DOI: 10.11817/j.issn.1672-7207.2018.01.010
����SLIPģ�͵�Һѹ�������Ȼ�������ֱ��Ծ����
��־ΰ��������ǿ�������죬�ƺ��֣��¸�
(�㽭��ѧ ���嶯�������ϵͳ�����ص�ʵ���ң��㽭 ���ݣ�310027)
ժҪ�����Һѹ������ʽ��������ֱ��Ծ���ƣ����һ�ֻ���SLIP��ֱ��Ծ����ѧģ��ʵ��Һѹ������������ֱ��Ծ�Ŀ��Ʋ��ԡ�����SLIP��ֱ��Ծ����ѧģ�Ͳ�����䶯��ѧ�ַ��̵õ������˶��켣�����ؽ��͵��Ȼ�������ֱ��Ծ�Ų����˶��켣ӳ�䵽SLIPģ�����ĵ��˶��켣��ͨ���������˶�ѧ���õ������˹ؽ��˶��켣���Դ������ؽ��˶���ͬʱ�����ؽ��͵��Ȼ�������ֱ��Ծ����ѧ���̺�Һѹ����ִ��������ѧ���̣�Ӧ��MATLAB/Simulink�������ж�̬��Ծ���Ʒ��沢�����������顣�о��������������SLIP��ֱ��Ծ����ѧģ�͵Ŀ��Ʋ��Կ�ʵ��Һѹ�������Ȼ����˳����ȶ�����ֱ��Ծ��Ϊ��ʽ�����˶�̬��̬���߿����о��ṩ�ο���
�ؼ��ʣ����ɵ����ڣ����Ȼ����ˣ�Һѹ��������ֱ��Ծ
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2018)01-0072-08
Vertical hopping control of hydraulically actuated single-legged robot based on SLIP
CHEN Zhiwei, JIN Bo, ZHU Shiqiang, PANG Yuntian, HUANG Hanlin, CHEN Gang
(State Key Laboratory of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China)
Abstract: For the vertical dynamic hopping control of hydraulically actuated legged robot, a control strategy based on the vertical hopping dynamics of SLIP (spring loaded inverted pendulum) was presented. The vertical hopping dynamics of SLIP was analyzed and the motion trajectory of its CoM (center of mass) was obtained by solving the differential equation of its dynamics. The motion trajectory of articulated single-legged robot��s hip was mapped to that of SLIP��s CoM. Then the joint motion trajectory, which drove the robot��s joint motion, was obtained by inverse kinematics of robot. Furthermore, by establishing the vertical hopping dynamics of articulated single-legged robot and hydraulic actuator dynamics, the simulation of vertical hopping was done in the software of MATLAB/Simulink. And meanwhile the vertical hopping experiment was done on robot prototype. The results show that the hydraulically actuated single-legged robot is able to hop continuously and stably with a control strategy based on the vertical hopping dynamics of SLIP, which provides reference for the control of the dynamic gait walking of legged robot.
Key words: SLIP; single-legged robot; hydraulically actuate; vertical hopping
��ʽ�����˶�̬��̬(��С�ܡ���Ծ)������㲻���γ�֧����Ϳɱ�֤�����ȶ���ͬʱ����Խ���ϴ�ߴ���ϰ���ڷǽṹ�������������������ʱ���кܴ������[1]����Ϊ�������о�������ȵ���ѵ㡣Ϊ��ʵ����ʽ�������Զ�̬��̬ͨ������棬RAIBERT��[2]�����˿������о�����������Ծ�����˶�̬��̬���ƽ���ɶ�����3���֣�1) ��̬��Ծ���ƣ�2) ǰ���ٶȿ��ƣ�3) ��̬���ơ��ڴ˻����ϣ�RAIBERT��[2]�����ȶ�̬���Ʋ�����չ����˫�㡢��������˵Ŀ��ƣ�ʵ���˶�������˵Ķ�̬��Ծ��̬�Ŀ��ƣ��ڴ˻������з���Һѹ�������������BigDog[3]��WildCat[4]��LS3[5]�ȡ����Ȼ����˶�̬��Ծ������RAIBERT��[2]�����3�������������������������⣬Ҳ�Ƕ��������ʵ�ֶ�̬��̬���ߵĵײ���Ƶĺ��ġ���ѩ���[1, 6-7]���о���������˶�̬��̬����ǰ���Ե�����Ծ��������ֱ��Ծ���ƽ���������о���SLIP(spring loaded inverted pendulum�����ɵ�����)ģ��һֱ���о������ද�ﱼ�ܺ���ʽ�����˶�̬��Ծ��̬������ģ�ͣ��о����ڸ�ģ�ͽ��ж�̬��̬�ķ����о�[8-10]��ʵ���˶������͵��Ȼ����˶�̬��Ծ����[11-12]��PROSSER��[13]�ڻ���SLIPģ�͵ĵ��Ȼ�������ʵ������Ծ�߶ȵĿ��ơ�KOEPL��[14]Ӧ��SLIPģ�͵ı�������ѧʵ���˵��Ȼ����˱��ܲ�̬�¿����ŵ�³�����ơ�SARANLI��[8]����������ײ������SLIPģ�Ͳ�Ӧ�����Ŀ����ڵ��Ȼ�������ʵ������Ծ�߶ȵĿ��ơ����Һѹ������ʽ�����˶�̬��Ծ���ƣ��������߽�SLIPģ��ӳ����Һѹ�������Ȼ����ˣ��Ի������Ų�Ϊģ�����ģ�����λ���Ų���������ˣ�ͬʱ�����Ȼ�������ֱ��Ծ�Ų����˶��켣ӳ�䵽SLIPģ�����ĵ������˶��켣��ͨ���������˶�ѧ���õ������˹ؽ��˶��켣���Դ����������˹ؽ��˶���ʵ�ֵ��Ȼ�������ֱ��Ծ�˶���
1 Һѹ�������Ȼ�������SLIPģ����ֱ��Ծ����
1.1 Һѹ�������Ȼ�����
Һѹ�������Ȼ�����Ϊ�ؽ�����ʽ�����ˣ���ͼ1��ʾ�������Ų������ȡ�С���Լ����4���֣���������2���ؽ����ɶȣ��ֱ�Ϊʸ״�����Źؽ���չ���������ɶ��Լ�ϥ�ؽ���չ���������ɶȡ�2����ת�ؽڶ���Һѹ���������ֱ�����ת�����˻����Ͱڶ����˻�����Һѹ������ֱ���˶�ת��Ϊ�������Źؽڵ���ת��ϥ�ؽڵ���ת�˶����������Ų������Ӱ�̽���˫��ֱ����Ļ����ϣ���ˣ��Ų���������ֱ�������ɻ���������������ƶ���ת�����ɶȶ��ܵ�Լ����Ϊʵ�ֶԻ����˵Ŀ��ƣ������˹ؽڴ���װ�Ƕȱ��������ڼ��ؽڽǶȣ������ϰ�װ�߶ȱ��������ڼ��������Ų��ƶ���λ�ƣ�Һѹ��������ϰ�װ�����������ڼ�⸺������Һѹ�����Ϳڵ�ѹ�����������ڼ�����ѹ�������������������һ�������ڻ���������ŵ�ʱ����Ի����˵�˲�������ŷ���������װ�ڷ����ϣ�������Һѹ����Ϳ�ͨ����������
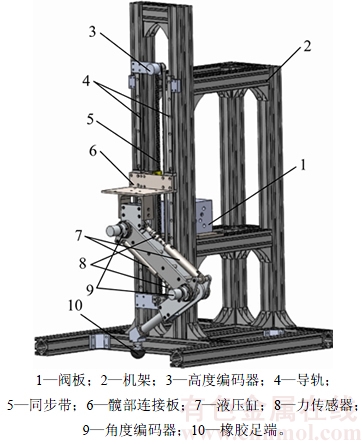
ͼ1 Һѹ�������Ȼ�����
Fig. 1 Hydraulically actuated single-legged robot
1.2 SLIPģ����ֱ��Ծ����
SLIPģ�ͽ�����һ���նȵ����������ɼ����������ϣ���̬�˶������ж��ܺ͵������ܼ�����ת��������������ģ���֤���Ľ��������ԵĶ�̬��Ծ������ʽ����������ͨ�����������������˵Ķ�̬��Ծ[15]����SLIPģ�͵�ˮƽ�ٶ�Ϊ0 m/sʱ��Ϊ��ֱ��Ծ�˶���
������SLIPģ�����Ľ��ܵ��������ã������������˶���������ʱ��Ϊ��ʼʱ�̣����Ķ���ѧ������ʽ(1)��ʾ���˶��켣��ʽ(2)��ʾ��
 (1)
(1)
 (2)
(2)
ʽ�У� Ϊ���ļ��ٶȣ�m/s2��gΪ�������ٶȣ�m/s2��l0Ϊϵͳ����ԭ����m��zCoGΪ���ĸ߶ȣ�m��tΪʱ�䣬s��v0Ϊ���������ٶȣ�m/s��
Ϊ���ļ��ٶȣ�m/s2��gΪ�������ٶȣ�m/s2��l0Ϊϵͳ����ԭ����m��zCoGΪ���ĸ߶ȣ�m��tΪʱ�䣬s��v0Ϊ���������ٶȣ�m/s��
 (3)
(3)
ʽ�У�HΪ������Ծ�߶ȣ�m��
 (4)
(4)
ʽ�У�TflΪ������ʱ�䣬s��
�ŵ���SLIPģ�����Ķ���ѧ����Ϊ
 (5)
(5)
ʽ�У�mCoGΪ����������kg��kΪ���ɸնȣ�N/m��
�ö��׳�ϵ������������ַ��̵Ľ�Ϊ
 (6)
(6)
ʽ�У� ��Ϊϵͳ��ȻƵ�ʣ�rad/s���ŵ�ʱ��Ϊ
��Ϊϵͳ��ȻƵ�ʣ�rad/s���ŵ�ʱ��Ϊ
 (7)
(7)
ʽ�У�TstΪ�ŵ���ʱ�䣬s��
2 Һѹ�������Ȼ�������ֱ��Ծģ��
2.1 ���Ȼ�������ֱ��Ծ����ѧģ��
���Ȼ��������Ų���Ϊ����δ�ܵ���ȫԼ������ֱ����������ƶ�����ˣ������Ȼ�������Ϊ���������Ķ����ϵͳ[16]���ɽ���������������q������ѧ����������q�ĺ�����ʾΪ
 (8)
(8)
ʽ�У�qΪ�����˹�������������qbΪ�����˸��������������������ڻ������Ų��ܵ���ֱ�����Լ�������������ֵ���䣬�ڹ������������в������������Ϣ����ˣ�qb=(z)T��zΪ�������Ų��߶ȣ�m��qrΪ�����������ؽڽǶ�������qr=(qH, qK)T��qHΪ�ŹؽڽǶȣ�(��)��qKΪϥ�ؽڽǶȣ�(��)��
����������ŵ�ʱ������ܵ����Ե���������������������ؽ����ط�����ͼ2��ʾ���������˵�ˮƽ��������������ֱ�����������ֱ�ΪFx��Fy�����У�Fx���Źؽں�ϥ�ؽڲ��������طֱ�Ϊ��xH�ͦ�xK��Fy���Źؽں�ϥ�ؽڲ��������طֱ�Ϊ��yH�ͦ�yK��
�����˿�����(���ŵ���)�����Ķ��嶯��ѧ����������ŵ�(������)�¼����жϣ������һ�ֶ��嶯��ѧ����[17]����ˣ��ֱ��л������ŵ���Ϳ�����Ķ���ѧ���̡�
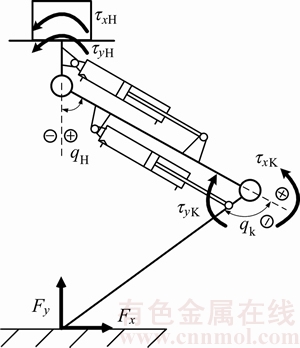
ͼ2 �������ŵ���ʱ���������ؽ����ط���
Fig. 2 End-effector force and joint torque analysis of robot on stance phase
�ŵ���ʱ�����Ȼ����˶���ѧģ�͵Ķ���ѧ����Ϊ
 (9)
(9)
ʽ�У� ��
�� �ֱ�Ϊ����������ٶȺͼ��ٶȾ���M(q)Ϊ���������Ծ���B(q, )Ϊ�������Ŀ�������������������g(q)Ϊ����������������SΪ�����ؽ����ص�ѡ�����Ϊ�ؽ�������������Ϊ��˵�������������JΪ�ſ˱Ⱦ���
�ֱ�Ϊ����������ٶȺͼ��ٶȾ���M(q)Ϊ���������Ծ���B(q, )Ϊ�������Ŀ�������������������g(q)Ϊ����������������SΪ�����ؽ����ص�ѡ�����Ϊ�ؽ�������������Ϊ��˵�������������JΪ�ſ˱Ⱦ���
�����ŵ����ڼ���������û�л���������ܵ�����Լ�������ã��ٶȼ����ٶ�����Ӵ�Լ���������ֱ���ʽ(10)��ʽ(11)��ʾ��
 (10)
(10)
 (11)
(11)
ʽ�У� ��
�� �ֱ�Ϊ�ѿ����ռ��»������ŵ���ʱ������ٶ�����ٶ�������
�ֱ�Ϊ�ѿ����ռ��»������ŵ���ʱ������ٶ�����ٶ������� Ϊ�ſ˱Ⱦ�����֡�
Ϊ�ſ˱Ⱦ�����֡�
�������˶���ѧ����(9)����ʽ(11)�ɵõ���������˽Ӵ�������ʽ��
 (12)
(12)
ʽ(12)�����ö��嶯��ѧ���̵ı���ʽ���ɹ��ƻ�������˽Ӵ�������������ýӴ������������Ӵ�����Ϊ�����������������
�ٽ���������˽Ӵ���ʽ(12)����ʽ(9)�ɵû������ŵ���ʱ�Ķ���ѧ���̣�
 (13)
(13)
ʽ�У���=(JM-1JT)-1��Ϊ֧�ſռ���Ծ���N=I-M-1JT��J��Ϊ������̬֧�ŷ���ռ����[18]��IΪ��λ����
����������ŵ�˲�������������ײʱ��ܶ���Ϊ��ȫ�ǵ�����ײ����ײ������ٶ�˲���Ϊ0 m/s�����ǻ�������̬û�з����仯���������˶���ѧ����ʽ(9)���߽��л��ֵõ���

 (14)
(14)
ʽ�У�t0Ϊ��ײǰ˲��ʱ�̣�s����tΪ��ײ����ʱ�䣬s����������ŵ�ʱ�ij���[19]Ϊ
 (15)
(15)
IsΪ����ŵ�ʱ�ij�������������t��0ʱ��ʽ(14)�Ⱥ���ߵ�1��Ϊ0����
 (16)
(16)
��ʽ(10)���ŵغ�����ٶ�Ϊ0 m/s��������
 (17)
(17)
��ʽ(17)����ʽ(16)�ɵû������ŵ�˲����˳�����ʾʽ��
 (18)
(18)
��ʽ(18)����ʽ(16)���ŵغ�����˹������꣺
 (19)
(19)
������ʱ�����˳������������ⲻ���������������䶯��ѧģ�͵Ķ���ѧ����Ϊ
 (20)
(20)
2.2 Һѹִ��������ѧģ��
Һѹ�������Ȼ������Źؽں�ϥ�ؽڵ�ִ������Ԫ��ͬ������Һѹ���ŷ�����������ͼ3��ʾ��Ϊ����������ŵ�˲��������Ի�����ϵͳ��ɵ�Ӱ�죬��Һѹ�Ľ����Ϳڼ���������ס�
�ֱ��Һѹ����ǻ���и�ǻ��д���������Է��̣�����ij��Һѹ��ǻ�ڵ����������ʹ��ǻ���ݻ������仯�⣬��������ѹ����Һ��ʹ��Һ��ѹ���仯���ο�GUGLIELMINO��[20]��д�����������Է��̣�����ǻ���и�ǻ�İ��ŷ���������������ֱ���д�����������Է���ͳһ��1����ʽ��
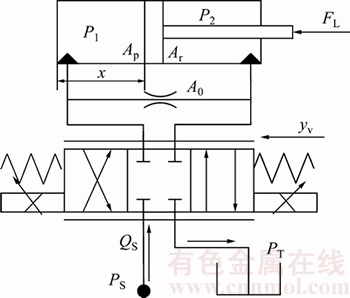
ͼ3 Һѹ�������Ȼ�����ִ������Ԫ
Fig. 3 Actuator unit of hydraulically actuated single-legged robot
��ǻ���������Է���Ϊ

 (21)
(21)
�и�ǻ���������Է���Ϊ
(22)
ʽ�У�pS��pT�ֱ�Ϊ�ó���ѹ���ͻ���ѹ����Pa��p1��p2�ֱ�ΪҺѹ����ǻ���и�ǻѹ����Pa�� ��
�� �ֱ�ΪҺѹ����ǻ���и�ǻѹ�����֣�BeffΪҺѹ���������ģ����Pa��cdΪ����������ϵ����QNΪ����������m3/s����pNΪ��������ʱ���������ڵ�ѹ���Pa����Ϊ��Һ�ܶȣ�kg/m3��V1��V2�ֱ�ΪҺѹ����ǻ���и�ǻ�뷧�ڼ�������m3��
�ֱ�ΪҺѹ����ǻ���и�ǻѹ�����֣�BeffΪҺѹ���������ģ����Pa��cdΪ����������ϵ����QNΪ����������m3/s����pNΪ��������ʱ���������ڵ�ѹ���Pa����Ϊ��Һ�ܶȣ�kg/m3��V1��V2�ֱ�ΪҺѹ����ǻ���и�ǻ�뷧�ڼ�������m3�� ΪҺѹ�����ٶȣ�m/s��yvΪ��һ����ķ�о�ƶ�λ�ƣ�yv��[-1,1]��Ap��Ar�ֱ�ΪҺѹ����ǻ��������и�ǻ��ǻ�������m2��A0Ϊ����������m2��kic��kec�ֱ�ΪҺѹ����й©����й©������ʽ(21)��ʽ(22)�еķ��ź�������ֱ�Ϊ
ΪҺѹ�����ٶȣ�m/s��yvΪ��һ����ķ�о�ƶ�λ�ƣ�yv��[-1,1]��Ap��Ar�ֱ�ΪҺѹ����ǻ��������и�ǻ��ǻ�������m2��A0Ϊ����������m2��kic��kec�ֱ�ΪҺѹ����й©����й©������ʽ(21)��ʽ(22)�еķ��ź�������ֱ�Ϊ
 (23)
(23)
 (24)
(24)
ʽ�У�bΪһ�������
Һѹ��������ѧ���̣�
 (25)
(25)
ʽ�У�FcylΪҺѹ����N��FLΪҺѹ������˸�������N��FfΪ�����ܵ���Ħ������N��mpΪҺѹ������ǻ����Һ�����ܺͣ�kg��BlΪ�������ϵ����N��s/m�� ΪҺѹ�������ٶȣ�m2/s��Һѹ����ѧ����ʽΪ
ΪҺѹ�������ٶȣ�m2/s��Һѹ����ѧ����ʽΪ
 (26)
(26)
�о��߶�Һѹ��Ħ����ģ�ͽ������о�������������ģ�ͣ����нϵ��͵�����StribeckĦ��ģ�ͽ�����Һѹ��Ħ����ģ�ͣ���Ħ��ģ�Ͱ���3�����֡�
1) ������������Һѹ�����ٶȵķ�������һ��������
2) ��̬����������Ҫ�ڳ�����Һѹ��������ǰ����Ȼ���־�ֹ��ʱ�̣����ڻ�������ǰָ����˥����
3) ���������������Ħ������Ψһ�����Թ�ϵ��һ���Һѹ�������ٶȳ����ȡ�
������3�����Һѹ��StribeckĦ����ģ����ѧ����ʽΪ
 (27)
(27)
ʽ�У�BvΪ�������Ħ��������(N��s/m)��Fc0Ϊ��������N��Fs0Ϊ��Ħ������N��CsΪ��Ħ����˥��ϵ����Ҳ��ΪStribeck�ٶȣ�m/s��
����ڻ�еϵͳ���ŷ���������̬Ƶ�ʸ��ڻ����˻�еϵͳƵ�ʼ������������ŷ���������̬�����Զ���ϵͳ��ʾ��
 (28)
(28)
ʽ�У�uvΪ�ŷ����������źţ�V����vΪ�ŷ�������ȻƵ�ʣ�rad/s��Dv Ϊ�ŷ���������ϵ����N��s/m��
3 �����������������
3.1 �����������
��MATLAB/Simulink���������н���2.1�ں�2.2��������Һѹ�������Ȼ�������ֱ��Ծ����ѧģ�ͺ�Һѹִ��������ѧģ�ͣ������˲������1��ʾ����ֱ��Ծ���ƿ�ͼ��ͼ4��ʾ���������Թؽ�Ŀ��Ƕ�Ϊ����Ŀ�꣬�ŵ�����ٹؽ��˶��켣���ؽ��˶��켣ͨ���������Ų��˶��켣���˶�ѧ������õ�����������ŵ���ֱ����PID(proportion- integration-differentiation������-����-��)��������PD(proportion- differentiation������-��)�������Ի����˹ؽ��˶����и��ٿ��ơ������������λ�ù�0�жϻ������ŵأ��ŵ����Ի��������������0�жϻ�����������
��1 Һѹ�������Ȼ����˲���
Table 1 Parameter of hydraulically actuated single-legged robot

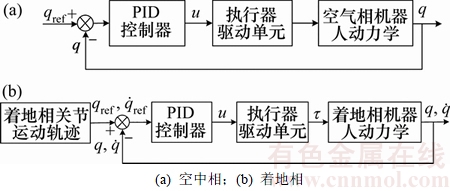
ͼ4 ���Ȼ�������ֱ��Ծ����
Fig. 4 Vertical hopping control of single-legged robot
SLIPģ�͵���������Ϊ11 kg�����������������ɸն�Ϊ2 010 N/m�����������ٶȵش����0.64 m�ĸ߶����������������˶����߹滮�����˹ؽڵ��˶��켣���Źؽں�ϥ�ؽ��˶�������4�ζ���ʽ���Ϊ��
 (29)
(29)
 (30)
(30)
�ؽڽǶȵ�λΪ(��)���������ŵ�ǰ�Źؽں�ϥ�ؽڽǶȷֱ�Ϊ40���-80�㣬�ؽڽǶȶ��������[21]��Һѹϵͳϵͳѹ��Ϊ6 MPa�����Ȼ����˼�SLIPģ����ֱ��Ծ��������ͼ5~8��ʾ��
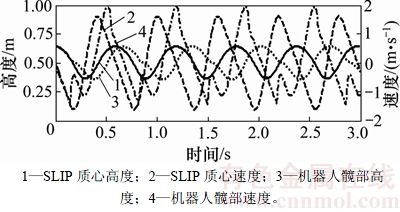
ͼ5 SLIP������������Ų��߶����ٶ�
Fig. 5 Height and velocity of SLIP CoM and robot��s hip
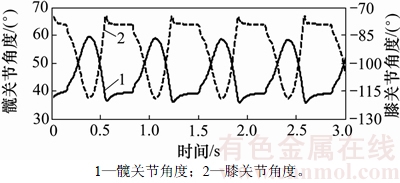
ͼ6 �����˹ؽ��˶��켣
Fig. 6 Motion trajectory of robot��s joint
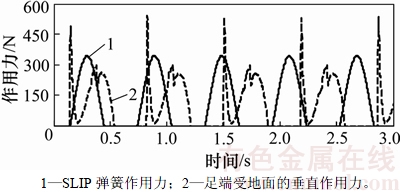
ͼ7 SLIP���������������������ܵ���Ĵ�ֱ������
Fig. 7 Vertical reaction force of SLIP and robot��s end-effector
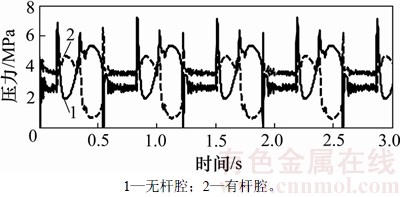
ͼ8 ϥ�ؽ�Һѹ����ǻѹ��
Fig. 8 Hydraulic pressure of chambers of hip cylinder
������ƻ�����ʵ���˳����ȶ�����������Ծ���������Ų���Ծ�߶���SLIPģ�����ĵ����߶�һ�£��������Ų���SLIP���ĸ߶����ٶ�������ͼ5��ʾ�������˹ؽ��˶��켣��ͼ6��ʾ���ŵ�������˹ؽڸ��ٹؽ��˶��켣ʹ�������Ų�����SLIPģ�������˶��켣����������ɻ����˹̶���̬���ƣ��Źؽں�ϥ�ؽڽǶȷֱ�Ϊ40���-80�㣬Ϊ�������ŵ���������SLIPģ�͵���ĩ����ȫ�����ŵز�ͬ������������ŵ�Ϊ����ȫ�����ŵأ��ŵ�˲������������������ڳ�����������˲����ϴ�Ĵ�ֱ����������ͼ7��ʾ���ŵس��ʹ��ϥ�ؽ�Һѹ����ǻ�γɽϴ��Һѹ�������ͼ8��ʾ����ͼ8��֪���ŵ����м�ʱ��ϥ�ؽ�Һѹ����ǻ���ֽϴ�ѹ��������ǻ���и�ǻ�γɽϴ��ѹ���˵����ʱ���������������ײ�����ʼ�������ȣ�Ϊ��Ծ�ṩ�㹻�������������ŵ������ʱ��ϥ�ؽ�Һѹ���и�ǻ���ֽϴ�ѹ����˵����ʱ�����˹ؽڿ�����������������
3.2 ����������
�Һѹ����������Ծ����ƽ̨�������Ȼ������⣬������Һѹ��վ�Ϳ���ϵͳ��������ƽ̨�Ͻ��л���SLIP��ֱ��Ծ����ѧģ�͵���ֱ��Ծ�������飬���Ʋ��ԡ�ϵͳ�����Լ���ʼ����������������ͬ��
�������һ�£����ñ��Ľ��ܵĿ��Ʋ��Կ���ʵ�ֵ��Ȼ�����������������Ծ���������Ų��߶����ٶ�������ͼ9��ʾ���Ų��˶��켣���ٶ�������ͼ5�������ӽ����ؽ��˶�������ͼ10��ʾ��ϥ�ؽ�Һѹ�������������ͼ11��ʾ�����У����ű�ʾ����������ѹ����������ʱ�����������С���ŵ���Һѹ��������������Ϊ1 690 N��ϥ�ؽ�Һѹ����ǻѹ����ϵͳѹ����ͼ12��ʾ����ͼ8������һ�£��ŵ�˲���������ϥ�ؽ�Һѹ����ǻ�γ�Һѹ���������Һѹ����ǻ����Ĵ��ڣ�Һѹ����ڿɽ��ܵķ�Χ�ڣ����ŵ����м�ʱ�̻����˿�ʼ�������ȣ�Һѹ����ǻ���и�ǻ���γɽϴ��ѹ���Ϊ��Ծ�ṩ�㹻������������ֱ������������
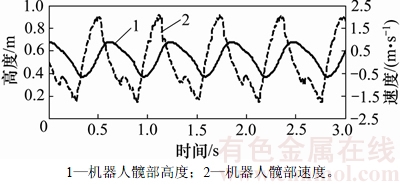
ͼ9 �������Ų��߶����ٶ�
Fig. 9 Height and velocity of robot hip
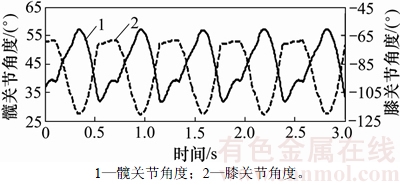
ͼ10 �����˹ؽ��˶��켣
Fig. 10 Motion trajectory of robot��s joint
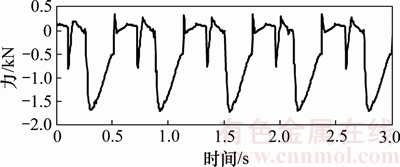
ͼ11 ϥ�ؽ�Һѹ�����������
Fig. 11 Reaction force of hydraulic rod chamber of robot��s knee

ͼ12 ϥ�ؽ�Һѹ����ǻѹ����ϵͳѹ��
Fig. 12 Hydraulic pressure of knee cylinder chambers and hydraulic system
4 ����
1) ����SLIPģ����ֱ��Ծ������ѧ�ַ��̵õ������˶��켣������Һѹ�������Ȼ�������Ծ����ѧ���̺�Һѹ����ִ��������ѧ���̣��õ��������ŵ�˲����������Ϊ����ȫ������ײ����˳�����ʾʽ��
2) �����Ȼ�������ֱ��Ծ�Ų����˶��켣ӳ�䵽SLIPģ�����ĵ������˶��켣������MATLAB/Simulink�������ʵ�ֵ��Ȼ����������ȶ�����ֱ��Ծ���������Ų���Ծ�߶���SLIPģ�����ĵ����߶�һ�¡��ŵ����м�ʱ�̣���ǻ���и�ǻ�γɽϴ��ѹ�����ʱ�����������������ײ�����ʼ�������ȣ�Ϊ��Ծ�ṩ�㹻�������������ŵ������ʱ��ϥ�ؽ�Һѹ���и�ǻ���ֽϴ�ѹ������ʱ�������˹ؽڿ���������������
3) ����SLIP��ֱ��Ծ����ѧģ�͵�Һѹ�������Ȼ����˿ɽ��г����ȶ�����ֱ��Ծ����Ϊ��ʽ�����˶�̬��̬���߿����о��ṩ�ο���
�ο����ף�
[1] ��ѩ��, ������, �뻪ɽ, ��. Һѹ������������˵�����ֱ��Ծ�˶����������[J]. ������, 2013, 35(2): 135-141.
ZHANG Xunfeng, QIN Xiansheng, FENG Huashan, et al. Motion analysis and control of a single leg of hydraulically actuated quadruped robots during vertical hopping[J]. Robot, 2013, 35(2): 135-141.
[2] RAIBERT M H. Legged robots that balance[M]. Cambridge, England: The MIT Press, 1986: 58-69.
[3] RAIBERT M, BLANKESPOOR K, NELSON G, et al. Bigdog, the rough-terrain quadruped robot[C]// Proceedings of the 17th World Congress. Seoul, Korea: International Federation of Automatic Control, 2008: 10822-10825.
[4] ANTHONY S. Meet DARPA's WildCat: A free-running quadruped robot that will soon reach 50 mph over rough terrain [EB/OL]. [2015-12-11]. http://www.extremetech.com/extreme/ 168008-meet-darpas-wildcat-a-free-running-quadruped-robot-that-will-soon-reach-50-mph-over-rough-terrain.
[5] BOSTONDYNAMICS. LS3-legged squad support systems[EB/OL]. [2015-12-11]. http:// www. bostondynamics.com/robot_ls3.html.
[6] FOCCHI M. Strategies to improve the impedance control performance of a quadruped robot[D]. Genoa: University of Genoa of Department of Advanced Robotics, 2013: 29-42.
[7] BLICKHAN R. The spring-mass model for running and hopping[J]. Journal of Biomechanics, 1989, 22(11): 1217-1227.
[8] SARANLI U, ARSLAN  , ANKARALI M M, et al. Approximate analytic solutions to nonsymmetric stance trajectories of the passive spring-loaded inverted pendulum with damping[J]. Nonlinear Dynamics, 2010, 62(4): 729-742.
, ANKARALI M M, et al. Approximate analytic solutions to nonsymmetric stance trajectories of the passive spring-loaded inverted pendulum with damping[J]. Nonlinear Dynamics, 2010, 62(4): 729-742.
[9] YU H, LI M, WANG P, et al. Approximate perturbation stance map of the slip runner and application to locomotion control[J]. Journal of Bionic Engineering, 2012, 9(4): 411-422.
[10] HUANG K J, LIN P C. Rolling SLIP: a model for running locomotion with rolling contact[C]// 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Kaohsiung, China: IEEE, 2012: 21-26.
[11] POULAKAKIS I, GRIZZLE J W. Monopedal running control: SLIP embedding and virtual constraint controllers[C]// 2007 IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems. San Diego, California: IEEE, 2007: 323-330.
[12] PEUKER F, SEYFARTH A, GRIMMER S. Inheritance of SLIP running stability to a single-legged and bipedal model with leg mass and damping[C]// The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics. Roma, Italy: IEEE, 2012: 395-400.
[13] PROSSER J, KAM M. Control of hopping height for a one-legged hopping machine[J]. Proceedings of SPIE-The International Society for Optical Engineering, 1996, 1831: 604-612.
[14] KOEPL D, JONATHAN H. Impulse control for planar spring- mass running[J]. Journal of Intelligent & Robotic Systems, 2014, 74(3): 589-603.
[15] GEYER H, SEYFARTH A, BLICKHAN R. Spring-mass running: simple approximate solution and application to gait stability[J]. Journal of Theoretical Biology, 2005, 232(3): 315-328.
[16] HUTTER M. StarlETH & Co.�Cdesign and control of legged robots with compliant actuation[D]. Zurich, Switzerland: ETH Z RICH of Swiss Federal Institute of Technology, 2013: 89-108.
RICH of Swiss Federal Institute of Technology, 2013: 89-108.
[17] REMY C D. Optimal exploitation of natural dynamics in legged locomotion[D]. Zurich: ETH ZRICH of Swiss Federal Institute of Technology, 2011: 15-28.
[18] HUTTER M, REMY C D, HPFLINGER M A, et al. SLIP running with an articulated robotic leg[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei, China: IEEE, 2010: 4934-4939.
[19] ZHENG Y, HEMAMI H. Mathematical modeling of a robot collision with its environment[J]. Journal of Robotic Systems, 1985, 2(3): 289-307.
[20] GUGLIELMINO E, SEMINI C, YANG Y, et al. Energy efficient fluid power in autonomous legged robotics[C]// Proceedings of the ASME 2009 Dynamic Systems and Control Conference. California: American Society of Mechanical Engineers, 2009:847-854.
[21] ��־ΰ, ��, ����ǿ, ��. Һѹ����������������˵������������[J]. ũҵ����ѧ��, 2016, 32(5): 36-42.
CHEN Zhiwei, JIN Bo, ZHU Shiqiang, et al. Design and experiment of single leg of hydraulically actuated bionic multilegged robot[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(5): 36-42.
(�༭ ����ƽ)
�ո����ڣ�2017-03-16�������ڣ�2017-05-04
������Ŀ(Foundation item)��������Ȼ��ѧ�������о�Ⱥ���ѧ����������Ŀ(51521064)��������Ȼ��ѧ����������Ŀ(41506116)���㽭ʡ��Ȼ��ѧ����������Ŀ(LY13E050001) (Project(51521064) supported by Science Fund for Creative Research Groups of National Natural Science foundation of China; Project(41506116) supported by the National Natural Science Foundation of China; Project(LY13E050001) supported by the Natural Science Foundation of Zhejiang Province)
ͨ�����ߣ�����ʿ�����ڣ���ʿ����ʦ�����»���Һ���ƣ����ܻ����˿����о���E-mail: bjin@zju.edu.cn

