �Ź���. ���ں�����·����·��ѡ�����о�[J]. ��������ѧ��, 2002, 16(4): 42-45.
YANG Qun, GUAN Wei, ZHANG Guowu. Study on multi-path based route choice approach[J]. Journal of Management Sciences in China, 2002, 16(4): 42-45.
[2] Lee C K. A multiple path routing strategy for vehicle route guidance systems[J]. Transportation Research, 1994, 2(3): 185-195.
[3] YANG Qun, ZHAO Yanan. A fuzzy logic-based frame work for route choice in vehicle navigation systems[J]. Journal of Systems Science and Systems Engineering, 2000, 9(4): 467-474.
[4] ������, ������. ��̬·���յ�ϵͳ���о���չ[J]. ��·��ͨ�Ƽ�, 2000, 17(1): 34-38.
YANG Zhaosheng, CHU Lianyu. Study on the development of the dynamic route guidance systems (DRGS)[J]. Journal of Highway and Transportation Research and Development, 2000, 17(1): 34-38.
[5] �ڵ���, ������, ����. ��̬������������Ĵ�Լ��K������·���㷨[J]. ���ִ�ѧѧ��: ��ѧ��, 2009, 39(��2): 172-176.
YU Dexin, YANG Zhaosheng, GAO Peng. Constrained K-shortest paths algorithm within dynamic restricted searching area[J]. Journal of Jilin University: Engineering and Technology Edition, 2009, 39(S2): 172-176.
[6] Yen J Y. Finding the K shortest loopless paths in a network[J]. Management Science, 1971, 17(11): 716-721.
[7] Lawler E. Combinatorial optimization: Networks and matroids[M]. New York: Courier Dover Publications, 1976: 92-104.
[8] ����, ������, ����. Ԥ��ӵ��Ư�ƵĴ�Լ��K������·���㷨[J]. ������ҵ��ѧѧ��, 2009, 35(3): 345-349.
WANG Yuan, YANG Zhaosheng, GAO Peng. Constrained K-shortest paths algorithm to prevent the congestion shifting problem[J]. Journal of Beijing University of Technology, 2009, 35(3): 345-349.
[9] ����, ��ɭ��, ���d. ���ڻ�ɫ�������۵�����Ӧ����·��ѡ��[J]. �й���·ѧ��, 2003, 16(4): 87-90.
SUN Yan, CHEN Senfa, HUANG Kun. Adaptive optimal route selection based on gray evaluation theory[J]. China Journal of Highway and Transport, 2003, 16(4): 87-90.
[10] ����, ��ɭ��, ��ϼ, ��. ���ڻ�ɫϵͳ���۵�����·��ѡ��[J]. ��ľ����ѧ��, 2003, 36(1): 94-98.
SUN Yan, CHEN Senfa, QI Xia, et al. Optimal route selection method based on gray system theory[J]. China Civil Engineering Journal, 2003, 36(1): 94-98.
[11] Pang K H, Cran T. Adaptive route selection for dynamic route guidance system based on fuzzy neural approaches[J]. IEEE Transactions on Vehicular Technology, 1999, 48(6): 2028-2041.
[12] ������, ������, �»���. �����������ڽ�ͨ���û�����·��ѡ���е�Ӧ���о�[J]. �й���·ѧ��, 1999, 12(����): 76-87.
YANG Zhaosheng, JIANG Guiyan, WEN Huimin. Application of fluid neuron network on route choice based on user optimum in traffic network[J]. China Journal of Highway and Transport, 1999, 12(Suppl): 76-87.
[13] ������, ½��, ���Ǿ�, ��. ���ڳ��о��ߵĹ�·����Ŀ������·���㷨[J]. ��ͨ���乤��ѧ��, 2007, 7(3): 100-105.
MA Yongfeng, LU Jian, XIANG Qiaojun. Optimal route arithmetic with multigoals in highway network based on travel decision-making[J]. Journal of Traffic and Transportation Engineering, 2007, 7(3): 100-105.
[14] McAllister C D, Smpson T W, Kemper L, et al. Robust multiobjective optimization through collaborative optimization and linear physical programming[C]//10th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference. Albany, New York, 2004: 1-16.
[15] Achill M, CHEN Xuan. Visualizing the optimization process in real-time using physical programming[J]. Engineering Optimization, 2000, 32(6): 721-747.
(�༭ �²ӻ�)
�ո����ڣ�2012-07-12�������ڣ�2012-09-23
������Ŀ������ʡ�Ƽ���������Ŀ(2012GK3069)������ʡ��Ȼ��ѧ����������Ŀ(07jj6093)
ͨ�����ߣ�����(1967-)��Ů�����ϳ�ɳ�ˣ���ɳ������ѧ����ѧ�ߣ�˶ʿ��������ʦ�����½�ͨ����������о����ѧ�������绰��0737-4628998��E-mail: longqiong@126.com

